農業機器人靈巧手遙操作虛擬現實實驗平臺
——基于LabVIEW
2018-08-10 09:23:06趙階晨
農機化研究 2018年10期
趙階晨
(黃山職業技術學院,安徽 黃山 245000)
0 引言
隨著科學水平的不斷發展及人類社會活動的拓展升級,深入研究機器人并讓其更好地服務于人類已成為發展趨勢。人類絕大多數的工作都是依靠雙手完成的,目前為止,機械臂技術基本成熟,倘若靈巧手的研究能夠跟上,那么機器人代替人類指日可待。本文根據農業機器人工作特性,結合機器人的結構,采用虛擬現實技術,并結合LabVIEW軟件開發了上位機,對靈巧手遙操作進行研究,并對靈巧手抓取過程進行實時控制與監測。
1 虛擬現實技術
虛擬現實技術(VR)是計算機控制領域最前沿的新型技術,主要是利用計算機仿真模擬出一種虛擬的場景,用戶在場景內可以通過觸覺、聽覺、視覺感知場景的變化情況,從而使自己沉浸于虛擬世界中,并與其進行一系列的交互。VR技術現已廣泛應用于軟件模擬仿真、影視動漫設計、房地產樣品房設計和3D游戲等領域。
1.1 虛擬現實技術概念與應用領域
1)虛擬現實技術概念。虛擬現實技術是一門綜合性學科,包含了計算機圖形學、模擬仿真、動漫設計、智能控制、多傳感器融合和圖像處理等多學科技術。多學科和高新技術的集成與融合給虛擬現實技術帶來了高逼真的場景體驗,通過模擬人的視、聽、觸、運動等行為的人機接口技術及特定設備,使客戶能夠進去虛擬世界,獲得身臨其境的體驗,客戶通過人機交互裝置便可以去探索宏觀與微觀世界中事物運動變化的差別。
虛擬現實技術的首要元素是在計算機平臺上面建立3D場景,使用者通過聽覺、視覺和觸覺去感知3D場景,并能夠通過特殊的交互設備去操作其中的物體器件,能夠以自己的意志感覺隨意行走控制場景;其次,虛擬現實技術采用一種先進的用戶接口技術。目前,人機接口主要包括鍵盤、 鼠標、優盤等面向機器的接口,而虛擬現實采用的接口卻是面向用戶。
2)虛擬現實技術的應用領域。虛擬現實技術最先出現時,主要是應用于軍事上的模擬訓練。初期主要是訓練宇航員、飛行員,3D模擬場景可以模擬出在外太空和飛機上的真實場景,各種設備儀器可以真實地進行操作和工作。宇航員和飛行員可以在虛擬場景中模擬出極端的飛行條件,然后嘗試著去解決問題。由此可以提高宇航員和飛行員的實戰經歷,且不會有什么危險,更不會損壞航天器和飛機而造成經濟損失。另外,各國軍事部門正在研制一些模擬戰場(如陸戰、空戰、海戰等訓練場景),在節省訓練成本和提高訓練效率的同時大大降低了人員的傷亡率。
虛擬現實技術作為新興產業,其發展才剛剛起步,隨著技術的逐漸進步和成熟,未來將應用于更多的場合。
1.2 虛擬現實技術系統組成
虛擬現實技術系統可以根據實際的應用需求進行開發,其主要由以下4部分組成:①3D虛擬場景,是一個由計算機軟件模擬出來的可交互場景,用戶可以全方位地進行觀看或加入。②計算機平臺,為系統提供觀察和人機交互的功能。③I/O人機接口,為用戶和虛擬場景提供交互的工具;④用戶,即整個3D虛擬場景的操縱者。
虛擬現實技術系統框架如圖1所示。圖1中,I/O 人機接口為用戶和計算機之間的交互提供了接口,3D虛擬場景由計算機根據軟件和數據庫建立。
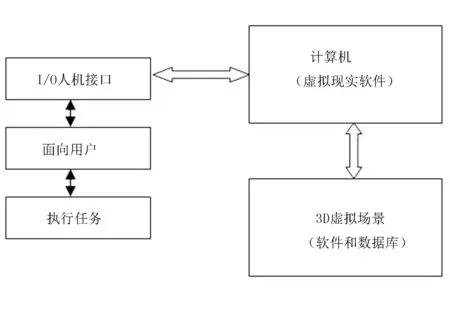
圖1 虛擬現實技術系統框架
2 農業機器人靈巧手遙操作軟硬件設計
2.1 農業機器人靈巧手遙操作硬件架構設計
靈巧手遙操作虛擬現實實驗平臺采用分層搭建的思想,在硬件框架設計上分為人機接口和靈巧手控制系統兩部分。硬件架構如圖2所示。

圖2 硬件設計架構圖
人機接口系統主要包括虛擬現實作業環境、液晶顯示模塊和控制器按鈕組成的控制界面。虛擬現實作業環境可以根據要求模擬仿真出農業機器人靈巧手作業區域的實時場景;控制界面的虛擬現實環境可以實時將靈巧手作業畫面現實在終端設備上,供操作人員參考,使其能夠準確、及時地操作靈巧書進行作業。控制界面主要提供給操作人員,操作人員根據界面獲取作業現場和靈巧手的實時數據信息,并采取一定措施進行操控。
靈巧手控制系統包括圖像處理模塊、靈巧手控制器及LabVIEW上位機等。圖像處理模塊主要是對CCD攝像機獲取的圖像信息進行實時處理,然后回傳給主控制器;靈巧手控制器主要是根據人機接口系統發送過控制信息對靈巧手進行實時控制;LabVIEW上位機則是實時對靈巧手的運動信息進行搜集分析,然后將信息反饋給主控制器,再將信息發送給人機接口系統。
在實際的應用中,靈巧手安裝在農業機器人末端控制器上,人機接口系統和靈巧手控制系統的工作原理如圖3所示。
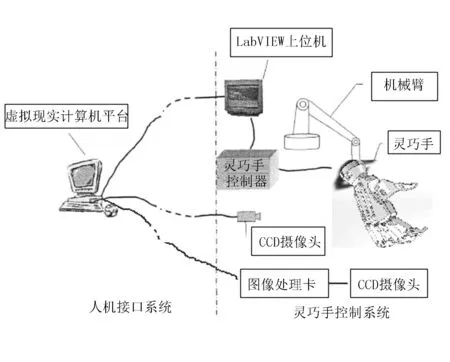
圖3 人機接口與靈巧手的工作原理圖
2.2 農業機器人靈巧手遙操作軟件架構設計
系統軟件架構設計采用模塊化編程思想,主要包括系統主程序、驅動控制子程序、圖像處理子程序、虛擬仿真子程序、信息分析子程序、通訊子程序和LabVIEW上位機。軟件設計架構如圖4所示。
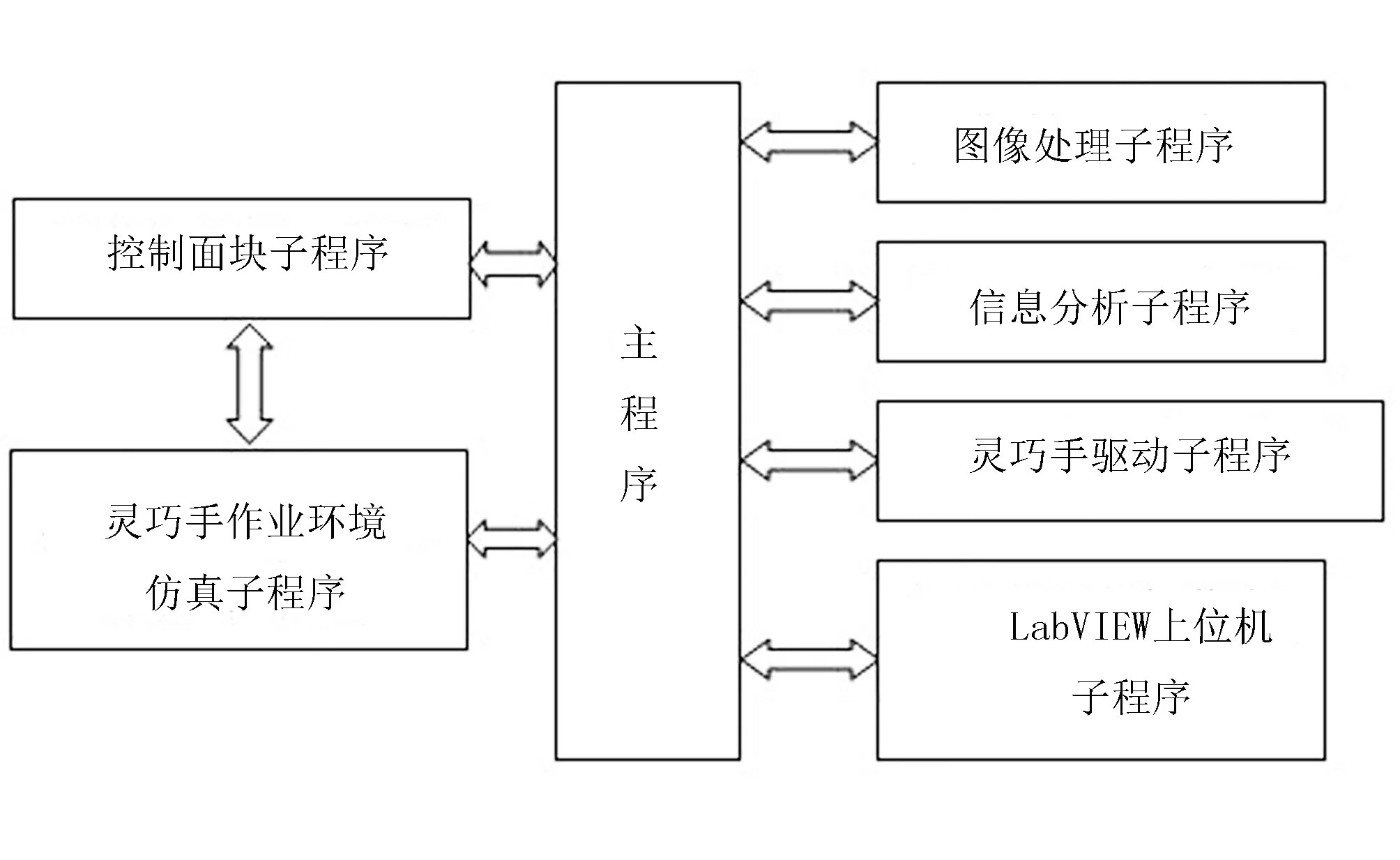
圖4 軟件設計架構圖
主程序開始工作時,首先對各子程序進行一系列的初始化,然后根據預先設定的流程或者根據操作人員輸出的信息執行對應子程序,實現指定的功能。主程序流程如圖5所示。
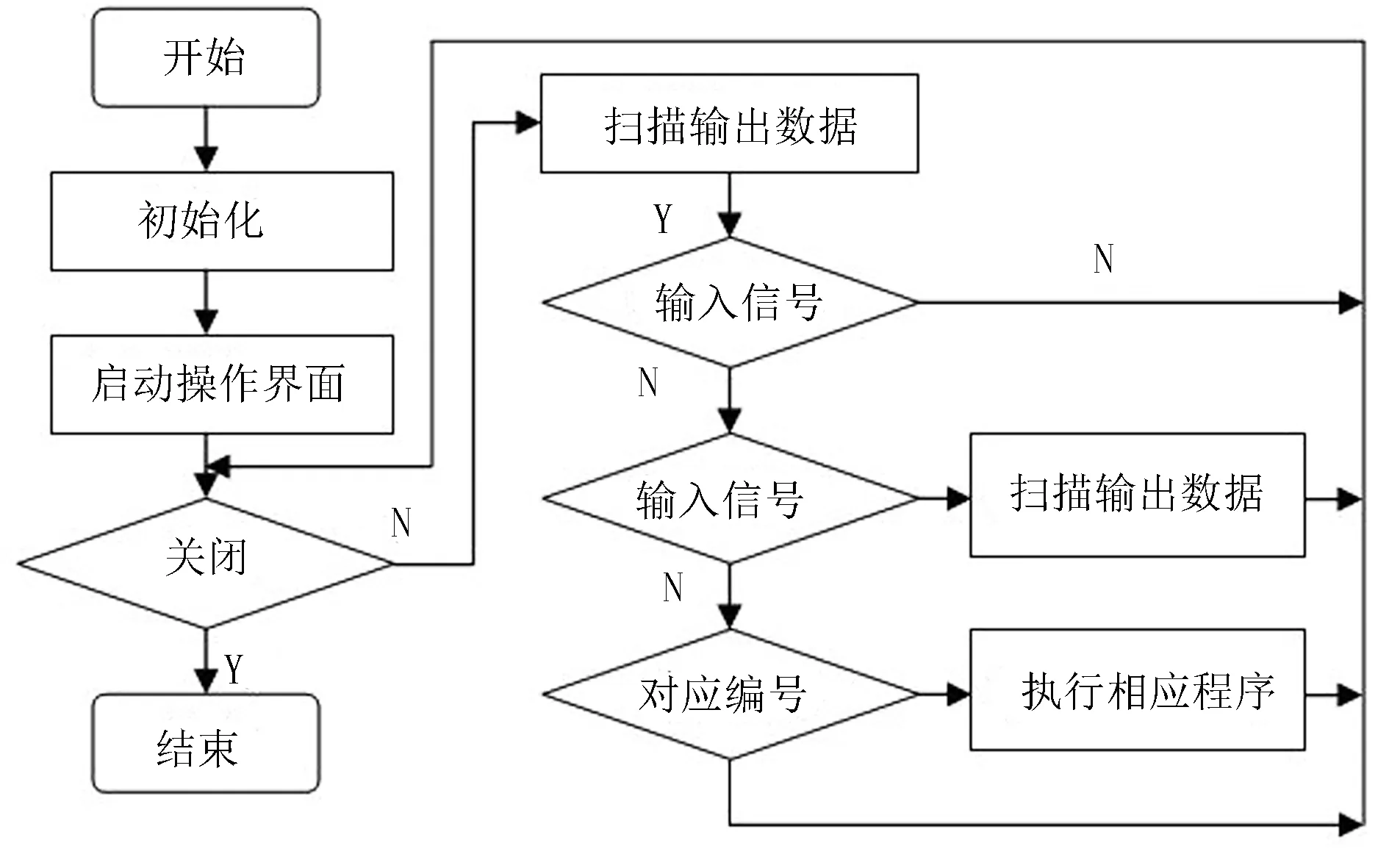
圖5 主程序流程圖
3 農業機器人靈巧手遙操作虛擬現實實驗平臺
3.1 虛擬現實環境建模
靈巧手虛擬現實環境采用計算機軟件仿真模擬,借助虛擬建模軟件搭建靈巧手作業環境,帶給操作者視覺上的事實操作感覺。虛擬現實系統的操縱對象是農業機器人靈巧手和實時環境場景,靈巧手虛擬現實環境的對象是農業機器人靈巧手和目標物體。靈巧手虛擬現實環境建模結構如圖6所示。
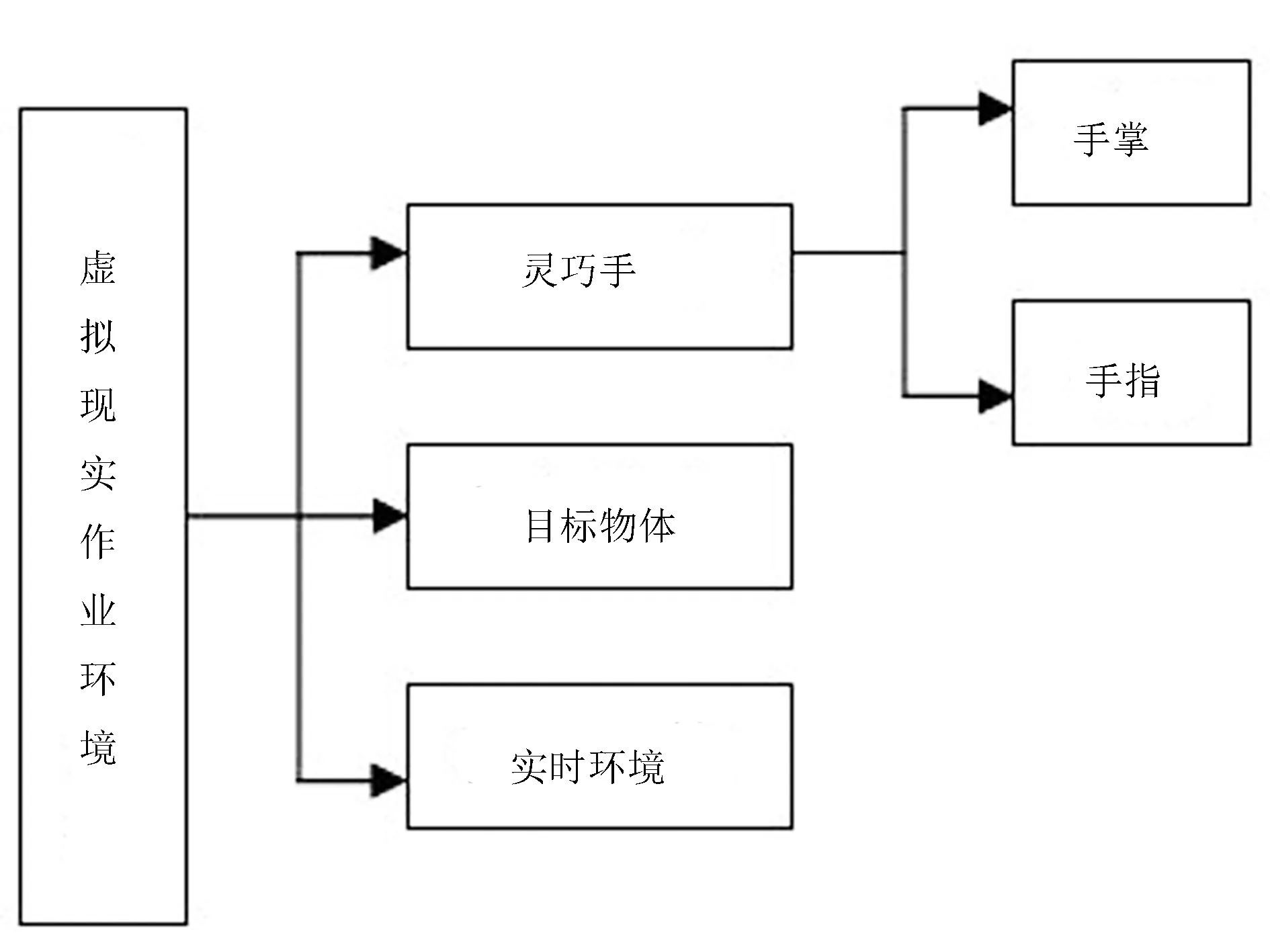
圖6 靈巧手虛擬現實環境建模結構圖
為了提高靈巧手虛擬現實操作環境的準確性,確保仿真系統的精確度,虛擬環境建模應該從幾何環境和運動學兩方面建立數學分析模型。本文利用三維仿真軟件3D MAX對虛擬現實平臺各部分模型進行仿真,根據場景物體的大小、形狀、顏色、紋路及空間坐標進行定義,利用Python集成開發平臺和Solidwork中3D數據庫,將它們按運動學關系設計成新的整體構件。在組建新的構件過程中,定義構件的自由度、平移、移動速度等特性,并將整個虛擬環境的坐標原點定在農業機器人基關節的原點。將農業機器人機械臂、靈巧手掌、靈巧手指進行捆綁定義,讓其形成一個控制鏈,并把作業對象和工作臺加入虛擬現實場景中,使得構建的虛擬場景更具“沉浸性”。SolidWork設計的農業機器人靈巧手示意圖如圖7所示。

圖7 農業機器人靈巧手示意圖
3.2 建立靈巧手運動學數學模型
為了在虛擬現實實驗平臺中對農業機器人靈巧手進行有效的遙操作,建立靈巧手運動學數學模型是必須的。為了讓靈巧手運動學模型清晰易懂,只對其單指結構進行分析。靈巧手單指模型如圖8所示。
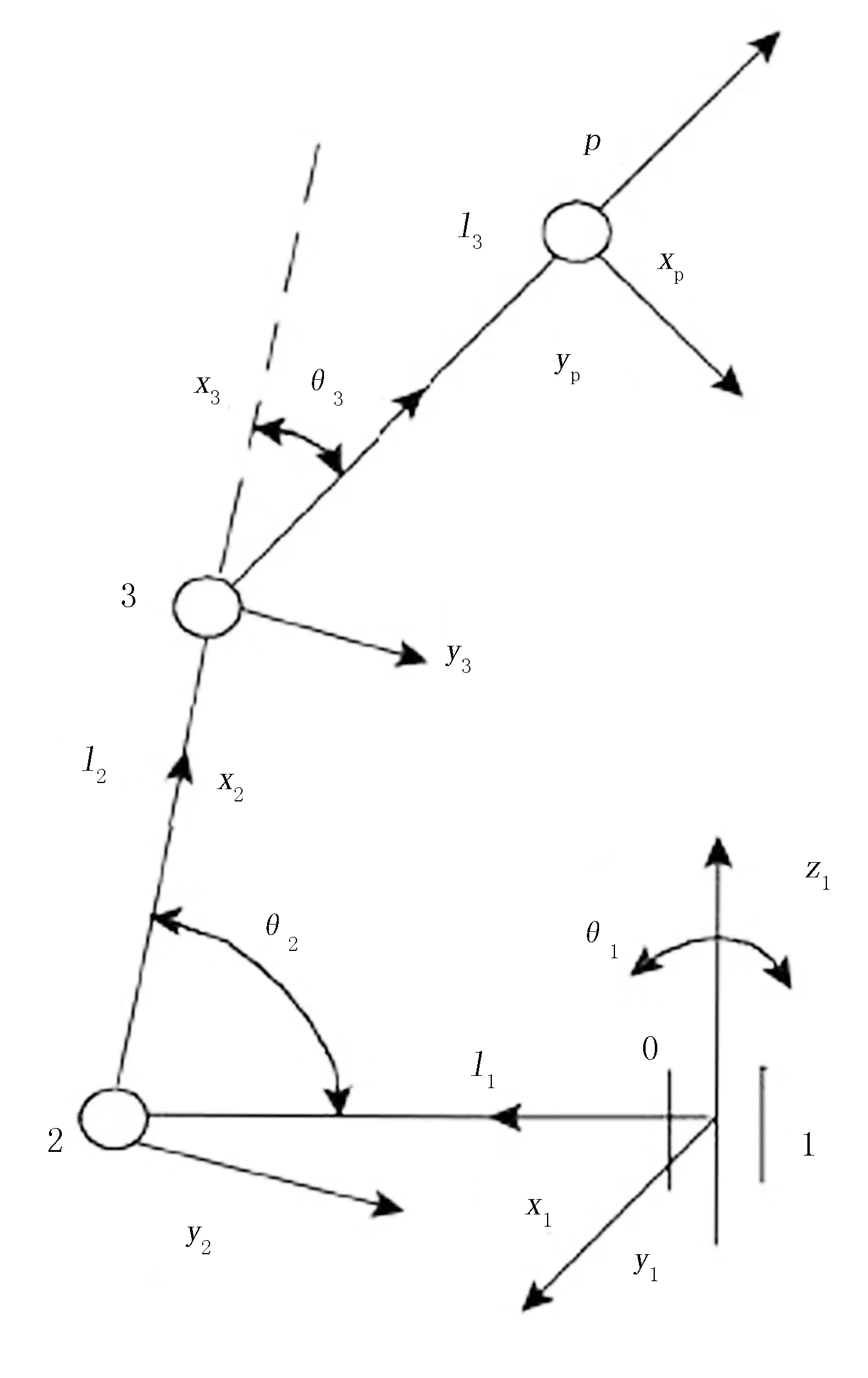
圖8 靈巧手單指模型圖
圖8中,l1為根指關節長度;l2為中指關節長度;l3為端指關節的長度;θ1為x1oy1與繞z1旋轉得到的角度;θ2為x2oy2繞z2旋轉得到的角度;θ3為x3oy3繞z3旋轉得到的角度。
p點在指根坐標系的齊次坐標位置為
(1)
(2)
(3)
(4)
(5)
4 LabVIEW上位機設計與實驗
在整個虛擬現實試驗平臺中,主操作平臺是1臺基于Windows操作系統的計算機。在LabVIEW上位機操作界面中,有虛擬靈巧手的實時顯示,還有作業虛擬場景,實時展示操作的過程。
LabVIEW上位機采用NI公司的LabVIEW軟件進行設計,界面直觀,操作方便。LabVIEW上位機登錄界面前面板和底層圖形程序如圖9、圖10所示。
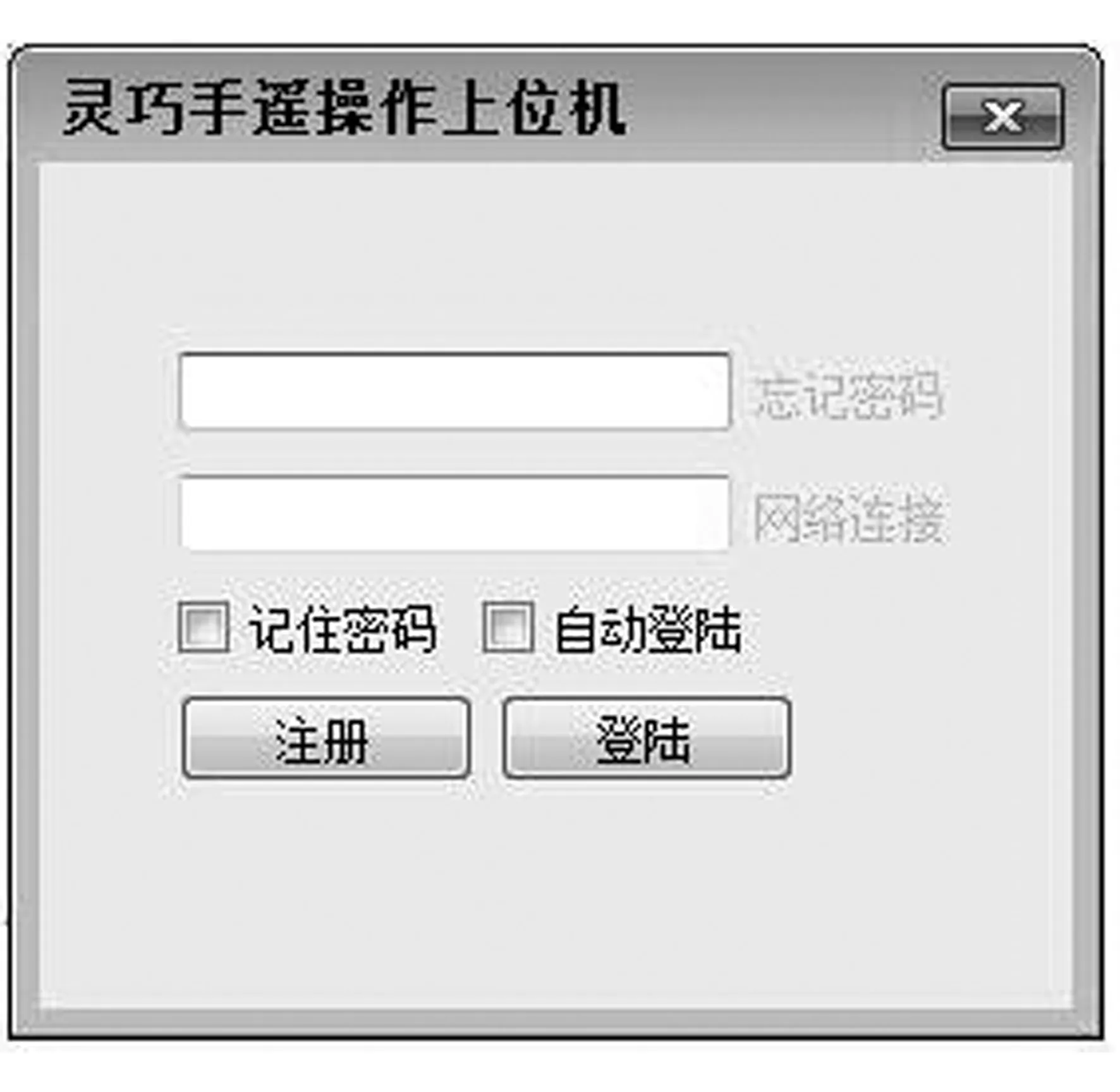
圖9 登錄界面前面板
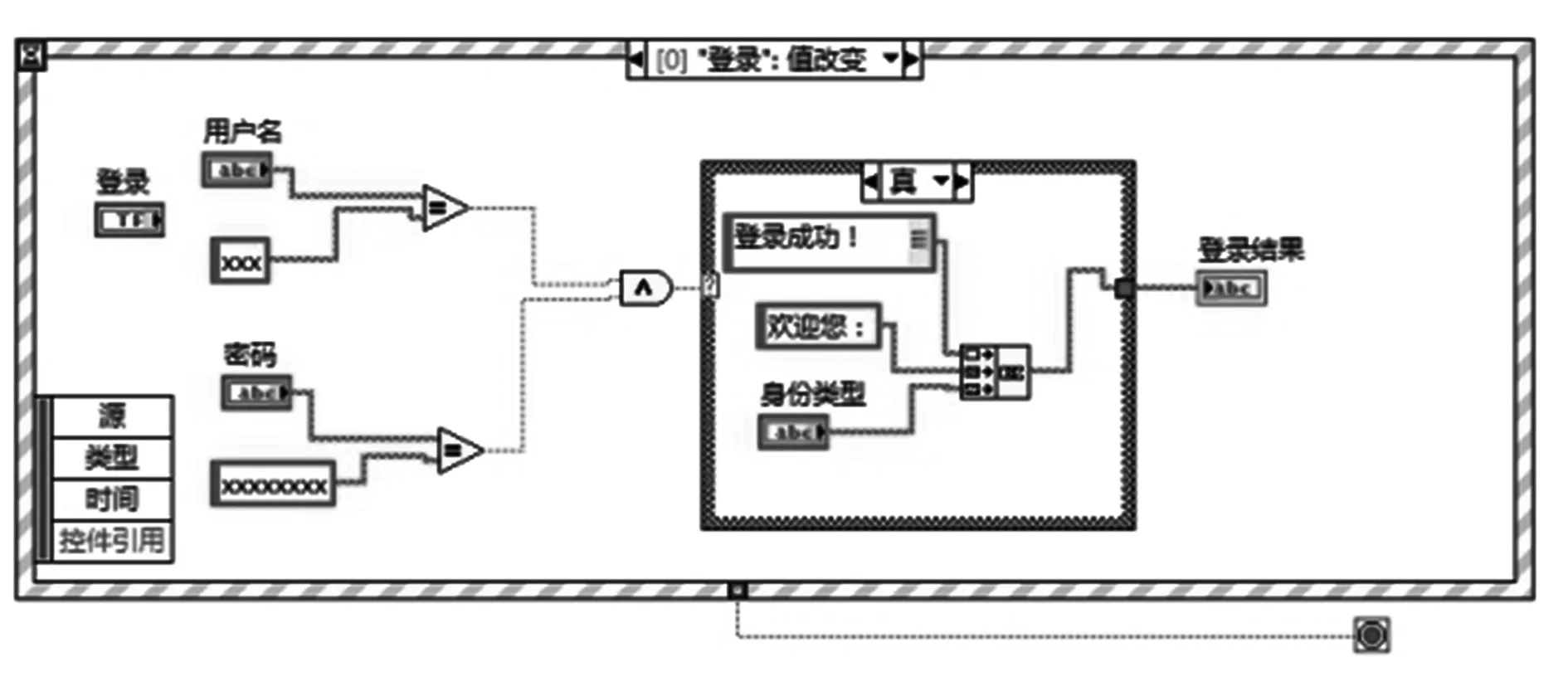
圖10 登錄界面底層圖形程序
為驗證本文設計農業機器人靈巧手遙操作虛擬現實實驗平臺的可靠性,利用LabVIEW上位機對虛擬靈巧手抓物體的特征與位姿進行了實驗分析。根據整個抓取過程的預演,能夠給操作人員進行遙操作采摘果實提供一定的參考線索。實驗中,待抓取物體的尺寸為100mm(長度)×30mm(直徑)的圓柱體。抓取實驗仿真結果如圖11所示。
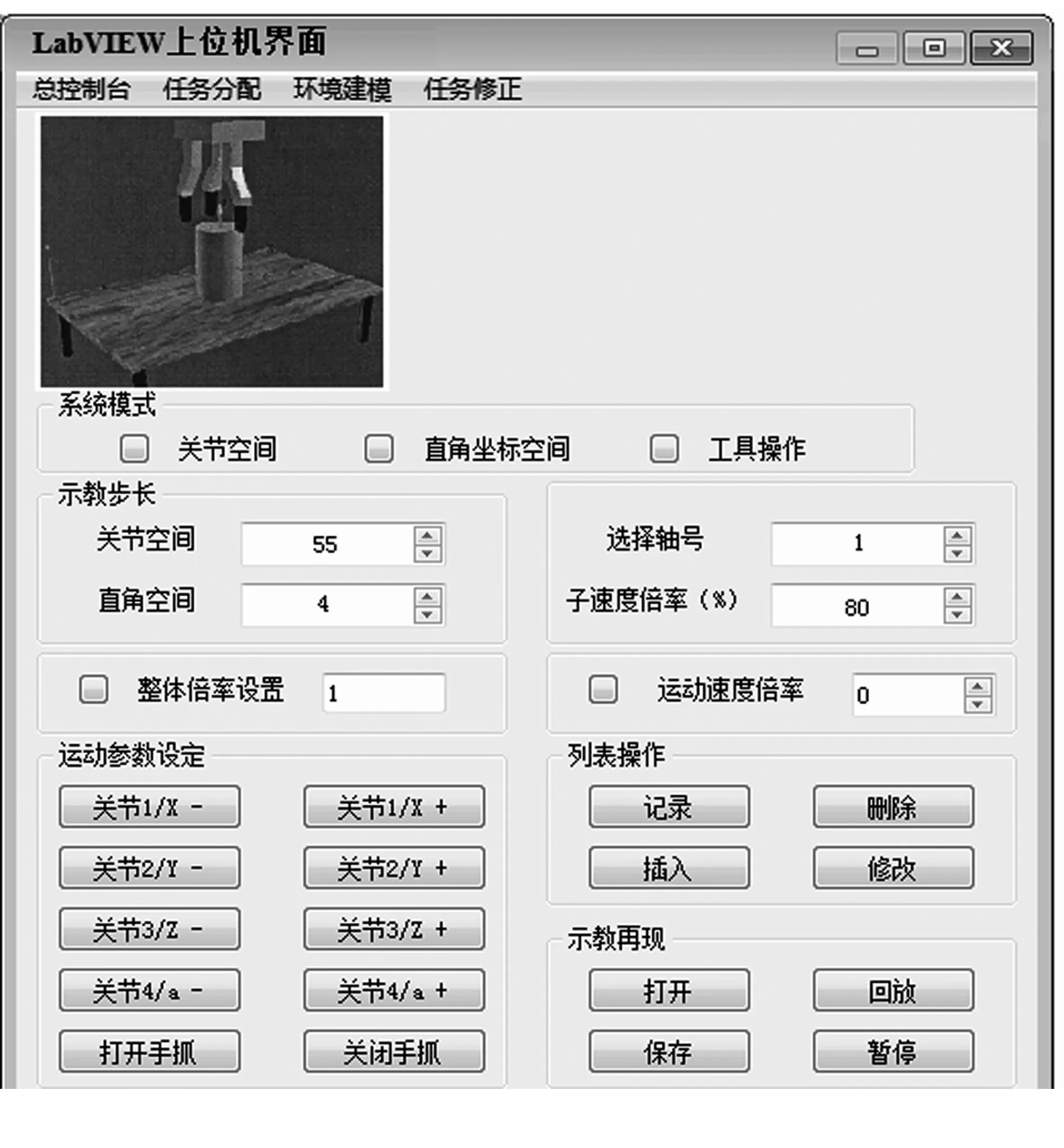
圖11 抓取試驗仿真結果圖
由圖11可以看出:農業機器人靈巧手可以準確抓取物體,且在整個過程中沒有和其他物體發生碰撞。
5 結論
本文首先分析了虛擬現實技術的概念、應用領域及整個系統的組成架構;然后,對農業機器人靈巧手遙操作平臺的軟硬件進行了分析設計,進而搭建農業機器人靈巧手遙操作虛擬現實實驗平臺;最后,為了驗證該平臺的可靠性,利用LabVIEW上位機對虛擬靈巧手抓物體的特征與位姿進行了實驗分析。結果表明:農業機器人靈巧手能夠根據物體大小精準地抓取物體,可以滿足農業機器人采摘作業要求。
猜你喜歡
今日農業(2022年1期)2022-11-16 21:20:05
今日農業(2022年3期)2022-11-16 13:13:50
今日農業(2022年2期)2022-11-16 12:29:47
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
今日農業(2021年14期)2021-11-25 23:57:29
今日農業(2021年13期)2021-08-14 01:38:18
今日農業(2020年15期)2020-12-15 10:16:11
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
故事大王(2016年7期)2016-09-22 17:30:08