考慮第一類(lèi)兩難區(qū)的黃燈信號(hào)時(shí)長(zhǎng)優(yōu)化
2018-07-30 10:12:22張亞平祁首銘
張亞平, 溫 良,祁首銘,莫 瓊
(哈爾濱工業(yè)大學(xué) 交通科學(xué)與工程學(xué)院,黑龍江 哈爾濱 150090)
0 引 言
交叉口是城市道路中發(fā)生車(chē)流沖突的主要區(qū)域,其中直行車(chē)流和左轉(zhuǎn)車(chē)流是沖突產(chǎn)生的主要因素。為了減少車(chē)流沖突對(duì)交叉口交通的影響,保證交叉口行車(chē)安全,多數(shù)信號(hào)控制交叉口均采用設(shè)置左轉(zhuǎn)專(zhuān)用相位的方式,從運(yùn)行時(shí)間上分離沖突車(chē)流,同時(shí)配合專(zhuān)用車(chē)道,有效提高了交叉口的運(yùn)行效率,減少了因?yàn)檐?chē)流沖突發(fā)生交通事故的可能性。信號(hào)控制方式的引入特別是黃燈信號(hào)的應(yīng)用,產(chǎn)生的兩難區(qū)問(wèn)題卻成為誘發(fā)交叉口交通事故的潛在不安全因素。合理設(shè)置黃燈信號(hào)時(shí)長(zhǎng),對(duì)于消除第一類(lèi)兩難區(qū),確保交叉口車(chē)輛運(yùn)行安全至關(guān)重要。
目前,對(duì)于左轉(zhuǎn)專(zhuān)用相位的黃燈信號(hào)時(shí)長(zhǎng)設(shè)置,通常與直行相位相同。北京地區(qū)基本采用4 s,美國(guó)采用3~6 s,德國(guó)根據(jù)進(jìn)口道限速值的不同,分別取3、4和5 s[1]。現(xiàn)有的黃燈信號(hào)時(shí)長(zhǎng)計(jì)算模型中涉及到駕駛?cè)藳Q策行為的變量,例如行駛速度、加速度以及感知反應(yīng)時(shí)間往往取定值[2]。運(yùn)用這些模型計(jì)算出來(lái)的黃燈信號(hào)時(shí)長(zhǎng)并不能與駕駛?cè)说臎Q策行為相適應(yīng),有可能會(huì)導(dǎo)致車(chē)輛陷入第一類(lèi)兩難區(qū),增加交通事故發(fā)生的可能性。國(guó)內(nèi)對(duì)于黃燈信號(hào)時(shí)長(zhǎng)的研究不多,關(guān)于左轉(zhuǎn)專(zhuān)用相位的黃燈信號(hào)時(shí)長(zhǎng)研究更是少之又少。采用視頻觀測(cè)法對(duì)限速值為60 km/h的城市干道典型信號(hào)交叉口直行相位和左轉(zhuǎn)專(zhuān)用相位黃燈期間進(jìn)口道車(chē)輛進(jìn)行觀測(cè),基于觀測(cè)數(shù)據(jù)對(duì)直行相位和左轉(zhuǎn)專(zhuān)用相位第一類(lèi)兩難區(qū)進(jìn)行建模,研究黃燈期間車(chē)輛運(yùn)行狀態(tài),以期為直行相位和左轉(zhuǎn)專(zhuān)用相位黃燈信號(hào)時(shí)長(zhǎng)優(yōu)化設(shè)置提供理論依據(jù)。
1 數(shù)據(jù)采集
選取哈爾濱市學(xué)府路-保健路和學(xué)府路-學(xué)府東四道街兩個(gè)十字信號(hào)交叉口作為視頻觀測(cè)點(diǎn),其直行與左轉(zhuǎn)相位黃燈信號(hào)時(shí)長(zhǎng)均為3 s。觀測(cè)點(diǎn)滿(mǎn)足以下條件:交叉口限速值為60 km/h;進(jìn)口道信號(hào)有左轉(zhuǎn)專(zhuān)用相位和左轉(zhuǎn)專(zhuān)用車(chē)道;進(jìn)口道視距良好、無(wú)遮擋;進(jìn)口道上游有人行天橋作為攝像機(jī)架設(shè)點(diǎn)。
在進(jìn)口道上游天橋選擇最佳位置,架設(shè)攝像機(jī),記錄目標(biāo)車(chē)道交通流狀態(tài)。視頻觀測(cè)如圖1。為了避免天氣等其他因素干擾觀測(cè)結(jié)果,觀測(cè)時(shí)間選定為天氣晴朗工作日下午14:00—18:00,每個(gè)交叉口連續(xù)觀測(cè)3個(gè)工作日。

圖1 視頻觀測(cè)示意Fig. 1 Video observation

2 第一類(lèi)兩難區(qū)建模
對(duì)黃燈信號(hào)時(shí)長(zhǎng)、行駛速度、周期時(shí)長(zhǎng)與感知反應(yīng)時(shí)間、制動(dòng)減速度、行駛加速度分別做相關(guān)性檢驗(yàn)后發(fā)現(xiàn),只有行駛速度為顯著因素。因此應(yīng)用SPSS分析軟件選擇線(xiàn)性函數(shù)、對(duì)數(shù)函數(shù)、倒數(shù)函數(shù)、冪函數(shù)、S型函數(shù)、指數(shù)函數(shù)分別構(gòu)建制動(dòng)反應(yīng)時(shí)間-行駛速度模型、制動(dòng)減速度-行駛速度模型、行駛加速度-行駛速度模型。
根據(jù)文獻(xiàn)資料顯示,制動(dòng)反應(yīng)時(shí)間隨黃燈啟亮瞬間車(chē)輛與停車(chē)線(xiàn)之間距離增大而減小[4]。因此選擇黃燈啟亮?xí)r不同速度到達(dá)的車(chē)輛至停車(chē)線(xiàn)距離最小的47組直行首停車(chē)和29組左轉(zhuǎn)首停車(chē)數(shù)據(jù)作為模型構(gòu)建的數(shù)據(jù)。擬合結(jié)果如表1。
擬合結(jié)果表明:線(xiàn)性函數(shù)和指數(shù)函數(shù)分別可以較好地表征直行首停車(chē)和左轉(zhuǎn)首停車(chē)制動(dòng)反應(yīng)時(shí)間與行駛速度之間的關(guān)系。擬合得到的模型與文獻(xiàn)[4]研究結(jié)果感知反應(yīng)時(shí)間隨行駛速度增大而減小相一致。因此直行和左轉(zhuǎn)制動(dòng)反應(yīng)時(shí)間-行駛速度模型可以分別表示為

表1 制動(dòng)反應(yīng)時(shí)間-行駛速度模型擬合結(jié)果Table 1 Fitting results of braking response time and running speed model
δS=4.408-0.042V0
(1)
δL=6.642e-0.055 3V0
(2)
現(xiàn)有研究成果表明:制動(dòng)減速度隨黃燈啟亮瞬間車(chē)輛與停車(chē)線(xiàn)之間距離增大而減小[5]。因此僅選擇黃燈啟亮?xí)r不同速度到達(dá)的車(chē)輛至停車(chē)線(xiàn)距離最小的65組直行和31組左轉(zhuǎn)首停車(chē)數(shù)據(jù)作為模型構(gòu)建的數(shù)據(jù)。擬合結(jié)果如表2。

表2 制動(dòng)減速度-行駛速度模型擬合結(jié)果Table 2 Fitting results of braking deceleration and running speed model
擬合結(jié)果表明:指數(shù)函數(shù)和線(xiàn)性函數(shù)分別可以較好地表征直行首停車(chē)和左轉(zhuǎn)首停車(chē)制動(dòng)減速度與行駛速度之間的關(guān)系。擬合得到的模型與文獻(xiàn)[5]研究結(jié)果制動(dòng)減速度隨行駛速度增大而增大相一致。因此直行和左轉(zhuǎn)制動(dòng)減速度-行駛速度模型可以分別表示為
dS=0.399e0.031V0
(3)
dL=0.846+0.049V0
(4)
統(tǒng)計(jì)資料表明,行駛加速度隨黃燈啟亮瞬間車(chē)輛與停車(chē)線(xiàn)之間距離增大而減小[6]。因此僅選擇黃燈啟亮?xí)r不同速度到達(dá)的車(chē)輛至停車(chē)線(xiàn)距離最小的75組直行和28組左轉(zhuǎn)末行車(chē)數(shù)據(jù)作為模型構(gòu)建的數(shù)據(jù)。冪函數(shù)、S型函數(shù)和指數(shù)函數(shù)具有非負(fù)性不適用加速度為負(fù)值的情形。擬合結(jié)果如表3。

表3 行駛加速度-行駛速度模型擬合結(jié)果Table 3 Fitting results of running acceleration and running speed model
擬合結(jié)果表明:線(xiàn)性函數(shù)和對(duì)數(shù)函數(shù)可以較好地表征直行末行車(chē)和左轉(zhuǎn)首停車(chē)行駛加速度與行駛速度之間的關(guān)系。擬合得到的模型與現(xiàn)有研究結(jié)果行駛加速度與行駛速度存在負(fù)相關(guān)關(guān)系相一致[6]。因此直行和左轉(zhuǎn)行駛加速度-行駛速度模型可以分別表示為
aS=7.254-0.117V0
(5)
aL=3.187-0.932lnV0
(6)
第一類(lèi)兩難區(qū)經(jīng)典GHM模型[7]:
(7)
式中:XS為黃燈啟亮?xí)r車(chē)輛開(kāi)始制動(dòng)至完全停止的最小距離;XC為黃燈時(shí)間內(nèi)車(chē)輛行駛的最大距離V0為黃燈啟亮?xí)r刻瞬間速度;δ為制動(dòng)感知反應(yīng)時(shí)間;d為制動(dòng)減速度;a為行駛減速度;τ為黃燈信號(hào)時(shí)長(zhǎng)。
將公式(1)~式(6)分別代入式(7),得到直行相位和左轉(zhuǎn)專(zhuān)用相位第一類(lèi)兩難區(qū)模型:
(8)
(9)
3 黃燈信號(hào)時(shí)長(zhǎng)優(yōu)化
根據(jù)第一類(lèi)兩難區(qū)的定義:當(dāng)XC小于XS時(shí)形成第一類(lèi)兩難區(qū)[8]。為明確限速值為60 km/h交叉口第一類(lèi)兩難區(qū)分布情況,以及兩難區(qū)與黃燈信號(hào)時(shí)長(zhǎng)和行駛速度之間的關(guān)系,利用MATLAB繪制XC-XS函數(shù)圖像,如圖2和圖3。

圖2 直行相位第一類(lèi)兩難區(qū)分布Fig. 2 TypeⅠdilemma zone distribution of the straight phase
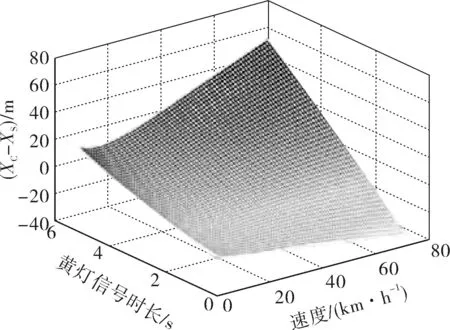
圖3 左轉(zhuǎn)專(zhuān)用相位第一類(lèi)兩難區(qū)分布Fig. 3 TypeⅠdilemma zone distribution of the exclusive left-turn phase
從圖中可以看到,不論是直行相位還是左轉(zhuǎn)專(zhuān)用相位第一類(lèi)兩難區(qū)的速度分布區(qū)間隨著黃燈信號(hào)時(shí)長(zhǎng)的增加而變小,這表明延長(zhǎng)黃燈信號(hào)時(shí)長(zhǎng)可以有效消除第一類(lèi)兩難區(qū)。當(dāng)黃燈信號(hào)時(shí)長(zhǎng)一定時(shí),駕駛?cè)讼萑氲谝活?lèi)兩難區(qū)的風(fēng)險(xiǎn)隨著速度的增加先增大后減小。當(dāng)直行相位黃燈信號(hào)時(shí)長(zhǎng)大于4.9 s時(shí),可以完全消除第一類(lèi)兩難區(qū);當(dāng)左轉(zhuǎn)專(zhuān)用相位黃燈時(shí)長(zhǎng)大于3.4 s時(shí),可以有效消除第一類(lèi)兩難區(qū)。
為進(jìn)一步確定合理的黃燈信號(hào)時(shí)長(zhǎng),分別給出黃燈信號(hào)時(shí)長(zhǎng)為3、4、5 s時(shí)的兩難區(qū)邊界曲線(xiàn),如圖4和圖5。


圖4 不同黃燈信號(hào)時(shí)長(zhǎng)下直行相位第一類(lèi)兩難區(qū)邊界Fig. 4 TypeⅠdilemma zone boundary of the exclusive left-turn phase with different yellow signal duration
當(dāng)黃燈信號(hào)時(shí)長(zhǎng)為3 s時(shí),位于直行車(chē)道上的駕駛?cè)酥挥挟?dāng)駛?cè)虢徊婵谶M(jìn)口道速度小于19 km/h時(shí),才能有效避免陷入第一類(lèi)兩難區(qū)。而對(duì)直行車(chē)行駛速度的統(tǒng)計(jì)分析發(fā)現(xiàn),首停車(chē)15%位車(chē)速為20.54 km/h,末行車(chē)15%位車(chē)速為20.65 km/h,即若黃燈信號(hào)時(shí)長(zhǎng)為3 s,則只有少于15%的駕駛?cè)丝梢栽诓徽{(diào)整車(chē)輛行駛狀態(tài)的條件下避免陷入第一類(lèi)兩難區(qū)。當(dāng)黃燈信號(hào)時(shí)長(zhǎng)為4 s時(shí),位于直行車(chē)道上的駕駛?cè)酥挥挟?dāng)駛?cè)虢徊婵谶M(jìn)口道速度小于32 km/h時(shí),才能有效避免陷入第一類(lèi)兩難區(qū)。而對(duì)直行車(chē)行駛速度的統(tǒng)計(jì)分析發(fā)現(xiàn),首停車(chē)50%位車(chē)速為30 km/h,末行車(chē)50%位車(chē)速為32.20 km/h,即若黃燈信號(hào)時(shí)長(zhǎng)為4 s,則只有少于50%的駕駛?cè)丝梢栽诓徽{(diào)整車(chē)輛行駛狀態(tài)的條件下避免陷入第一類(lèi)兩難區(qū)。當(dāng)黃燈信號(hào)時(shí)長(zhǎng)為5 s時(shí),可以完全保證駕駛?cè)瞬幌萑氲谝活?lèi)兩難區(qū)。故對(duì)限速值為60 km/h交叉口,直行相位黃燈信號(hào)時(shí)長(zhǎng)宜設(shè)置為5 s。

圖5 不同黃燈信號(hào)時(shí)長(zhǎng)下左轉(zhuǎn)專(zhuān)用相位第一類(lèi)兩難區(qū)邊界Fig. 5 TypeⅠdilemma zone boundary of the exclusive left-turn phase at different yellow signal duration
當(dāng)黃燈信號(hào)時(shí)長(zhǎng)為3 s時(shí),位于左轉(zhuǎn)車(chē)道上的駕駛?cè)酥挥挟?dāng)駛?cè)虢徊婵谶M(jìn)口道速度大于38 km/h時(shí),才能避免陷入第一類(lèi)兩難區(qū)中。對(duì)比左轉(zhuǎn)車(chē)行駛速度的統(tǒng)計(jì)分析結(jié)果,首停車(chē)和末行車(chē)分別只有30.8%和29.7%行駛速度大于38 km/h,即若黃燈信號(hào)時(shí)長(zhǎng)為3 s,則只有少于31%的駕駛?cè)丝梢栽诓徽{(diào)整車(chē)輛行駛狀態(tài)的條件下避免陷入第一類(lèi)兩難區(qū)。當(dāng)黃燈信號(hào)時(shí)長(zhǎng)為4 s時(shí),位于左轉(zhuǎn)車(chē)道上的駕駛?cè)丝梢杂行П苊庀萑氲谝活?lèi)兩難區(qū)中。當(dāng)黃燈信號(hào)時(shí)長(zhǎng)為5 s時(shí),駕駛?cè)艘部梢杂行П苊庀萑氲谝活?lèi)兩難區(qū)的風(fēng)險(xiǎn),但考慮到左轉(zhuǎn)轉(zhuǎn)用相位黃燈信號(hào)時(shí)長(zhǎng)為4 s時(shí)已經(jīng)可以保證駕駛?cè)瞬幌萑氲谝活?lèi)兩難區(qū),繼續(xù)延長(zhǎng)黃燈信號(hào)時(shí)長(zhǎng)可能增加駕駛?cè)司o張和焦慮情緒,增大交叉口停車(chē)延誤[9],因此不建議將左轉(zhuǎn)專(zhuān)用相位黃燈信號(hào)時(shí)長(zhǎng)設(shè)置為5 s。故對(duì)于限速值為60 km/h交叉口,左轉(zhuǎn)專(zhuān)用相位黃燈信號(hào)時(shí)長(zhǎng)宜設(shè)置為4 s。
綜上所述,在考慮第一類(lèi)兩難區(qū)的條件下,限速值為60 km/h信號(hào)交叉口直行相位黃燈信號(hào)時(shí)長(zhǎng)優(yōu)化取值為5 s,左轉(zhuǎn)專(zhuān)用相位黃燈信號(hào)時(shí)長(zhǎng)優(yōu)化取值為4 s。
4 結(jié) 語(yǔ)
在采集實(shí)測(cè)數(shù)據(jù)的基礎(chǔ)上,構(gòu)建了直行相位和左轉(zhuǎn)專(zhuān)用相位的第一類(lèi)兩難區(qū)模型。通過(guò)模型仿真表明:第一類(lèi)兩難區(qū)的速度分布區(qū)間隨著黃燈信號(hào)時(shí)長(zhǎng)的增加而變小,即延長(zhǎng)黃燈信號(hào)時(shí)長(zhǎng)可以有效消除第一類(lèi)兩難區(qū);當(dāng)黃燈信號(hào)時(shí)長(zhǎng)一定時(shí),駕駛?cè)讼萑氲谝活?lèi)兩難區(qū)的風(fēng)險(xiǎn)隨著速度的增加先增大后減小。對(duì)于限速值為60 km/h的信號(hào)交叉口,黃燈信號(hào)時(shí)長(zhǎng)設(shè)置為3 s時(shí),駕駛?cè)讼萑氲谝活?lèi)黃燈困境的風(fēng)險(xiǎn)較高,在直行相位黃燈信號(hào)時(shí)長(zhǎng)為5 s和左轉(zhuǎn)專(zhuān)用相位黃燈信號(hào)時(shí)長(zhǎng)為4 s的情形下,可以有效避免駕駛?cè)讼萑氲谝活?lèi)黃燈困境。
受數(shù)據(jù)采集的限制,筆者僅對(duì)限速值為60 km/h的信號(hào)交叉口黃燈時(shí)長(zhǎng)優(yōu)化問(wèn)題進(jìn)行研究,模型的實(shí)用性需要更多的實(shí)測(cè)數(shù)據(jù)進(jìn)行驗(yàn)證,如針對(duì)限速值為50 km/h和70 km/h的交叉口開(kāi)展實(shí)證研究。同時(shí),信號(hào)燈倒計(jì)時(shí)、過(guò)街行人、交叉口的交通狀態(tài)等因素都可能影響駕駛?cè)说臎Q策行為,從而導(dǎo)致車(chē)輛行駛參數(shù)發(fā)生變化,后續(xù)需要擴(kuò)大樣本,對(duì)相關(guān)因素進(jìn)行深入研究,以完善模型參數(shù)。
猜你喜歡
童話(huà)王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
