24穴棉花精量穴播器的設計與研究
2018-08-17 01:27:46溫浩軍潘佛雛楊海濤
新疆農機化 2018年3期
彭 勇,溫浩軍※,潘佛雛,楊海濤
(1.石河子大學機械電氣工程學院,新疆 石河子 832000;2.新疆科神農業裝備科技開發股份有限公司)
0 引言
新疆因其獨特的地理位置,夏季日照時間長、氣溫高,成為中國棉花最大的種植基地[1]。棉花的播種是棉花種植過程中最為關鍵的環節,目前新疆棉花種植機械主要采用機械式和氣吸式精量穴播器[2~3],氣吸式穴播器結構復雜、易漏氣、耗能大;機械式穴播器結構簡單、加工成本低、配套適應性好,更適合新疆棉花種植發展的趨勢。但是,在目前常用的機械式穴播器中仍存在著卡種、漏種等現象,針對目前這一現狀,筆者設計了一種操作簡便、省時省力的24穴機械式精量穴播器。
1 結構組成及工作原理
1.1 結構組成
該機械式精量穴播器的結構如圖1所示,主要有鴨嘴、主軸、充種器、穴拐臂、取種器、腰帶、穴播器殼等組成。
1.2 工作原理
穴播器工作時,種子在穴播器內隨著腰帶轉動,在穴播器前進過程中利用種子自身的重力和慣性,通過取種器上的穴窩眼拾取種子,達到精量播種的目的。
種子進入充種腔后種子群由于重力的作用都聚集在穴播器的下部,在充種器的攪動下種子分布在取種器取種位置,穴播器整體轉動的過程中,種子落入取種器穴窩眼中,與定盤相配合的穴拐臂沿著定盤曲線面發生相對運動,種子在自身重力和慣性的作用下迅速脫離取種器窩眼,落入播種鴨嘴中,隨后鴨嘴入土打孔種子落入種穴內,完成播種過程。
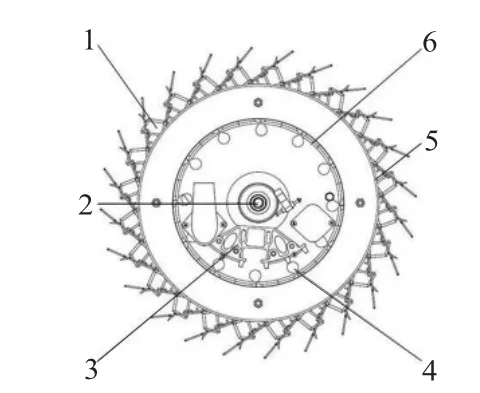
圖1 精量穴播器機構示意
2 關鍵部件設計
2.1 取種器的設計
取種器是機械式精量穴播器實現精量播種的核心工作部件,其工作性能的好壞直接決定了穴播器播種質量。
該新型取種器主要由穴拐臂、穴取種座、穴窩眼座、穴窩眼組成,結構如圖2所示,取種器的底端截面呈V型狀,穴窩眼、穴拐臂通過穴窩眼座安裝于穴取種座上。
2.2 穴窩眼的設計
穴窩眼的大小可根據棉花種子的物理特性進行設計分析,經試驗數據統計分析,棉花種子平均直徑為4 mm,結構如圖3所示。
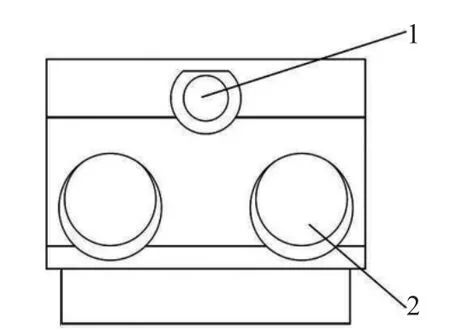
圖3 穴窩眼結構

圖4 腰帶結構示意
2.3 鴨嘴的設計
通過田間試驗,將腰帶設計成如圖4所示的結構形式,固定鴨嘴的成穴邊線與過鴨嘴根部的半徑成θ角,且θ在15°~25°時,具有良好的效果。穴播器在作業過程中滾動較平穩,利于保證對棉種的投種精度,保證投種質量,提高作業速度;鴨嘴出土過程中掛膜較小,通過性好,鋪膜效果較好。
3 三維建模
隨著CAD技術的迅速發展,SolidWorks可以通過數據轉化接口,非常簡便的將目前設計行業中幾乎所有的機械CAD軟件集成到本身的設計環境中來,也快速的被應用于各行各業的三維設計中[4]。
3.1 穴播器虛擬樣機的建立
利用SolidWorks軟件建立了穴播器各個零部件,其結構如圖5所示。
根據穴播器工作原理和已建立的零部件對其進行裝配,獲得了穴播器整體三維模型如圖6所示。
3.2 穴播器虛擬樣機的干涉檢查
穴播器中如果有的零件結構參數設計不合理或者裝配關系不對,將會存在零件之間的干涉現象,導致后面的生產制造出現重大問題。這種現象往往因為零部件的個數較多,我們肉眼無法觀察到,因此需要通過Solidworks零件裝配中的干涉檢查命令來用計算機檢查穴播器之間的裝配關系,確保穴播器安裝關系的正確性。

圖5 關鍵零部件三維模型
在Solidworks中完成穴播器的裝配后,在菜單欄中點擊“評估”→“干涉檢查”→“選擇裝配體”命令,點擊“確定”按鈕,如果存在零部件之間的干涉現象,需要重新進行結構參數的修改,再建立三維模型重新對裝配體干涉檢查。

圖6 穴播器三維模型
4 充種過程分析
棉花種子進入種子室呈散粒狀分布,通過內圈的帶動,在充種器的作用下種子匯集到充種區作半月形環流運動。此時種子進入取種器的方式主要有兩種[5~7]:(1)種子的自身重力、離心力及種子群的作用力共同作用下進入取種器V型槽;(2)種子從最高點通過種子群平面到種子室直接進入取種器。呈半月形環流分布的種子從最高點掉落時的角速度ki=0,離心力p=0,下落時種子在重力mg的作用下產生沖擊力Fi和種子的摩擦力Ff,進入取種器種子的速度則為v,與種子大小有關:
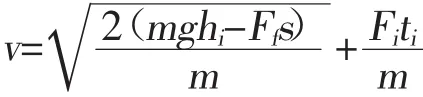
式中 hi—種子環流被帶起的高度;s—種子的滑移長度;m—種子的質量;ti—沖擊力Fi的作用時間;g—重力加速度。
5 結論
(1)針對現有的機械式棉花精量穴播器,利用棉花種子的物理特性設計了新型取種器,通過三維軟件Solidworks建立了穴播器三維虛擬模型,通過干涉檢查設計合理,所設計的穴播器,排種性能滿足新疆棉花膜上精量播種的農藝要求。
(2)研究分析了穴播器充種作業的過程,種子主要有兩種方式進入取種器,得出進入速度與種子大小有關
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50
