插秧機核心部件改進研究
2018-08-10 09:30:16向承翔
農(nóng)機化研究 2018年11期
向承翔
(重慶三峽職業(yè)學(xué)院,重慶 404155)
0 引言
插秧機作為一種常用的農(nóng)用機械之一,在我國的水稻行業(yè)起著不可或缺的作用。隨著農(nóng)業(yè)機械化水平的不斷進步與發(fā)展,水稻插秧的技術(shù)不斷朝著機械化、自動化方向發(fā)展。多年來,我國、日本及其他農(nóng)業(yè)國家都不斷致力于插秧機的技術(shù)與機構(gòu)優(yōu)化改進,從最初的曲柄搖桿式發(fā)展到非圓齒輪傳動式、曲柄行星輪系式及改變株距插秧等,插秧機的工作性能在逐步提高,但均為適應(yīng)當(dāng)?shù)氐淖鳂I(yè)場地及土壤條件等而選擇。為適應(yīng)我國當(dāng)?shù)氐乃痉N植與生產(chǎn)的農(nóng)藝要求,對其進行核心部件針對性地改進,可為提高水稻產(chǎn)量與質(zhì)量及水稻種植提供安全可靠機具,具有十分重要的現(xiàn)實意義。
1 插秧機結(jié)構(gòu)及工作原理
水稻插秧機主要的組成部件有儲存秧苗裝置、輸送裝置及插秧裝置等組成。工作原理:由發(fā)動機主要提供動力,供給插秧機的行走部與插秧部;行走部為四輪驅(qū)動,在液壓無級變速方式下進行驅(qū)動整機轉(zhuǎn)向、前進等作業(yè);插秧部為核心部件,通過機械自動插秧,實現(xiàn)插秧的行數(shù)、行距及株距的一致。此過程在齒輪系的作用下通過中心輪、太陽輪、中間輪、行星輪等一系列傳動保證秧針的取送秧及回轉(zhuǎn)避讓等運動,進而實現(xiàn)插秧的橫送量控制。
2 核心部件設(shè)計與改進
2.1 插秧機構(gòu)設(shè)計
根據(jù)插秧機構(gòu)工作時的各部件動作執(zhí)行先后順序及動作條件,給出插秧機構(gòu)設(shè)計所需的輪系相關(guān)參數(shù)條件。根據(jù)行星輪系的體積計算,給定插秧機構(gòu)在旋轉(zhuǎn)插秧作業(yè)時各齒輪軌跡形成封閉曲線條件,即

(1)
(2)
同時,根據(jù)齒輪設(shè)計標(biāo)準(zhǔn)對插秧部件各齒輪進行參數(shù)計算和設(shè)計改進,齒面接觸疲勞強度與齒根彎曲疲勞強度及傳動比按照式(3)~式(5)進行設(shè)計,即
(3)
(4)
(5)
以非圓齒輪運動學(xué)機理為理論模型,為更深入準(zhǔn)確地了解插秧機構(gòu)的運動學(xué)軌跡,選取影響插秧機軌跡形成及位姿的關(guān)鍵參數(shù),如表1所示。通過變換各參數(shù)的影響值確認(rèn)最佳設(shè)計參數(shù),結(jié)合插秧機構(gòu)關(guān)鍵組成部件繪制成三維模型(見圖1),主要包括各傳動輪系及推秧裝置中的推秧桿、秧針及凸輪等。其中,推秧裝置的推秧角度及插秧臂相互之間的位置關(guān)系對于秧苗的正確插入是設(shè)計的關(guān)鍵點。

表1 插秧機插秧機構(gòu)軌跡與姿態(tài)關(guān)鍵參數(shù)值Table 1 Key parameter values of the track and posture on the transplanting mechanism of the transplanter
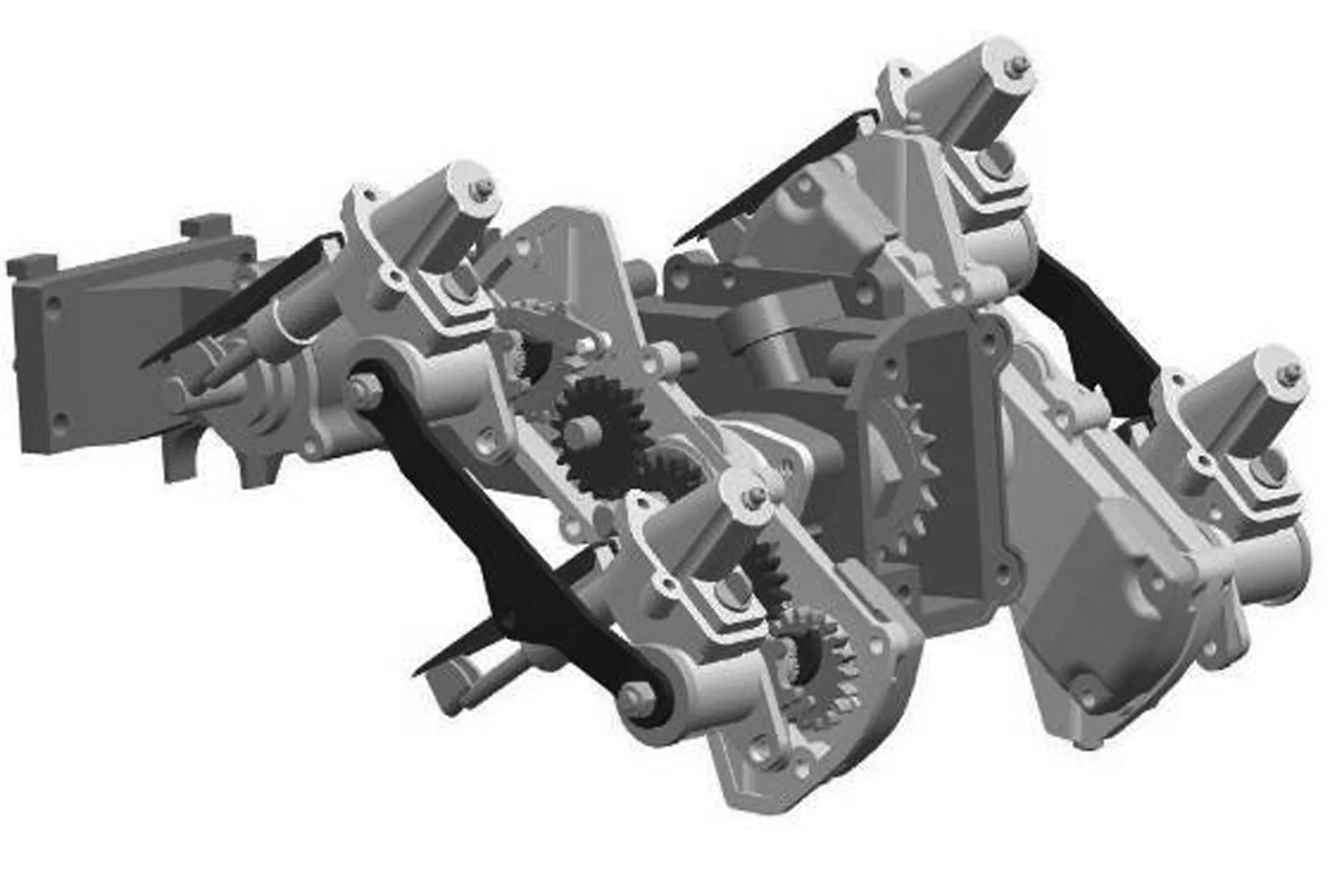
圖1 插秧機插秧裝置三維模型簡圖Fig.1 3D model brief diagram of the planting device of the transplanter
2.2 移箱核心構(gòu)件設(shè)計
為保證高速插秧機在準(zhǔn)確插秧的同時,工作可靠性與移箱機構(gòu)的核心部件密切相關(guān),插秧作業(yè)過程中間距的調(diào)整需要由移箱機構(gòu)來完成。針對移箱的核心構(gòu)件螺旋軸進行受力分析,且改進參數(shù),使得所設(shè)計的插秧機移箱構(gòu)件能夠精準(zhǔn)靈活地在秧苗箱體內(nèi)部進行推秧、取秧等作業(yè),配合完成插秧的關(guān)鍵環(huán)節(jié)。設(shè)計螺旋軸利用如下公式,即
(6)
式中τ—螺旋軸所受剪切力(MPa);
[τ]—最大許用剪切應(yīng)力(MPa);
d—螺旋軸直徑(mm);
P—軸功率(kW);
n—螺旋軸轉(zhuǎn)速(r/min)。
通過計算,選取軸徑d的優(yōu)化取值范圍:18~20mm,并通過查閱相關(guān)參數(shù)設(shè)計標(biāo)準(zhǔn),得出具體的參數(shù)設(shè)計值,如表2所示。同時,并對內(nèi)部轉(zhuǎn)子參數(shù)進行選取匹配且經(jīng)過模態(tài)處理,可知已避開共振頻率帶,可實現(xiàn)移箱機構(gòu)平穩(wěn)傳送秧苗。
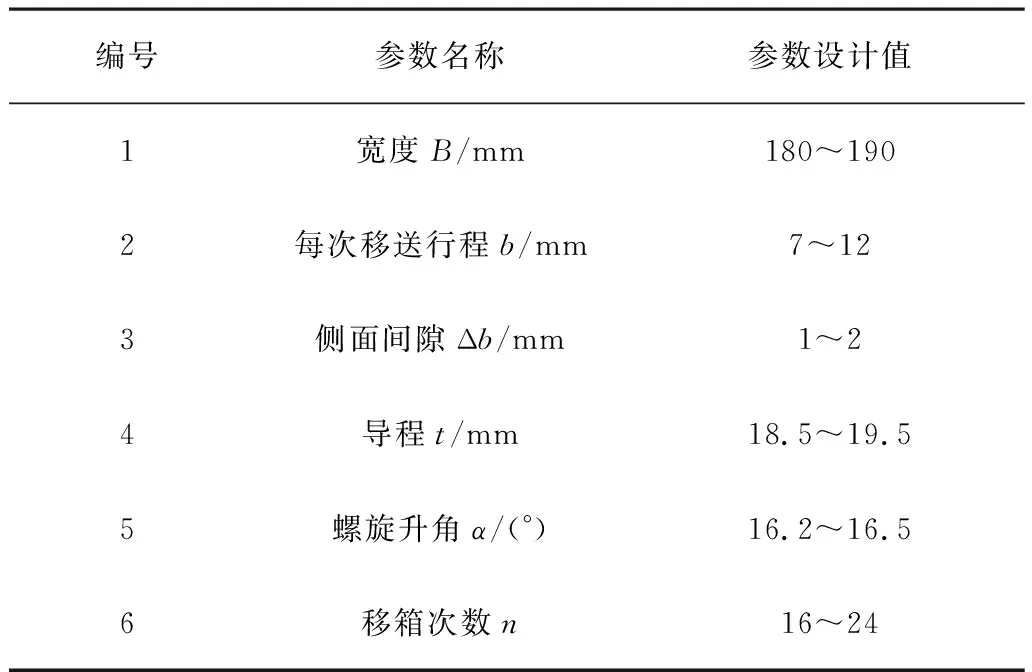
表2 高速插秧機移箱螺旋軸關(guān)鍵參數(shù)設(shè)計值Table 2 Key parameter design values of the screw axis of the moving box in the high-speed transplanter
2.3 輔助軟件程序優(yōu)化
為進一步改進運動學(xué)與動力學(xué)上各核心部件選取參數(shù)的性能協(xié)調(diào)及優(yōu)化度,選取輔助軟件MatLab軟件進行算法比較,選擇FMINCON進行目標(biāo)函數(shù)最優(yōu)化求解,算法流程簡圖如圖2所示。通過多次計算比較修正函數(shù)矩陣,得出最理想的參數(shù)值。此處給出部分程序段:
for i=1∶1.5;
rhoz(i)=p2/(1-E*cos(n1*l1(i)));
Rhoz(i)=sqrt(rhoz(i)^2+2*rhoz(i)*(CX*cos(l1(i))+
CY*sin(l1(i))+CX^2+CY^2);
fr=@(x)sqrt((QL(i)*cos(angle)*(cos(x)+x*sin(x))-
QL(i))^2;
…
…
Flot(fy,[-60,60]);
qqz(i)=fzero(fy,[-5,12]);
end
rhot6(i)= sqrt(rho5(i)^2+2*rho5(i)*(CX*cos(l1(i))+
CY*sin(l1(i))+CX^2+CY^2);
end
…
…
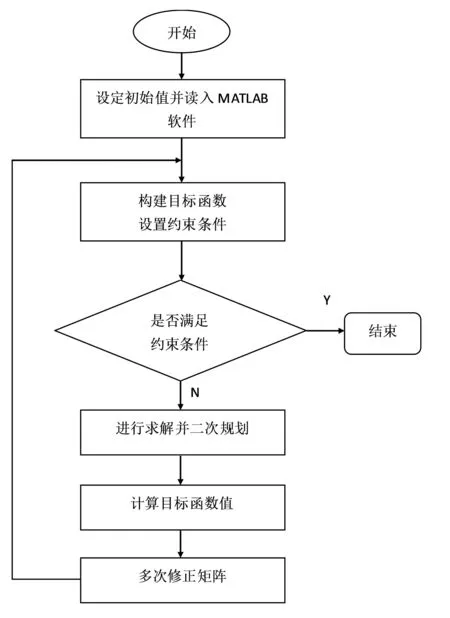
圖2 插秧機最優(yōu)值優(yōu)化算法流程簡圖Fig.2 Optimization algorithm brief diagram of the most optimal value of the transplanter
3 仿真試驗分析
3.1 仿真條件
仿真系統(tǒng)的環(huán)境及相關(guān)參數(shù)條件設(shè)置對于仿真試驗的接近性與可參考性起決定性作用,筆者選取ADAMS進行材料屬性及關(guān)鍵求解所需約束條件的設(shè)置:
1)取秧角度的選取,宜為15°~35°左右;
2)保證推秧角度與取秧角度之間的關(guān)系;
3)仿真初始位置選取;
4)待獲取數(shù)據(jù)前置條件給定;
5)單位設(shè)置統(tǒng)一等。
3.2 過程分析
通過從不同角度、不同轉(zhuǎn)動副與移動副角度施加載荷等相關(guān)參數(shù),模擬仿真插秧機在實地進行插秧作業(yè)過程各作用部件所受的接觸力、嚙合力及傳動力等;著重考慮轉(zhuǎn)速與加速度的變化情況,并通過截取放大關(guān)鍵秧針尖點A的MARKET,分析其相對于行星架的相對運動速度與相對位移之間的軌跡情況,并繪制出曲線,如圖3、圖4所示。從圖3、圖4中可看出:該尖點的運動仿真情況與前期所做的理論計算相吻合,符合實際的插秧尖點運動,模擬仿真有效。
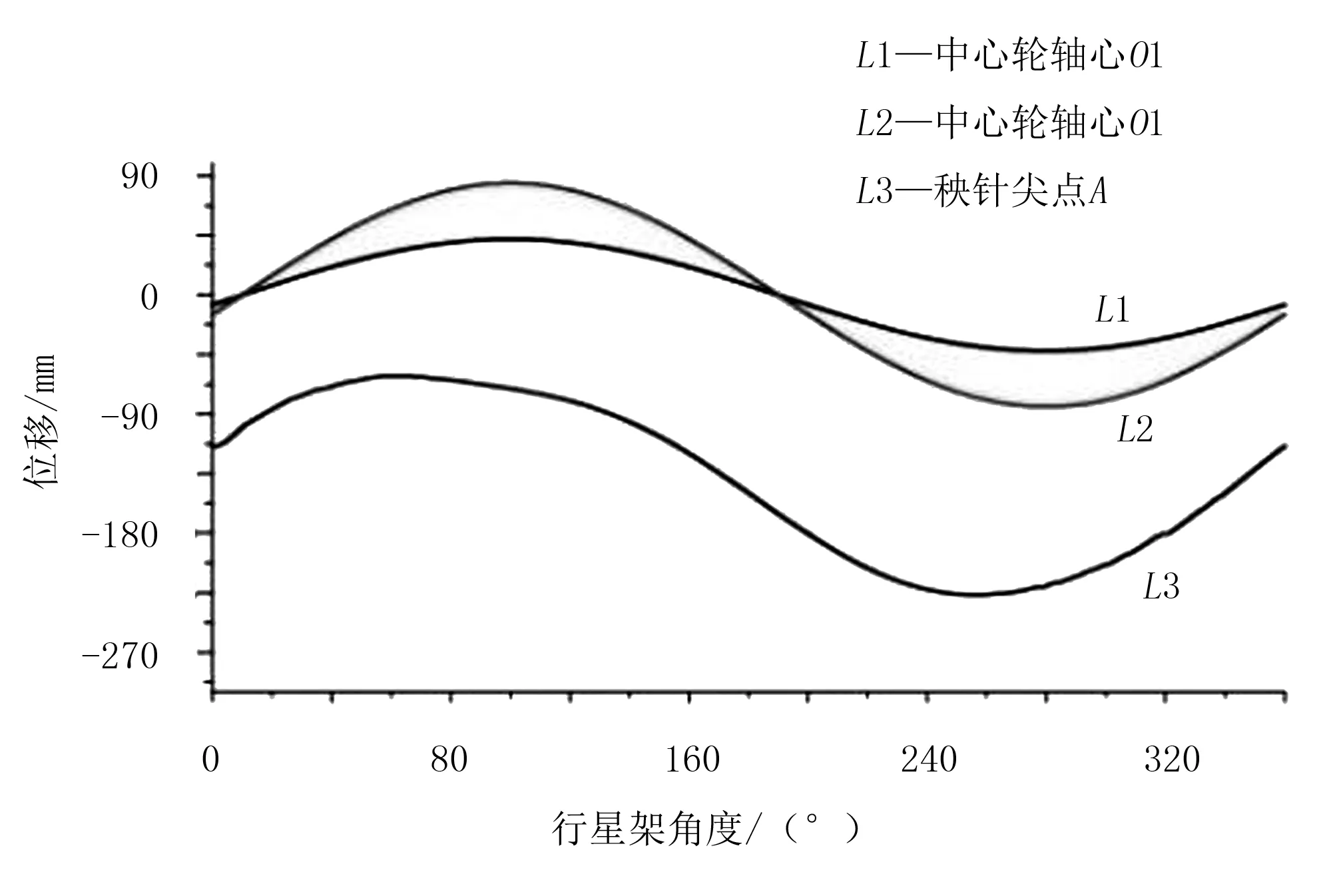
圖3 插秧機插秧尖點相對位移曲線Fig.3 Relative displacement curves of the planting device sharp point of the transplanter

圖4 插秧機插秧尖點相對運動速度曲線Fig.4 Relative movement speed curves of the planting device
sharp point of the transplanter
由圖5可以看出:插秧機的插秧裝置呈腰子狀曲線運動,亦符合實地作業(yè)規(guī)律。經(jīng)按照機械結(jié)構(gòu)設(shè)計的計算與對比發(fā)現(xiàn),較進行核心部件改進前的插秧機整機質(zhì)量減輕15%左右,且各結(jié)構(gòu)間的協(xié)調(diào)能力得到整體提高,設(shè)計參數(shù)及仿真試驗可行。
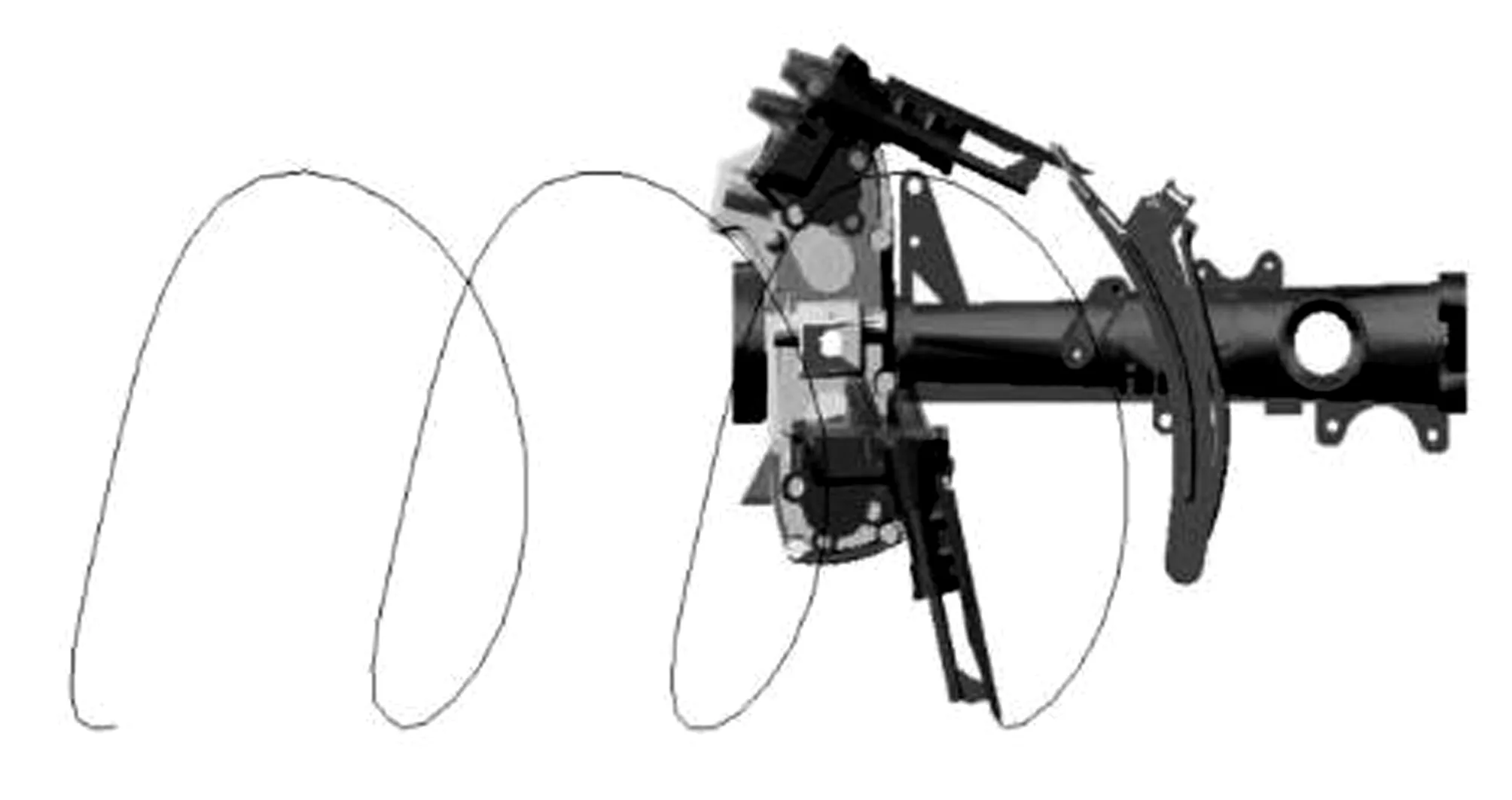
圖5 插秧機插秧裝置運動軌跡仿真簡圖Fig.5 Dynamic trajectory simulation brief diagram of the planting device of the transplanter
4 結(jié)論
1)在高速插秧機工作原理基礎(chǔ)上對其插秧機構(gòu)進行改進研究,利用運動學(xué)與動力學(xué)相結(jié)合方法進行參數(shù)優(yōu)化,并得出三維模型。
2)對插秧機移箱運動裝置進行改進,分析螺旋軸的運動規(guī)律并結(jié)合優(yōu)化函數(shù)進行輔助設(shè)計。
3)通過利用仿真軟件進行驗證分析,得出設(shè)計研究的可行性與合理性,為插秧機的改進提供一定理論依據(jù)與優(yōu)化思路。
4)建議下一步將機械設(shè)計與PID機械部件智能化控制相結(jié)合,更好地實現(xiàn)插秧機機械自動化作業(yè)。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
故事大王(2016年7期)2016-09-22 17:30:08
兒童故事畫報(2013年3期)2013-06-24 05:40:30
