艦載裝備便攜式高精度振動監測系統的設計
2018-08-24 07:50:16,,,
計算機測量與控制 2018年8期
, ,,
(1.海軍航空大學 岸防兵學院,山東 煙臺 264001; 2.海軍91115部隊,浙江 定海 316000)
0 引言
隨著亞丁灣護航、環球出訪、聯合演習等任務的不斷增多,我海軍艦艇出海時間越來越長,艦艇及艦載武器裝備經受了全年全球各種海況下的考驗,但也為艦載裝備的保障提出了新的難題。其中,對艦載裝備實施全時域、全海域環境狀態監測,對監測數據進行分析處理進而提高保障效率、增強可靠性、發揮武器效能是一個重要環節。針對艦載武器振動環境測量儀器缺乏的困境,本文采用高精度振動測量傳感器設計了一款便攜式艦載武器振動監測系統,能有效滿足各種安裝、貯存位置下艦載裝備的振動測量。
1 總體設計
考慮到振動測量的便捷性與時效性,艦載裝備的振動測量與數據分析分別由三軸傳感器、高精度振動監測儀和安裝數據分析處理軟件的下位機組成[1-3],如圖1所示。其中,4個三軸傳感器用來采集/監測艦船裝備的振動沖擊信號;高精度振動監測儀由PC104主控模塊、數據采集模塊、12路信號調理器、LVDS顯示屏、電源轉換及管理模塊、大容量數據存儲模塊和大容量鋰電池組成,完成對傳感器采集的振動數據初步處理和存儲功能[4];下位機為安裝數據分析和處理軟件的計算機,用于完成對高精度振動監測儀下載數據的波形、功率譜等分析功能。通常,高精度振動監測儀和傳感器安裝在被監測對象上(艦船或艦載裝備),高精度振動監測儀可由單相交流220 V供電,也可由內部大容量鋰電池供電;下位機置于數據存儲管理中心。
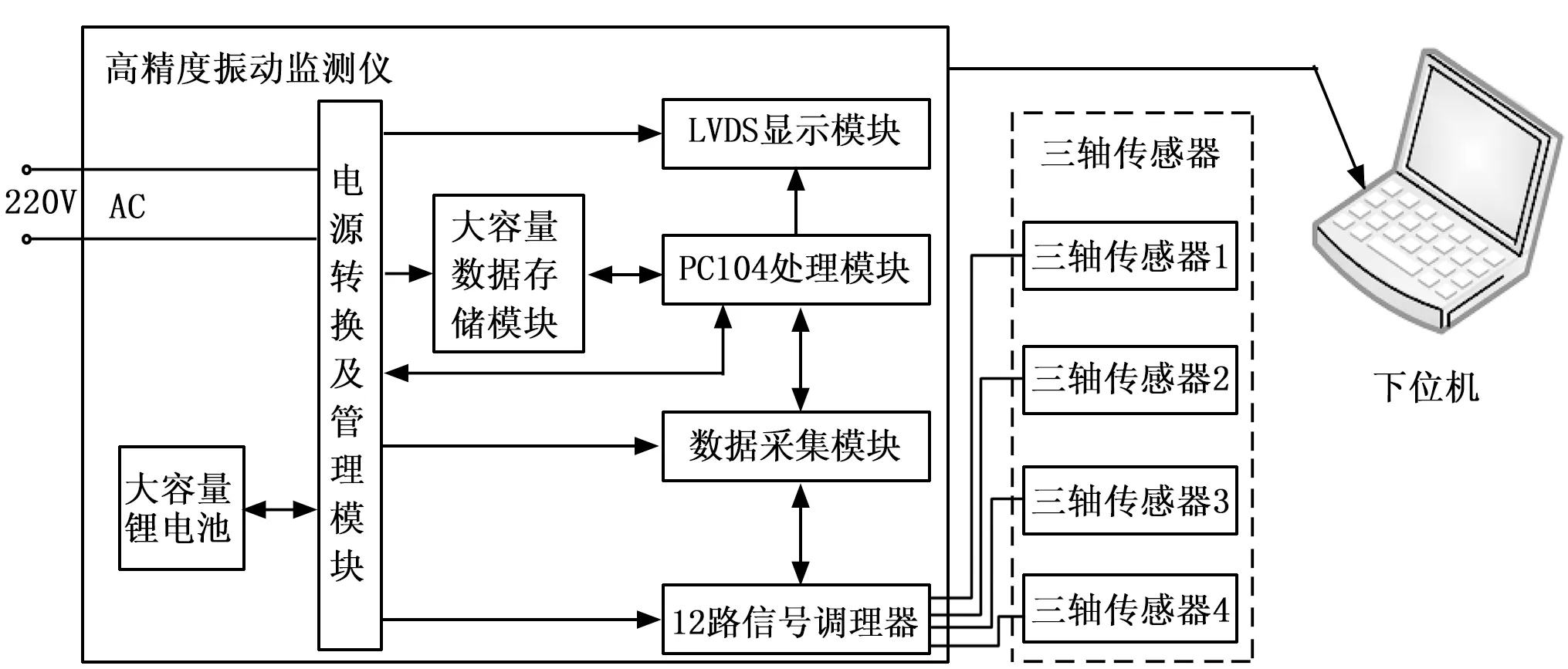
圖1 振動測量系統組成框圖
2 硬件設計與選型
2.1 振動測量儀基本指標
根據被測對象及監測環境需求,振動測量儀應滿足以下基本指標:
監測信號路數:≥12;
振動信號分辨率:≤0.000 02 g;
監測頻率:0.1~1 kHz;
工作溫度:-25~+75 ℃;
連續工作時間: ≥120小時(DC供電);
≥90天(220 VAC供電);
重量:≤15 kg(含蓄電池);
長寬高:≯450 mm×300 mm×200 mm。
2.2 高精度振動監測儀設計
2.2.1 PC104主控模塊選型
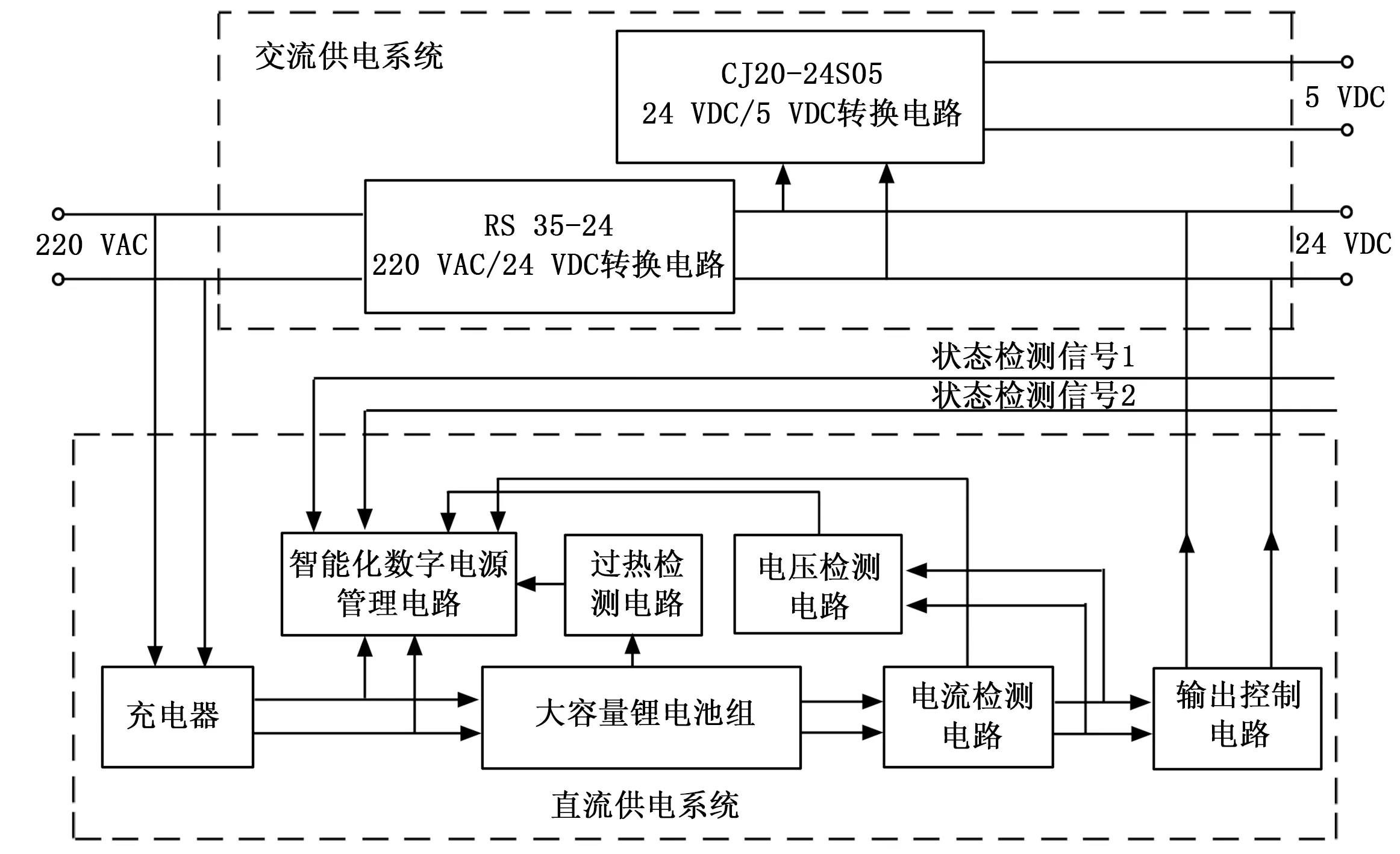
圖2 電源轉換及管理模塊原理圖
PC104主控模塊選用深藍宇的PCM-3587,該模塊是一款性價比極高、尺寸極其緊湊、專為PC104應用設計的嵌入式控制模塊。它的Vortex86DX處理器整合了南北橋、SPI BIOS、LPC、串/并口、高速USB2.0及10 M/100 M以太網等資源,尤其是采用的超低供電圖形顯示芯片VolariTMZ9S總耗電量僅為1 W,但其VGA顯示輸出高達1 600×1 200;此外,顯示芯片Z9S可以很容易地連接平板顯示,且支持TFT和LVDS輸出。這些特點使得振動監測儀更容易實現設備體積小、功耗低等設計指標。
2.2.2 數據采集模塊選型
數據采集模塊選用深藍宇的基于PC104總線PCL-2101,該模塊具有16路12位分辨率的模擬量輸入通道、4路12位分辨率的模擬量輸出通道、24路TTL/CMOS數字I/O通道、6通道16位可編程定時器/計數器、4路8位的PWM輸出通道以及可編程外圍接口等資源,且具有250 kHz的最大A/D采樣率、1024位數據深度FIFO緩存等優異性能指標,特別適用于結構緊湊、高可靠的嵌入式應用。
2.2.3 信號調理器
由于所選用高精度三軸振動傳感器需要24 VDC/4 mA的恒流源供電,且輸出信號疊加在8~12 V直流偏壓上,因此需要對振動信號進行調理,振動儀選用了與三軸傳感器相匹配的8通道信號調理器LC0201。每通道均可有效濾除傳感器疊加的直流偏壓,調理信號頻率可達0.1 Hz~30 kHz,工作電壓為直流18~36 V,可提供三軸傳感器所需的24 VDC/4 mA的直流恒流源。由于采用4個三軸振動傳感器,共需12路信號調理通道,故需要兩臺信號調理器完成12路信號調理。
2.2.4 LVDS顯示模塊
考慮到振動儀的便攜性與功耗,顯示模塊選用了尹萊仕光電科有限公司的7寸LVDS液晶模組+USB觸摸模塊SVB-LT0701-TP,它集成LVDS驅動板模塊、USB觸摸控制模塊、7寸LED數字工控屏和4線電阻觸摸屏;具有24位LVDS信號輸入、標準USB接口、背光控制接口等資源;恒流LED背光工作模式,工作溫度范圍-20~+70 ℃,存儲溫度范圍-25~+80 ℃,功耗小于0.5 W;非常便于接入ARM系統和嵌入式工控主板。
2.2.5 電源轉換及管理模塊
振動儀交流220 V和直流蓄電池兩種供電模式,若被監測裝備可以提供220 V交流電,則采用交流供電,否則采用直流蓄電池供電;不管采用直流供電還是交流供電,都要轉換為振動儀需要5 V和24 V兩種直流電源。此外,為充分提高蓄電池供電效率、盡可能延長無交流供電時系統工作時間,綜合運用電源管理總線、電壓動態調整、動態電能均衡等技術研制了智能化數字電源管理電路,該電路與過熱、過壓、電流監測、220 VAC/24 VDC轉換電路和24 VDC/5 VDC轉換電路共同構成電源轉換與管理模塊[5],如圖2所示。
2.3 三軸振動傳感器
依據監測需求,考慮艦載裝備特點[6],三軸振動傳感器選用了朗斯測試技術有限公司的LC0161壓電加速度傳感器,該傳感器內裝微型IC放大器,將傳統的壓電加速度傳感器與電荷放大器集一體,能直接與記錄、顯示和采集儀器連接,簡化了監測系統、提高了測試精度和可靠性;其振動信號分辨率為0.000 02 g,X軸、Y軸和Z軸的靈敏度分別為1 008 mV/g、1 000 mV/g和1 008 mV/g,頻率測量范圍為0.1~1 000 Hz(±10%),可抗300 g沖擊,溫度范圍為-30~+80 ℃,適應全球95%以上海域。
LC0161三軸振動傳感器采用先進的隔離剪切和三角剪切結構,美國原裝進口的微型IC放大器基本組成為MOS場效應管,并由輸入端的高阻值電阻與傳感器電容構成一個一階高通濾波器,由此確定傳感器測量中的低頻截止頻率。內置IC傳感器信號輸出具有兩線聯接特征,即信號輸出線與供微型IC放大器用的恒流源輸入線為同一根線,另一根為地線,信號輸出線可以用屏蔽效果好的低噪聲同軸電纜。傳感器內部結構以及與信號調理器電氣連接如圖3所示。
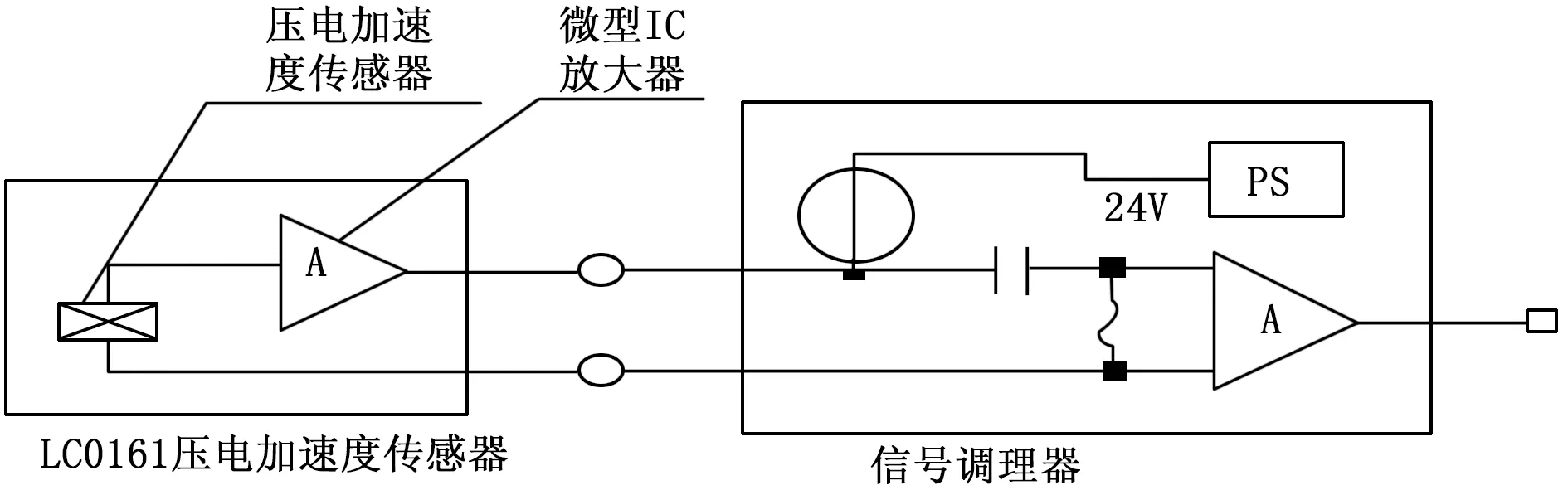
圖3 三軸振動傳感器內部結構及與信號調理器連接圖
3 軟件設計
振動監測系統的軟件部分除數據顯示、報警、參數設置等基本程序外,主要包括數據采集程序、數據處理程序和數據分析程序,其中數據采集程序安裝在振動儀上,數據處理程序和數據分析程序安裝在下位機上[7-8];重點介紹數據采集、數據處理和數據分析的設計。
3.1 數據采集程序
數據采集程序將4個三軸振動傳感器采集的12路模擬信號轉換為數字信號并存儲,流程如圖4所示。數據采集程序首先對PCL-2101數據模塊進行初始化,然后通過向一個8位的通道選擇寄存器寫入地址來選擇振動監測數據輸入通道,寄存器的低4位選擇低通道,高4位選擇高通道,若低4位和高4位為相同值,則表示是同一個通道,這樣A/D變換時,模塊選中的通道寄存器會自動遞增到選擇范圍內的下一個通道,避免了在同一組通道上進行A/D變換時變更通道地址;通道選擇后,完成模擬前端電路設置大概需要10 μs,而后即可在選擇的通道上進行A/D變換;由于A/D變換器完成一次A/D變換至少需要10 μs的時間,而處理器和軟件運行都很快,因此需要一個查詢來完成延遲等待;完成A/D變換后,就可以從A/D變換器中讀取變換后的數據,該數據是一個12位的數據,讀數據時,先讀出一個低8位的數據、再讀出一個高4位的數據,最后得出的12位無符號整數即為該次采集數據;數據存儲后,即可結束采集或轉換通道進行再次采集。
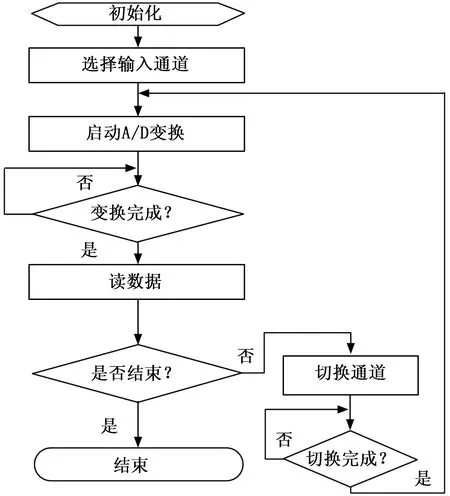
圖4 數據采集程序流程圖
3.2 數據處理程序
綜合考慮振動監測儀監測數據量大與內置存儲空間有限的問題,監測數據采用了占用空間較小的二進制模式進行存儲,且各傳感器采集的數據是連續存儲的,因此,采集的數據是按時間序列存儲的一長串二進制文件,而數據處理程序主要完成12個通道采集數據的分離及數據由二進制轉換為十進制兩個功能。由于PCL-2101模塊具有12位的分辨率,即每采集一個數據占12個二進制位,而2塊模塊的模擬量輸入最多16路,因此可用4位二進制數表示,這樣采集的數據和通道號合起來共16位,組成2個字節,即每個A/D數據占2個字節,其高4位為采集數據的通道位,低12位為采集的加速度值的二進制表示。因此,可將高4位作為數據通道分離的標志符,其值應小于12。充分利用高4位數據,確定每個采集數據的起始與終止是關鍵,也是數據處理的難點之一。數據處理流程如圖5所示。其中,“搜索標志位”用于界定單次采樣數據的位置;“數據起始標志位”和“數據結束標志位”用于判定該次數據是否為對應通道的數據;“搜索規則”用于判定分離的數據通道;“轉換規則”用于避免轉換的數據不是采集的12位振動傳感數據。
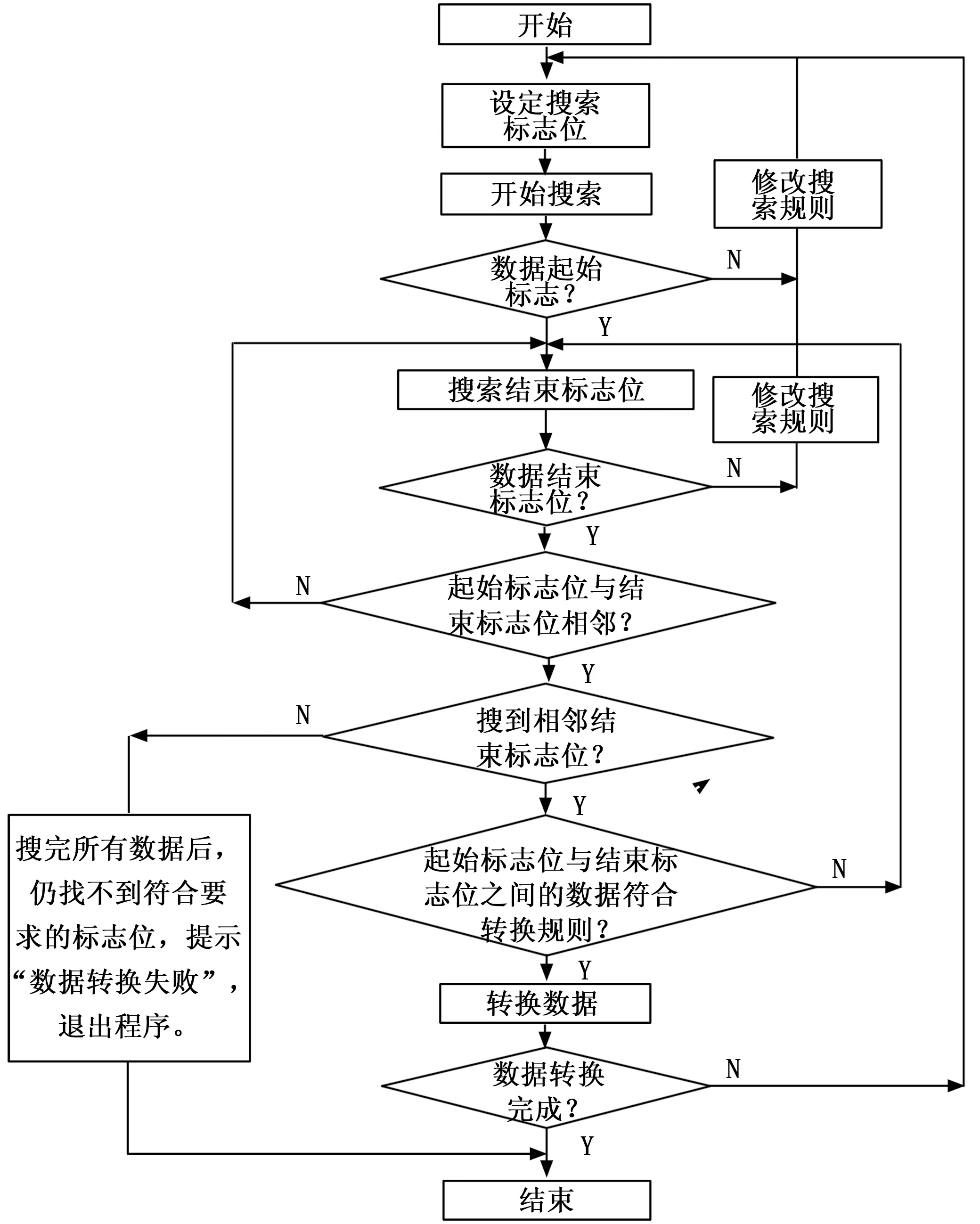
圖5 數據轉換程序流程圖
3.3 數據分析程序
理論上,可利用各種算法對采集的數據進行分析,達到對艦載裝備的監測目的。本系統中,主要對數據進行數據顯示及功率譜分析,得到在典型海況和工作情況下艦載裝備的受到的沖擊范圍、頻次與功率譜。數據分析程序主要利用安裝于下位機的Matlab軟件編程完成,時域顯示較為簡單,即繪制3.2中轉換數據和采樣時間(或采樣點數)波形。隨機振動功率譜分析中的功率譜密度是結構在隨機振動載荷激勵下響應的統計結果,一般可表示為功率譜密度值與頻率的關系曲線。在此采用了改進的周期圖估計方法來對監測的振動信號進行功率譜分析[9-10],體現在兩個方面,一是用平均法降低功率譜估計的方差,即將數據分成不重疊的數據段,然后求平均的周期圖,平均的段越多,估計結果的方差也就越小,但隨著分段的增加,雖然方差減小了,估計的偏差會變大,因此在使用平均周期圖法時,需要在估計期望值偏差和估計方差之間進行權衡;二是使用非矩形窗的方法來改進周期圖估計方法,即在周期圖前給每段信號加一個非矩形的數據窗,因為窗在兩邊漸變為0,所以這種方法降低了由于重疊導致的段間統計相依的效應,且實踐表明,取合適的窗函數(如海明窗、漢寧窗或凱塞窗)和一半段長度的重疊率,可以最有效的降低估計的偏差。
4 應用結果及分析
4.1 某型艦載裝備振動環境的監測
振動儀研制成功后,對多型艦船、多型艦載裝備進行多海況、全天候振動環境監測,取得了大量振動監測數據,為艦載裝備的設計、維修保障和可靠性分析提供了真實、海量數據支持。圖6為應用該振動儀對某型艦載導彈艦上貯存狀態下振動環境監測應用圖,圖中4個三軸振動傳感器通過強力磁座吸附于設備上(也可以通過轉接螺栓等其他固定方式以適應不同監測環境),且傳感器安裝方向Z軸指向艦艏方向,X軸指向水平向上,Y軸與X軸、Z軸構成右手系指向右弦;綠色箱子為振動儀;黑色箱子為傳感器及數據傳輸線存放箱。由于監測對象無交流供電系統,因此,監測全程采用內置蓄電池組直流供電,經實際記錄,蓄電池可供振動儀以24次/s(12個通道每秒鐘各采集2次)的采樣頻率不間斷工作144小時。
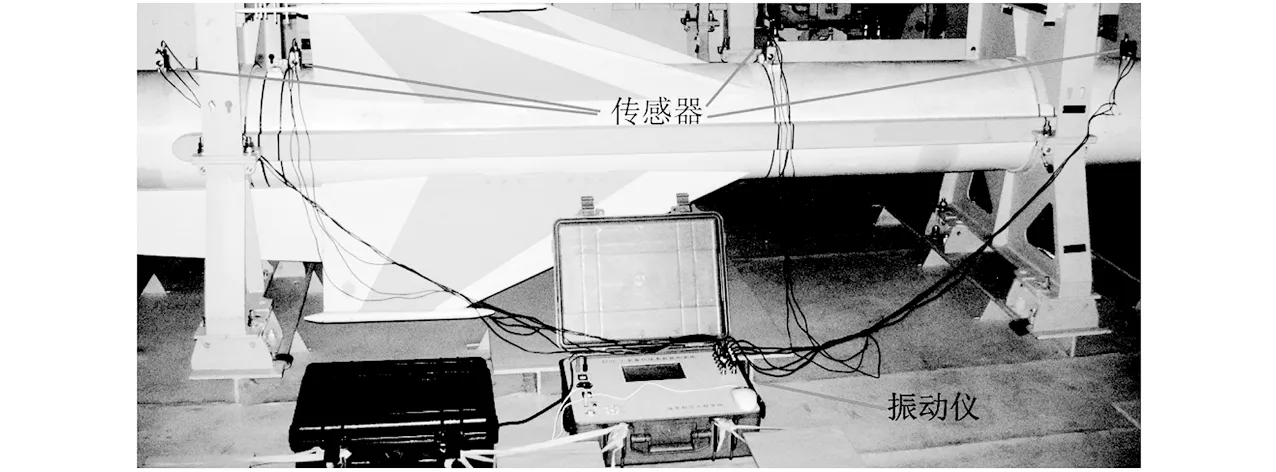
圖6 某型艦載裝備振動監測圖
4.2 實驗結果分析
針對某次軍艦遠洋訓練時,海況較好且快速航行狀態下,對艦載導彈的振動監測數據(1號傳感器)處理后,繪出的時域振動波形如圖7~圖9所示。可以看出,艦載導彈受到的上下振動沖擊較為平衡,典型值為0.012 g,最大不超過0.028 g;左右振動沖擊不平衡,左右向典型值分別為0.01 g和0.025 g,左右向最大值分別為0.28 g和0.059 g;前后振動沖擊不平衡,前后向典型值分別為0.017 g和0.015 g,前后向最大值分別為0.037 g和0.019 g。
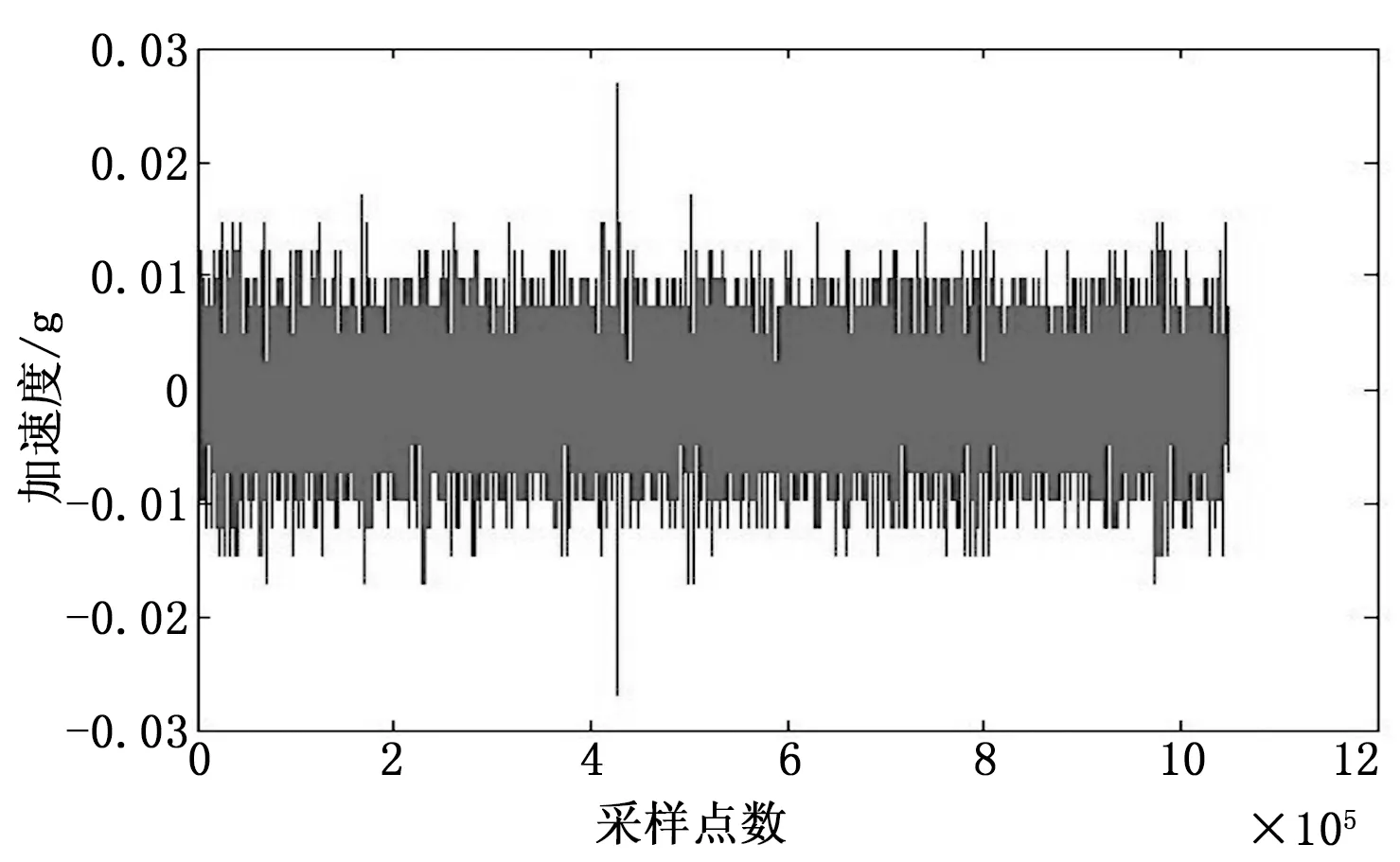
圖7 1號傳感器X軸(上下)振動波形圖
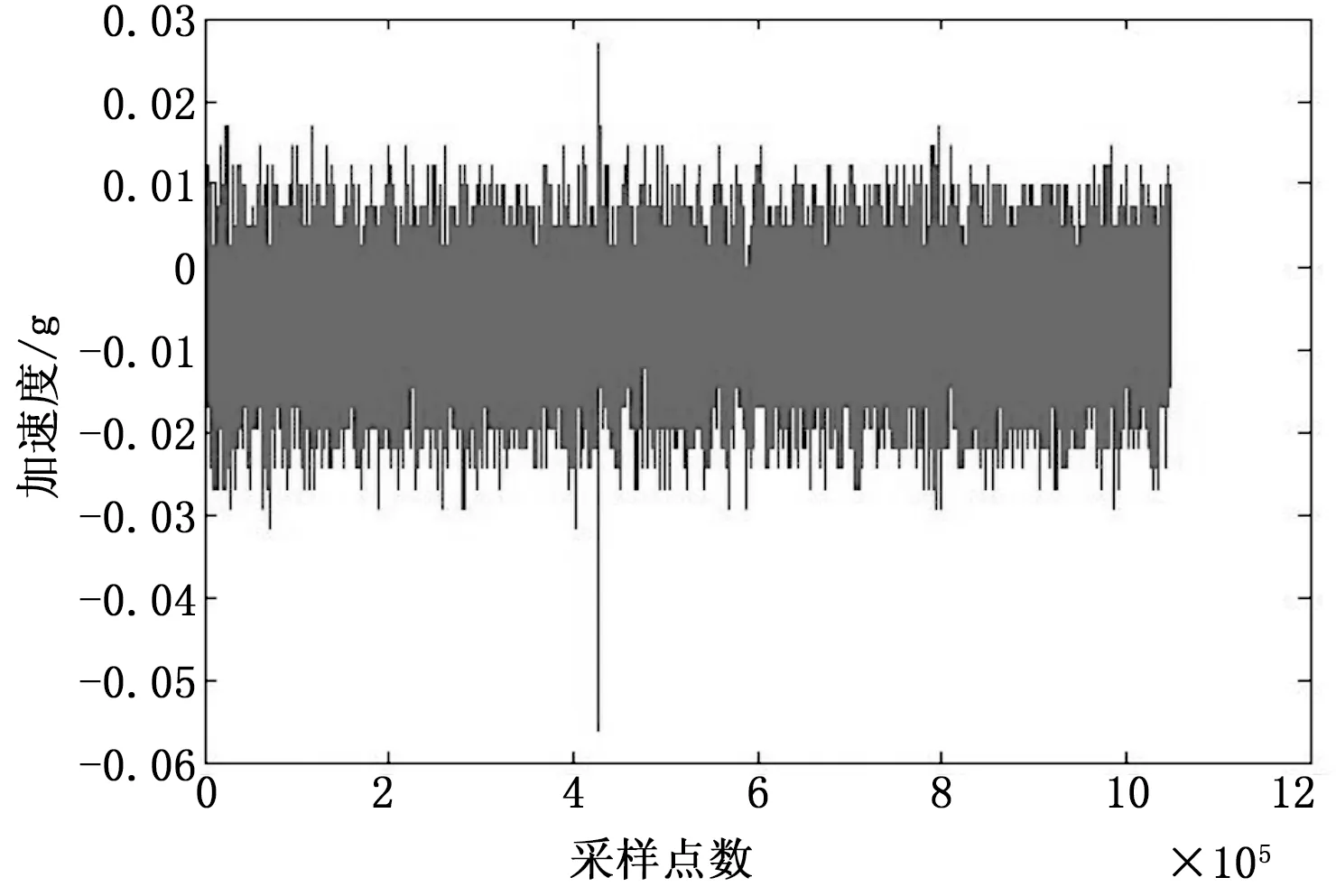
圖8 1號傳感器Y軸(左右)振動波形圖

圖9 1號傳感器Z軸(前后)振動波形圖
5 結束語
掌握全球各海域全天候海況參數對實現我國海軍前出作戰、全球保障、裝備適應性和可靠性設計具有重要意義,本系統設計研制后,批量裝配于我國海軍護衛艦、驅逐艦等各類艦艇,利用遠洋訓練、實彈演習、綜合演練、全球出訪等各種時機,采集了各種海域、各種海況下艦載裝備承受的振動/沖擊參數。國內各武器裝備生產廠家對大批量采集數據進行分析處理,將分析結果用于現役裝備改進和新型裝備設計,有效提高了裝備的適應性和可靠性。實際應用表明,該系統具有精度高、體積小、功耗低、易于運輸、便于安裝、可靠性高等優點。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國生殖健康(2019年3期)2019-02-01 06:12:26
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
