基于VB A的輸送機(jī)通過性研究及應(yīng)用
2018-08-04 07:19:48陳剛
裝備制造技術(shù) 2018年6期
關(guān)鍵詞:分析
陳 剛
(湖北迪邁威智能裝備有限公司研發(fā)部,湖北 武漢430000)
0 引言
VBA是Microsoft公司開發(fā)的,該應(yīng)用程序(如Word、Excel、Access、Powerpoint等)共享一種通用的自動(dòng)化語(yǔ)言,具有高效、靈活且一致性跨越多種應(yīng)用軟件并且具有控制應(yīng)用軟件對(duì)象的能力。AutoCAD VBA允許Visual Basic環(huán)境與AutoCAD同時(shí)運(yùn)行,并通過ActiveX Automation接口提供AutoCAD的編程控制。這樣就把 AutoCAD、ActiveX Automation和VBA鏈接在一起,提供了一個(gè)功能非常強(qiáng)大的接口。它不僅能控制AutoCAD對(duì)象,也能向其他應(yīng)用程序發(fā)送數(shù)據(jù)或從中檢索數(shù)據(jù)。
ActiveX Automation是一套微軟標(biāo)準(zhǔn),該標(biāo)準(zhǔn)允許通過外顯的對(duì)象由一個(gè)Windows應(yīng)用程序控制另一個(gè)Windows應(yīng)用程序,這也是面向?qū)ο缶幊碳夹g(shù)的精髓所在。AutoCAD從R14開始增加了作為ActiveX Automation服務(wù)器應(yīng)用程序的功能,使得許多面向?qū)ο缶幾g語(yǔ)言和應(yīng)用程序可以通過ActiveX與AutoCAD進(jìn)行通信,并操縱AutoCAD的許多功能。ActiveX Automation技術(shù)將AutoCAD的各種功能封裝在AutoCAD ActiveX對(duì)象中,供編程使用。ActiveX Automation技術(shù)的完全面向?qū)ο蠡幊痰奶攸c(diǎn),使其開發(fā)環(huán)境具備了強(qiáng)大的開發(fā)能力和簡(jiǎn)單易用的優(yōu)良特點(diǎn),開發(fā)工具的選擇也具有很大的靈活性[1]。
輸送機(jī)包括空中懸掛輸送機(jī)和地面輸送機(jī),本文所敘述的對(duì)象主要是必須做通過性分析的空中懸掛輸送機(jī),如空中摩擦線、普通懸鏈、推桿懸鏈等,以及臺(tái)車類的地面輸送機(jī),如AGV(自動(dòng)引導(dǎo)小車)、RGV(軌道引導(dǎo)臺(tái)車)等。對(duì)直線運(yùn)行的輸送機(jī)做通過性分析不需要借助其他工具,直接觀察并可以得出結(jié)論,但是在輸送軌跡的彎段區(qū)域,需要通過作圖法或者借助其他工具來進(jìn)行通過性分析。本文提供了一種簡(jiǎn)潔便利的通過性分析方法,能對(duì)輸送軌跡的彎段區(qū)域快速繪制通過性包絡(luò)圖,從而快速可靠地進(jìn)行通過性分析。
1 輸送機(jī)通過性分析的基本方法
通過性分析是指運(yùn)動(dòng)物體通過預(yù)定路徑的能力,針對(duì)輸送機(jī)而言,就是分析車組吊具(或臺(tái)車)載著工件沿固定軌道運(yùn)行時(shí),是否與其他輸送設(shè)備、工藝網(wǎng)架、安全護(hù)欄等發(fā)生干涉。目前,最常用的方法是繪制包絡(luò)圖,即運(yùn)動(dòng)物體在沿其軌道運(yùn)行時(shí),繪制出其所有瞬間位置的影像。通過觀察包絡(luò)圖,便能直觀判斷輸送機(jī)是否滿足通過性要求。另外一種方法為通過動(dòng)態(tài)模擬來觀察,但由于軟件功能的限制,很少被應(yīng)用。
傳統(tǒng)繪制包絡(luò)圖的方式,大多以手工操作Auto-CAD基本命令繪制包絡(luò)圖為主,工作量比較大,需要花費(fèi)大量的時(shí)間,圖形越密集可操作性越差,圖形越稀疏準(zhǔn)確度越差。因此,為更快速更準(zhǔn)確地進(jìn)行通過性分析,通過基于ActiveX技術(shù)的AutoCAD二次開發(fā)工具VBA編程來實(shí)現(xiàn)包絡(luò)圖的繪制,由于整個(gè)繪制過程是由計(jì)算機(jī)來繪制的,可以將包絡(luò)圖繪制的更密集一些,這樣通過性分析的準(zhǔn)確度越高,并且還可以記錄吊具(或臺(tái)車)上平衡輪(或者牽引銷)中心點(diǎn)在每個(gè)影像上的坐標(biāo),通過連接這些點(diǎn)的曲線來擬合吊具(或臺(tái)車)的扶正軌的形狀。另外,還可以通過VBA編程實(shí)現(xiàn)輸送機(jī)的動(dòng)態(tài)模擬來進(jìn)行通過性分析,這樣更直觀,但不能保存分析結(jié)果。
2 基于VB A的輸送機(jī)通過性分析系統(tǒng)的實(shí)現(xiàn)
2.1 繪制包絡(luò)圖
在系統(tǒng)實(shí)現(xiàn)之前,首先必須對(duì)AutoCAD圖形信息做一些簡(jiǎn)單的處理,方便系統(tǒng)獲取AutoCAD圖形信息,稱之為前處理;然后,進(jìn)行必要的人機(jī)交互處理,即讓系統(tǒng)獲取AutoCAD圖形信息和輸入相關(guān)參數(shù);最后,通過幾何結(jié)構(gòu)分析進(jìn)行必要的圖形處理,得到所需要的圖形。
2.1.1 前處理
首先,要將AutoCAD圖形中輸送機(jī)的輸送路線繪制成一條多段線,多段線是由一系列直線和圓弧線組成的線形;然后,在AutoCAD模型空間中將通過性分析的對(duì)象(如吊具、工件等)編輯成塊(block),如果分析對(duì)象中的部件在運(yùn)行過程中有相對(duì)運(yùn)動(dòng),則必須將這些部件單獨(dú)編輯成塊。所以,前處理之后的分析對(duì)象,可能是一個(gè)塊,也可能是多個(gè)塊。
本文中分析的是某汽車制造企業(yè)總裝車間底盤輸送線(見圖1),該輸送線采用空中摩擦線和懸掛輸送鏈結(jié)合的方式,在底盤裝配工藝段采用懸掛輸送鏈輸送,其他輸送段采用空中摩擦線輸送。由于裝配工位的標(biāo)高較低,所以空中摩擦線和懸掛輸送鏈的轉(zhuǎn)接段都處在輸送線的垂直彎段上(上坡或下坡),而在吊具和工件在垂直彎段上運(yùn)行時(shí)必須保證工件一直處于水平狀態(tài)(見圖2),這樣要求設(shè)計(jì)一條扶正軌托住吊具,使得吊具內(nèi)部部件在下坡過程中有相對(duì)位移。
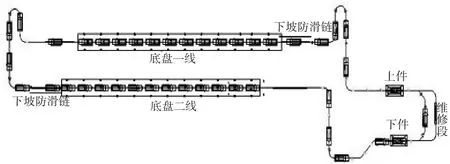
圖1 底盤輸送線
2.1.2 人機(jī)交互處理
ActiveX對(duì)象模型中提供了多種提示用戶輸入的方法,包括 GetReal、GetPoint、GetEntity、GetString、GetKeyword和GetInteger等[2],通過GetEntity方法可以獲取輸送軌跡線和車組吊具中的塊,通過GetPoint方法可以獲取各個(gè)塊上的點(diǎn)的坐標(biāo)(兩個(gè)點(diǎn)確定塊的位置),通過GetReal方法可以獲取在AutoCAD命令行鍵入的包絡(luò)圖中影像的數(shù)量及節(jié)距等參數(shù)。
如圖3底盤線車組吊具,由前車組2、懸掛梁3、后車組4和吊具6組成(其它不影響通過性分析的零部件忽略),在下坡運(yùn)行過程中它們之間都有相對(duì)位移,因此在前處理時(shí)應(yīng)將該車組吊具編程成4個(gè)不同的塊。在人機(jī)交互輸入時(shí),每一個(gè)塊都要用GetEntity方法利用鼠標(biāo)從AutoCAD模型空間獲取,而且每個(gè)塊上有2個(gè)懸掛點(diǎn),通過GetPoint方法獲取,為各個(gè)塊的初始位置點(diǎn)。
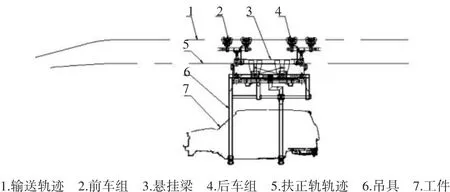
圖3 底盤線車組吊具
2.1.3 技術(shù)方案分析
由于車組吊具在從直段到坡段的運(yùn)行過程中,前車組、懸掛梁、后車組和吊具的相對(duì)位置是不斷變化的,要找出它們位置變化的規(guī)律,通過程序計(jì)算其位置點(diǎn)的坐標(biāo),然后通過循環(huán)迭代的方法,得到包絡(luò)圖影像中所有部件的位置點(diǎn)。下面介紹一個(gè)循環(huán)過程中,車組吊具各部件的動(dòng)作過程。
前車組的懸掛點(diǎn)始終沿輸送軌跡運(yùn)行,由函數(shù)AddArc()得到以前懸掛點(diǎn)P1為圓心節(jié)距t為半徑的圓,再由函數(shù)IntersectWith()得到該圓與輸送軌跡線的交點(diǎn),靠近運(yùn)行方向的交點(diǎn)為前車組第一個(gè)懸掛點(diǎn)新的位置坐標(biāo)點(diǎn)P01,以P01為圓心,兩懸掛點(diǎn)的間距R為半徑作圓,再由函數(shù)IntersectWith()得到該圓與輸送軌跡線的交點(diǎn),遠(yuǎn)離運(yùn)行方向的交點(diǎn)為前車組第二個(gè)懸掛點(diǎn)新的位置坐標(biāo)點(diǎn)P02,然后用函數(shù)move()將前車組從P1點(diǎn)平移到P01點(diǎn),用函數(shù)AngleFromXAxis(P01,P02)計(jì)算前車組傾斜角,用函數(shù)rotate()將前車組以P01為旋轉(zhuǎn)中心旋轉(zhuǎn)到新的傾斜角上,如圖4所示。
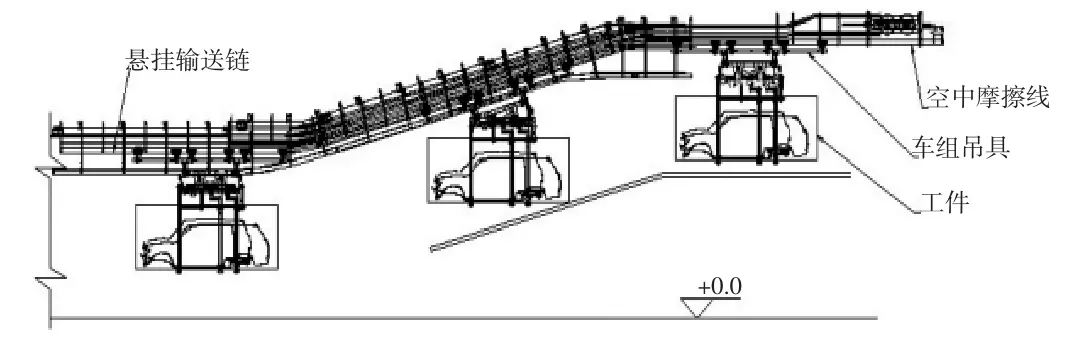
圖2 底盤線下坡段立面圖
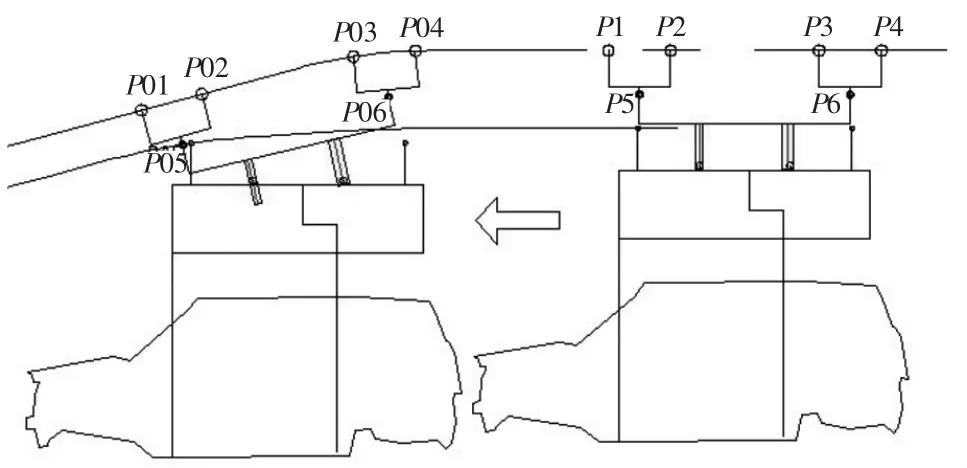
圖4 底盤線車組吊具簡(jiǎn)化圖
后車組、懸掛梁的動(dòng)作過程與前車組基本一樣,不再贅述,不同的是,它們要以前車組為基準(zhǔn),保證移動(dòng)后各個(gè)塊之間的連接點(diǎn)的相對(duì)位置和間距不變。
吊具與其他部件的移動(dòng)方式不一樣,其懸掛點(diǎn)可以在懸掛梁的導(dǎo)槽內(nèi)滑動(dòng),讓它始終保持水平,只需找到其中一個(gè)懸掛點(diǎn)的新坐標(biāo),用函數(shù)move()移動(dòng)到新坐標(biāo)即可,新的懸掛點(diǎn)坐標(biāo)要通過三角幾何分析求得,見圖5吊具的懸掛點(diǎn)局部放大圖。圖中A、B為吊具懸掛點(diǎn)初始相對(duì)位置(可根據(jù)懸掛梁的新位置算出,為已知點(diǎn)),A1、B1為懸掛梁旋轉(zhuǎn)偏移后吊具懸掛點(diǎn)的相對(duì)位置。現(xiàn)在需計(jì)算出A1或者B1的坐標(biāo)值。
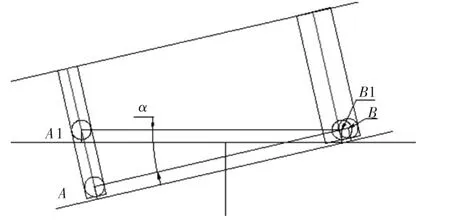
圖5 吊具的懸掛點(diǎn)局部放大圖
如圖5所示有:A1B1=AB,BB1=AB-A1B1×sinα
其中,α為懸掛梁的傾斜角,由函數(shù)Angle-FromXAxis(P05,P06)得到;XB1為 B1點(diǎn)的 X 坐標(biāo);YB1為B1點(diǎn)的Y坐標(biāo);XB為B點(diǎn)的X坐標(biāo);YB為B點(diǎn)的Y坐標(biāo)。
由上述公式計(jì)算可得到B1的位置坐標(biāo),用函數(shù)move()將吊具從B點(diǎn)移動(dòng)至B1點(diǎn),當(dāng)前循環(huán)結(jié)束,進(jìn)入下一個(gè)循環(huán)。
2.1.4 VBA編程實(shí)現(xiàn)[3]
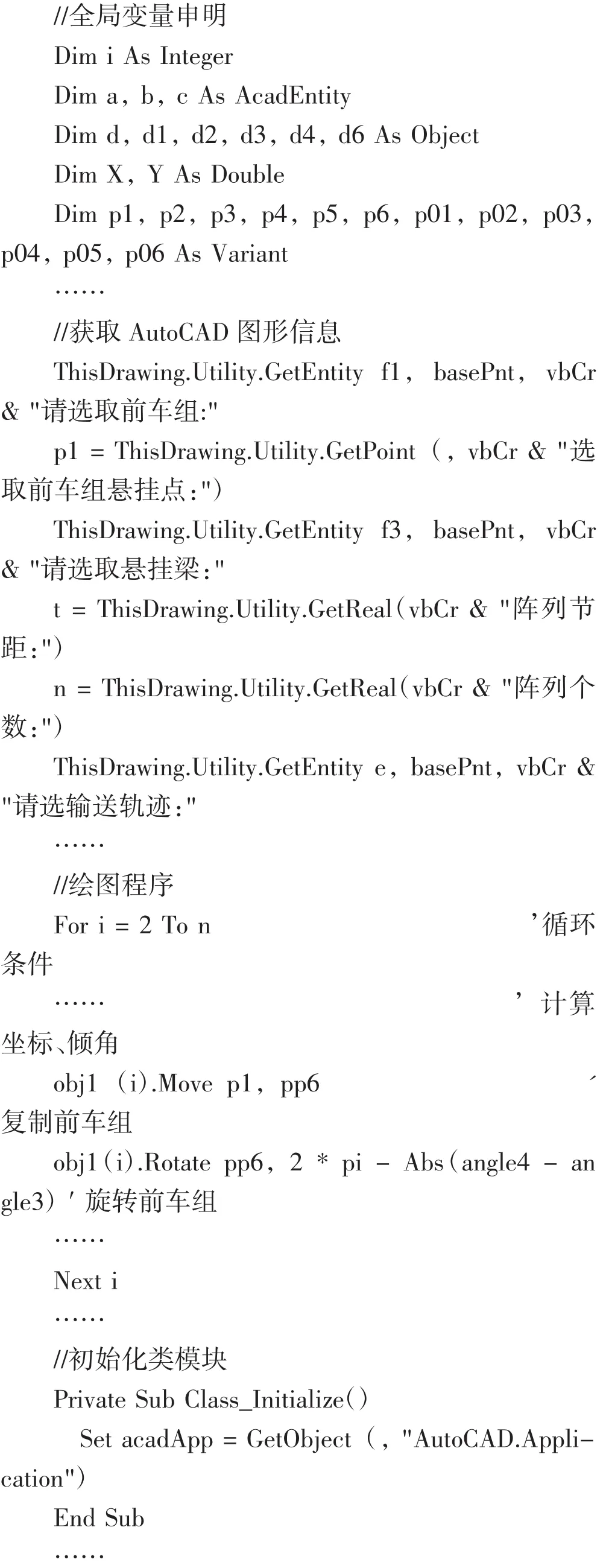
通過性包絡(luò)圖繪制流程圖如圖6所示。
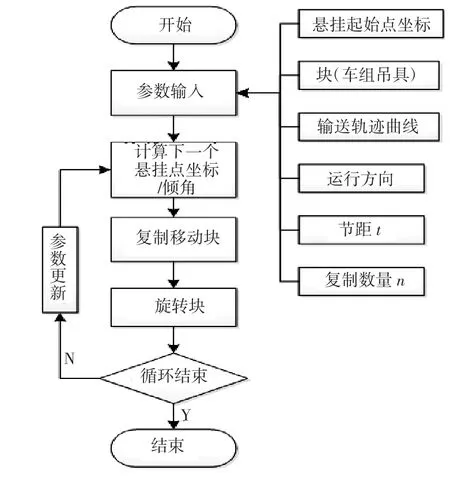
圖6 通過性包絡(luò)圖繪制流程圖
2.2 實(shí)例分析
按照2.1節(jié)所述的過程,對(duì)圖2中底盤線吊具在下坡段區(qū)域做通過性分析。先將車組軌道中心線編輯成多段線,將車組吊具編程成4個(gè)塊:前車組、懸掛梁、后車組和吊具工件。啟動(dòng)VBA宏,按AutoCAD模型空間命令行提示,選取相應(yīng)的多段線、塊及懸掛點(diǎn),并輸入節(jié)距300和數(shù)量100(注意:節(jié)距越小,生成的包絡(luò)圖越密集,雖然通過性分析的精度越高,但計(jì)算機(jī)運(yùn)算的時(shí)間也越長(zhǎng))。參數(shù)輸入以后程序自動(dòng)運(yùn)行,最后在AutoCAD模型空間生成車組吊具下坡通過性包絡(luò)圖,如圖7所示。
分析結(jié)果:1)底盤吊具的坡段扶正軌布置合理,包絡(luò)圖中扶正軌軌跡線與實(shí)際設(shè)計(jì)扶正軌布置基本吻合,能保證車身下坡過程中保持水平狀態(tài);2)空中的護(hù)網(wǎng)設(shè)計(jì)合理,不與吊具或車身發(fā)生干涉。
3 結(jié)束語(yǔ)
VBA繼承了面向?qū)ο蟮木幊陶Z(yǔ)言VB的優(yōu)點(diǎn),充分利用了Windows系統(tǒng)資源及可視化的編程環(huán)境,使其用于對(duì)AutoCAD的二次開發(fā)效率更高,并通過ActiveX Automation接口把AutoCAD和VBA緊密地鏈接在一起,ActiveX Automation技術(shù)的完全面向?qū)ο蠡幊痰奶攸c(diǎn),使其VBA具備了強(qiáng)大的開發(fā)能力和簡(jiǎn)單易用的優(yōu)良特點(diǎn)。本軟件適用于各類空中輸送機(jī)和地面有軌導(dǎo)向輸送機(jī),可以快速生成通過性包絡(luò)圖,幫助設(shè)計(jì)工程師進(jìn)行準(zhǔn)確的通過性分析。
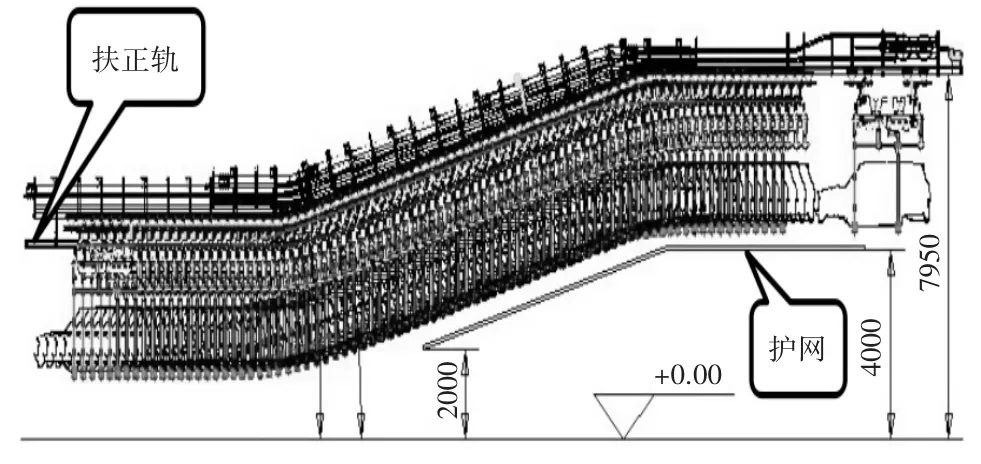
圖7 底盤線下坡段通過性包絡(luò)圖
猜你喜歡
現(xiàn)代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
當(dāng)代經(jīng)濟(jì)研究(2016年5期)2016-12-01 03:12:05
現(xiàn)代農(nóng)業(yè)(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學(xué)學(xué)報(bào)(社會(huì)科學(xué)版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
