基于GPS和神經(jīng)網(wǎng)絡(luò)的滑坡位移監(jiān)測算法
2018-08-24 08:49:36,,,
計(jì)算機(jī)測量與控制 2018年8期
關(guān)鍵詞:分類
,,,
(1.山西大學(xué) 數(shù)學(xué)科學(xué)學(xué)院,太原 030006;2.中國鐵道科學(xué)研究院 電子計(jì)算技術(shù)研究所,北京 100081)
0 引言
我國各類地質(zhì)災(zāi)害頻發(fā),尤其是滑坡災(zāi)害影響最為嚴(yán)重,而鐵路沿線的滑坡更是危及旅客們的人身安全,因此,滑坡監(jiān)測預(yù)警越來越受到研究者的關(guān)注。文獻(xiàn)[1-2]對(duì)滑坡監(jiān)測技術(shù)方法現(xiàn)狀進(jìn)行了分析,按監(jiān)測對(duì)象的不同,滑坡監(jiān)測可分為4大類:即位移監(jiān)測、物理場監(jiān)測、地下水監(jiān)測和外部誘發(fā)因素監(jiān)測。這4大類監(jiān)測又可分為若干小類,每類監(jiān)測采取的方法手段不同,使用的儀器不同,獲取的參數(shù)也不同。本文研究的是滑坡位移監(jiān)測,采用低精度GPS接收機(jī)測得滑坡測點(diǎn)在不同時(shí)刻的經(jīng)緯度坐標(biāo)數(shù)據(jù),根據(jù)經(jīng)緯度坐標(biāo)之間的距離來判斷是否發(fā)生滑坡。因此,GPS定位問題是滑坡監(jiān)測中很關(guān)鍵的一個(gè)問題。
低精度GPS接收機(jī)單點(diǎn)定位精度在理想情況下一般能達(dá)到10米左右。GPS定位誤差主要有衛(wèi)星誤差、傳播誤差以及接受誤差。目前,差分GPS(DGPS)技術(shù)是減小定位誤差的較好方法,但此方法至少需要2臺(tái)GPS接收機(jī),基準(zhǔn)接收機(jī)需要通過DGPS數(shù)據(jù)鏈為動(dòng)態(tài)用戶提供差分改正數(shù),這在一定程度上限制了DGPS的使用范圍。許多學(xué)者研究了在不改變硬件設(shè)備的前提下通過對(duì)GPS誤差信號(hào)的建模來提高單點(diǎn)定位精度的方法。文獻(xiàn)[3-4]利用Kalman濾波算法對(duì)GPS定位數(shù)據(jù)進(jìn)行誤差處理分析,得到較小的估計(jì)誤差。文獻(xiàn)[5]研究了交互式多模型Kalman濾波(IMMKF)算法,使用2個(gè)模型來描述GPS在不同環(huán)境噪聲中可能的狀態(tài),通過有效的加權(quán)融合進(jìn)行系統(tǒng)狀態(tài)估計(jì),驗(yàn)證了變?cè)肼暷P偷腎MMKF能很好地適應(yīng)環(huán)境噪聲的變化。文獻(xiàn)[6-8]建立了適合GPS誤差一階差分序列的AR模型,并利用擴(kuò)展Kalman濾波算法對(duì)系統(tǒng)狀態(tài)進(jìn)行估計(jì),有效提高了定位精度。但是以上這些方法都假設(shè)GPS的觀測噪聲和過程噪聲為獨(dú)立不相關(guān)的高斯白噪聲,因此可以用Kalman濾波、AR等方法來去除噪聲,提高定位精度。而在實(shí)際中,觀測誤差服從的分布不是嚴(yán)格的高斯分布。因此,處理GPS定位誤差這一非線性非高斯問題是一個(gè)難點(diǎn)。文獻(xiàn)[9]研究了基于馬爾可夫鏈蒙特卡洛(MCMC)粒子濾波的GPS定位數(shù)據(jù)處理算法,避免了噪聲的高斯假設(shè)和非線性部分的線性化誤差。文獻(xiàn)[10]采用多個(gè)GPS接收機(jī)定位數(shù)據(jù)的平均,相比于單個(gè)GPS接收機(jī),提高了定位精度。上述這些方法考慮的是GPS單點(diǎn)靜態(tài)定位問題,而本文的主要目的是利用GPS定位數(shù)據(jù)進(jìn)行滑坡位移監(jiān)測,通過GPS接收機(jī)測得的經(jīng)緯度數(shù)據(jù)與GPS接收機(jī)實(shí)際位置經(jīng)緯度數(shù)據(jù)進(jìn)行比較,來判斷是否發(fā)生滑坡,即把GPS接收機(jī)測得的經(jīng)緯度數(shù)據(jù)分成兩類,判斷它是屬于未滑坡的一類還是發(fā)生滑坡的一類,這樣滑坡監(jiān)測問題轉(zhuǎn)化為一個(gè)對(duì)測量的GPS數(shù)據(jù)進(jìn)行二分類的問題。然而GPS接收機(jī)未移動(dòng)情況下和移動(dòng)之后測得的GPS數(shù)據(jù)耦合在一起,不是線性可分的,因此常規(guī)的線性分類器無法對(duì)GPS數(shù)據(jù)進(jìn)行有效的分類。
神經(jīng)網(wǎng)絡(luò)不需要對(duì)所解決問題進(jìn)行建模,單個(gè)神經(jīng)元有較簡單卻又反映非線性本質(zhì)特征的非線性核,通過這些基本的非線性核自組織復(fù)合,使得它具有從訓(xùn)練數(shù)據(jù)中學(xué)習(xí)任意復(fù)雜的非線性映射的能力,也包括實(shí)現(xiàn)復(fù)雜的非線性分類判別函數(shù)。使用神經(jīng)網(wǎng)絡(luò)方法避免了繁瑣的常規(guī)建模過程,且神經(jīng)網(wǎng)絡(luò)模型有良好的自適應(yīng)和自學(xué)習(xí)能力、較強(qiáng)的抗干擾能力,使得神經(jīng)網(wǎng)絡(luò)在模式識(shí)別的非線性分類器設(shè)計(jì)中應(yīng)用甚廣[11]。神經(jīng)網(wǎng)絡(luò)具有“黑盒子”的特點(diǎn),只要事先確定神經(jīng)網(wǎng)絡(luò)的網(wǎng)絡(luò)結(jié)構(gòu)、神經(jīng)元的傳遞函數(shù)和連接權(quán)值的學(xué)習(xí)算法,并不需要關(guān)心網(wǎng)絡(luò)最后實(shí)現(xiàn)的分類器的具體形式,能夠有效的解決非線性的分類問題。因此,本文將GPS定位和神經(jīng)網(wǎng)絡(luò)結(jié)合起來進(jìn)行滑坡位移監(jiān)測。
本文針對(duì)滑坡位移監(jiān)測中滑坡發(fā)生前后GPS定位數(shù)據(jù)不可分的問題,使用具有非線性可分特性的神經(jīng)網(wǎng)絡(luò),把耦合在一起的定位數(shù)據(jù)分成兩類。首先將GPS接收機(jī)測得的數(shù)據(jù)集分為訓(xùn)練集和測試集兩類,接著用訓(xùn)練集來訓(xùn)練神經(jīng)網(wǎng)絡(luò),最后用訓(xùn)練后的神經(jīng)網(wǎng)絡(luò)模型來驗(yàn)證測試集的分類效果,提出了一種基于GPS和神經(jīng)網(wǎng)絡(luò)的滑坡位移監(jiān)測算法。
1 GPS定位誤差采集
使用和芯星通UM220接收機(jī)連續(xù)采集接收機(jī)天線位置數(shù)據(jù)(loni,lati),i=1,…,n,假設(shè)天線實(shí)際位置為:


圖1 單點(diǎn)GPS定位誤差
圖1反映了當(dāng)GPS接收機(jī)不發(fā)生移動(dòng)時(shí),GPS接收機(jī)測得的位置數(shù)據(jù)與GPS接收機(jī)實(shí)際位置之間的距離誤差相對(duì)較大(例如,當(dāng)測得距離為4米時(shí),無法判斷是GPS接收機(jī)移動(dòng)導(dǎo)致的還是測得的距離誤差)。圖2是測得的兩個(gè)GPS接收機(jī)之間的相對(duì)定位誤差。
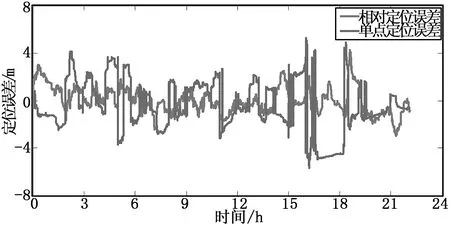
圖2 GPS定位誤差
兩個(gè)GPS接收機(jī)之間的相對(duì)定位消除了接收機(jī)共有的衛(wèi)星誤差和傳播誤差,所以與單點(diǎn)定位相比,相對(duì)定位的誤差減小,但只是略微減小,達(dá)不到期望的定位精度。因此,為了避免對(duì)GPS定位誤差進(jìn)行準(zhǔn)確的建模,不用把GPS接收機(jī)測得的經(jīng)緯度數(shù)據(jù)轉(zhuǎn)化為距離,而是考慮利用神經(jīng)網(wǎng)絡(luò)把GPS定位數(shù)據(jù)分成兩類,首先用GPS定位數(shù)據(jù)樣本訓(xùn)練神經(jīng)網(wǎng)絡(luò),再利用訓(xùn)練后的神經(jīng)網(wǎng)絡(luò)模型來判斷最新測得的GPS數(shù)據(jù)是屬于未滑坡的一類還是發(fā)生滑坡的一類。
2 基于GPS和神經(jīng)網(wǎng)絡(luò)的滑坡位移監(jiān)測算法
基于GPS和神經(jīng)網(wǎng)絡(luò)的滑坡位移監(jiān)測算法流程如圖3所示。首先將GPS接收機(jī)測得的數(shù)據(jù)集分為訓(xùn)練集和測試集兩類,然后分別對(duì)兩組數(shù)據(jù)集進(jìn)行歸一化處理,接著用訓(xùn)練集來訓(xùn)練神經(jīng)網(wǎng)絡(luò),最后用訓(xùn)練后的神經(jīng)網(wǎng)絡(luò)模型來驗(yàn)證測試集的分類效果[12]。

圖3 基于GPS和神經(jīng)網(wǎng)絡(luò)的滑坡位移監(jiān)測算法流程
2.1 神經(jīng)網(wǎng)絡(luò)的模型結(jié)構(gòu)
多層感知器神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)的是從m維輸入x到n維輸出y的一個(gè)映射。它由多個(gè)采用Sigmoid型傳遞函數(shù)的神經(jīng)元節(jié)點(diǎn)連接而成,這些神經(jīng)元節(jié)點(diǎn)分層排列,每一層的神經(jīng)元接受來自前一層的信號(hào),經(jīng)過加工后又傳遞給后一層。多層感知器神經(jīng)網(wǎng)絡(luò)的第一層是輸入層,每個(gè)節(jié)點(diǎn)對(duì)應(yīng)于x的每一維,節(jié)點(diǎn)本身并不完成任何處理,只是把每一維的信號(hào)“分發(fā)”到后一層的每個(gè)節(jié)點(diǎn)。最后一層是輸出層,如果y是一維,則輸出層只有一個(gè)節(jié)點(diǎn)。在輸入層和輸出層之間的各層都被稱作“隱含層”。這種神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)的是從輸入層到輸出層的映射,把一個(gè)樣本特征向量的各分量分別輸入到網(wǎng)絡(luò)輸入層的各個(gè)對(duì)應(yīng)節(jié)點(diǎn)上,經(jīng)過在網(wǎng)絡(luò)上從前向后一系列加工運(yùn)算,在輸出端得到相應(yīng)的輸出值(或輸出向量)。相關(guān)研究證明,任意一個(gè)從x到y(tǒng)的非線性映射,都存在一個(gè)適當(dāng)結(jié)構(gòu)的三層前饋神經(jīng)網(wǎng)絡(luò)能夠以任意的精度來逼近它。所以本文考慮帶有一個(gè)隱含層的多層感知器神經(jīng)網(wǎng)絡(luò)作為分類器。

本文采用如圖4所示的網(wǎng)絡(luò)結(jié)構(gòu)形式,包括經(jīng)度數(shù)據(jù)和緯度數(shù)據(jù)組成的2維矢量的輸入層;具有Sigmoid型傳遞函數(shù)、8個(gè)神經(jīng)元組成的一個(gè)隱含層;以及1個(gè)神經(jīng)元組成的線性輸出層。

圖4 多層感知器神經(jīng)網(wǎng)絡(luò)的模型結(jié)構(gòu)
2.2 神經(jīng)網(wǎng)絡(luò)的學(xué)習(xí)算法
多層感知器神經(jīng)網(wǎng)絡(luò)采用反向傳播(BP)算法訓(xùn)練其網(wǎng)絡(luò)權(quán)值,其核心思想是梯度下降法,即以訓(xùn)練樣本被錯(cuò)分的程度為目標(biāo)函數(shù),訓(xùn)練中每次出現(xiàn)錯(cuò)誤時(shí)便使權(quán)系數(shù)朝著目標(biāo)函數(shù)相對(duì)于權(quán)系數(shù)的負(fù)梯度方向更新,直到目標(biāo)函數(shù)取得極小值,即沒有訓(xùn)練樣本被錯(cuò)分。
針對(duì)本文所采用的多層感知器神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu),對(duì)圖4神經(jīng)網(wǎng)絡(luò)的各個(gè)變量約定如下:

BP算法的具體步驟如下:
1)用小隨機(jī)數(shù)進(jìn)行權(quán)值初始化,設(shè)訓(xùn)練時(shí)間t=0。
2)從訓(xùn)練集中得到一個(gè)訓(xùn)練樣本x=[x1,x2]T∈R2,記它的期望輸出是d∈R。
3)計(jì)算在x輸入下當(dāng)前神經(jīng)網(wǎng)絡(luò)的實(shí)際輸出
(1)
其中:f(·)是Sigmoid函數(shù)
(2)
4)從輸出層開始調(diào)整權(quán)值,做法是:
對(duì)第l層,用下面的公式修正權(quán)值
(3)
(4)
η是學(xué)習(xí)步長。

(5)

(6)
5)在更新全部權(quán)值后對(duì)所有訓(xùn)練樣本重新計(jì)算輸出,計(jì)算更新后的網(wǎng)絡(luò)輸出與期望輸出的總誤差。檢查算法終止條件,若滿足條件,則算法結(jié)束,否則置t=t+1,返回步驟(2)。具體流程如圖5所示。

圖5 BP神經(jīng)網(wǎng)絡(luò)流程圖
3 實(shí)驗(yàn)分析
為了驗(yàn)證BP神經(jīng)網(wǎng)絡(luò)對(duì)GPS接收機(jī)測得的位置數(shù)據(jù)的分類性能,采用兩個(gè)GPS接收機(jī)來模擬滑坡發(fā)生前后GPS接收機(jī)的位置,通過改變兩個(gè)接收機(jī)之間的距離來模擬滑坡程度。圖6顯示了相距5米的兩個(gè)GPS接收機(jī)隨時(shí)間變化的位置圖。圖7顯示了兩個(gè)GPS接收機(jī)平面位置的散點(diǎn)圖。

圖6 兩個(gè)GPS接收機(jī)隨時(shí)間變化的位置圖
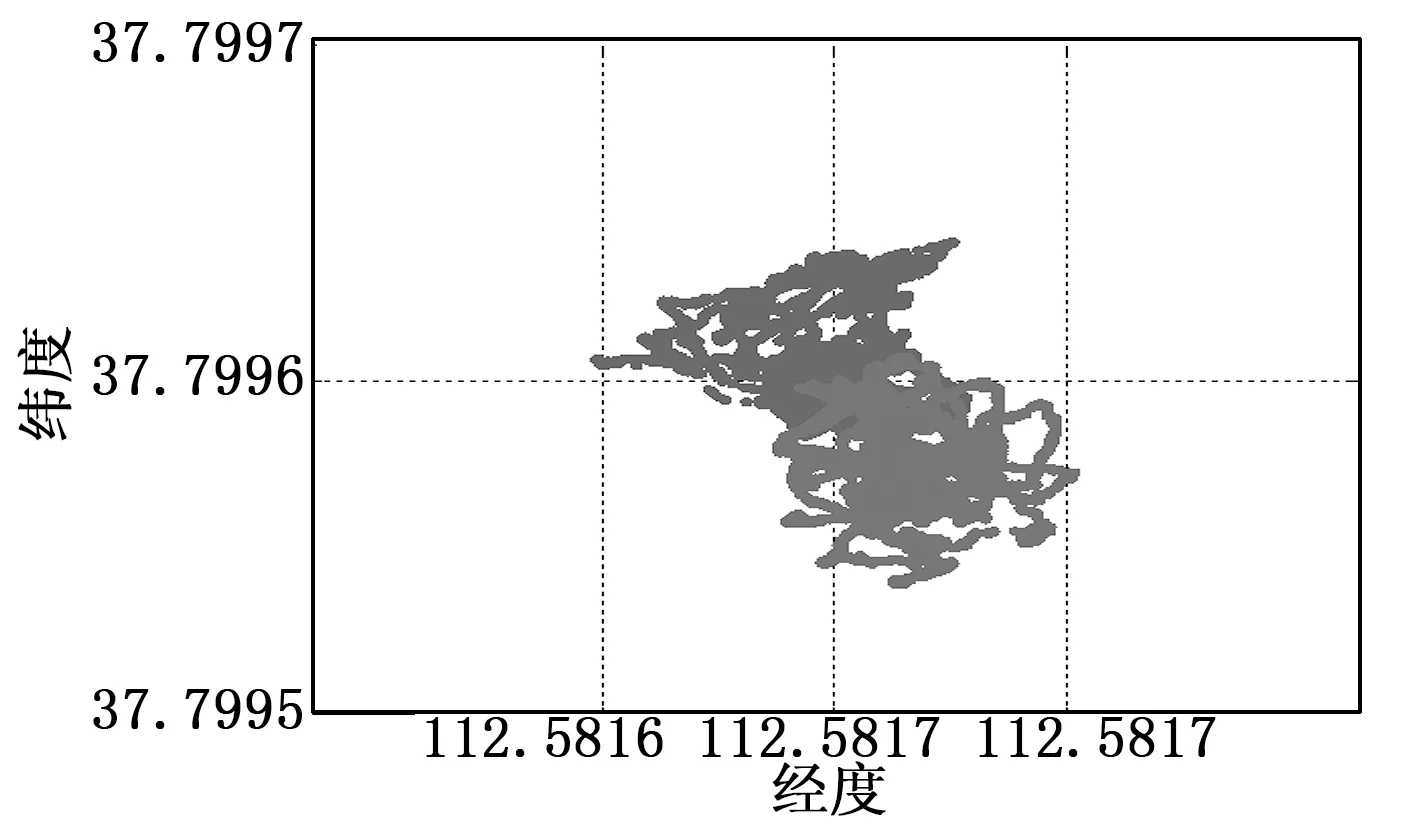
圖7 兩個(gè)GPS接收機(jī)平面位置圖
從圖6中可以看出GPS接收機(jī)測得的位置數(shù)據(jù)是圍繞其真實(shí)位置連續(xù)變化的,而從圖7中可以看出相距5米的兩個(gè)GPS接收機(jī),它們測得的GPS位置數(shù)據(jù)之間有重合,對(duì)于這些重合的數(shù)據(jù),很難判斷它們是屬于哪個(gè)GPS接收機(jī),即在滑坡監(jiān)測過程中,對(duì)于較小程度的滑坡,很難通過GPS接收機(jī)測得的位置數(shù)據(jù)判斷是否發(fā)生滑坡。
圖7中兩個(gè)GPS接收機(jī)測得的的二維位置數(shù)據(jù)是線性不可分的,但從圖6中可看出在高維空間,兩組數(shù)據(jù)可通過一個(gè)超平面實(shí)現(xiàn)分類,所以本文采用BP神經(jīng)網(wǎng)絡(luò)來對(duì)兩組數(shù)據(jù)進(jìn)行非線性分類。選取GPS接收機(jī)連續(xù)觀測48小時(shí)的數(shù)據(jù)作為樣本集,其中前24小時(shí)的數(shù)據(jù)作為訓(xùn)練集,后24小時(shí)的數(shù)據(jù)作為測試集。表1給出了GPS接收機(jī)不同距離之間數(shù)據(jù)的分類效果。

表1 GPS接收機(jī)不同距離之間樣本分類正確率的比較
表1中的結(jié)果是對(duì)每種情況進(jìn)行10次實(shí)驗(yàn)之后平均得到的,從表1中可看出當(dāng)GPS接收機(jī)相距8米時(shí),訓(xùn)練樣本分類正確率是99.99%,測試樣本分類正確率是91.05%。即可以認(rèn)為當(dāng)滑坡程度達(dá)到8米時(shí),GPS接收機(jī)監(jiān)測出滑坡的概率是91.05%。隨著GPS接收機(jī)之間的距離不斷減小,訓(xùn)練樣本分類正確率和測試樣本分類正確率都隨之降低。當(dāng)GPS接受機(jī)之間距離減小至1米時(shí),訓(xùn)練樣本正確分類率是84.68%,而測試樣本分類正確率只有61.17%,即當(dāng)滑坡程度是1米時(shí),GPS接收機(jī)監(jiān)測出滑坡的概率只有61.17%。這種情況主要是因?yàn)榈途菺PS接收機(jī)本身的測量精度較低,如果使用較高測量精度的GPS接收機(jī),則滑坡位移監(jiān)測精度會(huì)更高。
4 結(jié)束語
本文提出了一種基于GPS和神經(jīng)網(wǎng)絡(luò)的滑坡位移監(jiān)測算法,來解決使用GPS接收機(jī)進(jìn)行滑坡位移監(jiān)測時(shí),由于單點(diǎn)GPS定位誤差較大導(dǎo)致滑坡發(fā)生前后GPS定位數(shù)據(jù)不可分的問題。利用BP神經(jīng)網(wǎng)絡(luò)非線性可分的特性,將耦合在一起的GPS定位數(shù)據(jù)分成兩類,避免了對(duì)GPS定位誤差的常規(guī)建模過程。最后實(shí)驗(yàn)結(jié)果表明,對(duì)于低精度的GPS接收機(jī),當(dāng)滑坡程度達(dá)到8米時(shí),測試樣本分類正確率為91.05%,驗(yàn)證了算法的有效性。但是隨著滑坡程度逐漸減小,測試樣本分類正確率也隨之降低,這說明本文所研究的算法也是依賴GPS接收機(jī)測量精度的,如何減小這依賴程度,還有待進(jìn)一步研究。
猜你喜歡
西北民族大學(xué)學(xué)報(bào)(自然科學(xué)版)(2021年4期)2021-12-29 02:54:24
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
小聰仔(科普版)(2020年12期)2021-01-18 09:16:52
東方少年·布老虎畫刊(2020年4期)2020-06-08 15:48:10
學(xué)生天地(2019年32期)2019-08-25 08:55:22
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年4期)2019-05-20 10:06:32
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:06
小天使·一年級(jí)語數(shù)英綜合(2017年11期)2017-12-05 18:49:56
初中生世界·七年級(jí)(2017年9期)2017-10-13 22:27:46
