鍵合機(jī)芯片翻轉(zhuǎn)機(jī)構(gòu)及其動(dòng)力學(xué)仿真
2018-08-17 06:12:32朱歡歡陳飛彪
電子工業(yè)專用設(shè)備 2018年4期
郭 聳,朱歡歡,陳飛彪
(上海微電子裝備有限公司,上海 201203)
引線鍵合技術(shù)作為一種成熟的芯片連接技術(shù)目前在封裝制程中得到廣泛應(yīng)用;但是隨著IC芯片特征尺寸的減小和集成規(guī)模的擴(kuò)大,的間距不斷縮小、數(shù)量不斷增多。當(dāng) 間距縮小到70 μm以下時(shí),引線鍵合技術(shù)就不再適用,必須尋求新的技術(shù)途徑。圓片級(jí)封裝(Wafer-Level Packaging,WLP)技術(shù)利用薄膜再分布工藝,使 可以分布在IC芯片的整個(gè)表面上而不再僅僅局限于IC芯片的周邊區(qū)域,從而解決了高密度、細(xì)間距IC芯片的電氣連接問(wèn)題。WLP技術(shù)以圓片為加工對(duì)象,在圓片上同時(shí)對(duì)眾多芯片進(jìn)行封裝、老化、測(cè)試,最后切割成單個(gè)器件。它使封裝尺寸減小至IC芯片的尺寸,生產(chǎn)成本大幅度下降,WLP技術(shù)的優(yōu)勢(shì)使其一出現(xiàn)就受到極大的關(guān)注并迅速獲得巨大的發(fā)展和廣泛的應(yīng)用。
WLP具有封裝尺寸較小、電性能較好的優(yōu)勢(shì),但目前較為成熟的WLP技術(shù),在單顆芯片上的植球數(shù)有一定限制;多用于低腳數(shù)消費(fèi)性IC的封裝應(yīng)用,在高腳數(shù)的芯片如通訊芯片等上應(yīng)用一直受限。為了解決WLP植球數(shù)不足的問(wèn)題,扇出晶圓級(jí)封裝(Fine out WLP)技術(shù)應(yīng)運(yùn)而生,如圖1所示。Fine out WLP將芯片嵌入環(huán)氧樹(shù)脂等材料中,形成重組圓片,然后利用前道隔離和平坦化工藝將互連扇出到芯片周圍區(qū)域、加入焊球,有效增大了芯片可焊球面積。已發(fā)展多年的扇出封裝技術(shù)未來(lái)將被更多芯片業(yè)者采納。

圖 1 Fine in和Fine out封裝
在Fine-Out(扇出)芯片鍵合制程中需要對(duì)芯片進(jìn)行重新布局,由于制造工藝的不同,芯片標(biāo)記面可能存在向上或向下工況。切割后的芯片(Die)進(jìn)入后道封裝制程時(shí),一般為芯片標(biāo)記面向上狀態(tài)。當(dāng)需求芯片標(biāo)記面向下時(shí),傳統(tǒng)方式需要以翻轉(zhuǎn)手將芯片翻轉(zhuǎn)180°,如圖2所示。然后拾取鍵合手與翻轉(zhuǎn)手交接芯片;這種工序?yàn)轫樞蚍绞剑瑢?dǎo)致設(shè)備產(chǎn)率不高。

圖2 芯片傳統(tǒng)分離方式原理圖
本設(shè)計(jì)通過(guò)兩個(gè)取放手旋轉(zhuǎn)交接實(shí)現(xiàn)芯片翻轉(zhuǎn),然后取放手2將芯片放置到暫存器交接位。暫存器上分布4個(gè)以上工位,可以保證取放手2與鍵合手同時(shí)取放芯片,如圖3所示。這種并行工作方式可以大大提高設(shè)備產(chǎn)率。

圖3 芯片創(chuàng)新分離方式原理圖
1 芯片翻轉(zhuǎn)機(jī)構(gòu)工作流程
貌本文所述,設(shè)計(jì)了一種新型芯片翻轉(zhuǎn)機(jī)構(gòu),如圖3所示。通過(guò)兩個(gè)取放手的交接實(shí)現(xiàn)芯片的180°翻轉(zhuǎn)。其中,取放手1用于從Wafer上拾取芯片(Die)并通過(guò)與取放手2的交接實(shí)現(xiàn)芯片(Die)的180°翻轉(zhuǎn)并放置到暫存器上的交接工位,暫存器旋轉(zhuǎn)位用于實(shí)現(xiàn)鍵合手拾取、鏡頭測(cè)量和取放手2放置芯片(Die)的同步工作,從而實(shí)現(xiàn)了工作效率的提高。其流程見(jiàn)表1。

表1 工作流程圖
2 芯片翻轉(zhuǎn)機(jī)構(gòu)設(shè)計(jì)與開(kāi)發(fā)
2.1 結(jié)構(gòu)設(shè)計(jì)與開(kāi)發(fā)
根據(jù)方案原理,取放手1為旋轉(zhuǎn)運(yùn)動(dòng)帶直線運(yùn)動(dòng),即,直線運(yùn)動(dòng)裝置安裝在轉(zhuǎn)臂上;取放手2為直線運(yùn)動(dòng)帶旋轉(zhuǎn)運(yùn)動(dòng),即,旋轉(zhuǎn)運(yùn)動(dòng)裝置安裝在直線運(yùn)動(dòng)副上。兩個(gè)取放手均選用不同直線伺服電機(jī)和旋轉(zhuǎn)伺服電機(jī)作為動(dòng)力源,以絕對(duì)光柵尺作為位置誤差測(cè)量元件,以光電傳感器作為電氣限位,以精密止動(dòng)螺釘作為機(jī)械限位;通過(guò)主副導(dǎo)軌配置結(jié)構(gòu)實(shí)現(xiàn)芯片柔性保護(hù),如圖3和圖4所示。

圖4 模型結(jié)構(gòu)圖
2.2 結(jié)構(gòu)開(kāi)發(fā)與參數(shù)設(shè)計(jì)
(1)取放手1為旋轉(zhuǎn)帶直線運(yùn)動(dòng),其轉(zhuǎn)臂負(fù)載大導(dǎo)致轉(zhuǎn)動(dòng)慣量大;取放手2為直線帶旋轉(zhuǎn)運(yùn)動(dòng),其轉(zhuǎn)臂負(fù)載小轉(zhuǎn)動(dòng)慣量小;根據(jù)轉(zhuǎn)動(dòng)慣量公式:

本設(shè)計(jì)中,取放手1旋轉(zhuǎn)電機(jī)負(fù)載130 g,取放手2旋轉(zhuǎn)電機(jī)負(fù)載40 g,負(fù)載質(zhì)心旋轉(zhuǎn)半徑約35 mm。由公式(1)得到需求的旋轉(zhuǎn)電機(jī)扭矩,并確定直線電機(jī)持續(xù)驅(qū)動(dòng)力。
(2)由于電機(jī)的發(fā)熱會(huì)導(dǎo)致環(huán)境和結(jié)構(gòu)件升溫,而影響交接位置精度。所選用某型號(hào)電機(jī)發(fā)熱仿真如圖5所示,結(jié)果顯示電機(jī)線圈溫度穩(wěn)定在46.17℃。另配局部環(huán)境氣浴和熱抽排,可以保證裝置工作環(huán)境溫度。

圖5 電機(jī)發(fā)熱仿真
3 芯片翻轉(zhuǎn)機(jī)構(gòu)的模態(tài)與頻響分析
針對(duì)精密運(yùn)動(dòng)裝置需要研究其結(jié)構(gòu)的動(dòng)力特性和頻率響應(yīng)。因此需要對(duì)結(jié)構(gòu)整體進(jìn)行模態(tài)分析和隨機(jī)振動(dòng)分析。
3.1 模態(tài)分析
對(duì)結(jié)構(gòu)的固有振動(dòng)特性進(jìn)行仿真分析,得出每階振型對(duì)應(yīng)模態(tài);并相應(yīng)做結(jié)構(gòu)優(yōu)化設(shè)計(jì)。
芯片翻轉(zhuǎn)機(jī)構(gòu)的有限元模型和模態(tài)仿真模型如圖6所示。
3.2 頻響分析
頻響分析主要用于計(jì)算結(jié)構(gòu)在周期振蕩載荷作用下對(duì)所計(jì)算頻率的動(dòng)響應(yīng)。根據(jù)計(jì)算,取放手2與暫存器的位置響應(yīng)滿足指標(biāo)需求,如圖7所示。
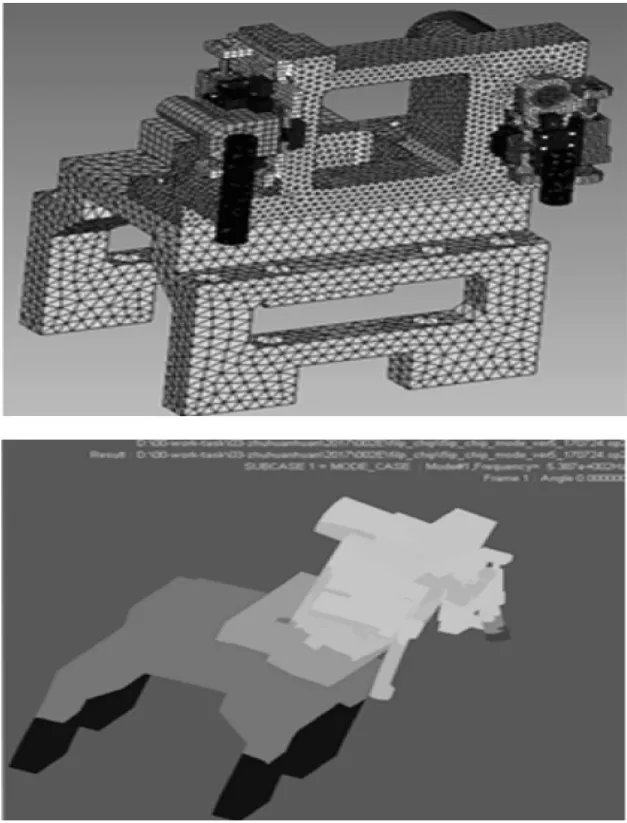
圖6 有限元及模態(tài)仿真模型

圖7 取放手2與暫存器相對(duì)位移
4 結(jié)束語(yǔ)
本文提出的芯片翻轉(zhuǎn)機(jī)構(gòu)作為一個(gè)獨(dú)立的芯片翻轉(zhuǎn)功能模塊,可以配套應(yīng)用于不同的芯片鍵合設(shè)備。本設(shè)計(jì)結(jié)構(gòu)簡(jiǎn)單,占用空間小、配置方式靈活。
本文所設(shè)計(jì)的芯片翻轉(zhuǎn)機(jī)構(gòu)實(shí)物樣機(jī)經(jīng)過(guò)測(cè)試、驗(yàn)證滿足設(shè)計(jì)要求,如圖8所示。并已在Fine-Out(扇出)芯片鍵合機(jī)上應(yīng)用。

圖8 芯片翻轉(zhuǎn)機(jī)構(gòu)實(shí)物樣機(jī)
猜你喜歡
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
中華詩(shī)詞(2019年7期)2019-11-25 01:43:04
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
計(jì)算物理(2014年2期)2014-03-11 17:01:39