自動駕駛汽車測試評價方法體系研究
2018-08-16 07:25:22吳海飛宋雪松
質量與標準化 2018年5期
文 /吳海飛 宋雪松 曹 寅
自動駕駛汽車作為解決道路安全、交通擁堵等問題的終極方案,其意義不僅在于汽車產品與技術的升級,更有可能帶來汽車、相關產業格局和價值鏈體系的重塑,已經成為了中國、美國、日本和歐洲等國家和地區的未來發展戰略。
各企業爭先恐后推出的自動駕駛汽車是否滿足道路安全要求?對解決交通擁堵又有多大收益?該如何對自動駕駛汽車進行評價?目前沒有一套成熟的測試體系。
一、自動駕駛汽車測試標準體系現狀
1. 國內外自動駕駛汽車標準體系戰略介紹
現階段,高級別的自動駕駛相關標準尚未出臺,主要國家和國際組織的標準、法規仍以高級駕駛輔助系統(ADAS)功能類標準為主。國際標準化組織(ISO)已經將自動駕駛汽車相關標準、法規協調作為重點工作,目前已發布的相關標準主要有ISO 17361-2017《智能運輸系統—車道偏離預警系統—性能要求及試驗方法》和ISO 22178-2009《智能運輸系統—低速跟隨行駛系統—性能要求及試驗方法》等。世界車輛法規協調論壇(WP29)也設立了ITS/AD非正式工作組,于2017年3年啟動了自動緊急制動系統(AEBs)與自動轉向控制功能(ACSF)法規制定工作,在原有的制動和轉向控制標準(ECER131、ECER79)中進行修訂,計劃在2018年提交法規草案。
2017年12月,我國制定了《國家車聯網產業標準體系建設指南》,旨在指導智能網聯汽車標準化工作,加快構建包括整車、關鍵系統部件功能安全和信息安全在內的智能網聯標準體系,并逐步形成統一、協調的國家車聯網產業標準體系架構。2018年1月,國家發展和改革委員會發布了智能汽車創新發展戰略征求意見稿,把構建系統完善的智能汽車法規標準體系作為一項重要戰略任務,通過健全法律法規、完善技術標準、推動認證認可等措施來推動智能網聯汽車產業發展。
2. 我國自動駕駛標準體系建設
中國汽車標準化技術委員會智能網聯汽車分技術委員會于2018年4月成立,分標委下設立ADAS、汽車信息安全和自動駕駛三個標準工作組以及國際協調專家組。標準體系建設方面,計劃到2020年,初步建立能夠支撐駕駛輔助和低級別自動駕駛的智能網聯汽車標準體系,制定30項以上智能網聯汽車重點標準,涵蓋功能安全、信息安全和人機界面等通用技術和信息感知與交互、決策預警和輔助控制等核心功能相關的技術要求和試驗方法;到2025年,將建成能夠支撐高級別自動駕駛的智能網聯汽車標準體系,制定100項以上智能網聯汽車標準,涵蓋智能化自動控制、網聯化協同決策技術以及典型場景下自動駕駛功能與性能相關的技術要求和評價方法。目前,已開展的標準制定計劃包括自動緊急制動系統(AEB)、車道保持輔助系統(LKA)、盲區監視系統(BSM)和自動泊車系統等。
除了國家標準,2017年10月,上海市成立了智能網聯汽車和應用標準工作組,以推進智能網聯汽車地方標準的先行先試。第一批研究制定的相關標準包括:《智能引導、充電停車庫和管理系統技術規范》《基于上海道路環境的車輛車道盲區監控系統性能要求及測試方法》《基于上海道路環境的車道偏離預警系統性能要求及測試方法》等。
二、自動駕駛測試評價挑戰分析
1. 安全性評價挑戰
安全性的評估主要涉及交通事故。據統計,90%的傳統汽車交通事故是駕駛員操作錯誤造成的,而自動駕駛則是通過機器代替人類駕駛,不會產生疲勞、分心,可以顯著降低由于操作錯誤產生的交通事故。但是,目前自動駕駛系統的技術還不夠成熟,社會體系的融入問題依然沒有解決。因此,也會帶來新的、甚至更加嚴重的危險,比如復雜的天氣和交通環境、信息安全以及自動系統故障等風險。無論自動駕駛技術多么成熟,都無法避免事故的發生,那么,自動駕駛汽車究竟需要多么安全才能投放市場?
根據美國DOT數據,在美國,每行駛1億公里,因交通事故受傷的有77人,死亡1.09人。因此,為了證明自動駕駛汽車也具備每1億公里1.09死亡人數的水平甚至更高,需要幾億公里甚至幾十億公里的道路測試和非常高的時間與金錢成本;再者嚴苛的工況在道路測試中可遇不可求,即使遇見了也無法進行重復驗證。道路交通事故測試場景需能夠體現出實際交通環境下的高危場景。那么,以人類駕駛歷史交通事故信息為基礎構建相應的測試場景,理論上應該可以縮短道路測試的里程。但是,就算自動駕駛車輛遍歷了人類駕駛歷史交通事故場景,也不能從根本上解決自動駕駛的安全性問題;自動駕駛汽車不存在醉酒、分心和疲勞,而這些因素占所有事故原因的50%以上。所以,事故場景中有一大部分場景對自動駕駛是沒有意義的。
自動駕駛安全測試面臨的更大挑戰是隨機情況處理能力測試,比如道路環境問題、信息安全問題和系統故障問題等都是隨機并且不可預知。
2. 高效性評價挑戰
高效性評價主要涉及單車、路口、某條走廊或者區域內的交通移動表現,包括用戶使用的便捷性和到達目的地的效率等。
很顯然,自動駕駛汽車在解決員工通勤時間長的問題上具有非常好的應用前景,它可以完美地解決最后一公里的出行問題,用戶無需親自停車,也不用走去停車場;通過自動駕駛汽車構建的智能交通,以云平臺控制,從而提高區域的交通效率。雖然自動駕駛汽車在降低交通事故的同時必然可以減少擁堵,但是自動駕駛功能在一定條件下同樣會影響交通效率。比如:自動跟車功能可能會設置一個較長的跟隨距離,這可能會提高其安全性,但也會降低車道的通過量。
單車的測試往往不能全面地評價自動駕駛汽車效率,還應評估一組自動駕駛汽車在一定的周期內對某個區域交通效率的影響,這就需要一個非常復雜的現實或者虛擬的交通模型。自動駕駛汽車與非自動駕駛汽車混合駕駛的時期,評價會變得更復雜。目前,比較常用的區域交通效率指標(平均出行時間、出行指數等)會隨著自動駕駛汽車技術的發展而不斷地發生變化,比如出行更方便,人們會有更強的意愿去更遠的地方,更頻繁的出行,從而再次影響區域交通效率。
3. 舒適性評價挑戰
舒適性的評價主要涉及駕駛員或者乘員的駕乘體驗。傳統汽車舒適性評價主要通過人體總的振動加速度與主觀感覺來判斷舒適性。這一評價內容只是自動駕駛汽車舒適性評價中的一部分;評價的另一部分內容是駕駛員或者乘員對于自動駕駛系統本身的感受,包括加速、剎車、轉向、換道以及人機交互等。
不同國家、不同區域的用戶由于駕駛習慣的不同,對待同一自動駕駛功能的主觀感受也會不同。如,歐美開發的前方碰撞預警(FCW)系統報警碰撞時間(TTC)通常為2.5 秒,這里拋開安全性考慮,2.5 秒以上的跟車時距在歐美是能夠被接受的,但這功能很可能會被大部分國內用戶關閉,因為我國駕駛員的習慣跟車距離往往比該限值近得多。
因此,駕駛員行為模型對自動駕駛舒適性評價顯得尤為重要,而要建立一個基于舒適性評價的駕駛員模型本身就是一個挑戰。隨著自動駕駛技術的發展,駕駛員的駕駛行為也會不斷變化,駕駛員模型需不斷地進行迭代。當車輛不再需要駕駛員時,用戶作為乘員的身份對跟車距離、變道時機等因素可能不再關心,但會更關注人機交互、娛樂系統等因素。
三、自動駕駛汽車評價框架
通過以上分析可以得出,自動駕駛汽車評價是一個體系,任何一種單一測試方法都無法得到一個較為全面的結果。另外,該體系還必須是持續靈活的,隨著自動駕駛技術的發展而不斷地進行更新迭代。
本文提出的評價框架(見圖1)是以數據庫為基礎,通過篩選邏輯確定虛擬測試、場地測試和公共道路測試之間的場景比例,三種測試方法之間相互補充,對自動駕駛汽車進行更全面的評價。在安全性評價內容中還應增加故障注入和系統風險分析等手段,有針對性地評價自動駕駛汽車的隨機事件處理能力、網絡安全性和故障處理能力。
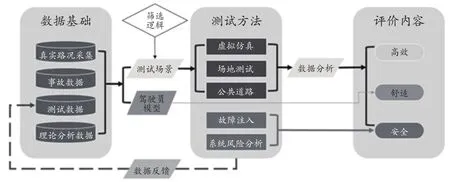
圖1 自動駕駛汽車評價框架
框架中篩選邏輯以由簡單到復雜為原則,如場景覆蓋單車單車道、多車單車道、多車多車道、路口、帶信號燈路口、快速走廊和區域交通場景等,可以從微觀到宏觀層面全面評價一輛或一組自動駕駛汽車。安全性評價、高效性評價和舒適性評價之間的篩選邏輯也不應完全相同,安全性注重單車、短時間內的系統性能;高效性注重的是多車、區域內、長周期內的性能表現。根據測試數據采集類型的不同,其虛擬仿真模型也完全不同,如舒適性評價應加入人類駕駛員模型進行對比。
框架中的數據基礎、篩選邏輯以及測試方法都是持續靈活、不斷迭代的。測試評價指標涵蓋多空間、多時間維度,不僅可以評價自動駕駛汽車單場景單次的測試性能表現,也應該能評價多車、長周期內的性能表現。
四、總 結
自動駕駛的實現需要集汽車、信息通信、交通甚至人工智能等多領域技術,加上無法窮舉的隨機工況,自動駕駛汽車測試評價面臨著極大的挑戰。對此,本文歸納出一個評價框架,該框架以數據庫為基礎,通過多手段、多空間維度和多時間維度可以對自動駕駛汽車的安全性、高效性以及舒適性進行評價。該框架目前還只是初步研究階段,后續需進行一系列的細化與驗證,才能更好地應用到產品開發與標準研究中。
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
建筑熱能通風空調(2018年5期)2018-07-09 03:16:38
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
池州學院學報(2017年3期)2017-10-16 01:38:35
公民與法治(2016年4期)2016-05-17 04:09:26
作文大王·低年級(2016年4期)2016-04-18 00:24:37
消費者報道(2016年3期)2016-02-28 19:07:32
決策探索(2014年21期)2014-11-25 12:29:50
汽車零部件(2014年6期)2014-09-20 06:24:48