高精度直升機機載LiDAR在高速公路改擴建勘測中的應用可行性研究
2018-07-30 06:10:08鄭偉安
山東國土資源 2018年8期
鄭偉安
(山東省國土測繪院,山東 濟南 250102)
0 引言
近年來,社會經濟的快速發展對交通運輸能力的需求不斷增長,大批高速公路的新建、改擴建是“十三五”期間交通部門的一項重要工作[1]。高速公路改擴勘測是高速公路改擴建施工設計的基礎,旨在對現有高速公路實施現狀測量,獲取滿足高速公路改擴建測量工作對現有道路的高精度三維信息。
傳統的測量手段勞動強度大,生產周期長,成果精度低,需要大量人員現場作業,受場地影響較大,而LiDAR作為一種主動式對地觀測系統,集成激光測距技術、計算機技術、慣性測量單元(IMU) /DGPS差分定位技術于一體,可直接獲取高精度三維地表地形數據,具有自動化程度高、受天氣影響小、數據生產周期短、精度高、非接觸等特點,為獲取高時空分辨率地球空間信息提供了一種全新的技術手段[2-6],彌補了傳統技術手段的不足[7]。
測繪工作者對LiDAR在道路勘測方面的應用進行了多項探索。魏國忠等[8]利用車載移動測量系統進行了公路勘測點云精度可行性分析,黃華平等[9]對利用機載LiDAR在鐵路勘測中的應用進行了研究。直升機因其起飛場地限制小、低空低速等優點,通過直升機機載LiDAR運用正確的技術方法可獲取符合高速公路改擴建要求的點云密度和精度。
該文以京藏高速公路改擴建工程為背景,闡述了基于直升機機載LiDAR設備開展LiDAR點云數據獲取、處理及多元數據成果應用的整個技術流程,并對5種不同地面控制點布設方案下的點云精度改正進行了可行性分析。
1 總體技術路線
使用直升機機載LiDAR系統,按照設定的最佳飛行高度和速度,獲取高精度、高密度的機載LiDAR測量原始數據成果,由地面基站數據和POS數據進行差分解算,得到飛機飛行軌跡線數據,將軌跡線文件、激光測距數據和系統數據進行聯合解算,生成原始點云數據。高速公路改擴建所需點云數據平面位置中誤差要求優于5cm,高程中誤差要求優于2cm。原始點云經過坐標基準轉換后[10],根據地面控制點的坐標及高程,進行平面坐標改正和高程擬合改正,得到滿足高速公路改擴建精度要求的超高精度的直升機機載LiDAR點云數據,在此基礎上進行處理制作生成數字高程模型、數字地面模型、數字線劃圖、實景三維數據、道路邊線、縱橫斷面數據、構造物工點圖等,總體技術路線如圖1所示。
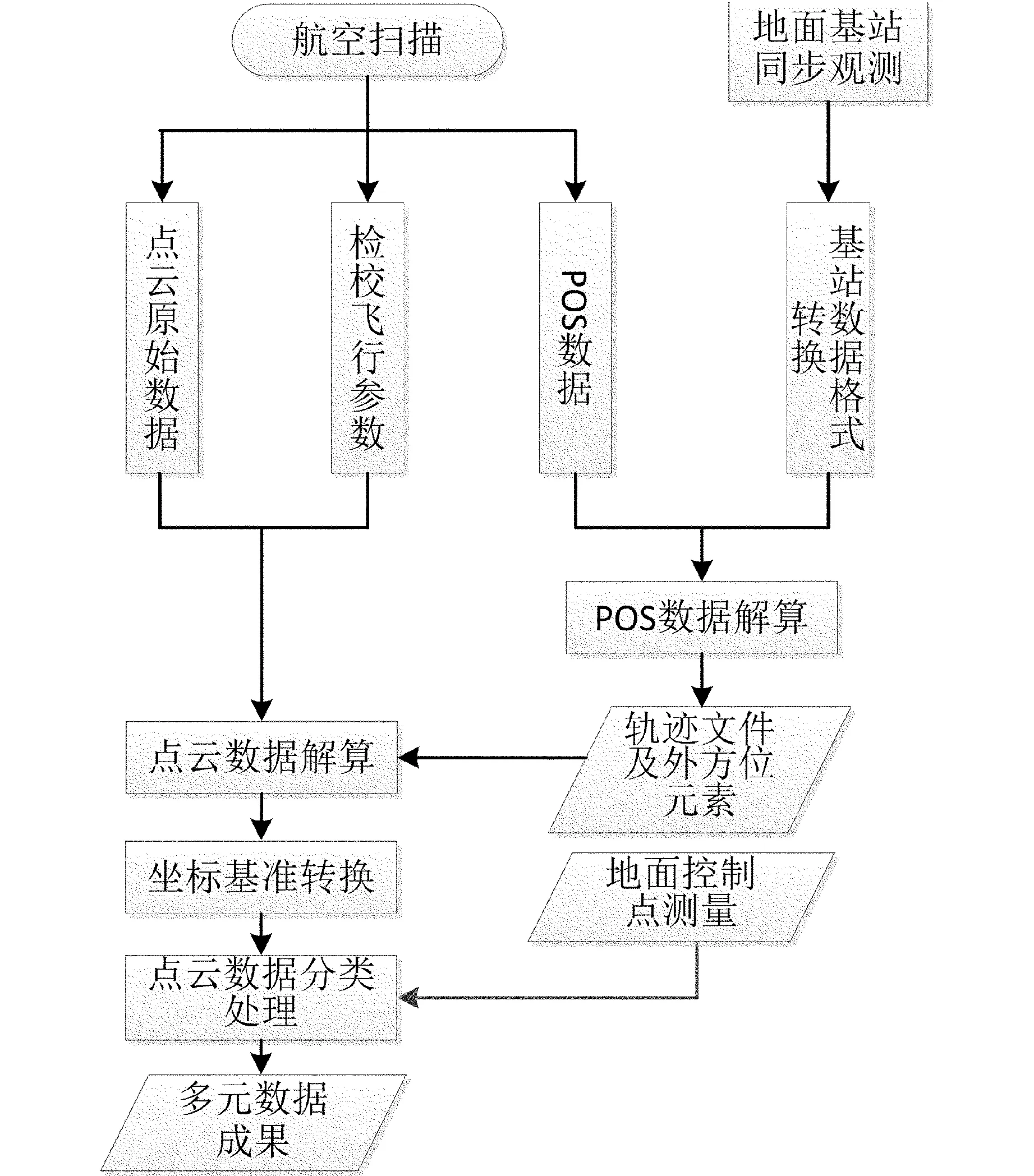
圖1 LiDAR點云獲取與處理技術路線圖
2 地面控制測量
LiDAR點云數據平面和高程精度較高,但仍不能滿足高速公路改擴建的精度需要。需要通過地面控制點對LiDAR點云數據進行平面坐標改正和高程擬合改正,使其達到需要的精度指標。
2.1 地面控制點布設
點云數據獲取前應在高速公路應急車道均勻交叉布設地面控制點。為充驗證不同地面控制點布設方案下點云坐標精度改正的可行性,控制點布設間距為200m。考慮到地面控制點易辨識,便于噴涂、測量工作量小等要求,采用了三角靶標進行了地面控制點布設,靶標形狀為對三角形,規格尺寸為1.5m×1.5m,距路肩邊緣線不小于50cm,測量位置為對三角中心點。
2.2 地面控制點測量
使用Trimble 5800 GPS采用GPS-RTK技術獲取地面控制點的平面坐標和大地高,每點均測量2次,取其平均值作為最終結果。2次測量成果平面校差不大于3cm,相鄰基準站間應聯測1~2個公共點進行檢核,檢核點校差平面位置不大于3cm。地面控制點高程按照四等水準測量方法及要求采集,水準路線布設成附合水準路線,困難地區布設支線,支線要求采用往返觀測。
3 數據獲取
基于Bell 206直升飛機平臺,搭載Optech Orion H300型號機載LiDAR設備開展LiDAR點云數據獲取工作。
3.1 航線敷設
3.1.1 設計要求
航線沿高速路中線分段敷設,考慮到IMU累計誤差的影響,每段飛行時間不超過15min[10]。根據高速路彎曲度,每段航線宜分為首尾相接的小段,小段長度為50~100m為宜,小段之間的夾角不宜超過15°。點云坐標改正程序算法要求每個分段包含的控制點數量不宜少于4個,相鄰分段重疊1km,且公共控制點不少于1個。
3.1.2 設計參數
為了準確提取高速路三維信息,點云數據獲取原則是在保證點云精度的前提下盡量提高點云密度。點云精度與航高成正比,公式如下:
(1)
式中:dxy為點云平面中誤差(標稱精度);ρ為比例系數;H為相對航高。以Orion H300型機載LiDAR為例,ρ值為5500,航高約275m時,點云平面中誤差小于5cm,符合技術指標要求。
3.2 基站布設
基站GPS接收機的性能應與機載GPS接收機性能匹配,使用具有帶抑徑板或抑徑圈的GPS信號接收天線的高精度測量型雙頻GPS接收機,最小采樣間隔不大于1s;基站GPS接收機沿道路兩側布設,攝區內任意位置與最近基站間的距離不大于5km[10];基站設置后,按照GPS C級點的要求與周邊已有的高等級控制點進行同步觀測,精確計算站址三維坐標。
3.3 安置角誤差的測定
安置角誤差是IMU系統與激光掃描儀的角度安置差[10],是機載LiDAR系統中最大的系統誤差,檢校飛行的目的是為了求出LiDAR與航攝儀的安置角誤差,進而聯合POS數據求出點云腳點位置和相片的外方位元素。安置角誤差采用重疊航帶法測定。原理是先在重疊航帶之間自動提取連接面,并獲得連接面的重心坐標,以重心坐標作為不同航帶的連接點。然后根據連接面重心坐標之間的差異和激光腳點的觀測方程建立誤差方程。最后利用最小二乘原理,求解安置角誤差的最優估計值[11]。檢校場選擇攝區附近有“人”字型房頂的廠房或居民區,檢校飛行方案采用“十”字形對飛,參數與路面點云獲取參數相同。
3.4 飛行實施
3.4.1 飛行準備
機載LiDAR和GPS天線安裝后,采用全站儀測定GPS天線相位中心至LiDAR量測參考點的偏心分量,3次量測誤差要求不大于5cm時,取平均值作為最終結果;飛行時,可見衛星數應大于6顆,PDOP因子應小于3;飛機在進入跑道前,在開闊地區進行少量動態滑行,以便設備初始化,并在IMU/DGPS慣導系統開始記錄后停止滑行,進行5min的靜態GPS觀測。
3.4.2 飛行要求
為避免IMU誤差積累,進入測區前,飛機應先平飛3~5min,再做“8”字飛行,飛行結束后,應先做“8”字飛行,再平飛3~5min[11];在一條航線內航高變化不超過相對航高的5%~10%,實際航高變化不超過設計航高的5%~10%,在一條航線內,飛機上升、下降速率不大于10m/s。
4 數據處理
4.1 數據預處理
首先基于POS數據與地面基站數據,采用單基站緊密耦合算法求出飛行軌跡線文件,然后對激光測距數據聯合軌跡線數據,附加檢校數據,進行聯合解算,得出WGS-84坐標系統下的原始點云數據,接著采用布爾沙模型將激光點云由WGS-84坐標系轉換至工程坐標系,最后按照規定的投影方式和中央子午線,將其投影至平面坐標系統[12]。
4.2 點云精度改正
前期通過GPS-RTK和水準測量方式,精確獲取了地點控制點的平面坐標和高程信息,目的就是為了使用地點控制點的平面坐標和高程,對預處理后的LiDAR點云數據進行精度改正。
4.2.1 平面坐標改正
基于點云強度信息,對布設的地面控制點靶標進行判讀,采用分段仿射變換方法對預處理后的點云平面坐標進行改正,校正公式如下:
(2)
式中:(X,Y)T為校正后點云平面坐標;(x0,y0)T為校正前點云平面坐標;a,b,c,d,dx,dy為仿射變換參數。
4.2.2 高程擬合改正
采用解析內插法將點云高程的大地高轉換至正常高。首先根據控制點的大地高和正常高值,求出控制點處的點云高程異常值,再根據控制點的平面坐標和高程異常值,然后采用三次樣條函數,擬合出沿高速路中線方向的高程異常分布曲線,通過內插的方式求出相應位置的點云高程異常,進而求出點云正常高[13-14]。
設每段點云有n個控制點,高程異常值f(xi)和控制點平面坐標xi在區間[xi,xi+1](i=1,2,…,n-1)上有3次樣條函數關系:
f(x)=f(xi)+(x-xi)f(xi,xi+1)+(x-xi)
(x-xi+1)f(x,xi,xi+1)
(3)
式中:x為點云平面坐標;f(xi,xi+1)為一階差商;f(x,xi,xi+1)為二階差商。
4.3 點云分類
經過預處理和坐標轉換的點云還存在大量的非地面點,需要經過噪聲點濾除、自動分類、人工編輯分類3個操作步驟[12-13,15],對點云數據進行分類處理,得到符合技術要求的LiDAR點云數據。
(1)噪聲點濾除。采用高程比較算法去除噪聲。將一個或一組點與周邊一定范圍內的點進行比較,若明顯低于或超過一定的閾值,則將該點或該組點判斷為噪聲點,然后作濾除處理。
(2)自動分類。即粗分類,采用Terrasolid軟件,首先使用提取地面點云算法,從較低的激光點中提取初始地表面;然后基于初始地表面,設置地面坡度閾值進行迭代運算,直至找到合理的地面;接著利用去除高程異常點算法,將導致地形陡升的激光點從地面點云中去除,將導致地形陡降的激光點云數據從其他層中重分類為地面點云,保證獲取完整連續的地面;最后基于反射強度、回波次數、地物形狀等算法或算法組合,對激光點云數據進行自動分類[15-17]。
(3)人工編輯分類。對自動分類后點云參照粗略正射影像進行手動精細分類。主要包括對高程突變的區域調整參數和算法重新進行小面積的精細分類、采用人工編輯的方式對分類錯誤的點進行重分類[17]。
5 精度分析與成果應用
5.1 精度分析
高速公路改擴建對點云數據的高程精度要求較高,因此該文對使用不同地面控制點布設方案精度改正后的點云數據平面和高程精度都進行對比分析。
5.1.1 平面中誤差
在高速路兩側應急車道均勻交叉布設地面控制點272個,點間距為200m。為了驗證地面控制點布設方案經濟性和可行性,分別按間距為400m~4km的5種控制點布設方案對點云進行坐標改正,未用于坐標精度改正的控制點用于檢核改正后的點云平面坐標。不同控制點布設方案改正后的點云平面中誤差及平面粗差率如表1所示。

表1 點云平面中誤差及粗差率統計
5.1.2 高程中誤差
采用400m~4km的5種控制點布設方案對點云數據進行高程擬合改正。為保證高程檢測精度,沿高速兩側應急車道采集了2062個高程檢測點,點間距為20m,用于高程精度檢測,擬合后的點云高程中誤差如表2所示。
由上述分析可見,采用5種控制點布設方案進行點云平面改正和高程擬合,均能滿足項目設計的要求,考慮到高速公路改擴建對精度的特殊要求及其他一些不確定性因素,地面控制點間距在2~3km時較為經濟合理,對于丘陵、山地、高山地等地形區域,由于高程異常變化較大,可適當縮短地面控制點間距。

表2 點云高程中誤差及粗差率統計
5.2 成果應用
對機載LiDAR獲取的高精度、高密度點云數據進行加工處理,形成豐富的多元數據成果,滿足高速公路改擴建施工設計的需要。多元數據成果包括:數字高程模型、數字表面模型(DSM)、等高線及高程點成果、實景三維等。
數字高程模型是高速公路設計中最重要的數據,是進行高速公路地形分析、坡度分析的基礎。利用處理完成的高精度的點云數據,使用ArcGis、Global Mapper、航天遠景、JX4、EPS、Geoway、CASS、TerraSolid等軟件[18-19],可進行高程自動提取及高程注記點提取。利用同一空間基準下的點云數據、數字表面模型(DSM)、數字高程模型和數字正射影像,將這些數據進行疊合處理,可獲取公路可量測的實景三維成果數據[19-20],為設計人員提供了直觀豐富的數據信息。
構造物工點是高速公路改擴建中重要的測量任務之一,其中橋梁伸縮縫的測量是橋梁設計的基礎,精度要求高,施測難度較大。基于機載LiDAR數據的點云強度信息,能夠精確辨識伸縮縫的位置,提取出橋梁伸縮縫的三維空間信息。
斷面數據是實施高速公路改擴建設計重要數據。基于機載LiDAR獲取的高密度、高精度的點云數據可以任意提取道路斷面數據,為高速公路提供精細化、全方位的三維數據基礎,幫助設計人員更加準確的計算路基填挖方工程量、道路坡度及改擴建道路拼寬數據。
即有道路的邊線是設計人員進行道路曲線設計和中線擬合的關鍵數據,基于路面高精度LiDAR點云數據,根據點云強度信息及路緣石和瀝青交界處的高差,采用基于k-d樹的鄰域搜索算法,自動提取道路兩側以及中央隔離帶兩側硬路肩邊界特征線數據,可為高速公路改擴建設計提供可靠的邊線成果。
6 結語
結合京藏高速公路改擴建勘察設計工程,論證了直升機機載LiDAR在高速公路改擴建中應用技術路線的可行性。形成一套基于直升機機載LiDAR測量系統進行高速公路建設工程測量工作的完整、高效、安全的解決方案,可有效減少高速公路新建、改擴建工程測量工作量,顯著提升工作效率,尤其是機載LiDAR具有非接觸測量特點,可大大降低安全隱患,保障了測繪作業人員的人身安全,適于公路、鐵路、河流、山川等較為危險、人員不適合進入或難以進入的作業區域,受到了廣大業主單位和測繪單位青睞,具有廣闊的應用前景和發展潛力。
猜你喜歡
建材發展導向(2021年20期)2021-11-20 05:43:18
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
小學閱讀指南·低年級版(2017年11期)2017-12-06 15:14:59
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中國交通信息化(2016年9期)2016-06-06 07:42:10
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
小說月刊(2014年4期)2014-04-23 08:52:20
河南科技(2014年18期)2014-02-27 14:15:06
