“8”字形無碳小車軌跡分析及結構設計
2018-08-08 08:19:12劉蒙霖
中國設備工程 2018年15期
關鍵詞:設計
劉蒙霖
(重慶交通大學 機電與車輛工程學院,重慶 400074)
競賽要求無碳小車以1千克重的標準砝碼的重力勢能為驅動,不得使用其他形式的動力來源;具有自動轉向功能并且轉向機構可調,適用于各種場地;自主設計結構參數并選材制作;小車為三輪結構,一個輪子為轉向輪,兩個輪子為行走輪;能夠精確繞一定距離的兩個障礙物以“8”字形軌跡運動,不出界,不撞倒障礙物。
1 軌跡設計
本文根據競賽要求對小車的行駛軌跡進行了具體設計,特別是轉向的設計,得到了結構的部分設計參數。設計軌跡如圖1。
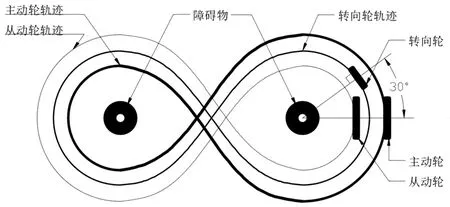
圖1 無碳小車軌跡圖
圖1中最粗實線是主動輪軌跡,相當于車身的一個參考邊界,軌跡是一大一小兩個圓弧(相當于“8”字形)加上轉向圓弧軌跡;較粗實線是轉向輪的軌跡,為了提高轉向的靈活性,安裝在車身軸線上,所以其軌跡是兩個等大的圓弧,理論上轉向輪可安裝在兩個行走輪之間任意位置,那么其軌跡也隨之改變為一大一小的“8”字形;細實線為從動輪的軌跡,其與主動輪正好相反,兩者時刻平行,相互交替,同時作為車身的另一個參考邊界。
車身參考邊界要嚴格控制,車身尺寸要與軌跡結合設計,如圖1所示,主動輪與從動輪之間的平行間距決定了實際車體的主動輪與從動輪的間距,根據主、從動輪的間距設計出車身寬度,由此得到車身邊界,根據邊界合理控制車身與障礙物間距。如果精度允許,可取小間距,否則軌跡會出現誤差,碰倒障礙物的概率越大。主動輪作為最小邊界時是在軌跡的左邊,當小車轉向,運行到另外一側時,主動輪交替成為最大參考邊界,從動輪成為最小參考邊界。在設計車體結構時要同時考慮車身兩邊的邊界與障礙物的間距,軌跡越小,小車理論運行的“8”字形個數越多,同時對小車的設計、制作精度要求越高。轉向角度對軌跡大小也有影響(轉向輪與車身軸線的夾角),夾角越大軌跡越小,周期里程越短,夾角越小,則情況反之。本機構設計夾角為30°,理論上夾角應在90°以內,實際一般在45°以內。
2 主動輪輪徑與轉向次數的設計
當軌跡和傳動比后確定后,就可據此設計主動輪尺寸、車身尺寸與轉向角度。根據圖1可知:小車運行一圈,轉向兩次。不完全此輪設計為3齒3組,不完全齒輪運行一周,可以驅動轉向機構轉向3次,每次參與驅動轉向的齒數較少,是為了保證轉向迅速可靠。主動輪驅動齒輪與不完全齒輪同軸,保證了主動輪旋轉1圈,不完全齒輪也同步旋轉1圈并驅動轉向3次,小車應該運行1.5個“8”字形,同時根據主動輪旋轉1圈知:主動輪的周長應該等于1.5個“8”字的軌跡里程,從而可確定主動輪的輪徑。設計完成后的小車結構三視圖如圖2。
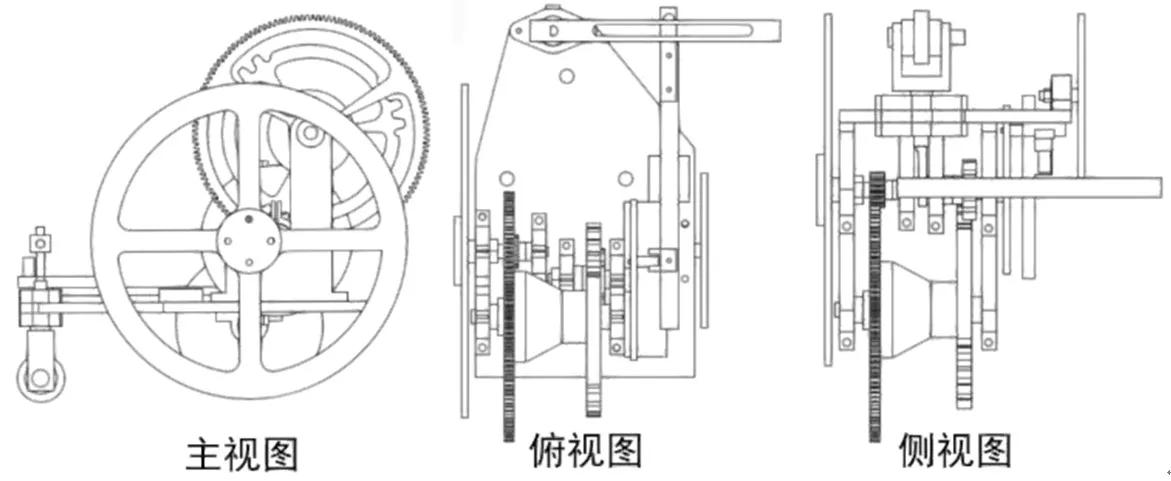
圖2 小車結構三視圖
3 誤差分析與優化設計
對于軌跡的調節,本文設計了一種帶有刻度條的連桿,可以通過調節連桿的螺栓的長度來調節轉向輪的轉向角度;同時,還設計了轉向刻度盤,通過調節刻度盤也可控制轉向。兩者共同調節,可得不同的軌跡組合,能夠滿足一般軌跡變化需要。
此外,在實驗過程中,軌跡出現周期性誤差,與設計、制作精度無關,通過調節轉向機構可修正,是轉向時的軌跡造成的誤差。這種誤差在這種不完全齒輪機構中不可避免,但可通過巧妙設計而避免。本文設計的不完全齒輪與主動輪驅動齒輪同軸,兩者同步轉動,在轉向時主動輪也同樣行駛對應里程,與時間無關,無法通過迅速轉向避免,這是由最初設計就決定的。本機構設計的齒數較少,對應的誤差行程也就較短,通關過調整基本可以彌補誤差。為了優化這種結構,可把主動輪驅動齒輪也設計成為不完全齒輪,與控制轉向不完全齒輪工作時間正好相反,兩者模數、齒數完全一致,配合設計減速機構,在小車轉向時制動,使小車停車轉向,如此就可彌補設計上的缺陷,從根源解決軌跡周期誤差。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
