基于姿態(tài)隨動(dòng)技術(shù)的直升機(jī)低高度測(cè)量
2018-08-24 07:49:30谷士
計(jì)算機(jī)測(cè)量與控制 2018年8期
, ,谷士
(中國(guó)飛行試驗(yàn)研究院,西安 710089)
0 引言
離地高度是直升機(jī)懸停科目試飛與小速度科目試飛中的關(guān)鍵參數(shù)。直升機(jī)的高度信息通常由氣壓式高度傳感器和無(wú)線電高度表獲取。由于直升機(jī)地面效應(yīng),使得氣壓式高度測(cè)量的測(cè)量誤差會(huì)因高度的降低而增大[1]。加速度計(jì)能反映高度方向的速度變化,短時(shí)間內(nèi)通過(guò)對(duì)加速度兩次積分可得到高度信息,但長(zhǎng)時(shí)間誤差會(huì)積累。無(wú)線電高度測(cè)量主要用于直升機(jī)低高度時(shí)的高度信息測(cè)量。由于其自身的原因,易受周圍電磁環(huán)境和飛機(jī)姿態(tài)、風(fēng)速、風(fēng)向等諸多因此的干擾,從而無(wú)法進(jìn)一步提高精度和可靠性[2]。因此,直升機(jī)低高度精準(zhǔn)測(cè)量是一個(gè)困擾直升機(jī)試飛研究的技術(shù)難題。
隨著激光技術(shù)的發(fā)展,激光測(cè)距逐漸成為一種先進(jìn)的測(cè)量手段,并開(kāi)始應(yīng)用于直升機(jī)低高度測(cè)量中。但是在具體實(shí)施過(guò)程中由于直升機(jī)機(jī)動(dòng)中飛行姿態(tài)變化劇烈,經(jīng)常導(dǎo)致激光接收裝置無(wú)法接收到反射回來(lái)的激光信號(hào)而導(dǎo)致數(shù)據(jù)失效。通過(guò)機(jī)載姿態(tài)跟隨技術(shù)研究,可以克服克服直升機(jī)機(jī)動(dòng)狀態(tài)下姿態(tài)變化引起的激光測(cè)量誤差與失效,而且可由機(jī)載綜合采集系統(tǒng)將低高度數(shù)據(jù)融合,實(shí)現(xiàn)低高度數(shù)據(jù)的遙測(cè)接收、存儲(chǔ)和監(jiān)控[3]。從而實(shí)現(xiàn)在每一科研架次中的起飛和降落的時(shí)候完成若干高度的懸停飛行,可以極大擴(kuò)充數(shù)據(jù)樣本,從而獲取比較準(zhǔn)確的試驗(yàn)結(jié)論。
1 低高度測(cè)量的特點(diǎn)與關(guān)鍵技術(shù)指標(biāo)
直升機(jī)激光測(cè)高是一種激光測(cè)距技術(shù),是指利用機(jī)載的激光測(cè)高儀對(duì)地面目標(biāo)進(jìn)行高度測(cè)量,高度數(shù)據(jù)結(jié)合載體的姿態(tài)信息(由慣性測(cè)量系統(tǒng)IMU 獲取),經(jīng)事后地面數(shù)據(jù)處理后可以得到較為準(zhǔn)確的低高度數(shù)據(jù)[4]。因此直升機(jī)激光測(cè)高已在國(guó)內(nèi)外的飛行試驗(yàn)中得到了廣泛的應(yīng)用[5]。
通常激光測(cè)高裝置一般采用固定安裝底座,在激光測(cè)高工作狀態(tài)下受直升機(jī)姿態(tài)的限制,當(dāng)直升機(jī)的俯仰角和橫滾角超過(guò)5o時(shí)激光接收器因無(wú)法接收到激光反射信號(hào)而報(bào)故障,影響了激光測(cè)高的有效性和精度。隨著直升機(jī)懸停性能和小速度機(jī)動(dòng)飛行試飛科目的重要性日益受到重視,常用的激光測(cè)高裝置已不能滿足日益增長(zhǎng)的試飛測(cè)試需求[6]。
研究姿態(tài)跟隨激光測(cè)高技術(shù),通過(guò)隨動(dòng)控制算法實(shí)時(shí)調(diào)整激光測(cè)距儀發(fā)射器和接收器的對(duì)地角度,確保激光裝置始終鉛垂向地,消除直升機(jī)姿態(tài)限制,從而實(shí)現(xiàn)直升機(jī)機(jī)動(dòng)試飛情況下低高度的高精度測(cè)量。
主要技術(shù)指標(biāo):
1)姿態(tài)跟蹤范圍:
橫滾角-30~30°;
俯仰角-30~30°。
2)姿態(tài)跟蹤精度:
橫滾角 <1.5°;
俯仰角 <1.5°。
3)跟蹤速度與角加速度范圍:
X軸向,橫滾,最大轉(zhuǎn)速15°/s,最大加速度30°/s2;
Y軸向,俯仰,最大轉(zhuǎn)速15°/s,最大加速度30°/s2。
4)測(cè)高范圍:0.5~300 m;
測(cè)量精度:<2 cm;
響應(yīng)速度:≯0.2 s。
2 基于姿態(tài)隨動(dòng)的低高度測(cè)量系統(tǒng)設(shè)計(jì)
2.1 設(shè)計(jì)原則
依據(jù)直升機(jī)低高度測(cè)試要求,充分考慮直升機(jī)試飛特點(diǎn)前提下設(shè)計(jì)滿足試飛需求的測(cè)試方案。該設(shè)計(jì)方案是基于增加相對(duì)飛機(jī)載體的姿態(tài)隨動(dòng)系統(tǒng)平臺(tái),通過(guò)隨動(dòng)電機(jī)使激光發(fā)射器和接收器的安裝平臺(tái)可跟隨直升機(jī)姿態(tài)進(jìn)行實(shí)時(shí)調(diào)整,確保激光裝置始終鉛垂向地,從而實(shí)現(xiàn)直升機(jī)機(jī)動(dòng)試飛狀態(tài)下低高度的高精度測(cè)量。
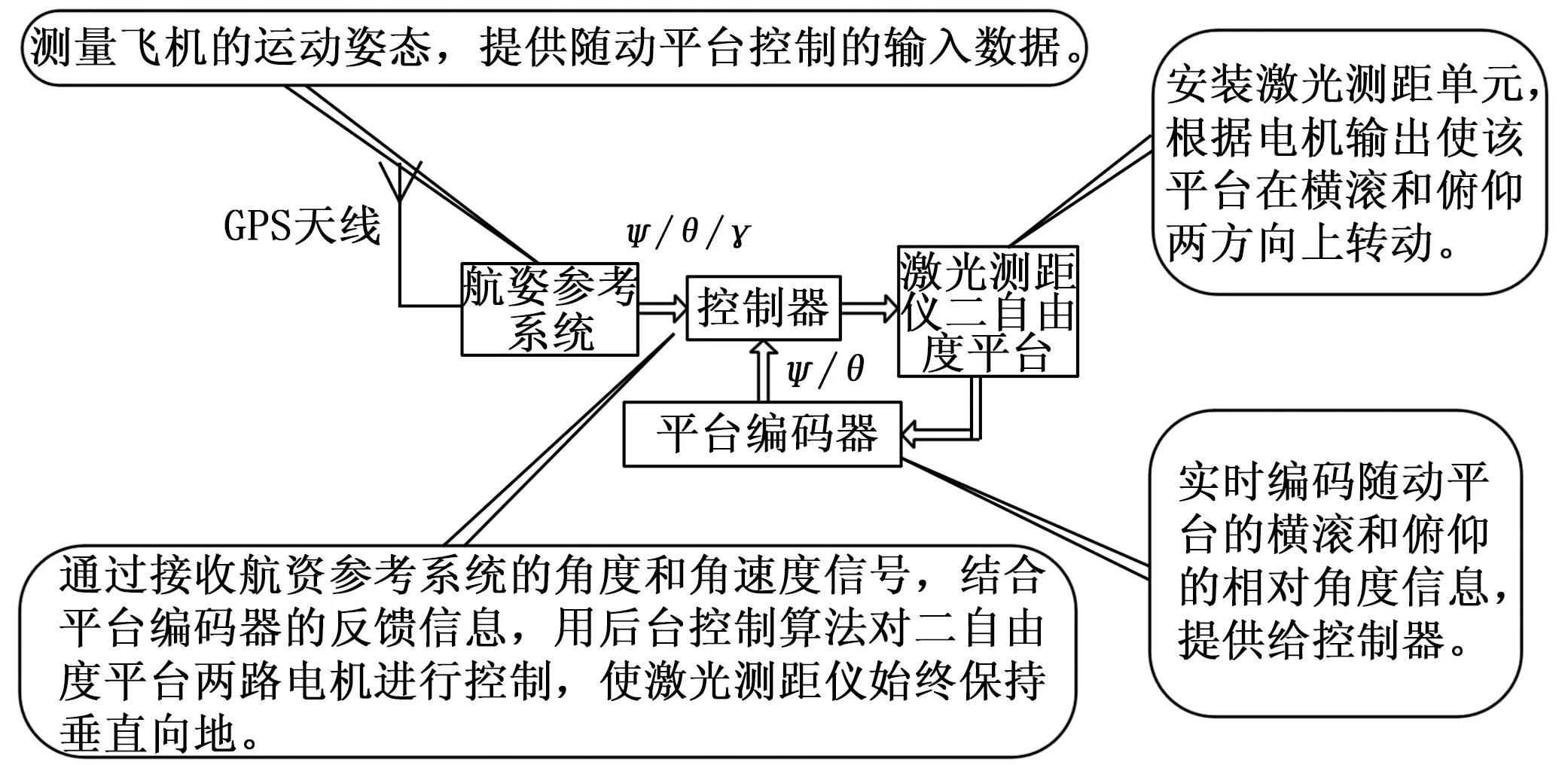
圖1 姿態(tài)隨動(dòng)激光測(cè)高系統(tǒng)結(jié)構(gòu)框圖
各系統(tǒng)組成部分功能如下:
1)航姿參考系統(tǒng):用于測(cè)量飛機(jī)的運(yùn)動(dòng)姿態(tài),提供隨動(dòng)平臺(tái)控制的輸入數(shù)據(jù)。可抽引機(jī)載陀螺信號(hào)(橫滾角和俯仰角)或加裝IMU作為航姿參考系統(tǒng)。
2)控制器:通過(guò)接收航姿參考系統(tǒng)的角度和角速度信號(hào),結(jié)合平臺(tái)編碼器的反饋信息,利用PID算法對(duì)二自由度平臺(tái)兩路電機(jī)進(jìn)行控制,使激光測(cè)距儀始終保持垂直向地。
3)二自由度隨動(dòng)平臺(tái):用于安裝激光測(cè)距單元,可利用電機(jī)使該平臺(tái)在橫滾和俯仰兩方向上轉(zhuǎn)動(dòng),調(diào)整其對(duì)地指向。
4)平臺(tái)編碼器:實(shí)時(shí)測(cè)量出隨動(dòng)平臺(tái)的橫滾和俯仰的相對(duì)角度信息,提供給控制器。
2.2 直升機(jī)姿態(tài)跟隨控制算法研究
姿態(tài)輸出信號(hào)作為基準(zhǔn)輸入中央控制器,由控制器解析出俯仰角及橫滾角信號(hào),然后將所需的運(yùn)動(dòng)量分別送達(dá)兩軸電機(jī)的驅(qū)動(dòng)電路,驅(qū)動(dòng)電機(jī)工作,從而帶動(dòng)二自由度平臺(tái)達(dá)到鉛垂向地的狀態(tài)[7]。二自由度平臺(tái)的每個(gè)運(yùn)動(dòng)軸向上分別裝有絕對(duì)值編碼器,可反映平臺(tái)的實(shí)時(shí)運(yùn)動(dòng)狀態(tài),為控制器提供負(fù)反饋,修正控制角度。在二自由度平臺(tái)達(dá)到預(yù)定測(cè)量位置后,控制器讀取激光測(cè)距儀的測(cè)量信號(hào),并將該數(shù)據(jù)以RS422總線形式輸出。控制系統(tǒng)的結(jié)構(gòu)框圖如圖2所示。
當(dāng)然,這僅是新媒體平臺(tái)的傳播內(nèi)容之一,大量精心錄制的與會(huì)員單位相關(guān)的公益性、商業(yè)性宣傳短片,也是日常傳播的重要內(nèi)容。在一個(gè)制作間里,我們觀看了其近期錄制、已在電視臺(tái)播放的一部短片:上海印刷2017,該片通過(guò)形象的畫面、簡(jiǎn)練的語(yǔ)言、豐富的信息,生動(dòng)總結(jié)了2017年上海印刷業(yè)新成就、新變化、新挑戰(zhàn),幫助從業(yè)者有效掌握信息,把握行業(yè)發(fā)展方向;也幫助更多的業(yè)外人士建立起對(duì)印刷的整體印象。很多時(shí)候,誤解都是不了解或不充分所致。

圖2 控制系統(tǒng)框圖
控制系統(tǒng)工作時(shí)對(duì)接收到來(lái)自IMU的RS232信號(hào)進(jìn)行解析,得到飛行姿態(tài)信息,然后生成運(yùn)動(dòng)平臺(tái)轉(zhuǎn)動(dòng)所需的信息來(lái)控制運(yùn)動(dòng)平臺(tái)與飛機(jī)的飛行姿態(tài)保持相反的運(yùn)動(dòng),使得激光測(cè)高儀發(fā)出的測(cè)量激光始終保持與地面垂直來(lái)實(shí)現(xiàn)高度的精確測(cè)量。最終將測(cè)量到的高度信息將以RS422信號(hào)形式通過(guò)FTI信號(hào)接口傳遞給機(jī)上測(cè)量記錄系統(tǒng)[8]。
伺服系統(tǒng)可由直流電機(jī)、控制器、減速器及位置編碼器組成(見(jiàn)圖3),滾轉(zhuǎn)和俯仰采取一樣的結(jié)構(gòu)。對(duì)于滾轉(zhuǎn)和俯仰軸穩(wěn)定能力的技術(shù)要求一致,考慮到俯仰為外回路,轉(zhuǎn)動(dòng)慣量等變量遠(yuǎn)大于滾轉(zhuǎn)的內(nèi)回路,系統(tǒng)按俯仰通道的最大需求進(jìn)行選擇。
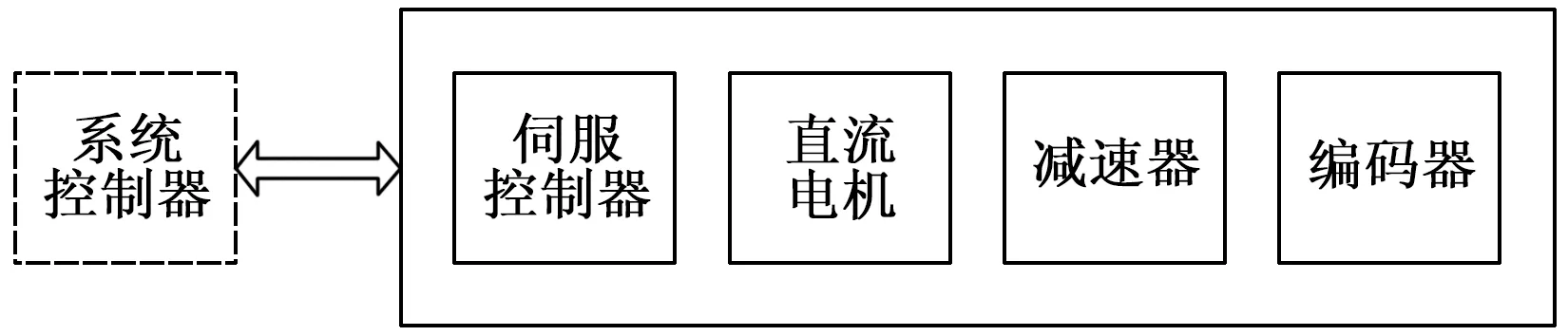
圖3 伺服系統(tǒng)結(jié)構(gòu)框圖
伺服電機(jī)安裝有位置和速度傳感器,姿態(tài)伺服系統(tǒng)的仿真結(jié)構(gòu)如圖4所示。本項(xiàng)目采用姿態(tài)+測(cè)速反饋方式,數(shù)字舵機(jī)(含減速機(jī)構(gòu))及測(cè)速反饋相對(duì)固定,通過(guò)選擇合適的KP、KI、KD增益,保證直升機(jī)機(jī)載激光高度測(cè)量的良好跟蹤性能。姿態(tài)跟蹤系統(tǒng)響應(yīng)從零開(kāi)始到達(dá)穩(wěn)態(tài)的時(shí)間約為0.24 s,無(wú)靜態(tài)誤差。系統(tǒng)具有較高的響應(yīng)速度,具有遠(yuǎn)大于跟蹤15°/s角速率變化的能力,從研究上能夠滿足1.5°跟蹤精度和5 s穩(wěn)定時(shí)間的要求[9]。
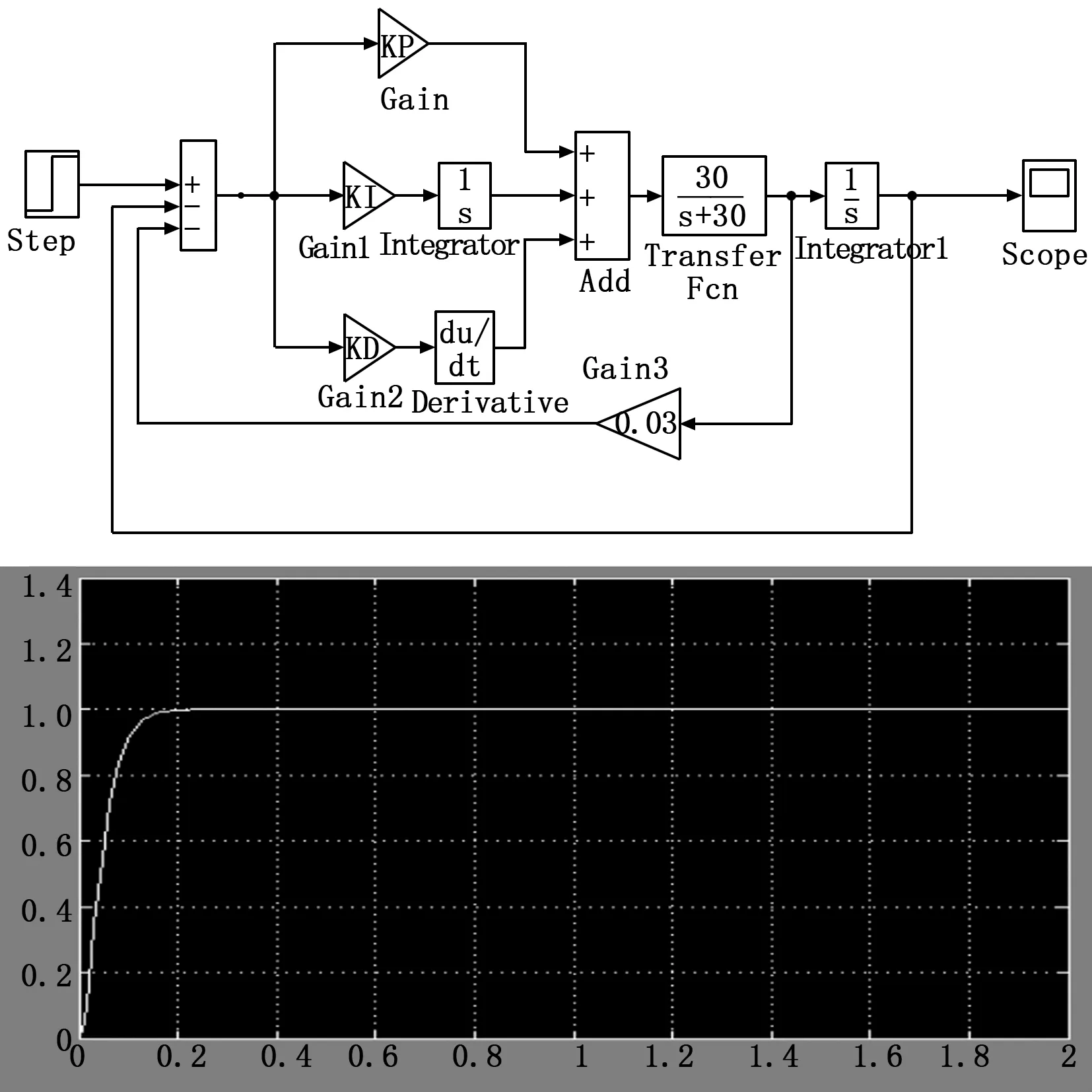
圖4 姿態(tài)伺服系統(tǒng)仿真結(jié)構(gòu)圖與單位階躍響應(yīng)
2.3 姿態(tài)隨動(dòng)運(yùn)動(dòng)平臺(tái)結(jié)構(gòu)研究
運(yùn)動(dòng)平臺(tái)用于安裝激光測(cè)距單元,為了抵消直升機(jī)姿態(tài)變化對(duì)平臺(tái)的影響,平臺(tái)應(yīng)在橫滾和俯仰兩個(gè)軸向上分別轉(zhuǎn)動(dòng)。建立平臺(tái)的坐標(biāo)系時(shí)應(yīng)與飛機(jī)的坐標(biāo)系保持一致,俯仰軸應(yīng)平行于機(jī)軸方向,橫滾軸應(yīng)在水平面內(nèi)與俯仰軸保持垂直[10]。姿態(tài)跟蹤范圍為橫滾-30~+30°、俯仰-30~+30°。
兩方向隨動(dòng)平臺(tái)的運(yùn)動(dòng)機(jī)構(gòu)及轉(zhuǎn)動(dòng)時(shí)對(duì)空間的要求決定其無(wú)法直接在直升機(jī)上安裝,為此研究專用安裝支架。通過(guò)加裝航姿參考系統(tǒng)作為輔助數(shù)據(jù),可減輕轉(zhuǎn)動(dòng)平臺(tái)重量[11]。平臺(tái)分為橫滾臺(tái)和俯仰臺(tái),每個(gè)軸向分別通過(guò)一個(gè)步進(jìn)電機(jī)及其配套的減速裝置控制,轉(zhuǎn)動(dòng)軸上安裝絕對(duì)值光電編碼器[12]。采用框架嵌套結(jié)構(gòu),外層框架可在橫滾方向上轉(zhuǎn)動(dòng),為兩個(gè)電機(jī)、減速機(jī)構(gòu)及控制電路提供了安裝空間,內(nèi)層平臺(tái)安裝在外層框架的中軸線上,可獨(dú)立在俯仰方向上轉(zhuǎn)動(dòng),為激光測(cè)距單元提供安裝空間[13]。運(yùn)動(dòng)平臺(tái)結(jié)構(gòu)原理圖見(jiàn)圖5。

圖5 二自由度運(yùn)動(dòng)平臺(tái)結(jié)構(gòu)圖
隨動(dòng)控制系統(tǒng)又名伺服驅(qū)動(dòng)系統(tǒng),是一種以機(jī)械位置或角度作為控制對(duì)象的自動(dòng)控制系統(tǒng),使用的驅(qū)動(dòng)電機(jī)具有響應(yīng)速度快、定位準(zhǔn)確、轉(zhuǎn)動(dòng)慣量較大等特點(diǎn)。步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)換成相應(yīng)的角位移或線位移的控制電動(dòng)機(jī)。基于步進(jìn)電機(jī)的位置隨動(dòng)系統(tǒng)可以很好地實(shí)現(xiàn)全方位監(jiān)控的目的。
2.3.1 橫滾和俯仰平臺(tái)驅(qū)動(dòng)
橫滾軸平臺(tái)所需要的驅(qū)動(dòng)力矩為:
T=T0+T1+Tk
(3)
式中,T0為慣性力矩;T1為靜力矩;Tk為摩擦力矩。
模型中,激光測(cè)距單元選用LDM301,136×57×104 mm(L×W×H),其重量為0.8 kg,平臺(tái)采用鋁板,連接采用法蘭連接,總質(zhì)量約為1.429 kg,在俯仰方向上的轉(zhuǎn)動(dòng)慣量為2.9×10-3kg·m2。考慮到裝配中使用緊固件,橫滾軸平臺(tái)質(zhì)量取1.5 kg,轉(zhuǎn)動(dòng)慣量取3.0×10-3kg·m2[14]。橫滾向的最大角加速度為30°/s2。
橫滾軸平臺(tái)所需要的驅(qū)動(dòng)力矩為T=T0+T1+TK≈0.775 N*m
在2倍裕量的情況下[15],橫滾驅(qū)動(dòng)機(jī)構(gòu)的扭矩需2.27 N*m。
同理,俯仰平臺(tái)的驅(qū)動(dòng)力矩為T=T0+T1+TK≈1.07 N*m
在2倍裕量的情況下,俯仰驅(qū)動(dòng)系統(tǒng)的扭矩需3.04 N*m。
因此使用最大扭矩為10 N*m的電機(jī)將能夠滿足需求。
平臺(tái)系統(tǒng)模型如圖6、圖7所示。

圖6 橫滾和俯仰平臺(tái)建模
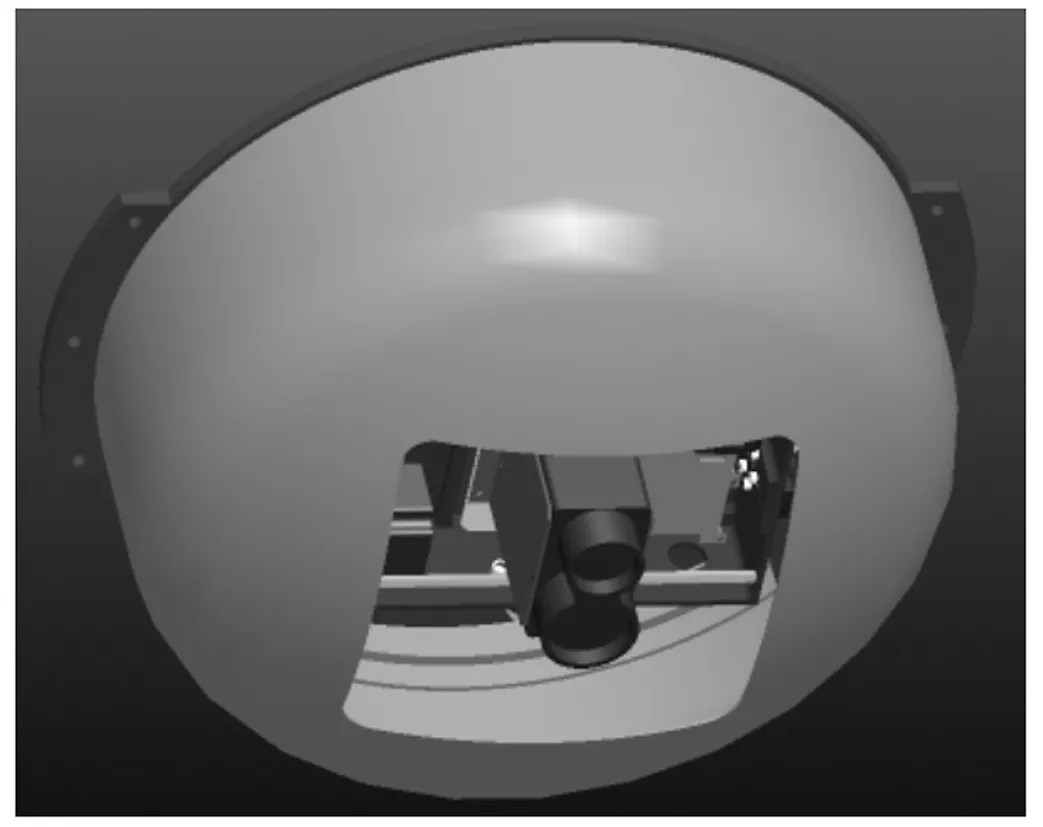
圖7 系統(tǒng)數(shù)模圖
2.3.2 控制程序流程研究
首先完成各端口的初始化,包括接收姿態(tài)信息的IMU端口(RS232,19200,n,8,1)、發(fā)送給機(jī)載測(cè)試系統(tǒng)的FTI端口(RS422,19200,n,8,1)、接收激光測(cè)距數(shù)據(jù)的LDM端口(RS422,19200,n,8,1)、與滾轉(zhuǎn)和俯仰伺服舵機(jī)的ACT端口(RS485,19200,n,8,1)初始化。正常后則進(jìn)入由基準(zhǔn)定時(shí)中斷控制的任務(wù)循環(huán)流程,根據(jù)姿態(tài)信息驅(qū)動(dòng)舵機(jī)進(jìn)行姿態(tài)穩(wěn)定(跟蹤),同時(shí)把測(cè)高信息、跟蹤姿態(tài)及狀態(tài)信息發(fā)送給機(jī)載測(cè)試系統(tǒng)[16]。
系統(tǒng)主程序流程,基準(zhǔn)定時(shí)中斷服務(wù)子程序,串口中斷服務(wù)子程序見(jiàn)圖8。
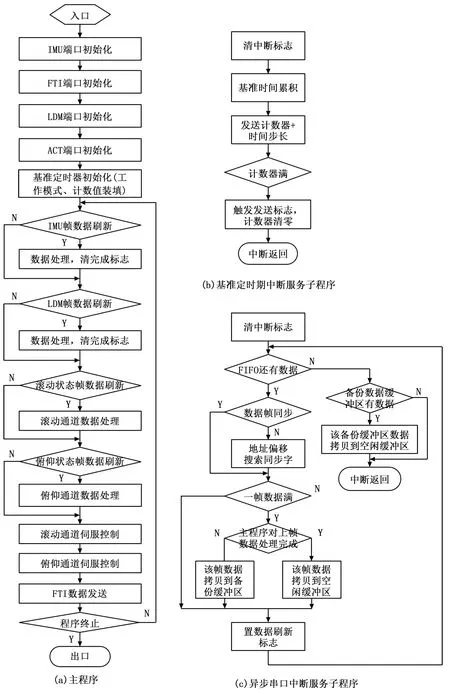
圖8 控制程序流程
3 實(shí)驗(yàn)與驗(yàn)證
項(xiàng)目設(shè)計(jì)完成進(jìn)行直升機(jī)姿態(tài)跟隨激光高度測(cè)量技術(shù)和飛機(jī)姿態(tài)隨動(dòng)控制算法的驗(yàn)證,為激光測(cè)距系統(tǒng)研制工作提供技術(shù)依據(jù)。包括:隨動(dòng)系統(tǒng)的響應(yīng)速度驗(yàn)證、測(cè)試精度以及IMU修正設(shè)備安裝誤差算法等。因?yàn)榭刂坡实捻憫?yīng)仿真結(jié)果、測(cè)試結(jié)果的理論精度都只是理論計(jì)算的值,必須通過(guò)實(shí)際的地面驗(yàn)證工作來(lái)驗(yàn)證仿真結(jié)果的真確性。同時(shí),驗(yàn)證誤差補(bǔ)償算法的正確性[17]。
上位機(jī)使用一臺(tái)PC,完成載機(jī)姿態(tài)信息的模擬和發(fā)送,同時(shí)接收實(shí)驗(yàn)臺(tái)返回的測(cè)試信息,通過(guò)曲線和文本方式顯示,并記錄相關(guān)數(shù)據(jù),便于試驗(yàn)的實(shí)時(shí)監(jiān)控和數(shù)據(jù)的事后分析[18]。分別進(jìn)行以下測(cè)試:
1)極性測(cè)試:設(shè)置斜坡(Ramp)信號(hào)類型(缺省設(shè)置速度15°/s,最大幅值30°),正向和反向信號(hào)各加入一次,檢查算法的姿態(tài)跟蹤情況。平臺(tái)運(yùn)動(dòng)的方向應(yīng)該與加入信號(hào)的方向相反。
2)姿態(tài)跟蹤范圍測(cè)試:選擇斜坡(Ramp)信號(hào)類型,設(shè)置25°、30°、35°的最大范圍,正反向信號(hào)各加入一次,檢查算法的跟蹤情況,紀(jì)錄數(shù)據(jù)和分析,確定是否達(dá)到最大±30°的要求(系統(tǒng)軟件限幅為±32°)。
3)姿態(tài)跟蹤動(dòng)態(tài)性能測(cè)試:選擇階躍(Step)信號(hào)類型(缺省設(shè)置幅值10°),正反向信號(hào)各加入一次[19],檢查算法的動(dòng)態(tài)響應(yīng)過(guò)程,并紀(jì)錄數(shù)據(jù)和分析。系統(tǒng)從零到穩(wěn)態(tài)值的時(shí)間應(yīng)小于0.3 s,穩(wěn)定時(shí)間應(yīng)小于5 s,系統(tǒng)穩(wěn)態(tài)誤差應(yīng)小于1.5°。
4)姿態(tài)角速跟蹤誤差測(cè)試:選擇斜坡(Ramp)信號(hào)類型,設(shè)置25°/s恒定速度,最大幅值為30°。檢查算法的姿態(tài)跟蹤響應(yīng)過(guò)程,并紀(jì)錄數(shù)據(jù)和分析。響應(yīng)過(guò)程的姿態(tài)跟蹤誤差應(yīng)<1.5°。
5)姿態(tài)角速度及角加速度跟蹤誤差測(cè)試:選擇自定義(User)信號(hào)類型,最大角加速度為30°/s2,最大角速度為25°/s,最大角度為30°。檢查算法的姿態(tài)跟蹤響應(yīng)過(guò)程,并紀(jì)錄數(shù)據(jù)和分析。響應(yīng)過(guò)程的姿態(tài)跟蹤誤差應(yīng)<1.5°。
4 結(jié)束語(yǔ)
通過(guò)研究直升機(jī)姿態(tài)跟隨控制算法,控制隨動(dòng)平臺(tái)跟隨飛機(jī)的姿態(tài)調(diào)整激光測(cè)距儀的角度,保證激光測(cè)距儀始終垂向地面,解決姿態(tài)對(duì)激光測(cè)高數(shù)據(jù)精度的影響,測(cè)量精度高、獲取數(shù)據(jù)快、應(yīng)用范圍廣,測(cè)量精度理論值達(dá)到20 mm;通過(guò)數(shù)據(jù)融合技術(shù)匯入機(jī)載測(cè)試系統(tǒng),既可以進(jìn)行實(shí)時(shí)監(jiān)控又便于事后數(shù)據(jù)處理。該技術(shù)的成功應(yīng)用開(kāi)拓了直升機(jī)低高度測(cè)量技術(shù)的新領(lǐng)域,將極大地提高試飛效率,對(duì)促進(jìn)直升機(jī)試飛水平的提升具有重要作用。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
