F1807 1/2-1寸管閥全自動裝袋機手部結構設計
2018-08-08 08:19:12查昭
中國設備工程 2018年15期
關鍵詞:設計
查昭
(浙江萬得凱流體設備科技股份有限公司,浙江 臺州 317609)
1 設計注意問題點
1.1 夾緊力是否符合要求
首先考慮包裝的產品重量,防止夾緊力小于工件的重量,同時考慮操作過程中的振動和慣性力,以保證工件不會出現滑脫落。
1.2 各手指之間啟閉角度是否符合要求
兩手指在開啟與關閉的角度應重點考慮,保證工件能夠夾得住,能夠進入包裝袋中,還要能在松開時有足夠的空間移動,所以設計時要考慮按照1寸規格的最大工件外徑進行計算。
1.3 確保工件的定位尺寸
手指進行抓取動作時,工件的外型定位尺寸要盡可能的一致,在生產時,要確保都在合理的公差范圍內,這樣手指的V型面自動定心,夾持穩定性將得到保證。
1.4 手指強度和剛度考量
工件的自身重量、設備運行中振動、行走過程中的一系列的慣性沖擊力,都會對手指造成影響,因此,我們在機器設計壽命上要做好充分的考量,強度和剛度就要做充分的計算,盡可能讓手指具有結構簡單、自重輕和扭轉力矩小的特點。
2 手部結構設計與計算
2.1 手部采用夾持式結構
手部結構多種多樣,本文采用夾持式手部結構,主要由手指和傳力機構所組成。雖然手指的形式和傳力形式靈活多變,但對于F1807系列的較輕的產品都是可以滿足設計要求的。因此我們采用氣動機械手結構,如圖1所示。
2.2 針對驅動力的計算
經統計,1寸規格的產品最大的重量不超過3公斤,所以我們按照G=5公斤進行設計計算。
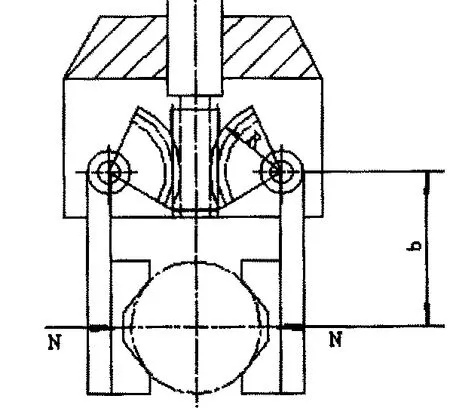
圖1 手部形狀示意圖
最后手指夾緊力計算式為:
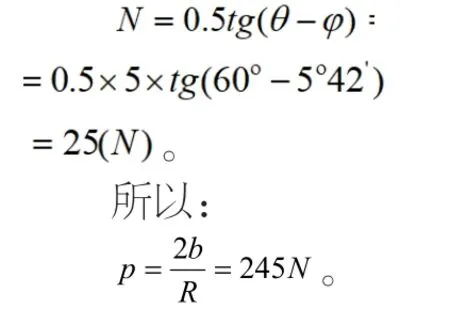
2.3 針對夾緊氣缸驅動力的計算
本課題中傳力機械中由齒輪齒條傳動,因此取η=0.94,并取K1=1.5。我們在設計時考慮最大的抓取工件加速度取a=3g時,則:

我們就可以計算出夾緊氣缸需要的驅動力為1536N。
2.4 單向作用氣缸的直徑計算
本氣缸采用單向作用氣缸。因此要考慮到活塞桿推力中彈簧的反作用力的總阻力,查手冊公式為:
式中:F1為活塞桿上的推力,N;Ft為彈簧反作用力,N;Fz為氣缸工作時的總阻力,N;P為氣缸工作壓力,Pa。
彈簧反作用按下式計算:
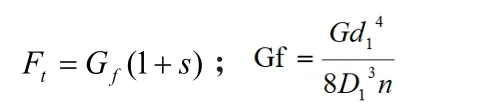
式中:
Gf為彈簧剛度,N/m;1為彈簧預壓縮量,m;s 為活塞行程,m;d1為彈簧鋼絲直徑,m;D1為彈簧平均直徑,m;n 為彈簧有效圈數;G為彈簧材料剪切模量,一般取
代入有關數據,可得:
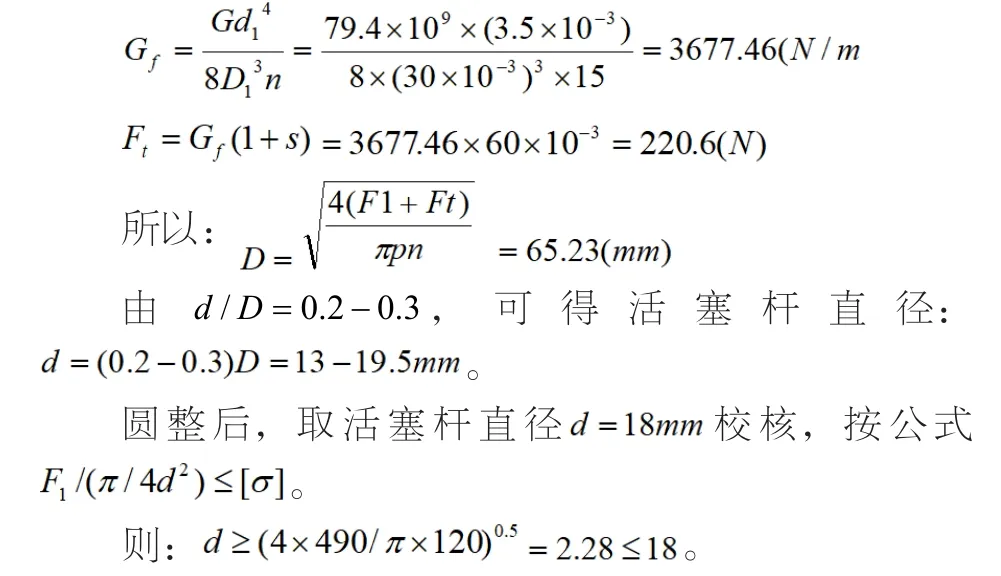
滿足了實際設計要求。
3 手腕結構設計與計算
3.1 手腕的靈活自由
手部與手臂連接時最重要的部件就是手腕,它可以使工作進行自由的調整方向與位置,使原有的呆板的機械手實現可以運行復雜的動作,對于1/2-1寸各類規格的,且形狀各異的零部件來說,機械手的通用性問題就能很好的解決。所以本設計中將夾抓的工件始終保持水平,給手腕增加回轉運動的機構,且選用密封性良好的回轉氣缸。如圖2所示。
3.2 手腕的驅動力的計算
手腕進行上下、左右、前后的擺動,驅動力矩必須克服手腕慣性力矩、摩擦阻力矩、轉動軸線不重合所產生的偏重力矩等這些因素,所以需查手冊進行詳細的計算。
手腕轉動時所需的驅動力矩可按下式計算:

手腕慣性力矩可按下式計算:
夾持產品與手臂造成的偏重按下式計算:

摩擦阻力矩的可按下式計算:

我們根據實現產品的最大尺寸進行驗核,最后將氣缸長度設計為100mm,內徑為96mm,軸為26mm,氣缸運行角度為90°/s,加速 0.1s,壓強 0.4MPa,進行計算后為32.6N·m。

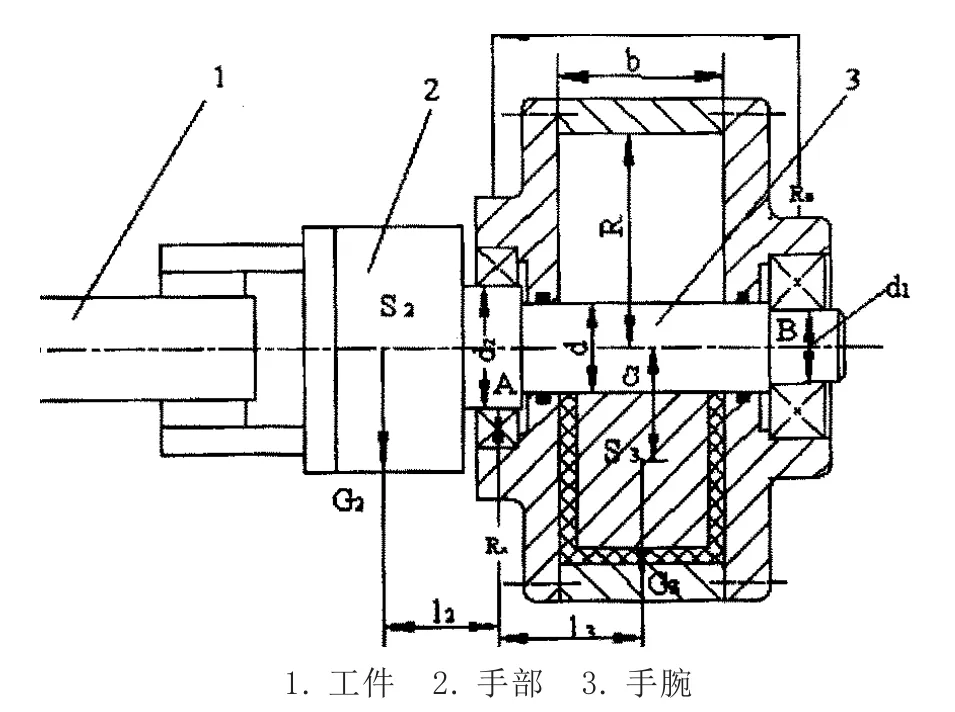
圖2 手碗回轉時受力狀態
按照實際測量的工件重量、手臂、手腕自重、以及偏重、慣性力矩等相加后計算出M驅=29N·m。

設計尺寸符合特定產品的使用要求,安全。
4 結語
經對手部與手腕的結構進行設計,并對各夾緊、驅動、回轉等進行計算,針對F1807 1/2-1寸無鉛管件全自動裝袋機使用了氣動機械手,手部與手腕需要完成伸縮、升降、回轉、橫移等功能,就應分別對這些機構進行設計和計算,對包裝的重量進行考慮,防止制造的設備無法滿足實際包裝產品多種狀態下的需求。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
