基于拓撲優化的工業機器人結構設計*
2018-08-07 09:46:16吳立華康國坡李克天
機電工程技術 2018年7期
吳立華,白 潔,康國坡,李克天
0 引言
工業機器人經歷多年發展,逐步朝著高精度、高速度發展,不但對工業機器人的控制提出了更高的要求,也對機器人的機械結構提高出了更高的要求,不僅要輕量化而且要具有足夠的強度、剛度和具有較好的動態特性,這些相互沖突的目標,即為當下常見的多目標優化問題。
在結構優化方面,拓撲優化有著非常廣泛的應用,拓撲優化是研究在給定的設計區域內尋求材料最優分布的問題,而將多目標的問題如何轉化為單目標問題是當前的多目標拓撲優化基本方法和研究重點,目前國內有不少人開展了相關研究。饒柳生[1]等采用了一種通過折衷規劃法和功效函數法轉化而成的多目標拓撲優化方法改進了機床立柱的設計,張志飛[2,3]等針對汽車懸架控制臂進行了多目標的拓撲優化研究,提出一種基于折衷規劃法歸一化子目標建立綜合目標函數、以灰色綜合關聯分析確定綜合目標函數中子目標權重系數的方法。許輝煌[4]等將利用線型加權的多目標的拓撲優化應用在工業機器人的結構設計中。姚濤[5]等利用分析層級法確定多目標各子目標權重,將多目標問題成功的轉化為單目標的問題。
本文選用某企業額定載重為6 kg的商用工業機器人本體的大臂作為分析對象,采用多目標的拓撲優化方法,通過動力學分析獲得大臂在整個工作空間內的極限載荷,選擇結構剛度和前幾階固有頻率的提高作為優化目標。
1 大臂的結構與特性分析
1.1 結構說明
在串聯型工業機器人(如圖1所示)的結構中,大臂承擔了機器人了肩部、小臂、腕部和負載全部重量,且其結構為細長型,與其他部件對比,其剛度和動態特性對末端執行機構精度影響較大,對其剛度和動態特性要求高。
1.2 強度分析和模態分析
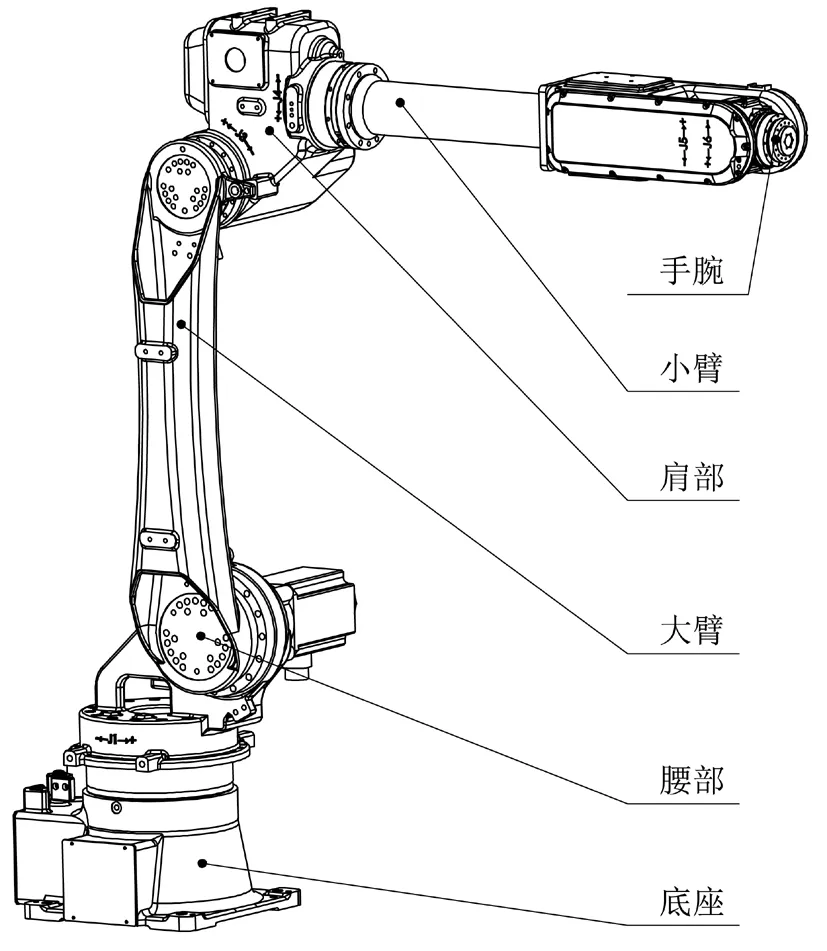
圖1 工業機器人CAD模型
工業機器人在實際運行中,下端和腰部相連,上端與肩部相接承受扭矩和力。在整個工作空間內利用動力學分析,獲得某型號工業機器人大臂在典型極端工況下關節的峰值力和峰值扭矩[6],用作下一步強度分析的受力邊界條件。
建立大臂的有限元模型,對大臂進行靜力學分析,結果如圖2、圖3所示。
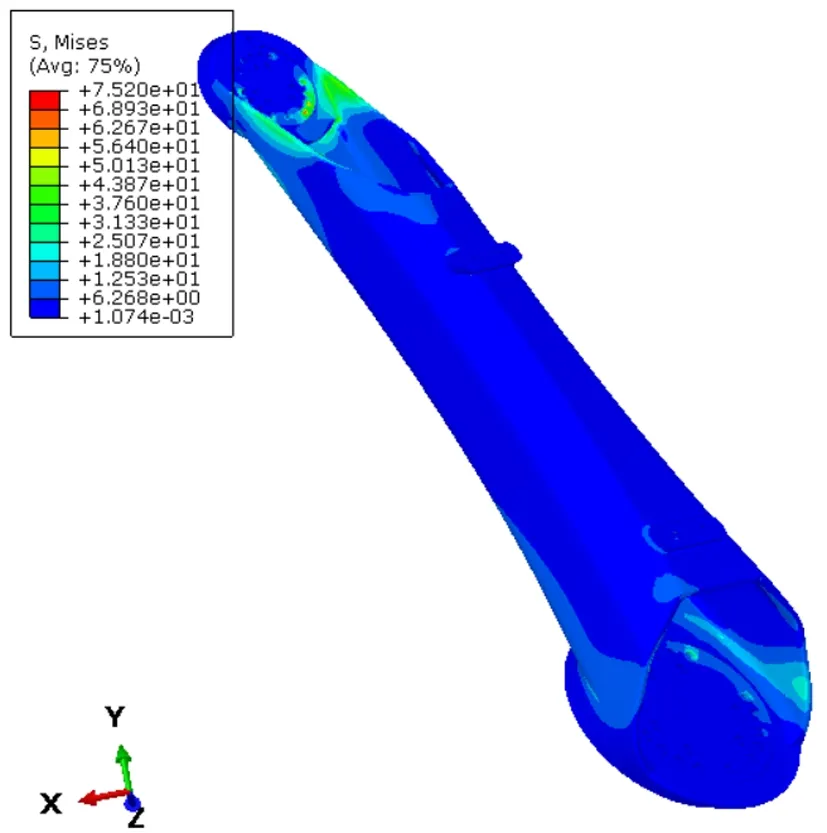
圖2 大臂應力圖
分析結果表明,大臂的最大變形是0.42 mm,最大應力是75.2 MPa。強度滿足要求,但是其變形較較大,剛度較弱,影響機器人的整體的動態性能和末端的精度,因此下一步目標是進行提高剛度的優化設計。
在大臂下端固定的情況下對其進行模態分析,高階模態對結構震動的影響較小,只關注其低階前6階模態,如表1所示。提高低階固有頻率有利于改善結構的動態特性,提升機器人的定位精度。

圖3 大臂位移圖
2 大臂拓撲優化
2.1 多目標優化方法
折衷規劃法比較適合用于優化目標屬性不同的優化問題,其思路是把多目標優化問題折衷為與每個目標函數的理想最優解誤差最小的矢量,消除不同屬性或同屬性不同量級的影響,從而完成將多目標問題轉化為單目標問題。綜合考慮極限工況下的結構剛度和固態固有頻率,最終得到帶權重系數的折衷規劃法的拓撲優化目標函數[2,+7]。

或

其中:
F(ρ)——綜合目標函數;
m——子目標數目;
ρ——設計變量即材料相對密度;
wk——第k個子目標的權重系數;
Ck(ρ)——第k子目標的目標函數;
p——懲罰因子,一般取p≥2;
2.2 大臂的拓撲優化
根據大臂實際安裝條件(如RV減速器等安裝需求)和受力條件,并對大臂模型的細節處做簡化處理,整個大臂分為拓撲優化區域和非優化區域,如圖4所示。
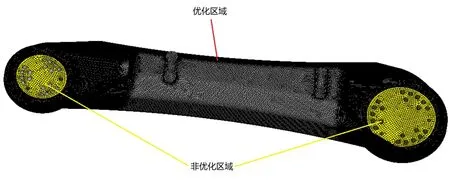
圖4 拓撲優化有限元模型
大臂進行多目標拓撲優化時,根據優化目標的重要程度,取剛度目標權值0.4,頻率目標權值0.3,質量目標權值0.3,通過自定義函數功能編寫多目標函數后借助Hyperworks軟件中Optistruct求解器進行結構拓撲優化求解,經過14次迭代目標函數收斂,拓撲優化后的模型如圖5所示。
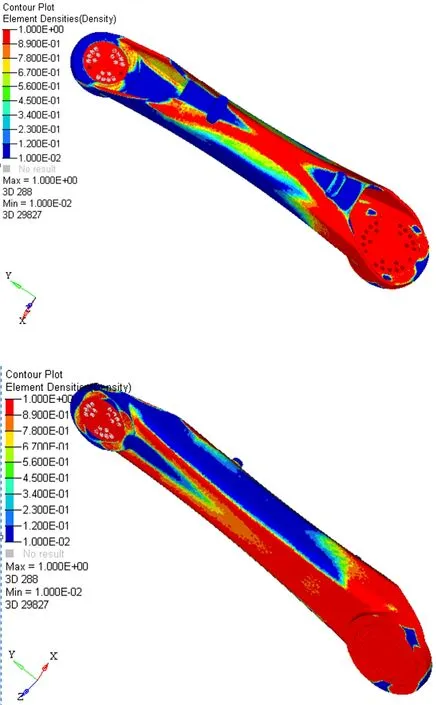
圖5 拓撲優化后的模型
從圖5可以看出,紅色區域主要集中在大臂的兩端以及中間底板部分,其中間藍色區域可以考慮去除。其他如大臂與肩部連接處的不規則小孔,可根據實際需要考慮是否去除。
2.3 大臂的改進設計與分析
參考多目標優化后的大臂材料分布云圖和結構的加工工藝并忽略細小孔洞[8],在中間兩側腹板開槽口,在與底座相近的大臂增加2個加強筋,提高其剛度,改進后的結構如圖6所示。
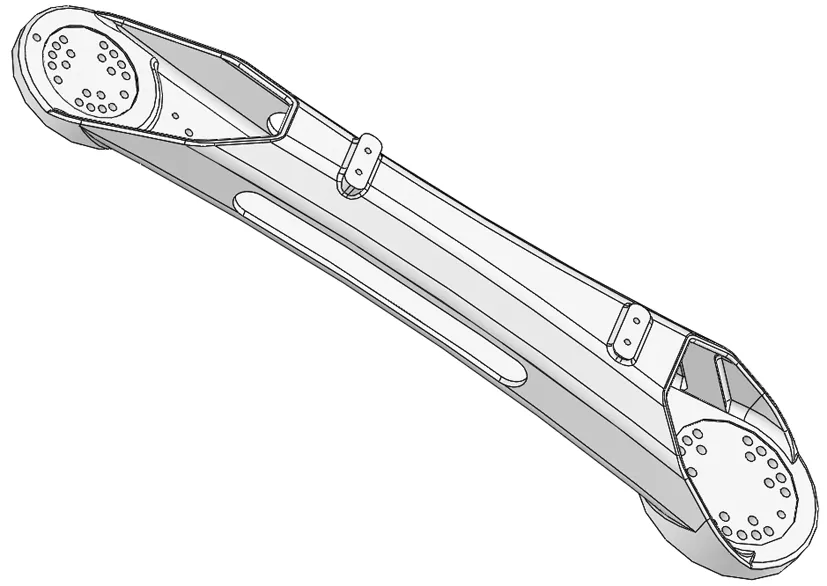
圖6 優化后的大臂結構
改進后的大臂質量為22.28 kg,比原結構降低約6.7%;對其進行結構分析和模態分析,結果表明改進后的大臂各階模態都有一定程度的提高,強度和剛度性能均得到有效改善,見表1、表2。
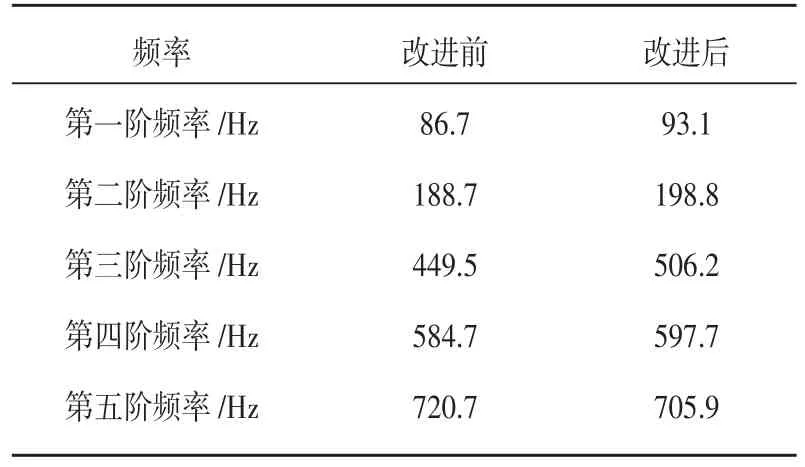
表1 大臂改進前后動態特性對比表
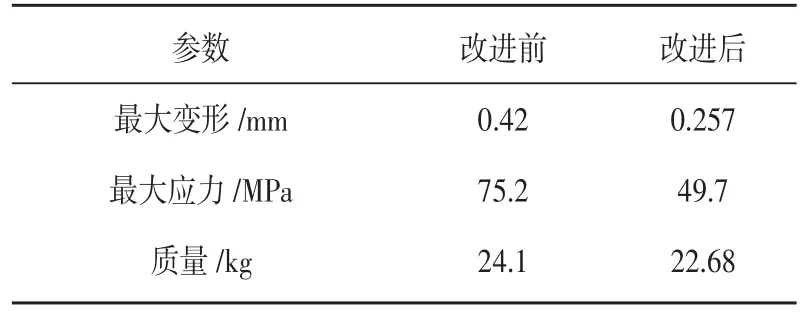
表2 大臂改進前后靜態特性對比表
3 小結
本文提出了一種多目標的拓撲優化方法,并以某商用工業機器人的薄弱零件(大臂)為例,運用該方法進行了多目標拓撲優化,優化結果顯示大臂的剛度、強度性能明顯增強,固有頻率均有不同程度提高,輕量化效果明顯。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
哲學評論(2021年2期)2021-08-22 01:53:34
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中華詩詞(2019年7期)2019-11-25 01:43:04
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
現代企業(2015年9期)2015-02-28 18:56:50
上海電機學院學報(2015年4期)2015-02-28 14:30:00