基于擾動(dòng)觀測(cè)器的機(jī)械臂自適應(yīng)反演滑模控制
2018-08-24 08:50:08,,,2
計(jì)算機(jī)測(cè)量與控制 2018年8期
,,,2
(1.河南科技大學(xué) 信息工程學(xué)院,河南 洛陽(yáng) 471023; 2.河南科技大學(xué) 電氣工程學(xué)院,河南 洛陽(yáng) 471023)
0 引言
機(jī)械臂憑借靈活操作型,在工業(yè)制造、農(nóng)業(yè)采摘及航天探索等領(lǐng)域有著廣泛的應(yīng)用[1-3]。在許多實(shí)際任務(wù)中,對(duì)機(jī)械臂實(shí)現(xiàn)精確的軌跡跟蹤控制必不可少。但是,機(jī)械臂屬于一類(lèi)非線性復(fù)雜系統(tǒng),并且具有較強(qiáng)的耦合特征,其數(shù)學(xué)模型存在一定的不確定性,主要包括參數(shù)不確定性、未建模動(dòng)態(tài)和外界未知干擾等[4]。
模型的不確定性使機(jī)械臂的軌跡跟蹤控制變得困難,為了克服這個(gè)問(wèn)題,自適應(yīng)控制、魯棒控制、滑模控制、模糊控制和神經(jīng)網(wǎng)絡(luò)控制等多種方法被大量采用。然而,由于算法的局限性,單一的控制算法通常很難達(dá)到預(yù)期的效果。因此,根據(jù)不同算法的特點(diǎn),眾多學(xué)者嘗試了各種混合控制策略,以實(shí)現(xiàn)機(jī)械臂精確跟蹤期望軌跡,并取得了較好的效果。
文獻(xiàn)[5]使用RBF神經(jīng)網(wǎng)絡(luò)為參數(shù)完全未知的機(jī)械臂在關(guān)節(jié)空間設(shè)計(jì)了一種新的自適應(yīng)神經(jīng)網(wǎng)路控制算法,實(shí)現(xiàn)了閉環(huán)系統(tǒng)所有信號(hào)的最終一致有界,而且沿著周期或回歸跟蹤軌跡實(shí)現(xiàn)了部分神經(jīng)網(wǎng)絡(luò)權(quán)值的收斂以及未知閉環(huán)系統(tǒng)動(dòng)態(tài)的局部準(zhǔn)確逼近,即確定學(xué)習(xí)。文獻(xiàn)[6]提出了一種用于空間機(jī)械臂軌跡跟蹤控制任務(wù)的自抗擾控制算法,將系統(tǒng)模型及未知外擾作為系統(tǒng)的總和擾動(dòng),并利用擴(kuò)張狀態(tài)觀測(cè)器對(duì)該擾動(dòng)進(jìn)行觀測(cè)補(bǔ)償,提高了系統(tǒng)的抗擾性能。文獻(xiàn)[7]在不確定動(dòng)力學(xué)的假設(shè)下,利用模糊自適應(yīng)控制,解決了模型不確定的機(jī)械臂軌跡跟蹤控制問(wèn)題,同時(shí)實(shí)現(xiàn)了機(jī)械臂在工作空間中的避碰規(guī)劃。針對(duì)具有內(nèi)部參數(shù)不確定性和外部干擾的電驅(qū)動(dòng)自由空間機(jī)械手,文獻(xiàn)[8]提出了一種基于干擾觀測(cè)器的模糊自適應(yīng)魯棒跟蹤控制方法。采用其中基于自適應(yīng)擾動(dòng)觀測(cè)器的輸出反饋控制來(lái)解決控制問(wèn)題,模糊邏輯系統(tǒng)在線調(diào)整參數(shù)以補(bǔ)償?shù)刃Ц蓴_。文獻(xiàn)[9]介紹了一種基于動(dòng)態(tài)結(jié)構(gòu)模糊小波神經(jīng)網(wǎng)絡(luò)(FWNNs)的魯棒自適應(yīng)控制結(jié)構(gòu),結(jié)構(gòu)性和非結(jié)構(gòu)性不確定性由模糊小波神經(jīng)網(wǎng)絡(luò)補(bǔ)償,自適應(yīng)滑模控制對(duì)各種動(dòng)態(tài)參數(shù)進(jìn)行在線調(diào)整,最終實(shí)現(xiàn)工業(yè)機(jī)械臂的軌跡跟蹤控制。此外,文獻(xiàn)[10]給出了一種基于模型預(yù)測(cè)控制算法的排爆機(jī)器人末端軌跡跟蹤方法。文獻(xiàn)[11]提出了一種自適應(yīng)二階滑模控制方法,解決系統(tǒng)不確定性缺少上界先驗(yàn)知識(shí)的問(wèn)題。
上述方法均實(shí)現(xiàn)了對(duì)機(jī)械臂系統(tǒng)的軌跡跟蹤控制,但是在考慮模型不確定性的時(shí)候,大多數(shù)將結(jié)構(gòu)性不確定性(包括參數(shù)不確定、未建模動(dòng)態(tài)等)與非結(jié)構(gòu)性不確定性(包括外界干擾,測(cè)量誤差等)合并為一個(gè)未知變量處理。本文分別考慮參數(shù)不確定性和外界未知干擾,提出了一種基于非線性擾動(dòng)觀測(cè)器的自適應(yīng)滑模控制策略。利用非線性擾動(dòng)觀測(cè)器對(duì)未知擾動(dòng)進(jìn)行觀測(cè)補(bǔ)償。并在反演滑模控制中引入自適應(yīng)律,保證閉環(huán)系統(tǒng)的穩(wěn)定性同時(shí)提高系統(tǒng)的魯棒性。以二連桿機(jī)械臂為例,仿真結(jié)果表明,提出的控制策略可以實(shí)現(xiàn)關(guān)節(jié)軌跡的快速跟蹤,并效價(jià)抑制滑模控制的抖振。
1 機(jī)械臂動(dòng)力學(xué)模型
針對(duì)一類(lèi)n關(guān)節(jié)串聯(lián)型剛性機(jī)械臂,由拉格朗日功方程可得其動(dòng)力學(xué)[12]表達(dá)式:

(1)
實(shí)際應(yīng)用中,由于機(jī)械臂僅部分參數(shù)已知,并且存在未建模動(dòng)態(tài)及未知外界干擾,很難得到精確的數(shù)學(xué)模型。因此,考慮模型不確定性和外界,完整的機(jī)械臂動(dòng)力學(xué)方程可表示為:

(2)
其中:F表示模型誤差,包括參數(shù)不確定性和未建模動(dòng)態(tài);d(t)表示外部擾動(dòng)。對(duì)二者作如下假設(shè):


(3)
式中,y為系統(tǒng)輸出。
2 控制器設(shè)計(jì)
為了消除模型不確定性對(duì)系統(tǒng)性能的影響,設(shè)計(jì)一種基于擾動(dòng)觀測(cè)器的自適應(yīng)反演滑模控制器。設(shè)計(jì)過(guò)程中,擾動(dòng)觀測(cè)器用來(lái)對(duì)外部擾動(dòng)進(jìn)行觀測(cè)補(bǔ)償,自適應(yīng)律則彌補(bǔ)模型誤差帶來(lái)的影響。完整的控制器結(jié)構(gòu)如圖1所示。
2.1 非線性擾動(dòng)觀測(cè)器
據(jù)機(jī)械臂系統(tǒng)模型,采用如下形式的非線性擾動(dòng)觀測(cè)器[13]:
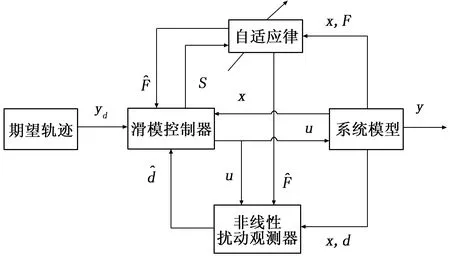
圖1 控制器結(jié)構(gòu)圖

(4)


(5)
根據(jù)假設(shè)1,由式(3)~(5),可得觀測(cè)器的動(dòng)態(tài)方程為:

(6)
(7)
由此可知,選擇合適的正定矩陣L(x),觀測(cè)器誤差可按指數(shù)收斂。
(8)
2.2 反演滑模控制
設(shè)期望軌跡為yd,系統(tǒng)跟蹤誤差可定義為:
z1=y-yd
(9)
對(duì)z1求導(dǎo),可得:
(10)
取虛擬控制量α1=c1z1,c1>0.定義:
(11)
定義Lyapunov函數(shù):
(12)
則:
(13)

對(duì)z2求導(dǎo),可得:
(14)
定義Lyapunov函數(shù):
(15)
式中,s為滑模面函數(shù),且:
(1)對(duì)于一個(gè)探測(cè)器,一組值均勻地覆蓋其參數(shù)范圍。如果檢測(cè)器具有P個(gè)參數(shù),則為每個(gè)參數(shù)分別計(jì)算出4個(gè)均勻分布的值。每個(gè)參數(shù)4個(gè)值的組合將在檢測(cè)器的參數(shù)空間中給出4P個(gè)點(diǎn)。
s=kz1+z2,k≥0
(16)
(17)
對(duì)V2求導(dǎo),可得:
(18)
2.3 自適應(yīng)律
在反演滑模控制的基礎(chǔ)上,引入自適應(yīng)律,對(duì)系統(tǒng)模型誤差進(jìn)行預(yù)估補(bǔ)償。定義Lyapunov函數(shù):
(19)
對(duì)V3求導(dǎo),可得:
(20)
由式(20)得滑模控制律器為:
(21)
其中:h>0,β>0.
(22)
2.4 穩(wěn)定性證明
將式(21)和式(22)代入式(20),可以得到:
(23)
選擇如下轉(zhuǎn)換矩陣:
(24)

(25)
由式(23)可得:
(26)
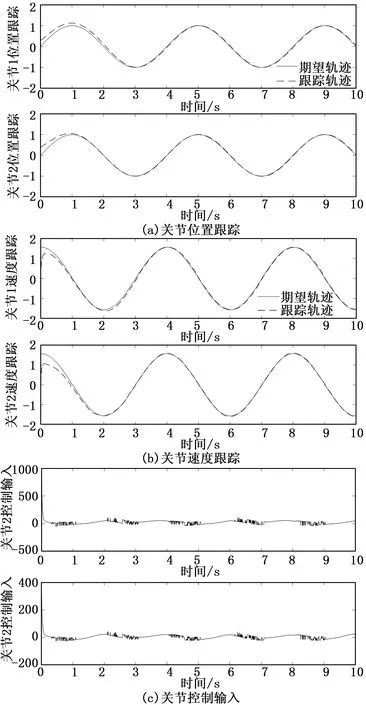
圖3 反演滑模控制(無(wú)擾動(dòng)觀測(cè)器)
3 仿真實(shí)例
以雙關(guān)節(jié)機(jī)械臂為例,如圖2所示,利用所提出的控制策略,進(jìn)行仿真實(shí)驗(yàn)。
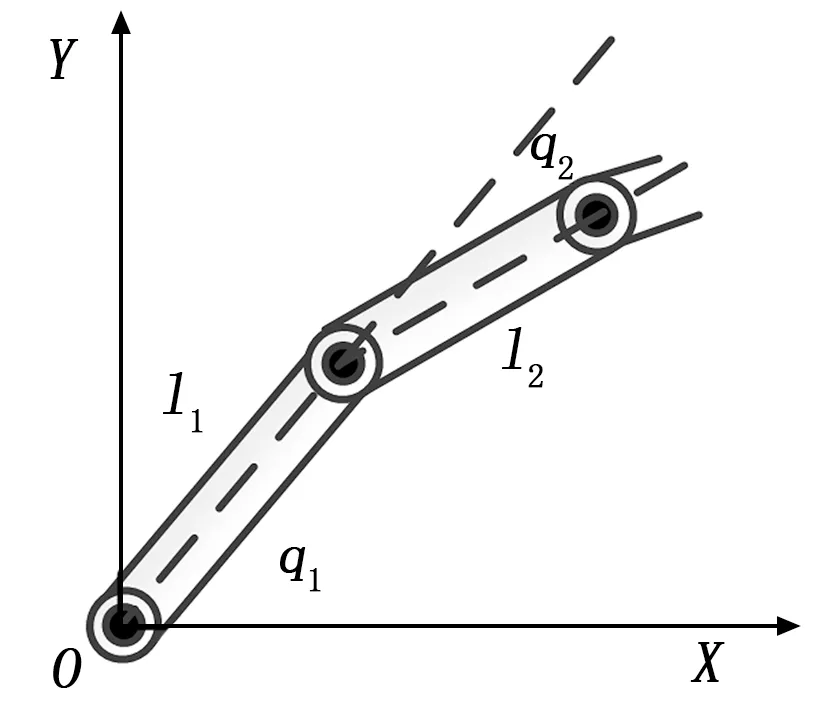
圖2 機(jī)械臂模型示意圖

圖4 基于擾動(dòng)觀測(cè)器的自適應(yīng)反演滑模控制
機(jī)械臂的參數(shù)選取:m1=1 kg,m2=2 kg,l1=1 m,l2=0.9 m,g=9.8。控制器參數(shù)選取:γ=5,β=1,c=diag(3,3),h=diag(1,1),k=diag(2,2).
系統(tǒng)不確定項(xiàng)F=[2sin(πt);3cos(πt)]。
利用Matlab軟件,分別對(duì)基本反演滑模控制器和本文提出的基于擾動(dòng)觀測(cè)器的自適應(yīng)滑模控制器進(jìn)行仿真實(shí)驗(yàn),結(jié)果如圖3~5所示。
圖3為基本反演滑模控制器的仿真結(jié)果。可以看出,機(jī)械臂兩個(gè)關(guān)節(jié)的位置及速度在1 s之后實(shí)現(xiàn)跟蹤;控制輸入包含較大的抖振。
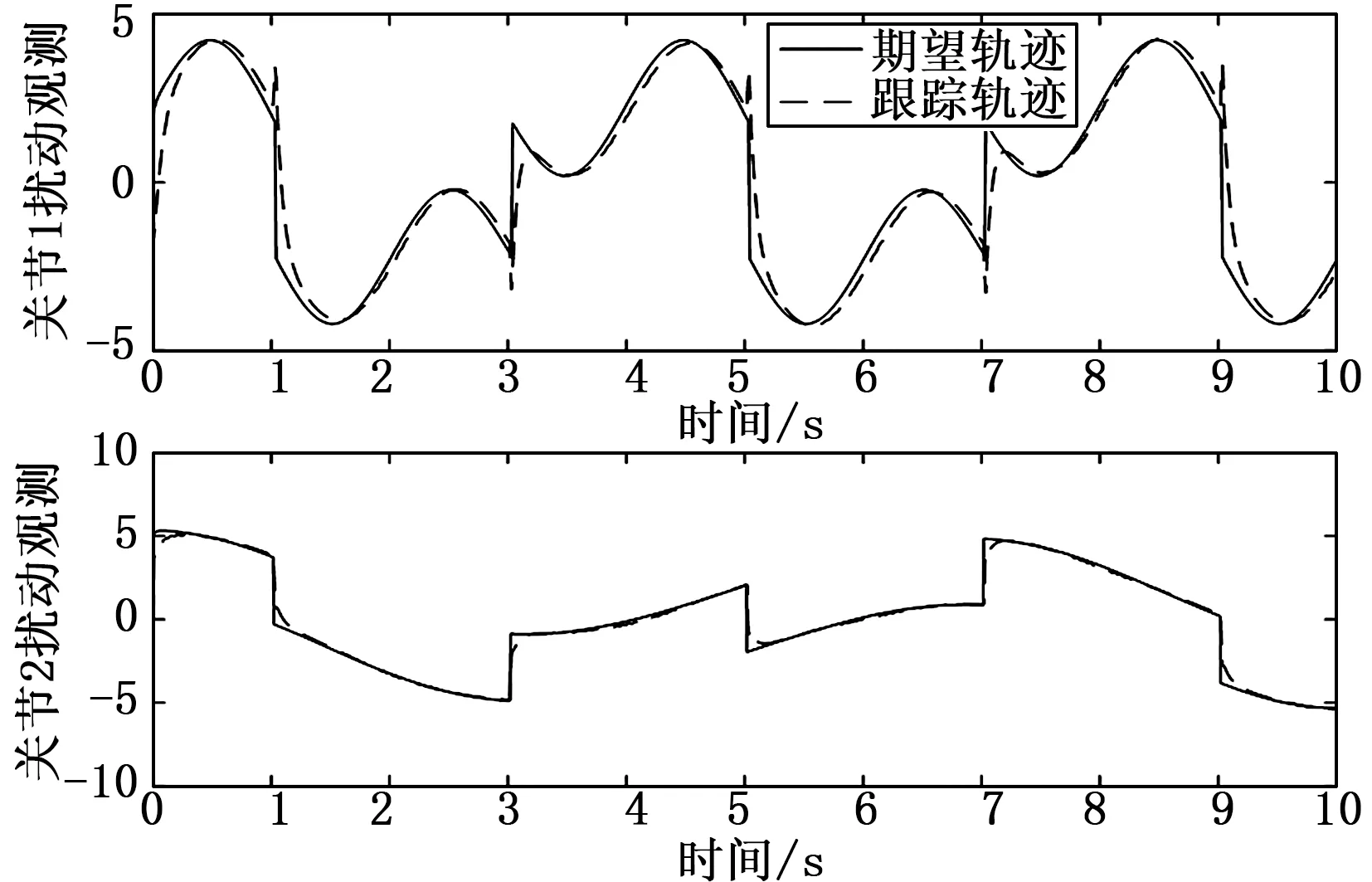
圖5 關(guān)節(jié)擾動(dòng)觀測(cè)結(jié)果
圖4~5為包含擾動(dòng)觀測(cè)器的自適應(yīng)反演滑模控制器的仿真結(jié)果。圖4顯示機(jī)械臂的兩關(guān)節(jié)均在0.5 s內(nèi)實(shí)現(xiàn)完全跟蹤,且跟蹤誤差基本為0;關(guān)節(jié)控制輸入穩(wěn)定。圖5關(guān)節(jié)擾動(dòng)觀測(cè)結(jié)果,表明所設(shè)計(jì)的非線性干擾觀測(cè)器對(duì)外加干擾觀測(cè)效果良好。
對(duì)比圖3和圖4可以看出,基本反演滑模控制器的關(guān)節(jié)位置跟蹤和關(guān)節(jié)速度跟蹤效果一般,跟蹤速度較慢,并且關(guān)節(jié)控制輸入存在較強(qiáng)的抖振現(xiàn)象;引入干擾觀測(cè)器和自適應(yīng)律的反演滑模控制器,關(guān)節(jié)位置跟蹤和速度跟蹤誤差均基本為零,跟蹤速度加快,效果改善明顯,且關(guān)節(jié)控制輸入的抖動(dòng)得到抑制。
4 結(jié)論
針對(duì)機(jī)械臂動(dòng)力學(xué)模型的特點(diǎn),分別考慮結(jié)構(gòu)參數(shù)的不確定性和外界未知干擾,提出了一種基于擾動(dòng)觀測(cè)器的自適應(yīng)反演滑模控制器。非線性擾動(dòng)觀測(cè)器對(duì)外界干擾進(jìn)行觀測(cè)補(bǔ)償,無(wú)需上界先驗(yàn)知識(shí);反演滑模控制保證了系統(tǒng)的穩(wěn)定性和魯棒性,自適應(yīng)律的引入進(jìn)一步提高了系統(tǒng)的動(dòng)態(tài)適應(yīng)性。對(duì)二連桿機(jī)械臂的跟蹤控制進(jìn)行仿真實(shí)驗(yàn),結(jié)果證明,和基本的反演滑模控制器相比,所提出的方法可以實(shí)現(xiàn)關(guān)節(jié)角度和速度的快速、準(zhǔn)確跟蹤,并且有效抑制控制輸入抖振,控制效果明顯改善。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
電腦報(bào)(2020年35期)2020-09-17 13:25:53
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
電腦報(bào)(2019年40期)2019-09-10 07:22:44
小溪流(畫(huà)刊)(2017年12期)2018-01-10 16:07:29
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
科技知識(shí)動(dòng)漫(2016年8期)2016-07-29 20:40:09
兒童故事畫(huà)報(bào)·發(fā)現(xiàn)號(hào)趣味百科(2015年12期)2016-01-25 00:41:49
