航天飛行安全體系通訊導航頻率干擾監測系統設計
2018-07-27 05:15:06
計算機測量與控制 2018年7期
(南京理工大學,南京 210094)
0 引言
航空飛行具有高風險、高技術的特點,雖在航空飛行安全體系方面已有很大進步,但航空飛行事故仍不斷發生[1]。經調查發現,航天飛行事故發生的主要原因之一是通訊導航頻率的干擾[2]。通訊導航頻率干擾監測系統為航天飛行的起飛、空中飛行和著陸提供穩定連續可靠的監視、導航和通訊服務。一旦出現故障,會對飛行安全和管制指揮帶來風險,造成巨大的損失和后果[3]。為了保障航天飛行的安全,需要對通訊導航監測系統進行深入研究。傳統監測系統采用CC2530芯片作為匯聚節點,服務器對采集數據進行分析,完成監測,該系統監測過程繁瑣,監測效率和精準度較低[4]。為解決上述問題,提出航天飛行安全體系通訊導航頻率干擾監測系統設計。實驗證明,該系統監測效率高、精準度高。
1 系統整體構架設計
對航天飛行安全體系通訊導航頻率干擾監測系統進行研究,需先對系統整體架構進行設計。航天飛行安全體系通訊導航頻率干擾監測系統的整體構架如圖1所示。
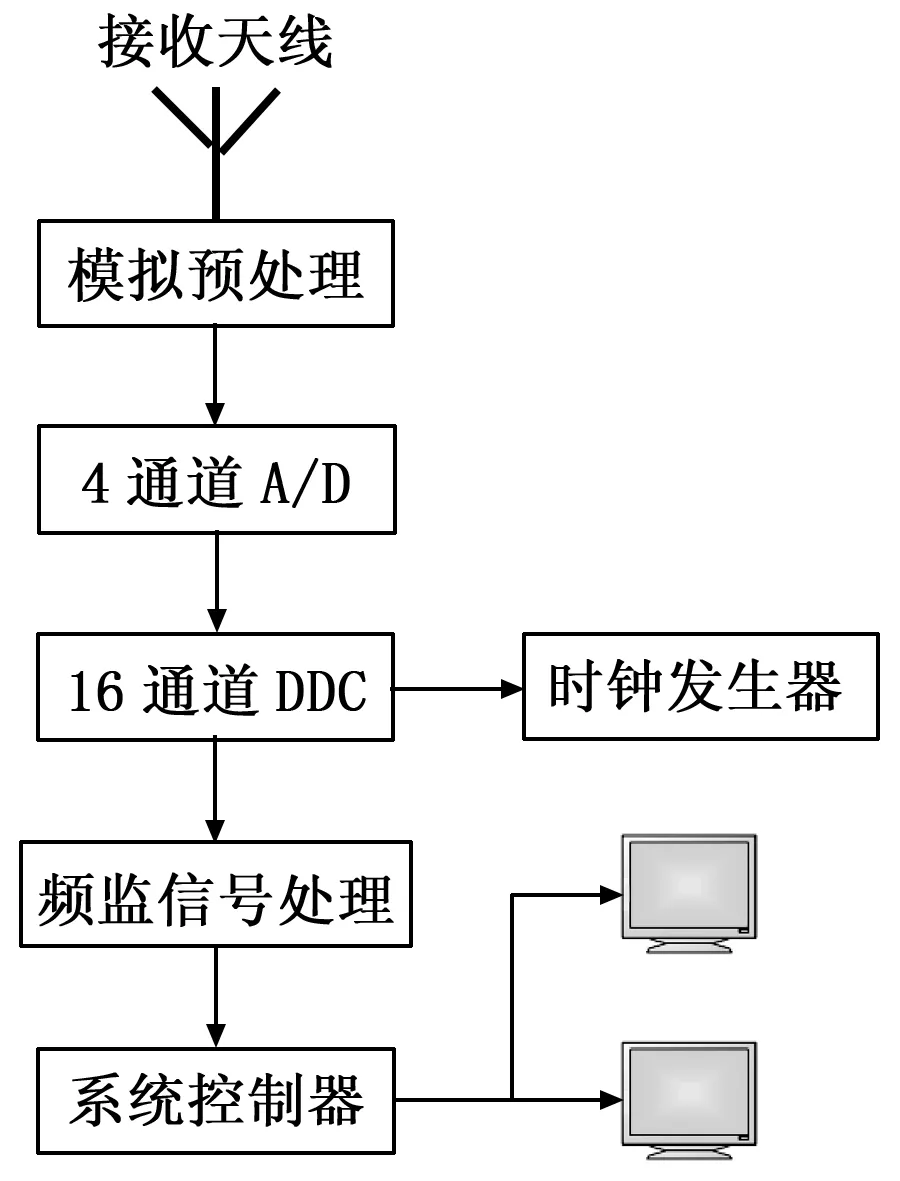
圖1 頻率干擾監測系統的整體構架圖
由圖1可知,航天飛行安全體系通訊導航頻率干擾監測信道采用獨立的數字化接收機(DDC)、A/D和信號處理,其中探測信道與航天飛行安全體系通信導航頻率干擾監測系統的其余部分完全共享。因為頻率干擾監測系統的工作方式為被動的,所以頻率干擾監測信道不需要發射機。航天飛行安全體系通訊導航頻率干擾監測系統A/D的接收天線最多可達到4路。數據化接收機最多可達到16個,對全頻段進行監視時系統不需要掃描的方法。
以系統整體架構為設計依據,對航天飛行安全體系通訊導航頻率干擾監測系統進行設計,使所設計的監測系統具有合理性和可行性。
2 硬件設計
航天飛行安全體系通訊導航頻率干擾監測系統硬件部分主要由數字接收機和監測信道等設備組成。其中數字接收機和監測信道是組成頻率干擾監測系統硬件的最重要組成部分,要優化系統硬件設備,則需對數字接收機重新配置,并對監測信道進行改進。具體改進過程描述如下。
2.1 數字接收機配置
航天飛行安全體系通訊導航頻率干擾監測系統中的數字接收機的配置如圖2所示。由圖2可知,數字接收機收集數據采用的是4通道的A/D,將收集到的數據輸入到獨立的ICS-554B中,再通過航天飛行安全體系通訊導航頻率干擾監測系統的總線將數據分配到含有4個數字接收通道的GC4016中,GC4016共存在16個數據接收通道,完成全頻段的監測。
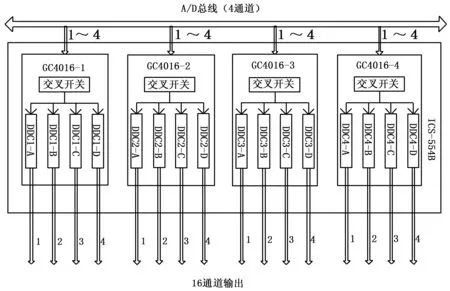
圖2 數字接收機的配置圖
在航天飛行安全體系通訊導航頻率干擾監測系統的數字接收機中3 MHz為最大零中頻信號帶寬。在航天飛行安全體系通訊導航頻率干擾監測系統的實際應用中,將全頻段的帶寬均勻的分到16個數字接收機中,每個數字接收機平分到的處理信號帶寬之間相互獨立,為750 kHz,在航天飛行安全體系通訊導航頻率干擾監測系統中多設置數字接收機可以簡化系統的復雜度,減少數據信息的冗余度。
航天飛行安全體系通訊導航頻率干擾監測系統中頻監信道和探測信道共用一個手動開關和預選濾波器。即在航天飛行安全體系通訊導航頻率干擾監測系統中探測信道和頻監信道的工作方式是兼容的,在通訊導航頻率干擾監測系統間歇發射信號的期間,同步采集航天飛行的環境信號。航天飛行安全體系通訊導航頻率干擾監測系統處理器的主要功能是對時域數據信息進行頻譜分析,獲得航天飛行的全頻段功率[5]。
2.2 監測信道改進
2.2.1 頻率干擾監測信道工作時序
頻率干擾監測信道和探測信道的工作周期是同步的,在頻率干擾監測信道和探測信道的工作周期結束前,向航天飛行安全體系通訊導航頻率干擾監測系統提交當前周期的監測結果,為系統下一個周期的使用提供數據信息基礎。在航天飛行安全體系通訊導航頻率干擾監測系統中,數字化接收機的控制方式具有靈活和多通道的特點,可全頻段同時覆蓋的對航天飛行的環境進行監測。頻率干擾監測信道的時序分為評估階段和選頻階段兩部分。
選頻階段將航天飛行安全體系通訊導航頻率干擾監測系統的接收通道變為寬帶模式,對全頻段的航天飛行環境中的時域信號進行實時接收,首先對被動接收的航天飛行時域信號頻譜進行分析,然后在航天飛行安全體系通訊導航頻率干擾監測系統中挑選幾個小頻段。
在評估階段中,將航天飛行安全體系通訊導航頻率干擾監測系統中的接收通道變為窄帶模式,與探測信道的工作方式一致,將通訊導航頻率干擾監測系統接收通道中的中心頻率傳送到選頻近端的中心點,對選出的中心點進行速度和距離的處理,得到的頻譜結構與探測通道一致,寂靜頻率的確定通過評估信道的頻譜完成,圖3為監測信道的工作時序。
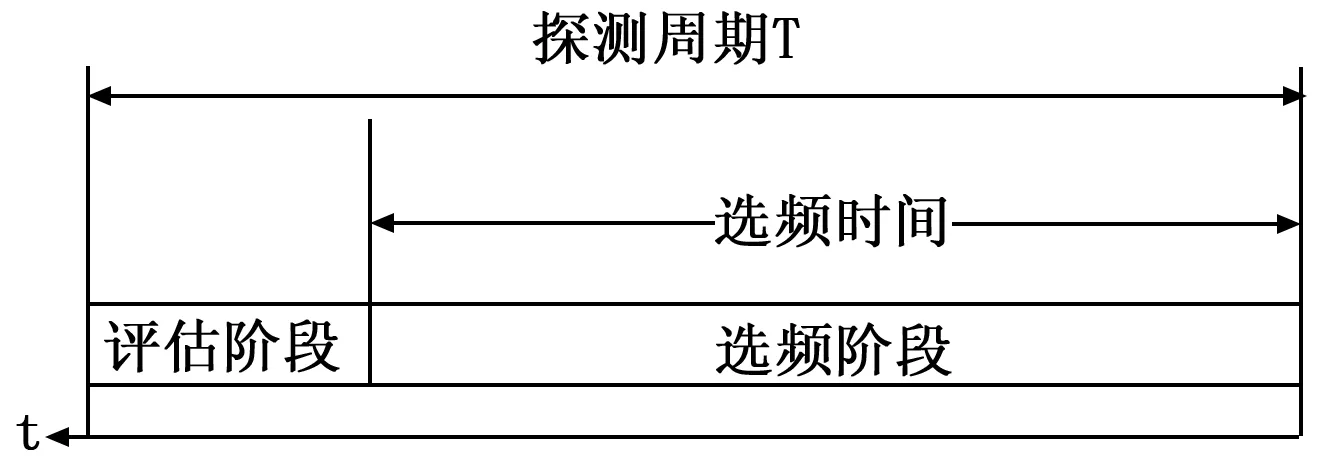
圖3 監測通信的工作時序
2.2.2 頻率干擾監測信道信號處理
航天飛行安全體系通訊導航頻率干擾監測信道信號處理的主要任務是實時處理接收的航天飛行外部環境信號,并進行分析,得到適用于監測工作的寂靜頻率。
通過對監測信道工作時序的研究和分析,對頻率干擾監測信號處理時,先進行信號的選頻工作,將航天飛行安全體系通訊導航頻率干擾監測系統接收到的時域信號變為頻域信號,通過分析轉換得到的頻域信號挑選8~16個作為評估階段輸入參數的寂靜頻段。為了對航天飛行模擬前端的增益控制量進行控制需要判斷和分析接收到的時域信號幅度。
在評估階段,以預選頻率為中心的窄帶模式下航天飛行安全體系通訊導航頻率干擾監測系統采用探測信道的處理方式對信號進行處理,得到的速度二維普的距離為8~16個頻段[6]。通過對二維普進行判斷和分析,為航天飛行安全體系通訊導航頻率干擾監測系統提供1~4個最優結果。圖4為航天飛行安全體系通訊導航頻率干擾監測信道信號處理的流程圖。
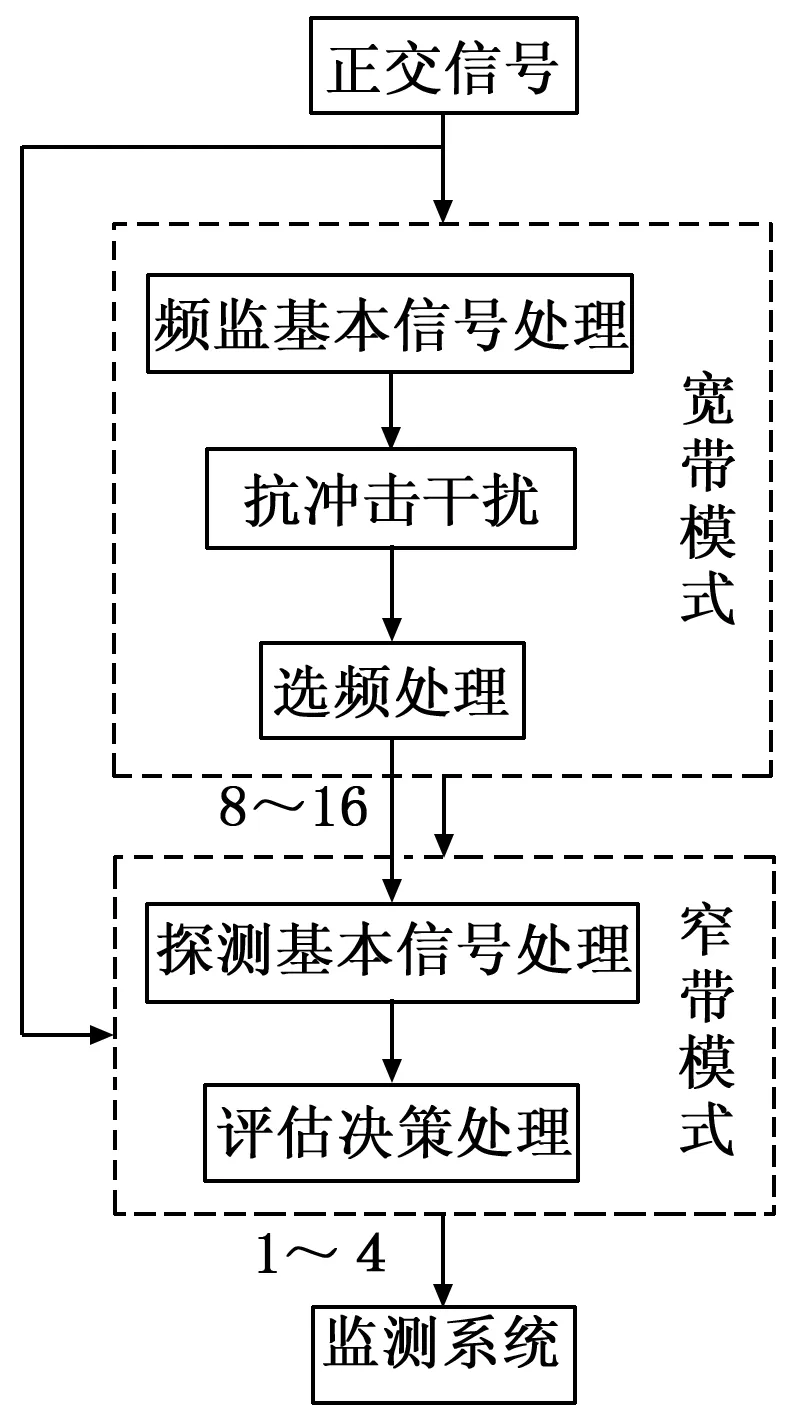
圖4 頻率干擾監測信道信號處理流程圖
綜上所述,重新配置數字接收機,并對監測信道的工作時序和信號處理過程進行改進,完成航天飛行安全體系通訊導航頻率干擾監測系統硬件部分的設計,為系統軟件設計提供最強健的硬件平臺。
3 軟件設計
航天飛行安全體系通訊導航頻率干擾監測系統軟件主要是頻率干擾監測功能的開發。頻率干擾分為同頻干擾、鄰頻干擾和互掉干擾。此外還包括人為噪聲和自然噪聲的外部噪聲。前三種干擾幾乎占據了頻率干擾的99%。因此所設計的系統對這三種干擾的監測進行優化開發,以提高系統的監測效率和精度。具體優化過程如下。
3.1 同頻干擾監測
同頻干擾是指與航天飛行中有用信號頻率相同的干擾信號,導致干擾信號和有用信號一同落到航天飛行安全體系通訊導航頻率干擾監測系統的接收機通道內,通過變頻、放大后傳送到中頻的通帶內。因為同頻干擾信號和有用信號的頻率非常接近,導致航天飛行安全體系通訊導航頻率干擾監測系統的接收機輸入端存在同頻干擾信號,阻塞航天飛行體系的接收機,造成接收機的靈敏度下降或通訊導航中斷等后果。
定義f0±Br/2為同頻干擾的頻率范圍,式中f0代表的載波頻率為有用信號的,Br所代表的是航天飛行安全體系中接收機的中頻帶寬。用同頻載干比衡量同頻干擾的大小。設C/I代表的是同頻干擾信號功率I和有用載頻功率C的比值。因為航天飛行安全體系的要求較高,因此要求航天飛行安全體系通訊導航頻率干擾監測系統中的航天飛行體系控制業務信道和主控制信道的頻率為C/I≥12 dB,非安全類數據或電路信道和語音信道的頻率為C/I≥9 dB。
設航天飛行安全體系通訊導航頻率干擾監測系統中同頻干擾小區的數量用n表示,在只考慮航天飛行安全體系損耗時,通過導航頻率干擾監測系統的下行鏈路接收的載干比本地均值可用公式(1)表示。
(1)
其中:C代表的是移動臺接收的航天飛行安全體系通訊導航頻率干擾監測系統中基站的信號功率,Ii所代表的是第i個同頻基站的移動臺接收到的信號功率。
采用自由空間電波傳輸模型對本地接收功率的均值進行表示:
(2)
其中:Pr代表的是監測系統接收的功率,P0代表的功率為基站d0的參考點,r代表的是監測系統路徑的衰減指數。設監測系統中的每個同頻基站中的路徑衰減指數和發射功率相同,則航天飛行安全體系通訊導航頻率干擾比的本地均值可用公式(3)表示。
(3)
其中:d代表的是移動臺距航天飛行安全體系通訊導航頻率干擾監測系統基站的距離,di代表的移動臺到航天飛行安全體系通訊導航頻率干擾監測系統中第i個同頻基站的距離。
3.2 臨頻干擾監測
臨頻干擾是因為使用相鄰的頻率造成的信號干擾[7]。根據有用信號和干擾信號頻率的間隔,若f1代表的是干擾信號的頻率,f0代表的是有用信號的頻率,當f1和f0滿足f1=f0±n×Δf時,為n階的臨頻干擾信號。式中,n代表的是正整數,Δf代表的是最小頻率的間隔。
二階臨頻干擾載干比C/Ia2和一階鄰頻干擾載干比C/Ia1代表的是信號載頻功率C與二階臨頻干擾信號Ia2和一階臨頻干擾信號Ia1的比。
再用自由空間電波傳輸模型對本地均值進行估計,用公式(4)表示。
(4)
其中:r所代表的是路徑的衰減指數,di′代表的是移動臺到監測系統一階臨頻基站的距離。
(5)
其中:di″'代表的是移動臺到監測系統基站的距離。
3.3 互調干擾監測
互調干擾是由航天飛行體系的傳輸信道電路中產生的,因為航天飛行安全體系通訊導航頻率干擾監測系統的非線性變換中會產生一些組合頻率信號,導致其中一部分組合頻率信號傳輸到監測系統飛行安全體系的接收機通道內,干擾航天飛行體系中的有用信號[8]。
電路的非線性特性是產生互調干擾的主要原因,干擾信號產生互調干擾必須要滿足強度和頻率關系兩個條件。所以可以從這兩個方面對互調干擾信號進行破壞,從而實現對互調干擾的監測。
根據以上步驟,依據系統整體架構分析,對數字接收機、監測信道等系統硬件進行改進,依據不同頻率干擾類型,分別對不同頻率干擾監測功能進行優化,完成航天飛行安全體系通訊導航頻率干擾監測系統的設計。
4 實驗結果與分析
為了驗證航天飛行安全體系通訊導航頻率干擾監測系統的性能,需進行監測實驗。本次實驗的監測操作系統為Windows2015,雷電信號是一種時域沖擊干擾源,具有突發性和持續時間短的特點,是航天飛行安全體系中的奇異信號,局部特征較為明顯,可以提高航天飛行安全體系中的噪聲基底。
監測效率的快慢是檢驗所設計的航天飛行安全體系通訊導航頻率干擾監測系統性能優劣的重要指標,分別采用傳統系統和改進系統對頻率干擾進行監測,測得兩種不同系統的監測信號幅值對比結果如圖5所示。
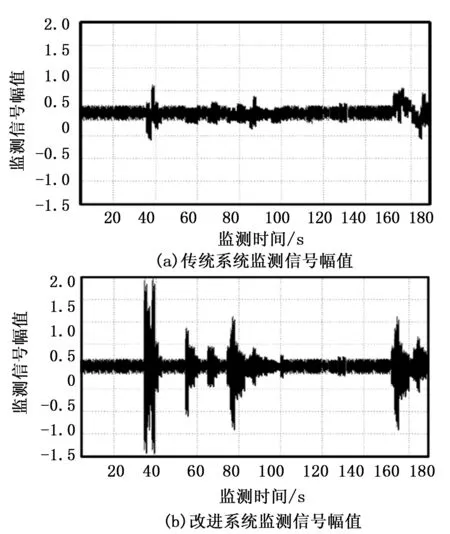
圖5 兩種不同系統監測信號對比結果
分析圖5可知,圖5(a)為傳統監測系統監測信號幅值結果。圖5(b)為改進系統監測信號幅值結果。每隔4s對雷電干擾源進行一次全頻段的監測,可在一個周期中得到雷電干擾源的全頻段數據,分析圖5(a)和圖5(b)可知,傳統系統的監測信號幅值在-0.5~0.5上下浮動,且監測信號較少,監測信號強度較小,平均監測信號幅值在-0.2~0.2之間。改進系統的監測信號幅值在-2~2之間變化,監測信號緊密出現,且檢測信號強度較大,平均監測信號幅值在-1~1之間。對比傳統系統和改進系統的實驗結果可得,改進系統的監測信號幅值和監測信號強度均遠遠大于傳統系統監測信號幅值和監測信號強度,且改進系統的監測信號出現頻率也遠高于傳統系統的監測信號出現頻率。充分說明改進系統的監測效率更高,驗證了改進系統的有效性。
為了測試航天飛行安全體系通訊導航頻率干擾監測系統的監測精度,分別采用傳統系統和改進系統對頻率干擾信號進行測試,測得兩種不同系統頻率干擾信號結果如圖6所示。
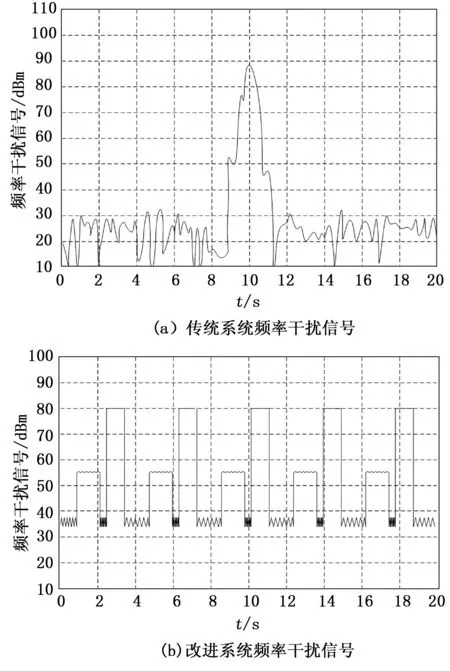
圖6 兩種不同系統頻率干擾信號對比結果
分析圖6可知,圖6(a)為傳統系統頻率干擾信號,圖6(b)為改進系統頻率干擾信號。對比圖6(a)、圖6(b)可知,采用傳統系統對頻率干擾進行監測,其頻率干擾信號以曲線形式作出大致記錄,無法精確記錄其頻率干擾信號的出現時間,且其頻率干擾信號整體較弱,信號平均值約為25 dBm,在9~11 s階段,出現最大頻率干擾信號為90 dBm。采用改進系統對頻率干擾進行監測,其頻率干擾信號以矩形線形式記錄,能夠十分精確地記錄出頻率干擾信號的出現時間,其頻率干擾信號整體較強,信號平均值約為60 dBm,且以每2 s交替一次的規律穩定變化,交替信號值分別為55 dBm和60 dBm。對比傳統系統和改進系統的實驗結果,改進系統的頻率干擾信號遠遠大于傳統系統的頻率干擾信號,且穩定性更高,充分說明改進系統的監測精度更高,驗證了改進系統的實用性。
通過參數d對航天飛行安全體系通訊導航頻率干擾監測系統的監測耗時進行測試,d代表的是移動臺距系統基站的距離,當d的取值在2~3區間時,航天飛行安全體系通訊導航頻率干擾監測系統的監測效率最高,采用改進系統和傳統系統進行監測耗時測試,表1為兩種不同系統監測耗時的對比結果。
分析表1可知,傳統系統的監測耗時平均值為2.2 s,最大耗時為3 s,且出現了兩次。改進系統的監測耗時平均值為1.2 s,最大耗時為2 s,且只出現了一次。對比傳統系統和改進系統的檢測耗時結果可知,改進系統的監測耗時僅是傳統系統監測耗時的一半,說明改進系統的監測耗時更少,監測效率更高。

表1 兩種不同系統監測耗時的對比結果
綜合以上實驗結果可得,改進設計的航天飛行安全體系通訊導航頻率干擾監測系統監測效率高,監測精度高,且監測耗時少。
5 結論
對航天飛行安全體系通訊導航中的頻率干擾進行監測,是保障航天飛行安全的重要措施,傳統方法存在監測精準度低和監測效率低的問題,因此提出航天飛行安全體系通訊導航頻率干擾監測系統設計。通過改進數字接收機和監測信道,依據不同類型干擾優化監測功能,完成頻率干擾監測系統設計。實驗證明,改進系統具有監測精度高,效率高,耗時少的特點。但在運行穩定性方面尚未進行測試,未來將針對穩定性進行深入研究,是系統設計充分滿足頻率干擾監測技術需求,為航天飛行的安全保駕護航。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
新世紀智能(數學備考)(2020年11期)2021-01-04 00:38:16
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
新高考·高一物理(2014年1期)2014-09-18 01:26:07
