基于模糊控制的模型車軌跡跟蹤系統(tǒng)設(shè)計
2018-07-31 01:33:58沈芳韓國棟吳鈁
電氣自動化
2018年2期
關(guān)鍵詞:系統(tǒng)
沈芳, 韓國棟, 吳鈁
(1.華中科技大學(xué) 自動化學(xué)院, 河北 武漢 430074; 2.中核蘭州鈾濃縮有限公司,甘肅 蘭州 730065)
0 引 言
自動引導(dǎo)車輛是現(xiàn)代科技的產(chǎn)物,車載微機的性能日益強大[1],并且能通過無線的方式接收控制中心的調(diào)度指令,完成啟動、停止、路徑規(guī)劃、避障等功能,完美詮釋了其智能化、無人化等特點。在移動方式上,以輪式移動最為常見[2],應(yīng)用范圍不僅限于倉儲業(yè)和制造業(yè)上,其他行業(yè)如:郵電、煙草、港口搬運等也都是自動引導(dǎo)小車的應(yīng)用場所。其作為柔性運輸?shù)闹匾ぞ吆妥詣踊a(chǎn)的典型代表,是我國高新技術(shù)研發(fā)的重點。在工業(yè)化生產(chǎn)制造中,性能卓越的模型車控制系統(tǒng)所擔(dān)當(dāng)?shù)慕巧絹碓绞艿絿鴥?nèi)外學(xué)者的高度關(guān)注。
此系統(tǒng)構(gòu)建是以小車視覺[3]為基礎(chǔ),將模糊控制理論應(yīng)用于小車控制研究。根據(jù)仿真波形及調(diào)試經(jīng)驗完善模糊規(guī)則表,快速消除運行過程中產(chǎn)生的偏差,實現(xiàn)軌跡的快速準(zhǔn)確跟蹤。
1 系統(tǒng)概要
1.1 控制系統(tǒng)組成
此系統(tǒng)主要由四個部分組成:攝像頭、上位機、無線路由器、模型車,如圖1所示。上位機給智能車下發(fā)不同的任務(wù)指令,并規(guī)劃相應(yīng)的執(zhí)行路徑;模型車接收到上位機指令后,自主解析數(shù)據(jù),執(zhí)行相應(yīng)任務(wù);攝像頭按照一定的頻率實時獲取模型車位置,并發(fā)送給上位機和模型車,實現(xiàn)位置反饋;無線路由作為各個模塊的網(wǎng)絡(luò)連接,實現(xiàn)所有數(shù)據(jù)的傳輸。
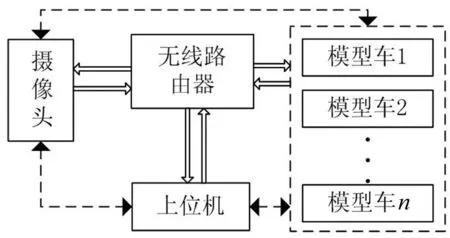
圖1 系統(tǒng)框圖
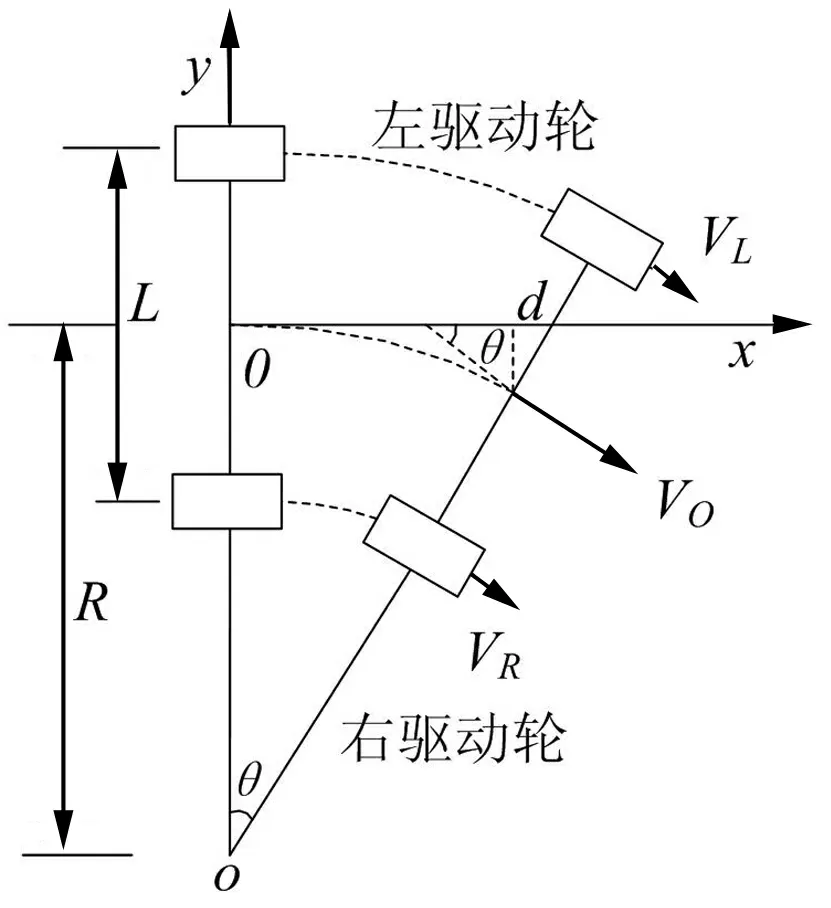
圖2 模型車運動模型
1.2 模型車數(shù)學(xué)模型
模型車采用三輪式結(jié)構(gòu),前輪為自由輪,后兩輪獨立驅(qū)動且通過差速來控制轉(zhuǎn)向[4],其曲線運動半徑或轉(zhuǎn)動方向可通過控制兩輪速度差ΔV或旋轉(zhuǎn)方向的不同來實現(xiàn)。……
登錄APP查看全文
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
智能系統(tǒng)學(xué)報(2015年4期)2015-12-27 09:37:59
