基于智能手機(jī)的行人荷載測(cè)試研究
2018-08-02 01:54:22潘子葉
振動(dòng)與沖擊 2018年14期
潘子葉, 陳 雋, 譚 寰
(同濟(jì)大學(xué) 土木工程防災(zāi)國家重點(diǎn)實(shí)驗(yàn)室,上海 200092)
建筑物中行人、觀眾或住戶的行走、跳躍、屈伸或跑動(dòng)等動(dòng)作對(duì)支撐結(jié)構(gòu)的動(dòng)力作用稱為人致荷載,由其引起的結(jié)構(gòu)振動(dòng)稱為人致結(jié)構(gòu)振動(dòng)。這其中,屈伸(bounce)指雙腳不離開地面、身體重心的上下運(yùn)動(dòng),常見于演唱會(huì)和體育比賽的觀眾歡慶方式。對(duì)于人行橋、室內(nèi)連廊、懸臂體育看臺(tái)、大跨度樓蓋以及長(zhǎng)柔樓梯等結(jié)構(gòu),過大的振幅會(huì)引起建筑物中使用者的不舒適感覺甚至恐慌,導(dǎo)致結(jié)構(gòu)振動(dòng)舒適度問題。近年來,隨著上述大跨度柔性結(jié)構(gòu)的大量興建,人致結(jié)構(gòu)振動(dòng)舒適度問題越來越受到設(shè)計(jì)人員以及研究者的重視[1-4]。
人致荷載的動(dòng)力特性與取值是人致結(jié)構(gòu)振動(dòng)分析的核心問題,建立可靠的荷載模型需要大量的實(shí)測(cè)數(shù)據(jù)。人致荷載主要有直接測(cè)試和間接測(cè)試兩種方法。直接法中,陳雋等[5]采用固定測(cè)力板、測(cè)力鞋墊、孫利民等采用測(cè)力跑步機(jī)等儀器獲得荷載時(shí)程。測(cè)力板精度高但數(shù)量有限,往往只能獲得有限步荷載時(shí)程。測(cè)力跑步機(jī)由于測(cè)試者的運(yùn)動(dòng)受到跑步機(jī)履帶速度的控制,所獲得的荷載參數(shù)的變異性較正常地面上偏小,測(cè)試結(jié)果的代表性還存有爭(zhēng)議。測(cè)力鞋墊雖然可以獲得連續(xù)荷載時(shí)程,但由于測(cè)試中鞋墊始終與測(cè)試者的足底有接觸,與實(shí)際存在的騰空狀態(tài)(如步行時(shí)的單腿擺動(dòng)、跳躍時(shí)的騰空等)不符,測(cè)試值需要進(jìn)行后處理。此外,以上三種測(cè)試儀器主要針對(duì)單人情況,目前還難以實(shí)現(xiàn)人群荷載的測(cè)試。間接法是通過測(cè)試其他物理量間接獲得人致荷載。例如,由錄像方式獲得行人運(yùn)動(dòng)時(shí)的特征參數(shù);由結(jié)構(gòu)響應(yīng)反演獲得外部荷載;或者由人體運(yùn)動(dòng)重心的加速度計(jì)算人致荷載等。近年來,間接法測(cè)試由于過程簡(jiǎn)單、容易實(shí)現(xiàn)人群荷載的測(cè)試而受到重視。總體上,如何在測(cè)試者“自然活動(dòng)”的狀態(tài)下完成荷載的連續(xù)測(cè)試,并且能推廣到人群情況,是人致荷載試驗(yàn)研究中的關(guān)鍵技術(shù)問題。
當(dāng)前,以智能手機(jī)為代表的各種智能攜帶設(shè)備,正在以驚人的速度和程度影響并改變著現(xiàn)代人的生活和工作方式。伴隨著硬件技術(shù)的持續(xù)創(chuàng)新以及性能指標(biāo)的迅速提升,智能手機(jī)的綜合功能日益強(qiáng)大。其中,建立在微機(jī)電系統(tǒng)技術(shù)上的三軸加速度傳感器、和陀螺儀傳感器等內(nèi)置傳感器,可記錄手機(jī)的加速度及其方向,并已用于工程結(jié)構(gòu)的振動(dòng)測(cè)試[6-7]。智能手機(jī)的這些新功能為解決人致荷載測(cè)試的技術(shù)難題提供了全新的思路和途徑。據(jù)我國工信部2015年12月底的統(tǒng)計(jì)數(shù)字,我國手機(jī)用戶已達(dá)到13.06億戶,普及率為每百人95.5部。作為人們?nèi)粘I钪斜夭豢缮俚墓ぞ撸瑢⑹謾C(jī)和其使用者相結(jié)合來實(shí)現(xiàn)行人荷載測(cè)試,勢(shì)必為建筑結(jié)構(gòu)活荷載的試驗(yàn)研究提供新手段。
基于上述認(rèn)識(shí),本文首先通過振動(dòng)臺(tái)和三維動(dòng)作捕捉試驗(yàn)檢驗(yàn)智能手機(jī)的測(cè)試精度,完成了設(shè)備的軟硬件選型,在此基礎(chǔ)上開展了智能手機(jī)對(duì)人體運(yùn)動(dòng)狀態(tài)以及行人荷載的實(shí)測(cè),實(shí)測(cè)結(jié)果與固定測(cè)力板結(jié)果的對(duì)比,證明了手機(jī)測(cè)試人致荷載的可行性。
1 智能手機(jī)加速度測(cè)試與坐標(biāo)轉(zhuǎn)換
圖1所示為一般智能手機(jī)的測(cè)試坐標(biāo)系系統(tǒng)(局部坐標(biāo)),x,y,z坐標(biāo)軸以及轉(zhuǎn)動(dòng)的正方向,直線箭頭指向?yàn)榧铀俣葦?shù)據(jù)的正方向,三軸兩兩垂直且x,y軸所構(gòu)成的平面與手機(jī)屏幕平面平行。內(nèi)置三軸加速度傳感器可以記錄手機(jī)在x,y,z方向上的加速度值,三軸陀螺儀可以記錄手機(jī)繞三個(gè)坐標(biāo)軸轉(zhuǎn)動(dòng)時(shí)的角速度?x, ?y, ?z。這里,陀螺儀傳感器的正方向符合右手法則,即拇指指向加速度傳感器正方向時(shí),四指彎曲的指向?yàn)榻撬俣日较?圖1中旋轉(zhuǎn)箭頭所示)。
與普通傳感器的使用過程相同,利用手機(jī)測(cè)試時(shí),需要將手機(jī)固定于被測(cè)物體上,確保不發(fā)生相對(duì)滑移,并使手機(jī)的某一軸線與振動(dòng)方向一致,則此軸線上的實(shí)測(cè)值可作為被測(cè)物體此處的加速度。此外,利用攜帶手機(jī)進(jìn)行人體運(yùn)動(dòng)狀態(tài)的測(cè)試時(shí),手機(jī)局部坐標(biāo)系方向會(huì)隨人體運(yùn)動(dòng)而不斷發(fā)生變化。因此必須對(duì)手機(jī)原始測(cè)試結(jié)果進(jìn)行坐標(biāo)轉(zhuǎn)換,以轉(zhuǎn)換為相對(duì)于某一固定方向(如垂直于地面方向的大地坐標(biāo)系)的實(shí)測(cè)值。

圖1 手機(jī)局部坐標(biāo)系與初始對(duì)中裝置Fig.1 Smartphone’s local coordinate and centering device

(1)

(2)

(3)
式中:n為直到t時(shí)刻的總采樣點(diǎn)個(gè)數(shù),即n=t/Δt,Δt為采樣間隔。
手機(jī)的上述空間轉(zhuǎn)動(dòng)可以等價(jià)為按照某一順序依次繞三個(gè)坐標(biāo)軸的轉(zhuǎn)動(dòng),三個(gè)相對(duì)轉(zhuǎn)角(進(jìn)動(dòng)角、章動(dòng)角和自旋角)統(tǒng)稱為歐拉角,常用以描述剛體在三維歐幾里得空間的取向。因此,手機(jī)在t時(shí)刻的軸線方向可通過三個(gè)基本旋轉(zhuǎn)矩陣獲得。以圖2所示的先z軸,再x軸,最后y軸的旋轉(zhuǎn)順序?yàn)槔坎綄?duì)應(yīng)的旋轉(zhuǎn)矩陣為式(4)~(6)。

圖2 手機(jī)坐標(biāo)軸轉(zhuǎn)換示意圖Fig.2 The rotation of local coordinate
(4)
(5)
(6)

[ax,ay,az]T=H[a1,a2,a3]T
(7)
(8)
式(7)中,H為坐標(biāo)轉(zhuǎn)換矩陣,上標(biāo)T表示轉(zhuǎn)置。
2 測(cè)試系統(tǒng)選型與精度檢驗(yàn)
本節(jié)利用小型振動(dòng)臺(tái)設(shè)備開展了不同手機(jī)與不同數(shù)據(jù)采集軟件的性能試驗(yàn),通過手機(jī)測(cè)試信號(hào)與振動(dòng)臺(tái)實(shí)際輸出信號(hào)的對(duì)比,完成了手機(jī)測(cè)試系統(tǒng)的軟硬件選型,并對(duì)選定測(cè)試系統(tǒng)的測(cè)試精度進(jìn)行了多種信號(hào)的檢驗(yàn)。
2.1 測(cè)試系統(tǒng)軟硬件選型
根據(jù)市場(chǎng)占有率和傳感器配置,首先篩選出6部常用的智能手機(jī),主要信息如下表1所示。

表1 手機(jī)的軟硬件配置信息
從市場(chǎng)占有率、傳感器標(biāo)稱性能、對(duì)應(yīng)軟件性能以及是否免費(fèi)等幾個(gè)方面綜合考慮,本文最終采用了多種不同型號(hào)的iPhone系列手機(jī)進(jìn)行振動(dòng)臺(tái)標(biāo)定。
圖3所示為振動(dòng)臺(tái)驗(yàn)證試驗(yàn)。1號(hào)裝置是有機(jī)玻璃板,通過螺絲(2號(hào))固定于Quanser振動(dòng)臺(tái)上;手機(jī)卡入固定在有機(jī)玻璃板上的手機(jī)殼中(3號(hào))。固定手機(jī)時(shí),保證手機(jī)的x軸在試驗(yàn)過程中與振動(dòng)方向保持一致,且與有機(jī)玻璃板不發(fā)生滑移。
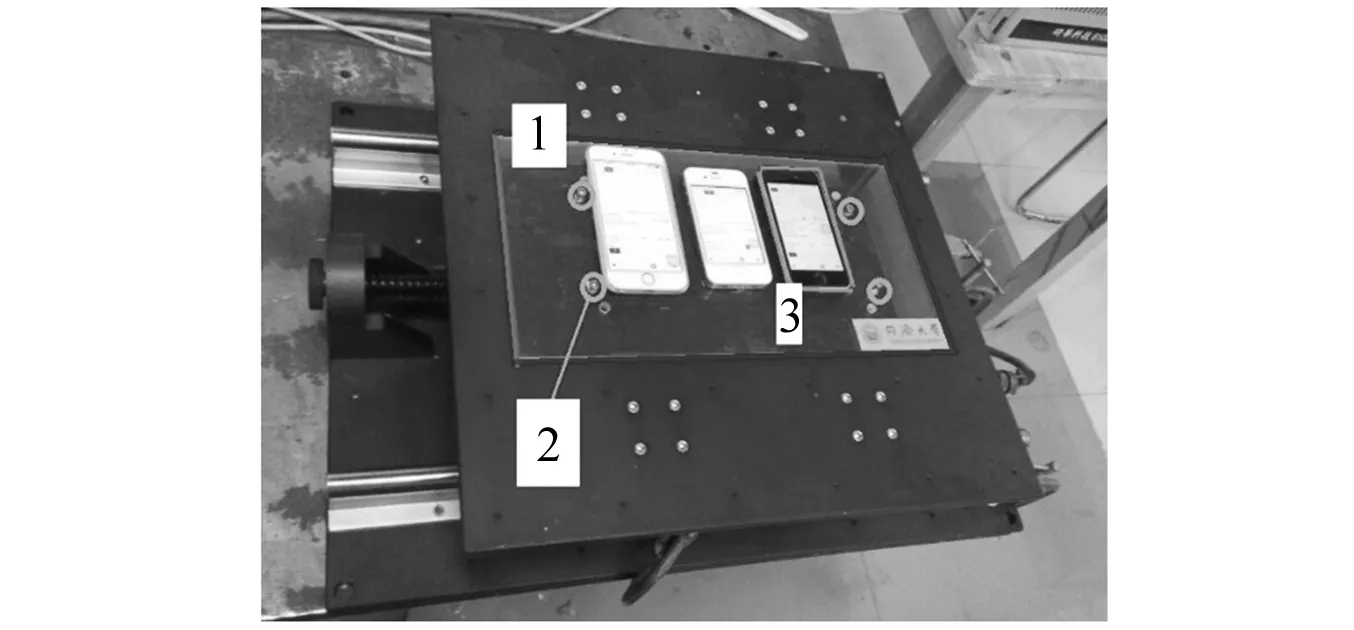
圖3 振動(dòng)臺(tái)驗(yàn)證的安裝照片F(xiàn)ig.3 Verification test by shaking table
此外,為了驗(yàn)證多向振動(dòng)對(duì)各個(gè)坐標(biāo)軸采集數(shù)據(jù)的精度是否造成影響,有試驗(yàn)工況將有機(jī)玻璃板逆時(shí)針旋轉(zhuǎn)45°后固定于振動(dòng)臺(tái)臺(tái)面上(x軸和y軸共同參與振動(dòng)),如圖4所示。
圖4 振動(dòng)臺(tái)驗(yàn)證的安裝照片(45度固定)Fig.4 Verification test by shaking table(45 degree fixed)
2.2 測(cè)試精度檢驗(yàn):正弦波
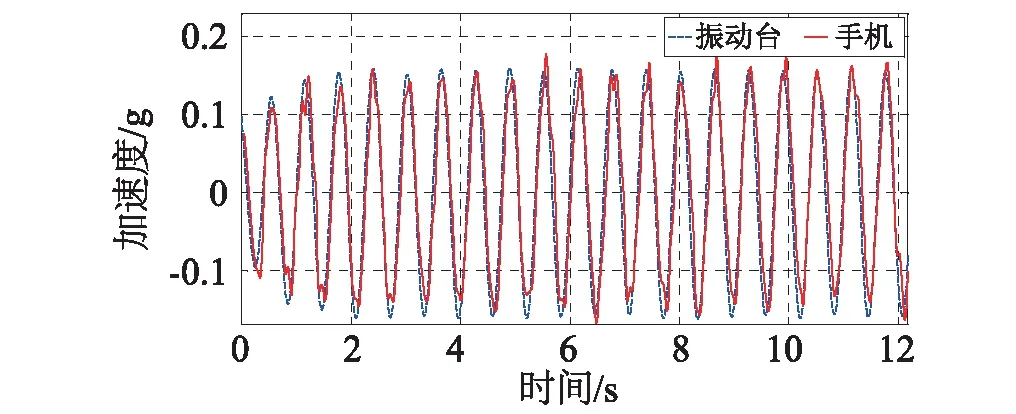
人致荷載是一種周期性荷載,為檢驗(yàn)選定的測(cè)試系統(tǒng)對(duì)于周期信號(hào)的測(cè)試精度,試驗(yàn)中振動(dòng)臺(tái)輸入了7條正弦波,頻率1.2 ~ 3.4 Hz之間,覆蓋了人致荷載的主要頻率范圍。圖5和圖6比較了1.6 Hz和3.4 Hz兩種工況下手機(jī)實(shí)測(cè)加速度與振動(dòng)臺(tái)輸入加速度的時(shí)程曲線和傅里葉幅值譜。對(duì)比表明,手機(jī)測(cè)試值與振動(dòng)臺(tái)輸入信號(hào)的時(shí)程曲線和幅值譜非常接近,其他測(cè)試工況結(jié)果與此類似。在低頻(1.6 Hz)、中頻(2.4 Hz)、高頻(3.4 Hz)三種工況下,手機(jī)測(cè)試值與振動(dòng)臺(tái)輸入的平均峰值誤差為3.1%,2.2%和3.0%,手機(jī)測(cè)試信號(hào)幅值譜主頻與輸入信號(hào)主頻完全一致。這里平均峰值誤差指兩條曲線所有對(duì)應(yīng)峰值誤差的平均值。其他工況的結(jié)果相似:峰值誤差在3.5%以內(nèi),而主頻值則幾乎完全一致。
(a)時(shí)程對(duì)比
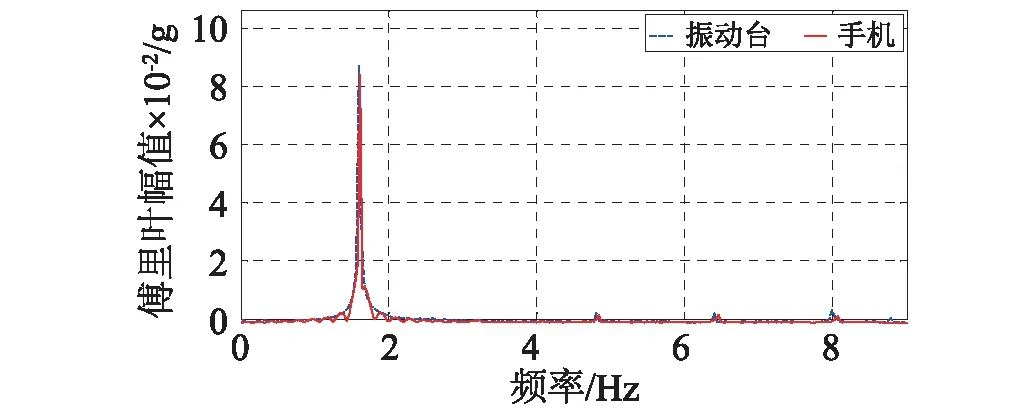
(b)幅值譜對(duì)比圖5 1.6 Hz正弦加速度輸入的測(cè)試精度對(duì)比Fig.5 Comparisons for test case of 1.6 Hz sine wave input

(a)時(shí)程對(duì)比
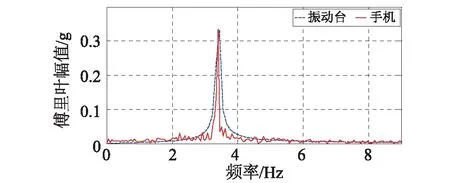
(b)幅值譜對(duì)比圖6 3.4 Hz正弦加速度輸入的測(cè)試精度對(duì)比Fig.6 Comparisons for test case of 3.4 Hz sine wave input
2.3 測(cè)試精度檢驗(yàn):正弦掃頻信號(hào)
試驗(yàn)中輸入了多組變幅正弦掃頻信號(hào)(1.2~3.6 Hz),其中一組掃頻信號(hào)的時(shí)域和頻域?qū)Ρ冉Y(jié)果見圖7。為方便對(duì)比,圖中還比較了兩條曲線的1 s移動(dòng)均方根值(1s Running Root-Mean-Square, 1sRMS)。圖7中兩條1sRMS曲線點(diǎn)對(duì)點(diǎn)的平均誤差為18.88%,而頻域特征幾乎一致。試驗(yàn)結(jié)果表明,手機(jī)對(duì)于掃頻信號(hào)時(shí)域幅值的測(cè)試精度一般,對(duì)信號(hào)頻域特征的測(cè)試精度高。
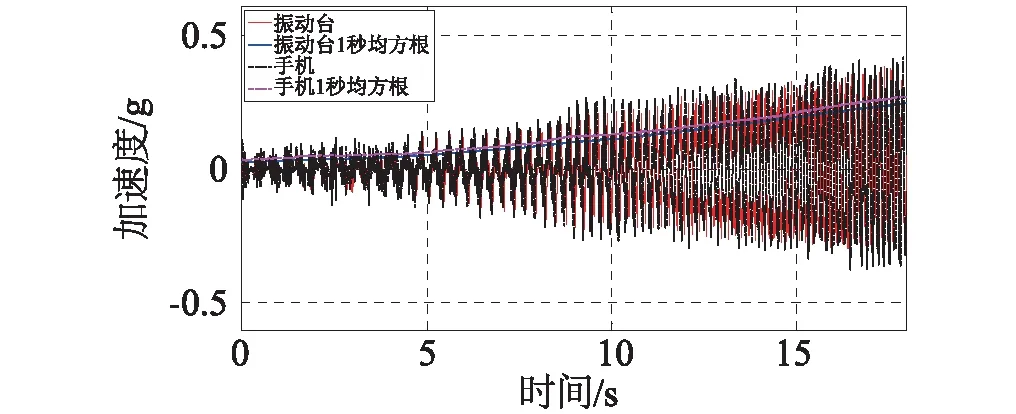
(a)時(shí)程對(duì)比
(b)幅值譜對(duì)比圖7 掃頻波輸入工況比較Fig.7 The comparison of shaking table data and smart phone sensor data under sinusoidal vibration
2.4 測(cè)試精度檢驗(yàn):地震動(dòng)信號(hào)
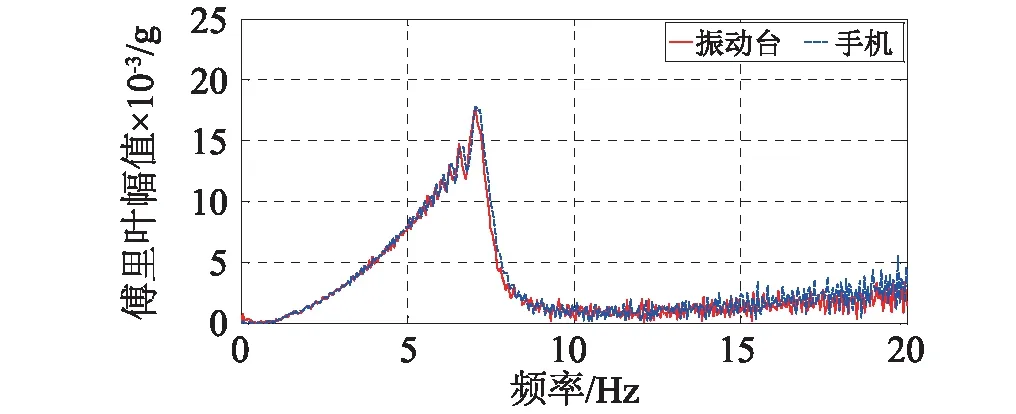
為了驗(yàn)證手機(jī)測(cè)量復(fù)雜振動(dòng)信號(hào)的精度,還進(jìn)行了四種地震波輸入的試驗(yàn):EL-Centro、Northbridge、Kobe和Mendocino地震波。圖 8、圖9所示為不同型號(hào)手機(jī)記錄值與EL-Centro地震波的比較。iPhone5C及以上手機(jī)的信號(hào)可以反映輸入地震波的宏觀時(shí)域特征(如波形、峰值數(shù)量等),但在信號(hào)的細(xì)節(jié)特征上仍有差距,此外幅值譜的特性也有不同。其他三個(gè)地震波試驗(yàn)的結(jié)果類似。由于不同手機(jī)的加速度傳感器類型不同,上述試驗(yàn)結(jié)果表明,現(xiàn)階段應(yīng)慎重采用手機(jī)進(jìn)行地震動(dòng)等時(shí)域特性復(fù)雜信號(hào)的直接測(cè)試。

圖8 振動(dòng)臺(tái)輸入El-Centro地震波加速度數(shù)據(jù)與不同型號(hào)手機(jī)加速度傳感器記錄對(duì)比Fig.8 The comparison of the recording time history under El-Centro earthquake vibration between shaking table and smart phones with different types

圖9 四種不同型號(hào)手機(jī)與振動(dòng)臺(tái)輸入El-Centro地震波加速度數(shù)據(jù)的傅里葉幅值譜對(duì)比Fig.9 The comparison of the Fourier spectrum under El-Centro earthquake vibration between shaking table and smart phones with different types
2.5 測(cè)試精度檢驗(yàn):雙向振動(dòng)信號(hào)
采用圖4所示固定方式,可獲得智能手機(jī)在多向振動(dòng)工況下的測(cè)試精度。圖10,圖11給出了1.6 Hz工況下,手機(jī)實(shí)測(cè)單軸加速度(分別給出x軸和y軸加速度時(shí)程)與振動(dòng)臺(tái)輸出加速度在x,y軸方向上分量的時(shí)頻域?qū)Ρ取?/p>
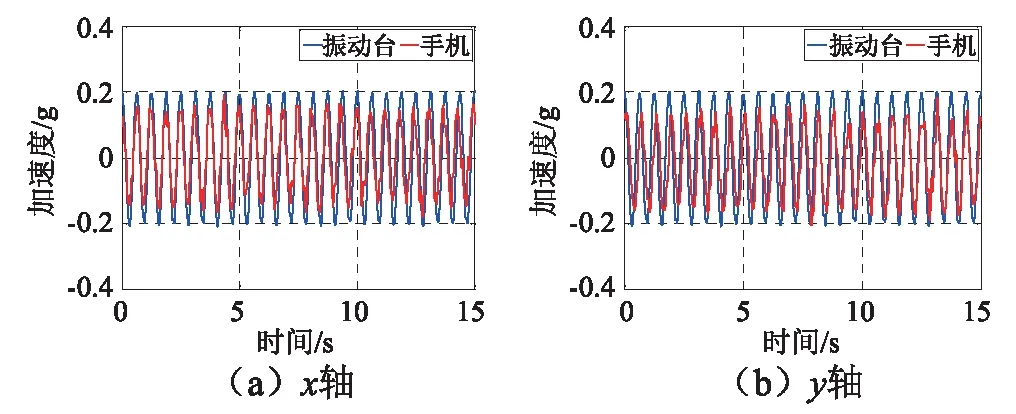
圖10 1.6 Hz雙向振動(dòng)時(shí)程對(duì)比Fig.10 1.6 Hz two-way shaking table time domain result

圖11 1.6 Hz雙向振動(dòng)頻域?qū)Ρ菷ig.11 1.6 Hz two-way shaking table frequency domain result
結(jié)果表明,時(shí)域范圍內(nèi),雙向振動(dòng)工況下的手機(jī)測(cè)試精度相對(duì)于單向振動(dòng)工況下的測(cè)試精度明顯降低:1.6 Hz工況下,手機(jī)x軸和y軸所記錄到的峰值誤差增加到27.5%和24.0%,顯然測(cè)試時(shí)手機(jī)的放置方式對(duì)測(cè)試結(jié)果有影響。在頻域內(nèi),手機(jī)測(cè)試信號(hào)主頻與振動(dòng)臺(tái)輸出信號(hào)主頻基本一致,與單向振動(dòng)工況下的測(cè)試精度無太大差別。
3 三維動(dòng)作捕捉試驗(yàn)
上節(jié)一系列檢驗(yàn)試驗(yàn)表明對(duì)于較低頻率的周期性信號(hào),固定良好的智能手機(jī)對(duì)指定方向具有很好的測(cè)量精度,因此可用于具有周期性的、低頻行人運(yùn)動(dòng)的測(cè)試。本節(jié)利用三維動(dòng)作捕捉試驗(yàn)進(jìn)一步討論手機(jī)行人荷載測(cè)試中的另外兩個(gè)關(guān)鍵技術(shù)問題:攜帶方式和坐標(biāo)轉(zhuǎn)換。
3.1 三維動(dòng)作捕捉技術(shù)
三維動(dòng)作捕捉(3D Motion Capture Technology, 3DM)是利用多臺(tái)紅外攝像機(jī)捕捉測(cè)試對(duì)象上的反光標(biāo)記物(稱為Marker)空間運(yùn)動(dòng)軌跡的一種測(cè)量方法。
3.2 固定方式的影響
在行人運(yùn)動(dòng)狀態(tài)下進(jìn)行測(cè)試,手機(jī)可采用不同的固定(攜帶)方式。因此需要了解固定方式對(duì)測(cè)試數(shù)據(jù)可靠性的影響。試驗(yàn)中考慮了兩種方式:一種是將手機(jī)放在褲子的口袋中并用手輔助固定,如圖 12(a)所示;另一種采用腰帶上加固定封套,將手機(jī)固定在測(cè)試者腰部靠近人體質(zhì)心點(diǎn)的位置,如圖 12(b)所示。以上兩種固定情況下都有Marker點(diǎn)粘貼在手機(jī)上。測(cè)試者在外部節(jié)拍器的引導(dǎo)下,完成多種頻率下的跳躍和屈伸。
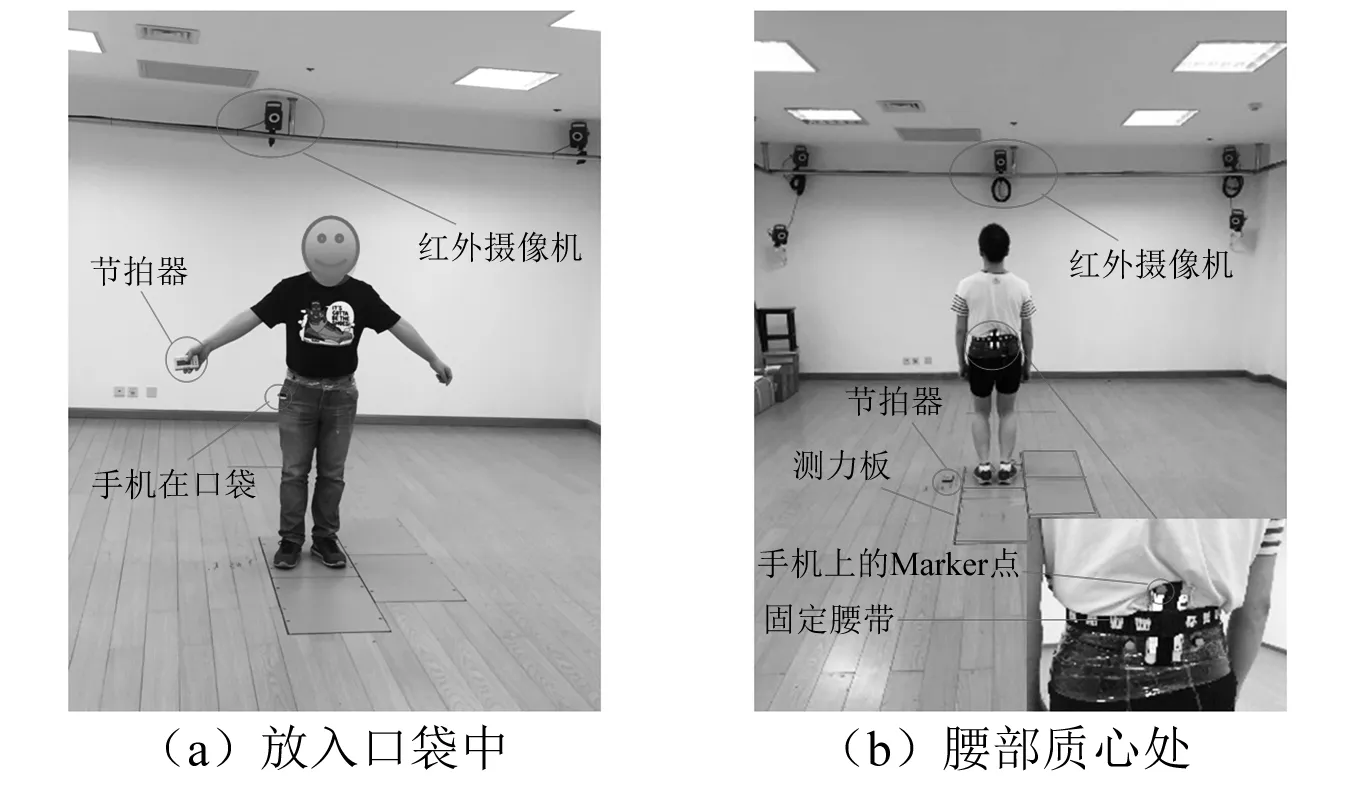
圖12 試驗(yàn)中的兩種測(cè)試固定方式Fig.12 Two different installation methods in the test
對(duì)于跳躍和屈伸運(yùn)動(dòng),圖13是采用第一種固定方式的典型對(duì)比結(jié)果;圖14是采用第二種固定方式的典型對(duì)比結(jié)果。可見,手機(jī)測(cè)試值的確受到固定方式的影響,第二種固定方式的測(cè)試精度優(yōu)于第一種固定方式,測(cè)試結(jié)果更可靠。需要指出,第一種固定方式時(shí)手機(jī)實(shí)測(cè)信號(hào)的主頻與試驗(yàn)中設(shè)定的頻率一致,即此時(shí)部分測(cè)試結(jié)果(頻率)可靠。這一數(shù)據(jù)低值的特點(diǎn)與龐大的手機(jī)用戶數(shù)量相結(jié)合,對(duì)于未來構(gòu)建居民可參與的大數(shù)據(jù)振動(dòng)監(jiān)測(cè)網(wǎng)絡(luò)是有意義的。盡管結(jié)合下一小節(jié)討論的坐標(biāo)轉(zhuǎn)換方法,可以適當(dāng)放松對(duì)手機(jī)測(cè)試固定狀態(tài)的要求,但實(shí)用中應(yīng)盡可能采用穩(wěn)定的固定方式以獲得更理想的測(cè)試結(jié)果。這一結(jié)論顯然與普通加速度傳感器的使用要求是完全一致的。
3DM試驗(yàn)表明,穩(wěn)定固定方式下,對(duì)于行走、跳躍和屈伸運(yùn)動(dòng),手機(jī)的加速度測(cè)試精度與Marker點(diǎn)精度一致,可用于行人運(yùn)動(dòng)狀態(tài)的測(cè)試。

(a) 2.0 Hz跳躍時(shí)手機(jī)信號(hào)與Marker點(diǎn)信號(hào)對(duì)比
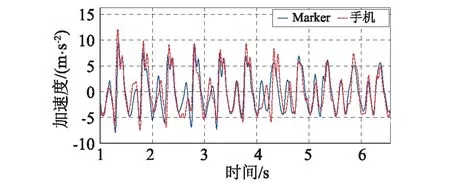
(b) 2.0 Hz 屈伸時(shí)手機(jī)信號(hào)與Marker點(diǎn)信號(hào)對(duì)比圖13 第一種固定方式下對(duì)比Fig.13 The comparison under the first fixed method

(a) 2.0 Hz跳躍時(shí)手機(jī)信號(hào)與Marker點(diǎn)信號(hào)對(duì)比
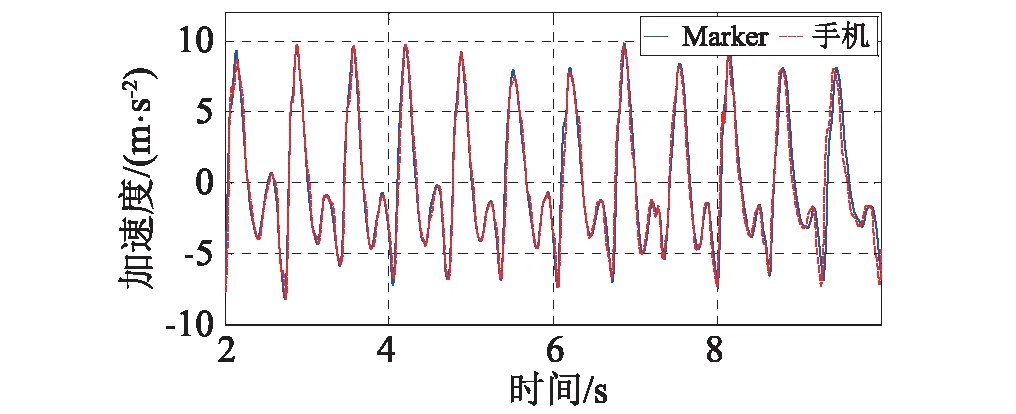
(b) 2.0 Hz 屈伸時(shí)手機(jī)信號(hào)與Marker點(diǎn)信號(hào)對(duì)比圖14 第二種固定方式下對(duì)比Fig.14 The comparison under the second fixed method
表2,表3是各工況下手機(jī)數(shù)據(jù)與Marker的相對(duì)誤差,表中不同字母代表不同的測(cè)試者,可見手機(jī)的加速度測(cè)試精度與三維動(dòng)作捕捉技術(shù)的測(cè)試精度基本一致。
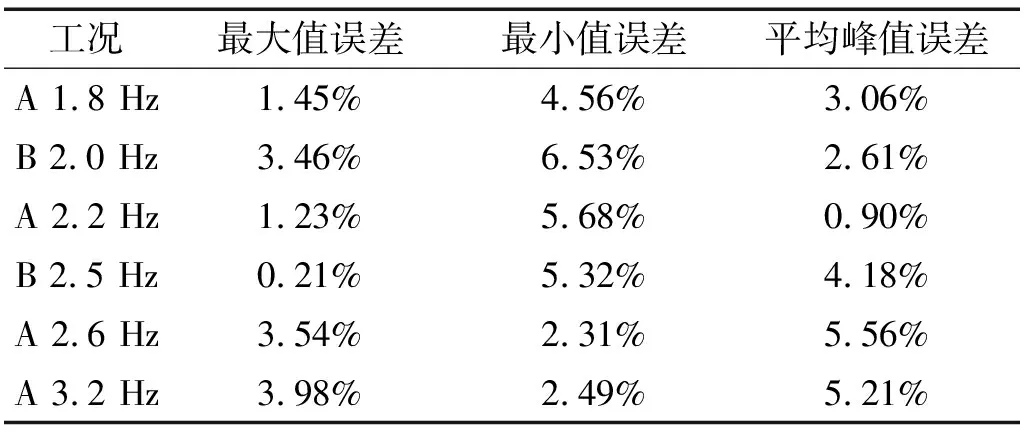
表2 屈伸運(yùn)動(dòng)各頻率工況下的誤差
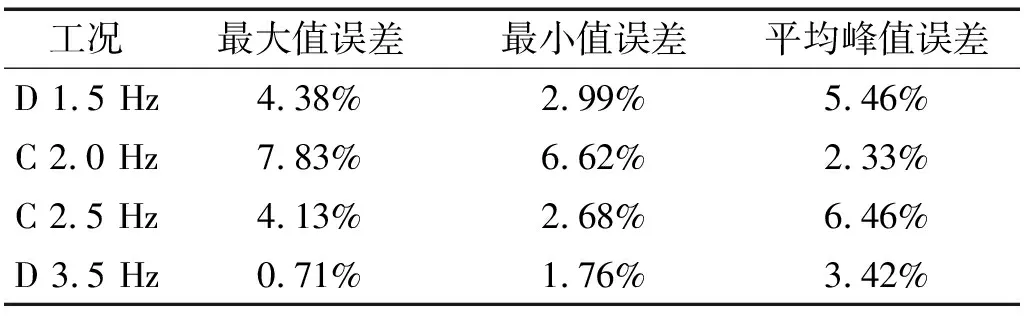
表3 跳躍運(yùn)動(dòng)各頻率工況下的誤差
3.3 數(shù)據(jù)處理與坐標(biāo)轉(zhuǎn)換
由于運(yùn)動(dòng)過程中手機(jī)的軸線指向可能存在偏轉(zhuǎn),需要將過程的測(cè)試值修正為初始設(shè)定的坐標(biāo)軸方向。為此,首先在采用圖1的垂直對(duì)中裝置進(jìn)行手機(jī)初始狀態(tài)對(duì)中,即確定初始時(shí)刻手機(jī)的軸線方向,隨后再固定在試驗(yàn)者腰帶上進(jìn)行測(cè)試。對(duì)手機(jī)記錄結(jié)果進(jìn)行9階巴特沃斯低通濾波,截止頻率為10 Hz,然后利用式(7)進(jìn)行坐標(biāo)轉(zhuǎn)換。圖15對(duì)比了2.6 Hz的屈伸工況時(shí)的修正前后的手機(jī)加速度信號(hào)的1sRMS和10sRMS值與Marker點(diǎn)對(duì)應(yīng)結(jié)果,對(duì)比顯示,經(jīng)過坐標(biāo)轉(zhuǎn)換后的1sRMS值和10sRMS值與Marker點(diǎn)的對(duì)應(yīng)指標(biāo)更加接近,說明了坐標(biāo)轉(zhuǎn)換方法的合理性。

(a) 1s RMS值對(duì)比
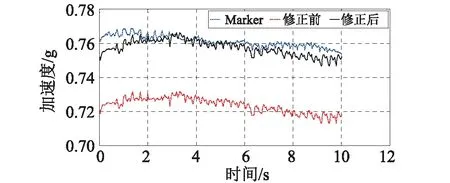
(b) 10sRMS值對(duì)比圖15 2.6 Hz 屈伸加速度值坐標(biāo)修正前后 與Marker點(diǎn)加速度各指標(biāo)對(duì)比Fig.15 The comparison of unrevised acceleration and revised acceleration between smart phone’s sensor and Marker under 2.6 Hz bounce case
4 基于智能手機(jī)的行人荷載實(shí)測(cè)


(9)
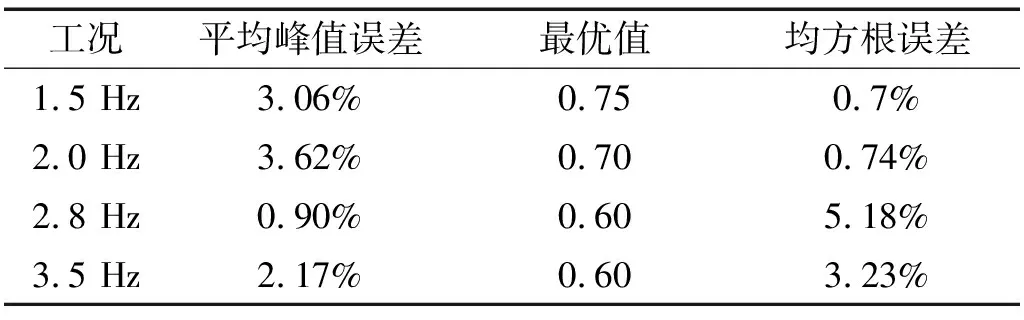
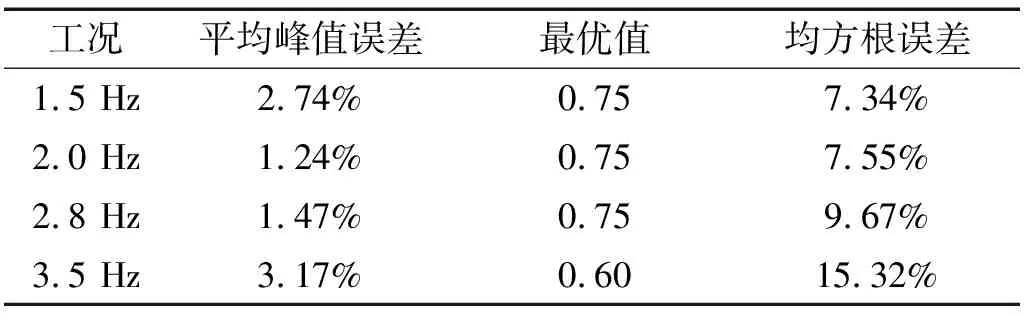
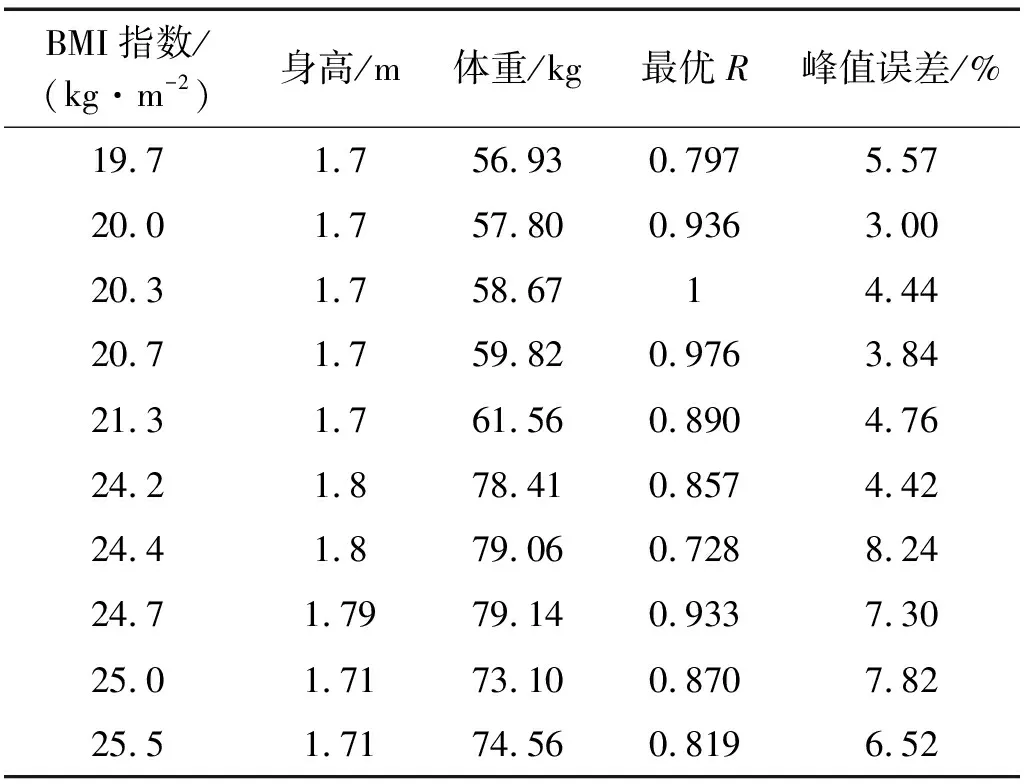
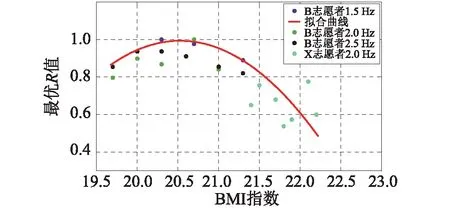
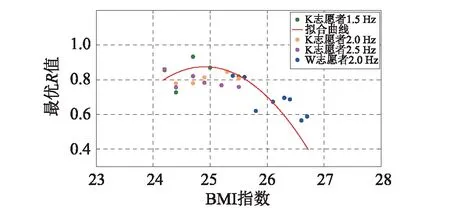
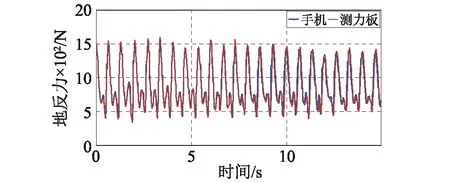
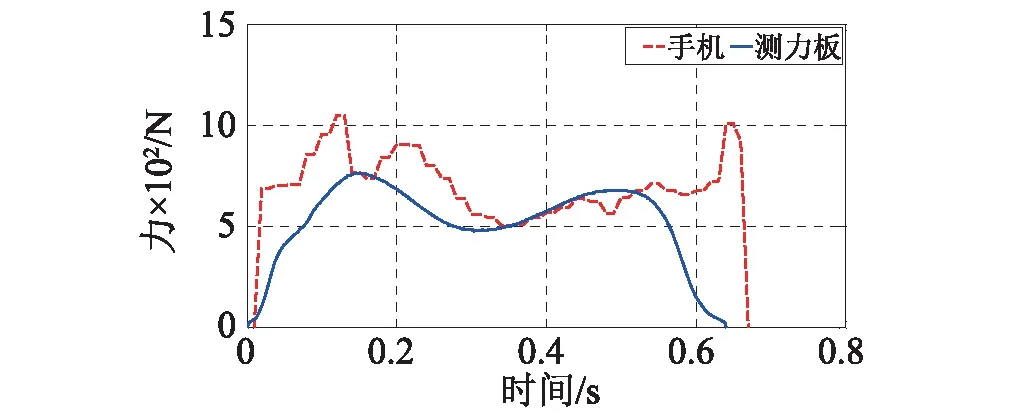
式中:G(t)為行人運(yùn)動(dòng)所引起的地反力,即行人荷載;m為行人的質(zhì)量(kg);g為重力加速度(m/s2);R(0 通過對(duì)比測(cè)力板與式(9)的結(jié)果可以獲得最優(yōu)系數(shù)R:即式(9)計(jì)算行人荷載與測(cè)力板結(jié)果最接近時(shí)的R值。表4和表5所示為某位測(cè)試者在各不同工況下最優(yōu)R值以及對(duì)應(yīng)的計(jì)算荷載與實(shí)測(cè)荷載的均方根誤差。 表4 不同屈伸運(yùn)動(dòng)工況下的誤差及最優(yōu)值 表5 不同跳躍運(yùn)動(dòng)工況下的誤差及最優(yōu)值 相關(guān)文獻(xiàn)證明:身體質(zhì)量指數(shù)(Body Mass Index,BMI)對(duì)人體運(yùn)動(dòng)姿態(tài)和足底壓力起著至關(guān)重要的影響作用,因此可以建立振動(dòng)參與系數(shù)與BMI的關(guān)系。四位測(cè)試者參加了實(shí)驗(yàn),通過在在測(cè)試者腰部增加沙袋的方式來改變體重,共獲得了十組不同BMI值下的R值(表6)。BMI指數(shù)計(jì)算方法如式(10)所示: BMI=M/h2 (10) 式中:M表示測(cè)試者總質(zhì)量(kg);h表示測(cè)試者身高(m)。 表6為試驗(yàn)中不同測(cè)試者的BMI指數(shù)對(duì)應(yīng)的最優(yōu)R值和峰值誤差。根據(jù)常見的人體BMI指數(shù)區(qū)間調(diào)查結(jié)果顯示[9],將試驗(yàn)獲得的R值和對(duì)應(yīng)BMI指數(shù)在兩個(gè)區(qū)間進(jìn)行擬合,擬合公式為(11),結(jié)果見圖16。 并給出屈伸運(yùn)動(dòng)的手機(jī)轉(zhuǎn)化力和測(cè)力板實(shí)測(cè)結(jié)果對(duì)比情況(圖17): (11) 表6 不同BMI值數(shù)下的誤差及最優(yōu)值 (a)范圍1 (b)范圍2圖16 二次拋物線擬合最優(yōu)值與BMI指數(shù)的關(guān)系曲線Fig.16 The relationship between the bestand BMI index by the method of parabolic fitting 式(9)同樣適用于跳躍荷載,可采用相同的步驟獲得R值與BMI的關(guān)系。本研究結(jié)果表明對(duì)于跳躍的R值受BMI影響不顯著,大致在0.90~1.0之間,可統(tǒng)一取為0.95。對(duì)于步行荷載,作者此前的研究表明(張夢(mèng)詩等,2013):?jiǎn)蝿傮w模型獲得的荷載模型計(jì)算值精度一般。而采用多剛體模型(如15體段的多剛體模型)可獲得更高的精度,但模型對(duì)于測(cè)試數(shù)據(jù)量的要求也相應(yīng)要提高。 利用手機(jī)獲得行人的運(yùn)動(dòng)加速度后代入式(9)即可獲得行人荷載。圖17,圖18給出屈伸、跳躍荷載與步行荷載的典型結(jié)果。計(jì)算時(shí),屈伸的R值按式(11)計(jì)算,跳躍取0.95,步行取為0.55。計(jì)算結(jié)果與測(cè)力板結(jié)果的對(duì)比表明:對(duì)于屈伸荷載,手機(jī)測(cè)試結(jié)果的最大時(shí)域峰值誤差在10%以內(nèi),精度較好,頻譜的主峰值一致;對(duì)于跳躍荷載,手機(jī)測(cè)試結(jié)果的最大時(shí)域峰值誤差在15%以內(nèi),調(diào)整R值后可獲得更高精度的結(jié)果,頻譜的主峰值一致;對(duì)于步行荷載,單個(gè)手機(jī)測(cè)試結(jié)果的精度一般,時(shí)域內(nèi)波形和峰值都有偏差,但頻譜的主峰值基本一致。 需要指出,本研究采用智能手機(jī)方法獲得的人致荷載精度與采用Opal可穿戴式慣性傳感器的最新跳躍荷載的研究文獻(xiàn)[10]的現(xiàn)象一致:時(shí)域波形和主要峰值參數(shù)接近,頻譜特性基本相同。上述結(jié)果以及其他領(lǐng)域的最新試驗(yàn)結(jié)果表明[11]:利用智能手機(jī)實(shí)現(xiàn)人體周期性動(dòng)作的準(zhǔn)確測(cè)試是完全可行的。 圖17 Bounce工況手機(jī)測(cè)試值與測(cè)力板對(duì)比(1.5 Hz, R=0.728)Fig.17 The comparison of force got by smart phone and force got by force plate under bouncing load (1.5 Hz, R=0.728) (a)某志愿者跳躍工況手機(jī)轉(zhuǎn)換力與測(cè)力板實(shí)測(cè)結(jié)果(1.5 Hz,數(shù)值法最優(yōu)R=0.950) (b) 步行工況手機(jī)測(cè)試值與測(cè)力板測(cè)量值對(duì)比(右腳2.0 Hz,數(shù)值法最優(yōu)R=0.550 3)圖18 手機(jī)對(duì)人行荷載的測(cè)量與固定板測(cè)力結(jié)果對(duì)比Fig.8 The human load test results got by smartphones versus the results got by the force plate 本文通過一系列試驗(yàn)研究了智能手機(jī)進(jìn)行行人荷載實(shí)測(cè)的可行性、實(shí)施技術(shù)和測(cè)試精度。 振動(dòng)臺(tái)試驗(yàn)結(jié)果表明,智能手機(jī)中所配置的加速度傳感芯片的精度是測(cè)試精度主要影響因素[12-14]。采用集成最新硬件系統(tǒng)的智能手機(jī)型號(hào)配合具有高采樣頻率的數(shù)據(jù)采集軟件,可準(zhǔn)確獲得諧波信號(hào)(1.5~3.4 Hz范圍)的時(shí)頻特征、掃頻波的頻譜特征,較為準(zhǔn)確地得到掃頻波的時(shí)域特征。對(duì)于地震波信號(hào),智能手機(jī)系統(tǒng)的測(cè)量結(jié)果體現(xiàn)出有限價(jià)值:能反映信號(hào)的宏觀時(shí)域特征,但在峰值大小、時(shí)刻以及頻譜特性上,精度較差。 三維動(dòng)作捕捉試驗(yàn)表明,智能手機(jī)系統(tǒng)可用于行人運(yùn)動(dòng)狀態(tài)的測(cè)試,手機(jī)記錄加速度值經(jīng)過坐標(biāo)轉(zhuǎn)換后可準(zhǔn)確反映行人步行、屈伸和跳躍運(yùn)動(dòng)時(shí)測(cè)量點(diǎn)處的加速度值。 測(cè)力板對(duì)比試驗(yàn)表明,手機(jī)加速實(shí)測(cè)值與人體運(yùn)動(dòng)的生物力學(xué)模型相結(jié)可獲得行人荷載,荷載精度取決于力學(xué)模型的準(zhǔn)確性。采用單剛體模型假定時(shí),手機(jī)獲得的屈伸和跳躍運(yùn)動(dòng)的荷載值精度較高,采用更準(zhǔn)確的質(zhì)量參與系數(shù)可進(jìn)一步提升測(cè)試精度。對(duì)于步行運(yùn)動(dòng),單剛體模型不適合,但手機(jī)測(cè)試結(jié)果的主頻值有意義。4.1 振動(dòng)參與系數(shù)R
4.2 行人荷載結(jié)果

5 結(jié) 論
猜你喜歡
紅領(lǐng)巾·萌芽(2022年9期)2022-11-24 05:55:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
英語文摘(2020年5期)2020-09-21 09:26:30
中國生殖健康(2019年3期)2019-02-01 06:12:26
趣味(語文)(2018年8期)2018-11-15 08:53:00
海外星云(2016年7期)2016-12-01 04:18:00
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
樂活老年(2016年10期)2016-02-28 09:30:37
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00
