基于多分布特征的航天器遙測動態加權異常檢測算法
2018-07-31 04:25:00盧言華
兵器裝備工程學報 2018年7期
杜 瑩,王 飛,孫 超,盧言華,楊 翔
(中國人民解放軍63758部隊, 福建 廈門 361023)
為改善航天器的在軌管理、提高航天器的在軌性能,需要分析航天器的運行狀態,對其進行有效的異常分析與檢測,以確定航天器是否處于危險狀態[1-5]。由于受噪聲、干擾、復雜空間環境以及短期保持穩定運行模式等因素的影響,反映在軌航天器工作狀態的遙測數據多呈現長期趨勢非平穩、短期局部變化相對平穩的模式,其特征是數據序列雖具有非平穩變化特性,但在短時期局部范圍內基本保持恒定模式。本文將具有該特征的遙測數據稱為局部趨勢滿足平穩條件的遙測數據,簡稱為局部平穩遙測序列,其局部范圍內數據序列的變化特性反映了航天器在軌短期運行的復雜動態。研究在軌航天器局部平穩遙測序列的異常檢測算法,有助于及時發現遙測時序數據的異常變化,提前預測航天器潛在故障,從中挖掘出各部件及器件的異變信息,對航天器在軌管理與安全可靠運行具有特別重要的意義。
當前,時序數據的異常檢測方法主要有基于距離的異常檢測算法,基于自回歸的異常檢測算法和基于統計的異常檢測算法[6-16]。
1) 基于距離的異常檢測方法。將時間序列以滑動窗口的方式劃分為一個個連續的子序列,通過計算子序列中的最大近鄰距離來檢測異常子序列,該方法簡單高效,但運算復雜[6-7,14]。
2) 基于自回歸的方法。采用自回歸模型獲取當前數據序列的估計值,通過與實際序列值比較,將偏差超出某門限的序列判為異常序列;缺點是該方法建立在序列平穩特性的假設上,且其檢測的準確性依賴于自回歸模型的選擇和門限的合理設置[8]。
3) 基于統計的異常檢測方法[10,15]。假定數據滿足固定的分布,通過構建數據的統計分布模型,將異常時間序列檢測出來;該方法具有堅實的數學理論基礎,其關鍵在于選擇合適的特征及相應的特性算子來全面體現數據的統計分布信息,難點在于數據分布特性的識別與描述。由于在軌航天器局部平穩遙測短期局部區域范圍滿足固定分布要求,其統計分布特性不隨時間變化,可采用固定分布準確描述數據統計特性。因此,在基于統計的異常檢測方法中,建立一個能夠全面描述遙測統計特性的模型非常重要,合理有效的特征表示與特征選擇決定了航天器遙測異常檢測的準確性。
本文面向在軌航天器局部平穩遙測數據,針對單一特征難以全面描述數據統計分布特性的不足,通過分析基于距離與基于統計的異常檢測算法的各自特點,構建了一種基于分布特性算子表示的模型匹配航天器遙測異常檢測算法。該算法利用分布特性算子對航天器局部平穩遙測統計分布的集中特性、離散特性、形狀特性和邊界特性進行融合描述,定義多維特征向量異常檢測模板,并依照此模板,對不同異常分布模式下的特征進行動態加權,建立一種高效的局部平穩遙測聯合多分布域檢測基準模型,以此為基礎,實現航天器局部平穩遙測序列的異常檢測;同時,針對遙測數據的復雜變換特性,采用數據驅動模式進行檢測基準模型的動態加權,能夠有效適應復雜空間環境下在軌航天器遙測數據的變化特性。某型號航天器電源分系統遙測序列異常檢測的對比實驗表明:相對于取單一特征、非加權多特征的檢測方法,融合多特征的加權算法能夠最大限度地減少漏判,抑制虛警,具有較高的異常判讀準確率,可有效檢測遙測數據的形態、幅值、趨勢等復雜異變情況,檢測效果具有魯棒性。
1 融合多特征的加權分別異常檢測框架
本文提出融合多特征的在軌航天器局部平穩遙測加權分布異常檢測方法(Anomaly Detection for Locally Stationary Telemetry Data of Spacecraft Based on Fusing Multiple Weighted Distribution Features,ADMF),基于此進行遙測序列異常檢測。圖1給出了融合多特征的航天器局部平穩遙測加權分布異常檢測框架。

圖1 ADMF算法框架
由圖1可知,本文提出的算法主要有以下4個關鍵:
1) 多維特征向量模板結構定義。通過統計分布域算子對航天器遙測參數統計分布的不同特性進行描述,定義多維特征向量模板結構。
2) 聯合多分布域檢測基準模型構建。在多維特征向量模板結構的基礎上,提取遙測參數樣本信息統計分布的集中特征、離散特性、形狀特性和邊界特性,并根據其所屬類別賦予各特征不同的權值,建立聯合多分布域檢測基準模型。
3) 局部平穩遙測異常檢測。將待檢測局部平穩遙測序列的特征模型與檢測基準模型匹配,加權處置后得到聯合分布距離差,根據聯合分布距離差進行局部平穩遙測序列的異常檢測。
4) 聯合多分布域檢測基準模型動態加權。由于受到系統自身特性以及軌道、環境因素的影響,需要進行檢測模板的動態加權,以適應在軌航天器遙測的最新變化趨勢。本文采用數據驅動模式,對當前分布域模型及以往遙測的模型賦予不同權值,實現檢測基準模型的動態加權。
2 ADMF算法
2.1 多維特征向量模板結構定義
航天器局部平穩遙測參數在時序散布圖中表現為有時間維度、帶明顯線性邊界的區域,呈現了數據統計分布的多重特性。因此,檢測模板以遙測參數時序散布圖的統計特性為基礎,通過統計分布域算子分別對統計分布的集中、離散等多統計分布特性進行描述,并將其有效融合,保留統計分布的特征信息。統計分布域由若干個域組成,每個域都表示各個時間序列點在特征空間的一種特性。通過分布域定義算子,實現在軌航天器遙測時序數據在統計分布域中的描述:

(1)
式(1)中:R為遙測散布圖;T為時間坐標;w為統計分布域窗寬;X={xt,xt+1,…,xt+w-1}為遙測從t時刻至t+w-1時刻的參數實值;l為遙測參數在統計分布域下的層值;f為遙測參數在t時刻、w窗寬下統計分布域第l層的特征值。
在分布域特征選取上,本文選取在軌航天器遙測參數統計分布的集中特征、離散特征、形狀特征和邊界特征,全面定義數據的統計分布特性。其中,集中特征能體現遙測數據總體分布的中心趨勢特性,反映了遙測數據向某一中心值靠攏的傾向;離散特征能體現遙測數據分布的散布特性,描述了遙測數據個體值之間參差不齊的程度,可以比較全面的表現遙測數據的變異情況;形狀特征能體現遙測數據的形態特性,描述了遙測數據分布的形狀是否對稱,偏斜的程度;邊界特征能體現遙測數據分布的邊緣特性,描述了遙測數據分布的形狀信息。
在分布域定義上,對于統計分布的集中特征可根據數據的統計分布特性,選擇均值、中位數進行描述;當數據呈現正態分布時,可選用均值進行描述;當數據分布呈現左偏或右偏時,常選用中位數進行描述;統計分布的離散特性可采用極差、四分位數極差以及數據的方差和標準差進行描述;四分位數極差常用于離群值顯著的數據,是一種穩健的數據散布描述;當數據值集中域范圍較窄且極端值個數較少時,方差或標準差能夠有效反映遙測數據總體分布狀態;而極差用于標識最大散布,易受極端值影響,不能反映全部數據分布狀態。因此,統計分布的離散特性選用四分位數極差與數據方差。統計分布的分布形狀特性采用偏度、峰度、偏斜度描述。其中偏度表示數據分布形態的不對稱性,反映數據分布的偏斜程度;峰度表示數據分布形態的尖銳性,反映數據分布的扁平程度;偏斜度表示遙測數據的偏斜方向以及偏斜程度。統計分布的邊界特性采用上邊界、下邊界描述。
采用分布域定義算子,得到了在軌航天器局部平穩遙測數據的集中分布子域Mc、離散分布子域Md、形狀分布子域Ms和邊界分布子域Mb,共同構成分布域聯合模型Mu,如圖2。
在w統計窗寬為常值的情況下,得到tl×(c+h+s+b)維的特征。其中:tl表示遙測時序數據大小;前c層表示集中分布層(值為2);后h層表示離散分布層(值為2);后s層表示形狀分布層(值為3);最后b層表示邊界分布層(值為2)。融合4類特征值的多維特征向量模板最大化地表現了遙測數據的統計分布特征。
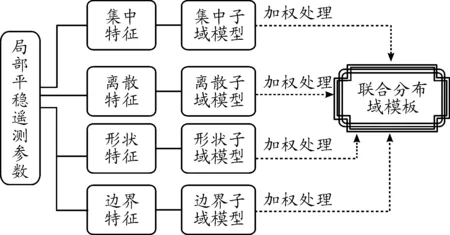
圖2 多維特征向量模板構建
2.2 構建聯合多分布域檢測基準模型
為進行在軌航天器局部平穩遙測數據的異常檢測,需要提取遙測正常樣本參數,依照多維特征向量模板,建立局部平穩遙測參數的聯合多分布域檢測基準模型。聯合多分布域檢測基準模型,描述的是在軌航天器遙測樣本參數的統計分布特性,由統計分布域的4類特征子域組成,其合適大小的統計窗口決定了遙測樣本參數分布特性描述的合理性與準確性,因此,統計窗寬的合理設置成為檢測基準模型構建的關鍵。
考慮在軌航天器遙測參數呈現一種以軌道周期為基準的起伏狀態,因此,在選擇統計窗寬時參考航天器軌道運行規律的影響,建立以軌道周期+時間間隔Δt為窗寬長度的方法。統計窗寬可描述為
W=Torbit+Δt
(2)
式(2)中:W為統計窗寬;Torbit為軌道周期;Δt為時間間隔。
對于當前時刻i,確定統計窗寬大小Wi后,其遙測樣本數據的基本統計窗口為DI={xi,xi+1,…,xi+wi-1}。根據此統計窗口的樣本數據,采用動態滑動窗模式,逐個構建檢測基準模型下的統計集中分布子域模型Mc、離散分布子域模型Mh、形狀分布子域模型Ms和邊界分布子域模型Mb。在軌航天器遙測參數統計分布域子域檢測基準模型通過的構建如表1。
考慮航天器局部平穩遙測參數發生異常時,其異變特性往往集中在遙測參數分布域的某一類或某幾類特征中,通常表現出明顯的異變幅值以及較長的異變時段。檢測基準模型的完整構建必須根據實時檢測過程中各分布特征的異變程度,對待檢測遙測特征進行動態加權,對異變明顯的分布域特征分配相對較大的權值,對異變不明顯的分布域特征分配相對較小的權值,以增加異變特征在檢測基準模型的影響力,增強區分度,提高模型檢測的準確性,獲取較精準的異變檢測時刻。遙測參數統計分布域特征通過下式動態加權:
(3)
σ1=Q2+2×(Q2+Q3)+ε
(4)
式(4)中ε為常數,通常取0.5。
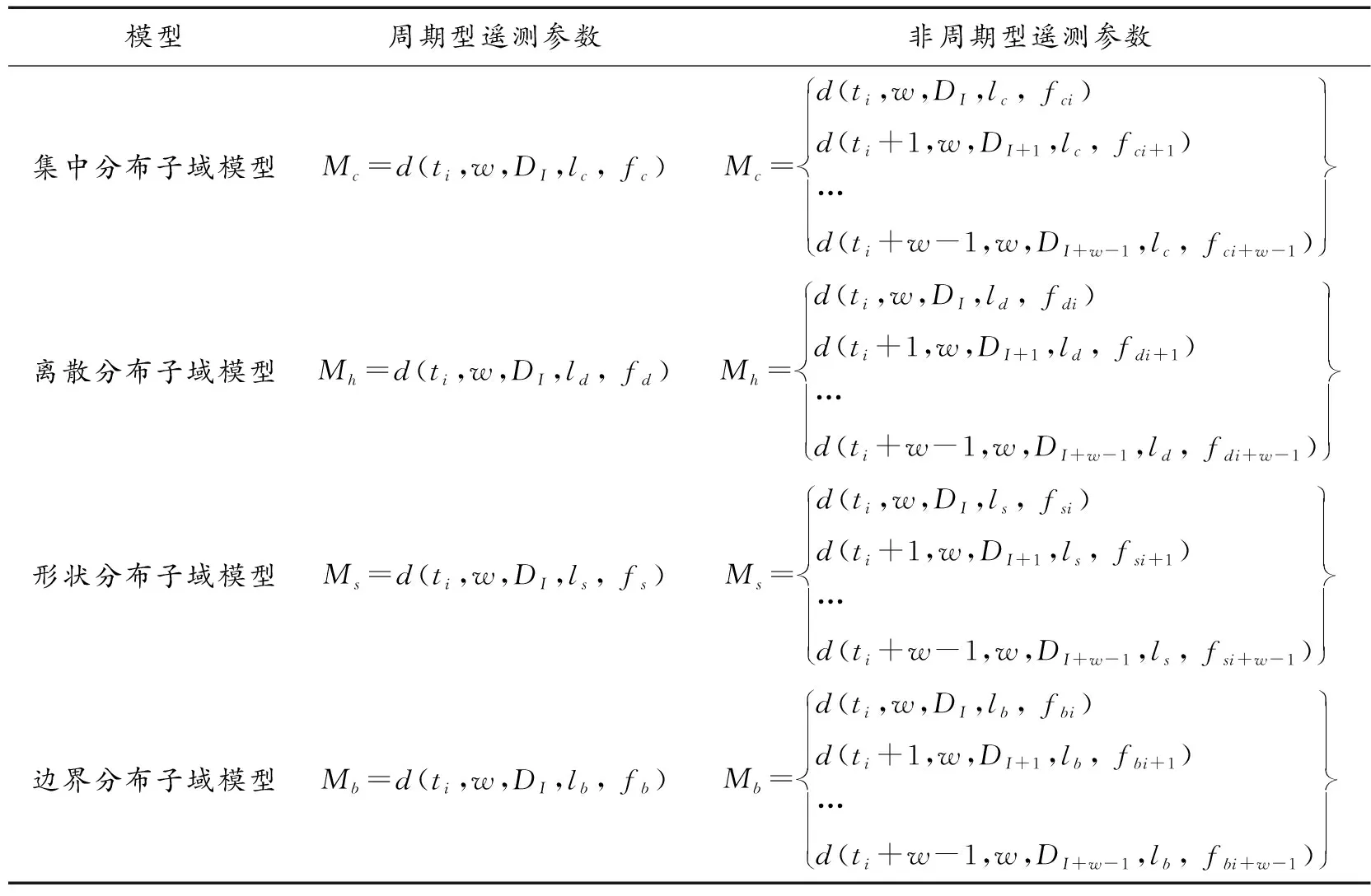
表1 統計分布域子域檢測基準模型
2.3 局部平穩遙測異常檢測
在軌航天器局部平穩遙測序列異常檢測前,需要對序列中存在的采樣間隔不等、實時遙測與延時遙測部分重復、噪聲/野值干擾等問題,進行插值、重采樣、濾波、去重等數據清洗工作,提高異常檢測結果的準確性。接著,由于同一軌道周期窗寬內的連續周期類與連續非周期類遙測序列的統計分布特性不同,因此,需要對清洗后的遙測序列數據分類,區分連續周期類遙測序列與連續非周期類遙測序列。其中,非連續周期類統計分布特性值,隨參數起始點位置的改變而變化;而連續周期類遙測參數,由于其周期特性,各統計分布特征值在同一軌道周期內保持固定不變,不會因參數起始點位置的變化而變化。因此需要依據2.1節中分類方法對清洗后的遙測時序數據進行數據分類,區分連續周期類遙測時序數據與連續非周期類遙測時序數據。
連續周期類局部平穩遙測時序數據,因其周期循環特性,各統計分布特征值在同一軌道周期內保持固定不變,待檢測模型與檢測基準模型為一對一關系,可直接進行異常檢測。具體檢測流程如下:
步驟1 建立待檢測遙測序列的統計分布模型,即采用滑動窗模式,將遙測序列劃定為一系列與檢測基準模型統計窗寬相同大小的子序列,依次提取各子序列的集中分布子域模型、離散分布子域模型、形狀分布子域模型和邊界分布子域模型。
步驟2 逐一計算待檢測子域模型與檢測子域模型的距離殘差di,得到距離殘差序列Si={di1,di2,…,din},獲取異變幅值最大值Ri_Max以及異變時長Li,并基于2Q準則,依據式(4),計算異常檢測門限閾值,獲取異常判定上限σi1。通過
計算各分布子域模型的待檢測子域模型與檢測子域模型的異常度yi,并通過
對異常度進行歸一化處理,獲取異變時長Li范圍內的異常度序列Sai={ui1,ui2,…,uil},計算獲取異常判定上限σi1時的異常度uiσ。
步驟3 通過式(3),計算各子域下的動態權值pi;通過式(5)求取綜合異常度值mk;
(5)
通過
σz=pkc×uσc+pkd×uσd+pks×uσs+pkb×uσb
求取綜合異常門限σz z。建立在軌航天器遙測時序數據聯合多分布域動態檢測基準模型M,見式(6)。
(6)
逐點求解動態檢測基準模型的綜合異常度的累積和,如果值超出σz,則計算停止,并判定該序列為異常序列,且當前時刻點為異常時刻點,否則繼續求解,直至超出異變時長Li范圍;如果值小于σz,則判定該序列為正常序列。
非連續周期類局部平穩遙測時序數據,隨參數起始點位置的改變而變化,待檢測模型與檢測基準模型為多對一關系,因此需要提前進行模型匹配,尋找與當前起始點位置下遙測待檢測模型相異度最小的檢測基準模型,再根據待檢測模型與最匹配聯合多分布域動態檢測基準模型的距離差進行異常檢測,后續步驟與上述連續周期類局部平穩遙測異常檢測步驟相同。
異常檢測算法設計模型如圖3所示。
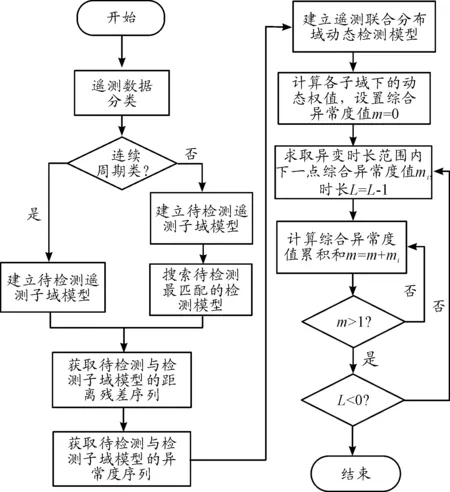
圖3 異常檢測算法設計模型
2.4 檢測基準模型動態加權
隨著航天器的在軌運行,為了能滿足遙測時序數據局部平穩條件,需要對檢測基準模型進行動態加權,以滿足遙測時序數據局部平穩條件。本文從在軌航天器遙測數據中尋找規律,采用數據驅動模式構建動態加權檢測基準模型。在動態加權基準模型構建中,對當前遙測時序數據構建分布域模型,以及以往遙測時序數據(通常取前兩次滑動數據窗)的基準模型進行加權。權重分配的原則是離當前時刻越遠權重越小,越近權重越大。通過下式實現檢測模板動態加權:
(7)
式(7)中:α為加權系數,通常取0到1之間的常數,即0<α<1;m為根據當前遙測時序數據構建的聯合多分布域檢測基準模型;mn-1,mn-2分別為前一次、前兩次滑動數據窗下的檢測基準模型。在檢測基準模型檢測結果正常的情況下,本文對當前遙測數據幀、前一次及前兩次滑動數據幀共3部分信息進行動態加權,以更新檢測基準模型,通過權重,設置對以往遙測數據的“記憶”長度來適應在軌航天器遙測數據序列的變化。
3 實驗及結果分析
3.1 實驗數據集及實驗設置
實驗硬件環境是Intel Core i3 3.30 GHz,內存3.37 Gb,操作系統為Windows XP,仿真軟件為Matlab 2011a。為驗證本文提出的融合多特征的在軌航天器局部平穩遙測加權分布異常檢測方法的有效性,實驗選取某型號在軌運行航天器的遙測傳感器參數,即某運行時段551 s下540組傳感器電壓參數序列X1(t)和傳感器電流參數序列X2(t),變化曲線如圖4所示。
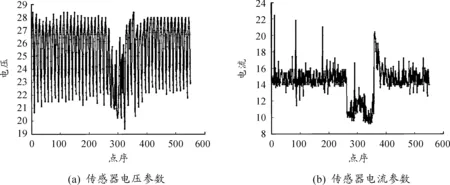
圖4 參與測試的在軌航天器局部平穩遙測參數序列曲線
由圖4可知:給定的遙測數據均為局部平穩序列,其中,傳感器分流電壓為連續周期類,傳感器電流參數為連續非周期類,數據曲線均存在形態、幅值、趨勢等異常信息。經數據整理、補點和潔化處理,消除間隔不等、局部重復和野值之后,從檢測精度、虛警率等兩方面進行實驗對比。
實驗分為兩部分:實驗1對比加權多分布特性與單一特征的異常檢測算法;實驗2對比動態加權參數的模型與未加權參數的模型。本節中的所有參數圖橫坐標為點序,縱坐標為歸一化后的無量綱單位。
3.2 加權多分布特性、單一特征及多特征檢測對比
實驗1對比ADMF、統計分布域下各單一特征(Single Feature,SF)及多特征(Multi Feature,MF)。傳感器電壓參數和傳感器電流參數統計分布域下不同分布子域特征模型如圖5所示,其異常度如圖6所示。其中,SF為統計分布域下單一特征的分布域異常檢測,實驗中取有普遍代表性的集中分布子域均值特征;MF是結合統計分布域集中特征、離散特征、形狀特征和邊界特征的分布域異常檢測,這部分實驗是為了突出多分布特征融合以及異常明顯特征加權的優勢。
ADMF,SF及MF在傳感器電壓參數和傳感器電流參數上的異常檢測結果如圖7所示。在圖4(a)傳感器電壓參數中,MF出現較大誤差,異常檢測結果不符合檢測要求,SF異常檢測結果次優,出現3次虛警。ADMF檢測異常時刻點提前于報警時刻點,與實際吻合,且無虛警,檢測結果最優。在圖4(b)傳感器電流參數中,MF出現1個點的檢測誤差和4次虛警,SF異常檢測結果優,但異常識別度不足。ADMF檢測結果與實際相符,且精度高,無虛警。因此,ADMF檢測效果最好。
ADMF,SF 及MF 在傳感器電壓參數和傳感器電流參數上的檢測正確率和檢測時間精度對比如表2所示,表中粗體代表精度最優,下劃線代表精度次優。
由表2可知:ADMF由于基于多分布特征及對密集特征進行加權處理,在這2個序列上獲得最優的檢測效果,其檢測精度與抑制虛警情況最優;在傳感器電壓參數中,ADMF的檢測時刻點為267點,比多特征MF提前8個點,比SF虛警率提高6個百分點;在傳感器電流參數中,ADMF的檢測時刻點為268點,比多特征MF 虛警率提高5.9個百分點,比SF提前1個點。
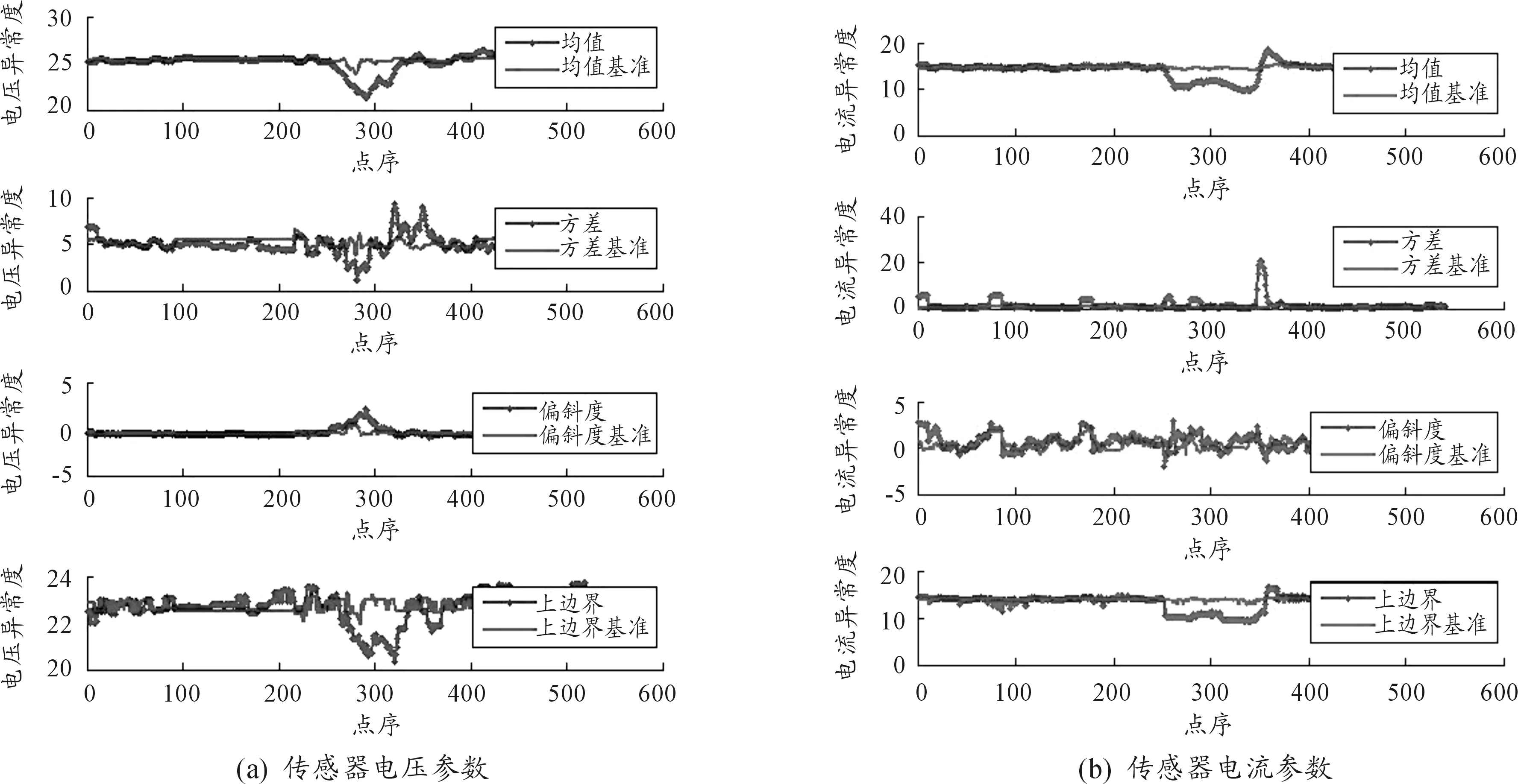
圖5 統計分布域下不同分布子域特征模型
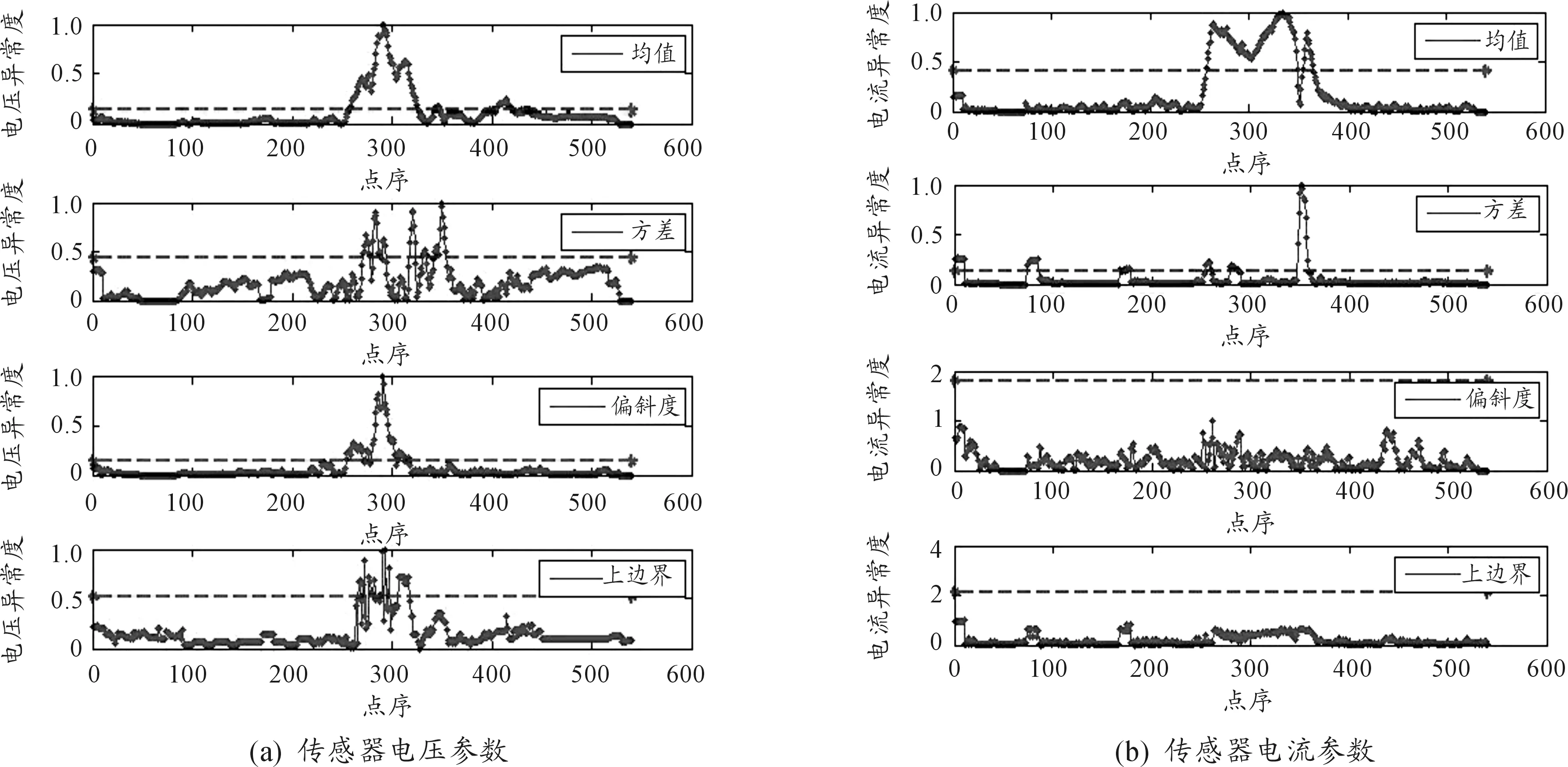
圖6 統計分布域下不同分布子域特征的異常度
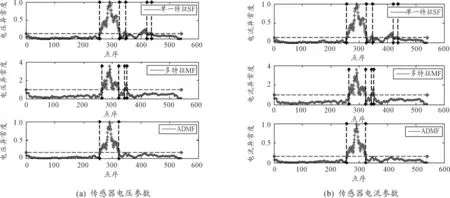
圖7 SF,MF及ADMF檢測對比
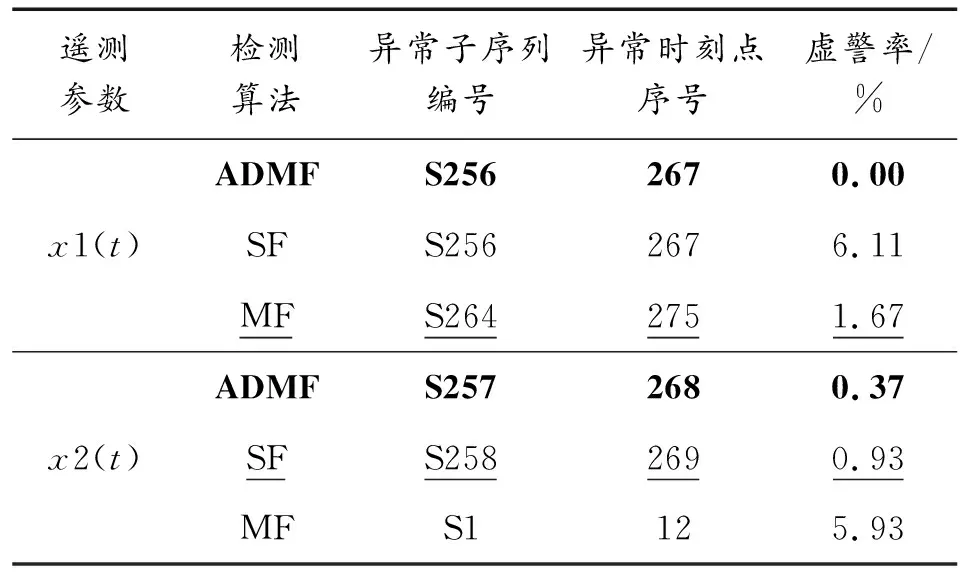
遙測參數檢測算法異常子序列編號異常時刻點序號虛警率/%x1(t)ADMFS2562670.00SFS2562676.11MFS2642751.67x2(t)ADMFS2572680.37SFS2582690.93MFS1125.93
3.3 動態加權模型參數分析
實驗2通過對檢測基準模型中加權系數α的動態設定,決定采用最新遙測數據幀的速率,體現在少量基于前兩次自適應檢測基準模型的基礎上,更多地考慮當前幀信息進行加權的重要性,這樣既保證檢測基準模型的記憶連續性,又考慮到數據的復雜變化特性。這部分實驗是為了分析本文采用的模型動態加權方式的合理性。
本實驗及前面的兩個對比實驗中,自適應檢測基準模型中α=0.6時的結果表示為ADMF1,也就是本文提出的檢測基準模型動態加權算法。當α=1時,用當前遙測數據幀構建的目標模型取代自適應目標模型,在實驗中表示為ADMF2。當α=0時,舍棄自適應檢測基準模型中當前遙測數據幀構建的模型信息,在實驗結果中表示為ADMF3。3種算法傳感器電壓參數和傳感器電流參數上的檢測結果如圖8所示,圖8中依次為ADMF1結果、ADMF2 結果以及ADMF3結果。在圖8(a)中, ADMF1檢測結果最優,異常時刻點為267點,無虛警;ADMF2檢測結果次優,虛警率為2.59個百分點;ADMF3虛警率最高,為5.91個百分點。在圖8(b)中,ADMF1、ADMF2檢測結果基本一致,無虛警;ADMF3檢測的虛警率為0.93個百分點。
ADMF1,ADMF2,ADMF3在傳感器電壓參數和傳感器電流參數上的異常檢測時刻點與虛警率的對比如表3所示,表中粗體代表誤差最小,下劃線代表誤差次小。
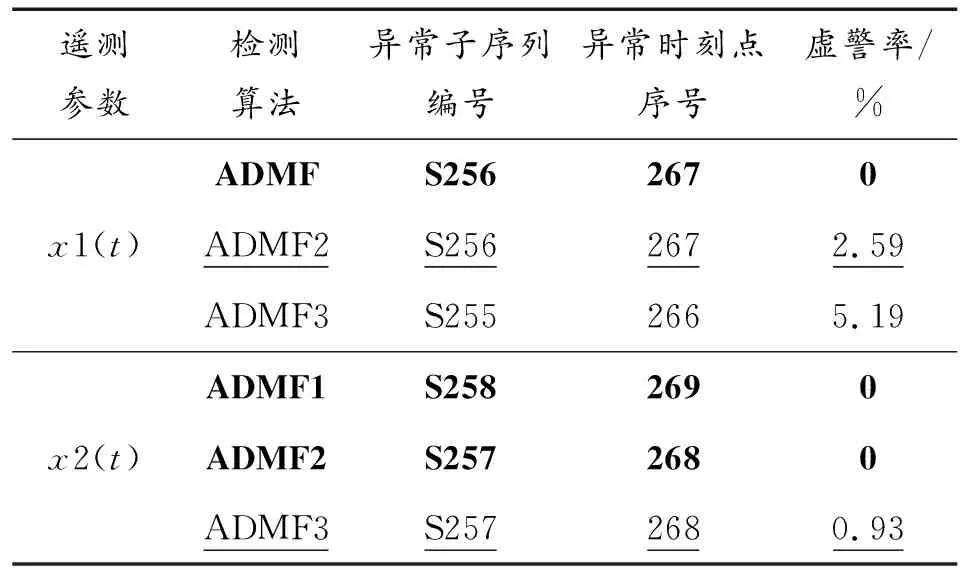
表3 局部平穩遙測數據集的異常檢測結果參數
由表3 可知:采用本文的檢測基準模型動態加權方式在這2個序列上獲得最優的檢測效果,檢測精度與抑制虛警情況最優;ADMF2在傳感器電流參數序列的檢測效果與ADMF1一致,在傳感器電壓參數序列的檢測效果次優。ADMF3檢測效果最次,虛警率最高。
3.4 實驗結果分析ADMF,SF 及MF
從SF,MF及ADMF的異常檢測對比可發現:MF檢測效果明顯優于SF,而ADMF檢測正確率最高,表明ADMF在融合特征空間分布的多種特征信息,并且考慮異常明顯特征的重要性后,取得較穩定的檢測效果。
在檢測基準模型動態加權參數設定分析的實驗表明:本文既考慮到檢測基準模型的連續性和穩定性,又考慮數據的變化特性,通過設置對以往遙測數據的“記憶”長度小部分基于以往檢測基準模型的基礎上,主要考慮當前幀的最新信息進行檢測模型的動態加權是合理的,與其他加權方式相比獲得相對較好的檢測效果。
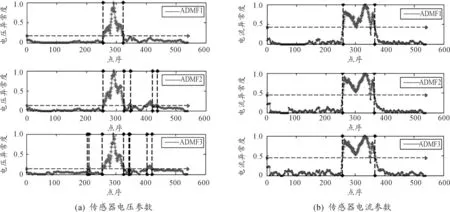
圖8 ADMF異常檢測
4 結論
1) 基于分布特性算子,提出結合統計分布的集中特性、離散特性、形狀特性和邊界特性等在軌航天器局部平穩遙測數據異常檢測算法,通過分布特性算子對各個特征的描述,較全面地提取了遙測數據的統計分布特征信息。
2) 通過對異常表現不同的分布特征進行加權,突出異常變化明顯特征在模型匹配中的作用,提高異常檢測的準確率。同時,為適應局部平穩遙測數據的變化特性,采用數據驅動模式進行檢測基準模型的動態加權,有效適應了復雜空間環境下航天器局部平穩遙測數據的變化需求。
3) 實驗表明:本文算法不僅在數據的形態、幅值、趨勢等方面具有良好地異常檢測能力,而且能有效降低虛警率,提高檢測準確性,可進行長時間有效的檢測。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
光學精密工程(2016年6期)2016-11-07 09:07:19