基于V2X技術的FCWS測試方法研究
2018-07-26 13:11:02張迪思祖暉陳新海王博思
汽車實用技術 2018年13期
關鍵詞:系統
張迪思,祖暉,陳新海,王博思
(重慶車輛檢測研究院有限公司,四川 重慶 400000)
前言
當前,車輛的環境感知技術分為兩個方向,一是通過自主感知,即自身的傳感器探測周圍環境類似于“人的眼睛”。二是通過專用短程通訊,也就是 V2X車路協同技術進行感知,通過“聽”和“講”的方式,發送和接收信息。兩種方式各有優劣,自主式感知通過攝像頭、微波雷達、激光雷達等傳感器對可見范圍內的物體有較強的識別能力,且不存在通信延時、丟包等問題,決策機構可迅速及時的獲取數據;V2X方式則有較強的車路通訊能力,可通過路側設備 RSU實時獲取紅綠燈相位、道路擁堵情況等信息;憑借其500米左右的信號覆蓋范圍,可提前獲知非視距范圍內的道路信息,為車輛的決策提供更豐富的環境數據,可充分彌補自主式感知的劣勢。然而,由于當前V2X設備裝機量的不足,以及道路設施尚未大量鋪開,目前自動駕駛技術行業的主要關注點依然在自主感知技術的運用上,《營運客車安全技術條件JT/T 2016-1094》、《GB/T 26773 智能運輸系統 車道偏離報警系統 性能要求與檢測方法》、《JT/T 883 營運車輛行駛危險預警系統技術要求和試驗方法》、歐盟《ECE R131》等國內外法規均對FCW、AEBS、LDWS等測試方法進行詳細的描述[1],但其測試范圍主要基于視距的基礎上。本文將參考基于自主式感知技術的FCWS測試方法,實現基于V2X技術的FCW測試方法并對兩種方式的測試結果進行對比。
1 基于自主傳感器的FCWS實現方式
FCWS,即Forward Collision Warning System,前碰撞預警系統,該系統可以在碰撞發生前發出緊急的碰撞警告,幫助駕駛員提前做出制動措施,可以有效降低追尾事故發生概率或減輕碰撞激烈程度[2]。當前,FCWS主要通過攝像頭和微波雷達作為感知層獲知周邊信息,然后數據會被提交給決策系統;決策系統將對數據進行一系列的處理,包括過濾無用信息、判斷所處車道、判斷障礙物的位置和姿態、判斷障礙物的威脅等級,最后通過HMI聲光報警或者觸感的方式警告駕駛員。尤其在駕駛員過度疲勞、注意力不集中等情況下,FCWS可以極大的減少事故的發生幾率。
2 基于自主傳感的FCWS測試方法
目前FCWS主要采用預警事件TTC試驗方法,即通過Time To Collision碰撞時間判斷FCWS系統是否在合理的時間范圍內給予了警告信息[2]。以《營運車輛行駛危險預警系統技術要求和試驗方法》(JT/T 883-2014)為例,試驗工況分為前車靜止CCRs、前車運動CCRm、和前車剎車CCRb三種,如下表所示。
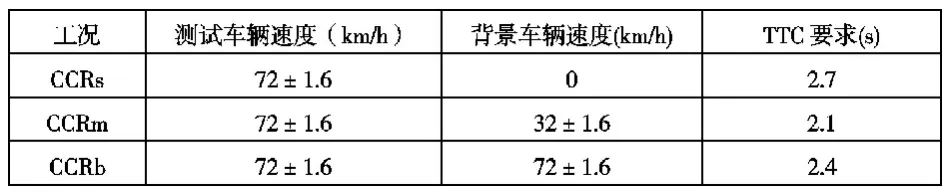
表1 三種試驗工況
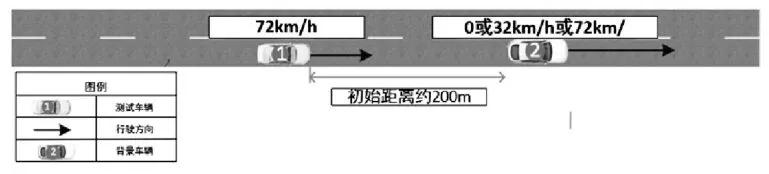
圖1 JT/T 883-2014標準的FCWS典型測試場景
按照標準要求,每一個試驗工況測試七次,滿足TTC報警要求則視為一次成功,如七次測試中有五次成功且沒有兩次連續失敗的情況出現,則視為通過該組工況測試。典型的測試場景如圖1所示。
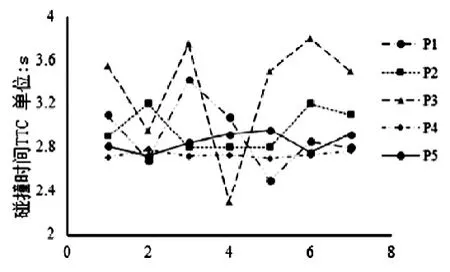
圖2 一組產品的CCRm測試結果
根據資料顯示,自主式FCWS系統,尤其是基于攝像頭的產品,普遍存在TTC報警時間不穩定,標準差過大等問題。圖2展示的是一組產品的CCRs測試結果,其中P1、P2、P3為國產基于攝像頭的產品,P4和P5為基于毫米波雷達的產品。
3 基于V2X的FCWS所依賴的技術
3.1 V2X技術
V2X是一種實現車與車、車與路、車與人之間通訊的無線通信技術,最顯著的特點是可以實現去中心化的 AdHoc自組網通信,且具有延時低、覆蓋范圍廣等特點,非常適合運用在車路協同領域。目前V2X技術分為兩個陣營,分別是美國主導的DSRC技術,以及中國大唐、華為主導的LTE-V技術。相對于自主式FCWS采用的攝像頭和微波雷達,V2X方式在感知范圍上具有較大的優勢,且不受障礙物影響。

表2 幾種技術的感知范圍對比
3.2 高精定位技術
全球主流的衛星定位服務主要由美國GPS、俄羅斯的格洛納斯、以及中國的北斗提供,通過實時差分技術RTK,其定位精度可以達到更高級別。高精定位又分為地基和星基,目前最常用的是星基,國內的廠商,如千尋,已經開始提供定位服務,其精度可以達到分米級。如果通過專用設備搭建RTK基站,則其精度可以高達厘米級。
V2X技術解決了信息傳輸的問題,而高精定位技術則解決了車輛位置的問題,車與車之間變可以通過相互告知自己的位置、速度、姿態等信息,計算出兩車之間碰撞的可能性以及碰撞的風險等級。
4 使用V2X技術實現FCWS測試的方法
4.1 基于V2X的FCWS測試設備
4.1.1 V2X車路協同車載終端
V2X車載終端包含通信模塊、控制器、HMI(用戶界面,如平板等)和電池。其中,通信模塊負責車與車之間的通信;控制器負責判斷和處理數據;最后由HMI以聲光的方式告知駕駛員。目前,國內研發V2X車載終端的廠商主要有星云互聯、金溢、萬集等,且聯合編著的聯盟標準《合作式ITS車用通信系統應用層及應用數據交互標準》已準備上升至國標,為各廠商之間實現互聯互通提供了基礎支撐。各廠商開發的應用已經覆蓋前向碰撞預警、交叉路口預警、超速預警、紅綠燈監測等多項應用,并且部分廠商還提供開放接口,供用戶進行二次開發并允許對參數進行修正,為試驗中更精確的調試匹配掃清了技術障礙。

圖3 某V2X車載終端
4.1.2 高精定位差分基站
常規的定位服務只能提供亞米級的定位精度,而 FCWS系統對定位的精度要求相對較高,需要車道級的定位,否則就會導致報警提前或延后,甚至將對面車道正常行駛的車輛誤認為是本車道車輛,造成頻繁的誤報,影響用戶體驗。因此,需要在測試中架設差分基站,以獲取車輛最準確的位置信息。測試中,架設的差分數據分發結構如圖4所示:地面差分基站獲取校正信息,將校正信息發送給中心服務器,然后服務器再將數據分發給路側基站進行廣播,或者直接通過蜂窩網絡傳遞給車載終端[3]。

圖4 典型的地基RTK基站數據分發結構
4.1.3 雙車協調系統
雙車協調系統用于獲取兩車的相對距離和相對速度,由此可以計算出試驗所需要的重要指標TTC。常見的雙車協調系統如OXts公司的RT-RANGE。

圖5 OXts公司的RT-RANG
4.2 基于V2X的FCWS測試場景
4.2.1 測試前的準備
測試車輛和背景車輛均需要安裝雙車協調系統和 V2X車載終端,并將天線放置在車頂處,以保證通信質量。另外,測試場地須提供高精定位服務。

圖6 V2X設備裝車狀態
4.3 基于V2X的FCWS測試流程和方法
4.3.1 直道測試
本測試由于有一定的危險程度,并且對通信的環境要求較高,應該選擇有測試資質的試驗場,并且最好在性能路等平直路段進行,為了保證試驗的安全性和測試效果,測試路段的長度應大于2公里,并有緩沖區域。

圖7 雙車同道測試
測試工況如下表所示:
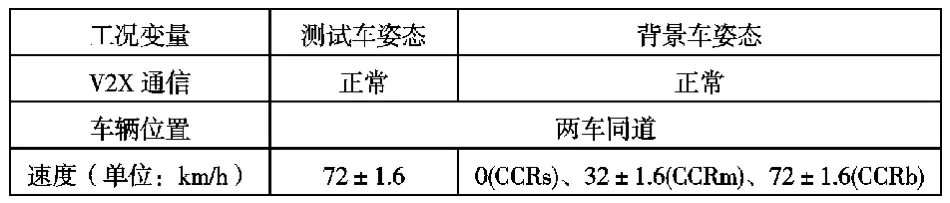
表3 雙車同道測試工況表
測試流程如下:
(1)確保試驗車與背景車V2X系統通信正常;確保高精定位數據正常。
(2)試驗車沿道路中心線以72km/h速度行駛,背景車按照各工況所需速度行駛;
(3)背景車執行工況所需操作。
(4)記錄測試車 FCWS系統報警時間,并記錄雙車協調系統所顯示的TTC;
(5)當TTC小于2s時,試驗車采取制動或轉向避免發生碰撞;
(6)試驗結束。
4.3.2 彎道測試
如前文所述,V2X相當于動物的耳朵,其最大的優勢就是可以提前監測到非視距的物體,在彎道、起伏路等路段相對于自主式感知系統在理論上具備一定的優勢。
除測試場地與直道測試不同之外,測試工況與表3相同,測試流程也與直道測試相同,測試時兩車的初始距離可以適當的增大,使背景車輛不在測試車輛的可視范圍內,從而達到測試NLOS場景的目的。根據LTE-V頻率驗證項目的測試報告,兩車在彎道中相距150米的情況下,丟包率依然能保持在10%以下且延時小于100ms,可以充分保障FCWS在彎道中的性能。
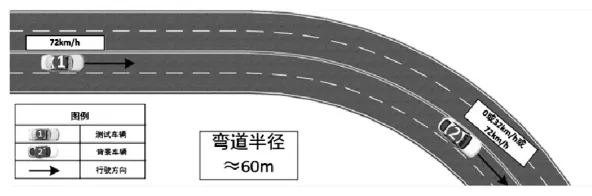
圖8
4.3.3 虛警測試
虛警測試主要檢測測試車輛的FCWS對目標物體的篩選過濾能力和誤判率,是否能夠過濾無威脅的物體(如對面正常行駛的車輛)。如果FCWS的誤判率過高[4],頻繁的對駕駛員發出錯誤的警告,不僅會造成駕駛員對報警的厭惡,還有可能使駕駛員對報警聲產生倦怠,即使出現真正的險情,也無法做出及時的應對措施。如果這樣的 FCWS后期演進到AEBS系統,直接對車輛的控制器執行錯誤的操作,后果就更不堪設想了。
虛警測試的測試示意圖如下,測試車輛和背景車輛在不同車道中行駛,觀察各種工況下測試車輛FCWS的響應情況。

圖9 虛警測試
其測試工況如表4所示:

表4 虛警測試工況
虛警測試的流程如下:
測試流程如下:
(1)確保試驗車與背景車V2X系統通信正常;確保高精定位數據正常。
(2)試驗車沿道路中心線以72km/h速度行駛,背景車按照各工況所需速度行駛;
(3)背景車執行工況所需操作。
(4)觀測FCWS是否進行報警,如是,則測試失敗。
(5) 試驗結束。
5 測試結果
我們對基于V2X技術的FCWS產品進行了4種工況共計28組測試,并與其他兩種產品的測試結果進行了對比,其結果表明,采用V2X方案的FCWS在性能和穩定性上已達到采用毫米波雷達方案的FCWS產品的水平,大大好于采用攝像頭方案的產品。由于自主式FCWS產品沒有進行彎道工況測試,因此沒有數據可以進行對比。但是從技術實現的原理來看,V2X最大的優勢應當就是此類非視距場景下的預警。
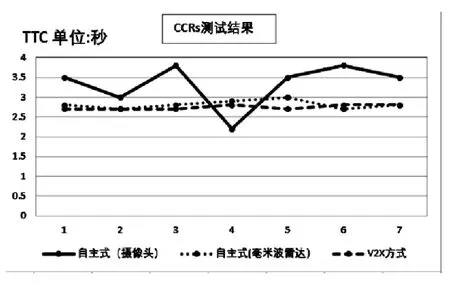
圖10 CCRs測試結果對比
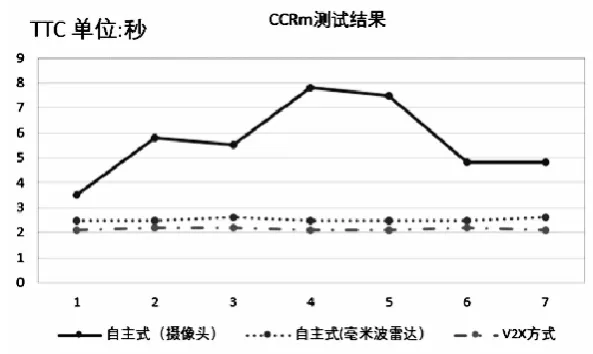
圖11 CCRm測試結果對比

圖12 CCRb測試結果對比
6 結語
(1)與自主式傳感方式相比,V2X受天氣等環境的影響較小[5],決定性能和穩定性的關鍵就是通信的覆蓋率、延時、丟包率,以及相對位置和相對距離的算法。
(2)高精定位技術是V2X技術的左臂右膀,如果定位不夠精確,無法反映車輛的實際位置,那么其性能肯定大打折扣。
(3)V2X需要足夠的裝配率才能有效果,但是V2X設備的普及還有很長的路要走,需要政府、企業、科研機構等各方的聯合推動。
(4)自主式感知和V2X方式均擁有各自的優點和缺點,而兩種傳感器并不是競爭關系,融合是今后發展的大趨勢。自主傳感器感知到的信息可以通過V2X方式廣播出去,將極大的擴大車輛的感知范圍。
相對于自主式FCW系統,V2X系統對感知的要求更為準確,為決策系統提供的數據更為精確可靠,因此在性能、可靠性的表現上更為優越。尤其是車輛環境復雜道路上,自主感知系統受到障礙物遮擋時,V2X的優越性有更大的體現。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
