采用CAN總線的雙電機同步控制雨刷系統控制器
2018-07-24 03:32:24閆達王旭東孫彥成
哈爾濱理工大學學報 2018年3期
閆達 王旭東 孫彥成


摘 要:目前汽車上普遍采用的單電機雨刷系統是通過機械連接實現的雨刷臂同步擺動,這種結構具有占用空間大和故障時維修不便等缺點,采用的雙電機雨刷系統克服了這些不足,同時還減小了系統的重量和機械噪音,但必須采用合理的方式解決雙電機的運行同步問題。針對這一問題,設計了采用CAN(controller area network)總線的雙電機同步控制雨刷系統控制器。搭建了控制器各部分的硬件電路,依據雨刷臂擺動過程中約束條件,建立了參考運行軌跡,并通過曲線擬合的方式將實驗采集到的雨刷臂的位置信息繪制成實際運行軌跡。通過主從同步控制方式,采用CAN總線作為兩側控制器信息傳遞的通訊總線,解決了雙電機的同步控制問題,并在實際車輛上進行了相關實驗,且已投入使用。實驗結果表明:采用CAN總線的雙電機雨刷系統控制器能夠實現雨刷臂同步穩定運行,并且能夠對其參考運行軌跡進行密切跟蹤。
關鍵詞:
雙電機雨刷系統;同步控制;軌跡建立;CAN總線
DOI:10.15938/j.jhust.2018.03.020
中圖分類號: TM33
文獻標志碼: A
文章編號: 1007-2683(2018)03-0117-05
Dual-motor Synchronous Wiper System Controller Based on CAN Bus
YAN Da, WANG Xu-dong, SUN Yan-cheng
(School of Electrical and Electronic Engineering, Harbin University of Science and Technology, Harbin 150080, China)
Abstract:Single-motor wiper system through a mechanical connection to swing synchronously is widely used. This structure has the disadvantages such as large space occupation, inconvenient maintenance and so on. Dual-motor wiper system overcomes all these problems and reduces the system weight and mechanical noise, but reasonable solution of synchronous operation should be adopted. To solve this problem, this design adopted dual-motor synchronous control wiper system based on CAN(Controller Area Network) bus. The circuit of the controller was built and the reference trajectories of wiper arms were established according to the constraints of the swing process while the actual trajectory was drawn through fitting the collected position information. Based on the CAN bus, the dual-motor synchronous control was realized through master-slave synchronous control method. The results of experiments show that: dual-motor wiper system controller based on CAN bus could achieve synchronous operation of the wiper arms tracking those reference trajectories.
Keywords:dual-motor wiper system; synchronous control; trajectory generation; CAN bus
0 引 言
雨刷系統作為汽車安全系統的重要組成部分之一,主要用于清除風擋玻璃上的雨雪、灰塵等雜物[1]。在目前車輛前端雨刷系統中,采用較多的形式為單電機驅動同向刮刷方式[2],左右雨刷器之間采用機械連接來實現雨刷臂的同向往復擺動。這種結構不僅體積、重量大[3],維修也極其不便。因此許多汽車廠商提出了用電子系統替代機械連接的采用對向刮刷方式的雙電機汽車雨刷系統[4]。在雙電機汽車雨刷系統中,每個雨刷臂由安裝在風擋玻璃兩側的兩個電機分別驅動,因此它比傳統的機械聯動方式增加了10%的刮刷面積[5],為汽車駕駛者提供了更好的視野,減小了視線的盲區,同時還具有體積小,重量輕,噪音低,拆卸方便等優點。
在雙電機汽車雨刷系統中,兩電機組件內各配備一個控制器。為了保證兩個雨刷臂安全運行不發生碰撞,兩控制器之間必須實現雨刷臂位置信息的實時傳遞,使其同步擺動,并始終保持一定的安全距離。因此如何實現位置信息快速可靠地傳遞并實現兩雨刷臂的同步擺動成為時下研究的熱點[6-9]。文[7]提出采用DSP(digital signal processing)作為主控制芯片實現多電機同步運行的一種方法,有效地提高了多電機系統同步運行的穩定性。文[8]提出了一種基于時鐘的同步控制方法,為兩個控制器設置不同的時鐘基準,從而改善了雙電機雨刷控制系統的響應速度和抗干擾性能。文[9]通過采用交叉耦合控制器,提高了雙電機同步控制系統的協調性和控制精度。以上文獻都沒有涉及兩控制器之間位置信息傳遞的方式,這對于兩雨刷臂的同步運行和系統故障時控制器的快速響應至關重要,為此本文提出了采用CAN(controller area network)總線的雙電機同步控制雨刷系統控制器的設計。采用在汽車電子系統應用廣泛的CAN總線作為通訊總線[10-12],目的是實現兩個控制器之間位置信息的快速傳遞,且方便控制器與汽車其他電子控制單元之間進行可靠的數據交換。為實現對雨刷臂位置的實時檢測,采用了零磨損的非接觸式角度位置檢測芯片。同時,為實現左右兩側雨刷臂的協調同步運行,采用了主從同步控制方式,選定司機側的雨刷電機作為主控制對象,乘客側的雨刷電機作為從控制對象。
1 采用CAN總線的雙電機同步控制雨刷系統控制器結構
采用CAN總線的雙電機同步控制雨刷系統控制器由司機側和乘客側兩個控制單元組成,其中司機側的控制單元為主控制單元,乘客側的控制單元為從控制單元。每個控制單元主要由5個模塊組成:微控制器模塊,驅動模塊,位置檢測模塊,電流檢測模塊,CAN總線通訊模塊。其中,微控制器模塊是整個雨刷控制器的核心。
本設計選用INFINEON公司的高性能、低功耗的單片機XC886作為主控制芯片。XC886是英飛凌XC88x系列增強型8位單片機[13],集成了4個16位定時器,6路PWM信號發生器,8通道10位AD轉換模塊等豐富的片上外設。在設計本控制器時,外部只需要為其配備位置檢測信號預處理電路,驅動電路及過流保護電路即可。
XC886內部還集成了兩個節點的MultiCAN模塊[14],剛好滿足控制器對于CAN節點的需求。一個用于控制器與汽車其他電子單元通訊,另一個用于主控制器將位置信息傳遞給從控制器。此外其內部集成的乘法/除法單元,能夠快速實現16位乘除運算,大大加快了計算并更新PWM控制信號占空比的速率,使得雨刷臂位置控制更加精確。
2 采用CAN總線的雙電機同步控制雨刷系統控制器各模塊的設計
2.1 驅動模塊設計
本設計主電路采用由4個功率MOSFET組成的H橋型拓撲結構,通過調節驅動MOSFET的PWM信號的占空比來實現電機的速度調節,其原理是通過改變電機電樞兩端平均電壓實現的調壓調速。由于需要驅動4個MOSFET,本設計選用可獨立驅動4個N溝道MOSFET的HIP4081A作為驅動芯片。該芯片最大工作頻率可達1MHz,并且內部集成了欠壓保護電路,同時可通過在HDEL、LDEL引腳外接電阻為PWM互補控制信號添加死區時間。DIS引腳為低電平有效的封鎖芯片輸出引腳。
驅動模塊設計如圖1所示。采用零歐姆電阻連接單片機引腳與驅動芯片,防止位于功率側的驅動芯片工作過程中的大電流反向流入單片機損壞芯片。DIS引腳與電流箝位保護電路連接,當流過電機電流過大時封鎖驅動芯片輸出。HDEL、LDEL引腳外接200k的電阻添加了90ns的死區時間,防止軟件添加的死區時間丟失。在H橋電路兩個下橋臂與地之間串聯了一個采樣電阻用于電流檢測。控制芯片輸出的兩對互補PWM控制信號分別接至BHI、BLI、AHI、ALI 4個引腳。由于采用雙極性PWM,4個功率開關管被分為兩組,V1和V4為一組,V2和V3為一組,同一組開關管的驅動波形相同,不同組驅動波形互補。當PWM占空比大于50%時,電機兩端平均電壓為正值,電機正轉。反之,當PWM占空比小于50%時,電機兩端平均電壓為負值,電機反轉。
2.2 雨刷臂位置檢測模塊設計
為實現兩側雨刷臂的協調同步運行,將雨刷臂實時的位置信息作為系統位置閉環反饋信號,用于與參考位置信息作差生成PID控制器的輸入信號。所以,快速且精確的位置信息采集對于系統穩定安全的運行至關重要。
本設計采用Melexis公司的MLX90316作為位置檢測芯片。MLX90316是基于三軸霍爾技術的角度式位置檢測芯片[15],作為一種非接觸式360°旋轉感測芯片,它可以感測平行于芯片表面的磁場強度變化。只要將磁鐵安裝在雨刷臂末端與位置檢測芯片平行正對的位置,MLX90316即可檢測雨刷臂當前位置相對于0°位置(可通過軟件任意設置)的角度。同時選用了芯片三種輸出方式中精度較高模擬輸出方式,將雨刷臂擺動角度范圍0°~80°與0~4.5V電壓線性對應。由于選用芯片的封裝為TSSOP16(雙片集成完全冗余設計),將集成的兩個完全相同的芯片分別配置成沿正反兩個方向測量雨刷臂相對0°位置的角度值,輸出的兩路電壓信號如圖2中OUT1和OUT2,經過A/D轉換所得的角度值取算數平均值后作為當前雨刷臂的位置。采用這一方式增加了位置測量信息的準確性,削弱了由于A/D轉換精度不夠帶來的誤差。
2.3 電流檢測模塊設計
雨刷臂在汽車風擋玻璃附著冰雪或因其他外界因素阻擋的情況下無法正常擺動,電機會出現堵轉現象,此時需要控制器及時做出響應使電機停轉。本設計通過檢測流過電機電樞的電流來判斷電機是否發生了堵轉現象。
H橋電路中采樣電阻兩端電壓輸入到電流檢測模塊經過兩級反向放大電路后的輸出,一方面經過濾波和鉗位電路后輸入到單片機的ADC模塊用以計算當前流過電機的電流。另一方面輸入到電壓比較器與電流閾值折算成電壓后的值做比較。由于不僅發生堵轉故障時需要電機停轉,雨刷臂正常運行也需要軟件控制電機在風擋玻璃兩側邊緣位置及時的停轉,所以本文設計了電流箝位保護電路如圖3所示。令電壓比較器輸出與單片機引腳P2.7經過一個或非門后連接到驅動芯片的DIS(低電平有效)引腳。電機正常運行時,電壓比較器輸出為低電平;電機發生堵轉時,流過電機電流大于閾值,電壓比較器輸出高電平。電機發生堵轉現象時,控制器既可以通過電壓比較器啟動硬件保護動作封鎖驅動芯片輸出,又可以通過軟件置位P2.7引腳禁止驅動芯片輸出,使電機停轉。停轉后電機立即反轉,使雨刷臂返回初始位置,并進行連續三次嘗試,若仍無法通過該位置,則雨刷臂返回初始位置后系統停止運行,控制器確認當前系統處于故障狀態,并產生故障警報。
2.4 微控制器模塊設計——主從同步控制設計
為實現兩雨刷臂同步運行,本設計采用了主從同步控制策略,系統工作原理如圖4所示。角度式位置傳感器將當前雨刷臂的位置作為反饋信號給控制芯片。主控制器將雨刷臂當前時刻位置與參考運行軌跡中該時刻的位置作差,結果送入PID控制器1。司機側雨刷臂的位置通過CAN總線傳遞給從控制器作為輸入,從控制器查表得到該時刻的參考位置,同理與當前時刻雨刷臂位置作差,將結果輸入到PID控制器2。PID控制器輸出更新了占空比PWM控制信號,并將PWM信號輸入到驅動模塊,驅動兩側雨刷電機帶動各自雨刷臂始終跟蹤各自參考運行軌跡協調同步擺動。
2.5 CAN總線通訊模塊
本設計采用INFINEON公司的TLE6250作為CAN收發芯片。通過將INH引腳下拉,RM引腳上拉選擇芯片始終工作在收發模式,如圖5所示。在單片機的CANTXD引腳與TLE6250的RXD引腳之間加入兩級反相器,以提高信號的穩定性和抗干擾能力。同時,在CAN總線兩端增加終端電阻,吸收信號的反射和回波。
3 仿真和實驗結果分析
3.1 CAN總線上位置信息的傳遞
圖6所示為雨刷臂擺動過程中CAN總線上主控制器向從控制器發送的一幀報文的解碼結果,由于是對CANL線上的數據進行的解碼,所以解碼結果為矩形波所對應數碼的反碼。可以看出該時刻CAN總線傳遞的數據為Byte:11,則司機側雨刷臂位置芯片輸出經AD轉換后結果為0x11=17,根據AD轉換精度為8位,對應最大擺動角度80°,從控制器由17/255×80=5.33可知,司機側雨刷臂當前位于角度5.33°處。這樣,通過CAN總線主控制器就完成了一次向從控制器位置信息的傳遞。
3.2 兩側雨刷臂運行軌跡的規劃
本文所設計的雙電機驅動汽車雨刷控制器高速檔對應運行周期T=1s,低速擋對應運行周期T=1.2s。下面僅就系統處于高速擋時的情況,對司機側和乘客側雨刷臂參考運行軌跡進行規劃。司機側和乘客側雨刷臂起始擺動位置相對于位置芯片設置0°分別為0.0698rad和2.967rad。雨刷系統在運行過程中的約束條件有:最大擺角θ=1.3788rad,角速度θ′≤9rad/s,角加速度θ″≤60rad/s2,兩雨刷臂之間距離d≥50mm。則司機側軌跡函數θd(t)的約束條件如表1所示。
由于雨刷臂到達最遠端過程和返回初始位置過程為互逆過程,雨刷臂一個周期內經歷兩次啟動加速和制動減速至0的過程。所以對應軌跡函數關于t=0.5對稱,在區間0~0.5s斜率從零開始先增大,后減小至零。根據軌跡函數這些特性選擇高斯函數:
Gauss=ae-(x-b)22c2(1)
作為核心,構建司機側軌跡函數為:
θd(t)=2.967-1.3788e-(t-1/2)20.1(2)
其在MATLAB中圖像如圖7中雨刷臂參考運行軌跡。
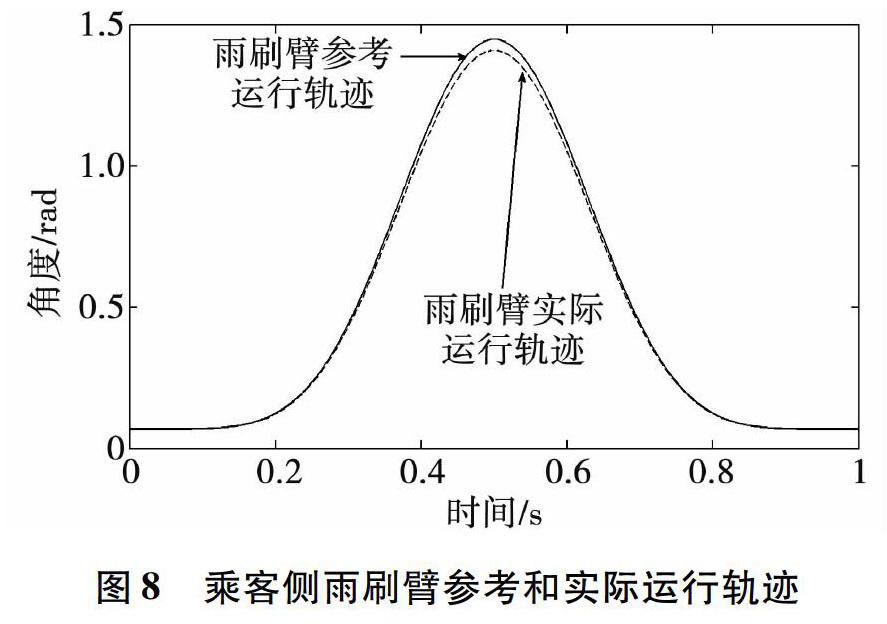
乘客側軌跡函數為
θp(t)=0.0698-1.3788e-(t-1/2)20.1(3)
其在MATLAB中圖像如圖8中雨刷臂參考運行軌跡。
圖7和圖8中司機側和乘客側雨刷臂實際運行軌跡是將系統采集到的雨刷臂一個擺動周期內時間與位置對應的數據通過CAN總線發送給上位機,經過MATLAB曲線擬合后形成。可以看出雨刷臂能夠緊密跟蹤參考運行軌跡。
4 結 論
本文提出了采用CAN總線的雙電機同步控制雨刷系統控制器的設計方法。建立了雨刷臂的參考運行軌跡,并控制雨刷臂實現了對其參考運行軌跡的跟蹤,通過CAN總線對位置信息的傳遞,實現了兩雨刷臂協調同步運行。實驗結果表明,本控制器控制的雙電機汽車雨刷系統同步運行穩定,工作可靠。
參 考 文 獻:
[1] 趙巖,王哈力,蔣貴龍. 汽車智能雨刷系統的設計[J]. 電子科技,2007(2):70-72.
[2] 邵衛. 汽車雨刷機構創新設計研究[J]. 現代制造技術與裝備,2016(1):32-33.
[3] JEAN L. On the Synchronization of a Pair of Independent Windshield Wipers[J]. IEEE Transactionson Control System Technology, 2004,12(5):787-795.
[4] 張生平,劉繼,杜琛. 新型城市軌道車輛雨刮器的研制[J]. 城市軌道交通研究,2013(10):48-49.
[5] CATALIN A, CLAUDIU P. Dynamic Modeling and Control of the Windshield Wiper Mechanisms[C]. Wseas Transactions on Systems, 2009:825-834.
[6] 徐明浩. 雙電機雨刷器硬件平臺與控制算法研究[D]. 長春:吉林大學, 2012:24-34.
[7] RAHUL D Pawar, SHAH S K.A Review: Front Windshield Wiper Controller System for Synchronisation of Two Wiper Motors[C]//International Conference on Pervasive Computing(ICPC). University of Southern California, 2015:100-105.
[8] BOUDJIT K, LARBES C. A New A approach for Synchronisation Multiple Motors using DSP[C]// International Conference on Systems, Signal Processing and Electronics Engineering (ICSSEE), Dubai,2014:216-220.
[9] 趙海燕,陳虹,李姝,等. 基于微分平坦的雙電機雨刷系統控制器設計[C]// Proceedings of the 29th Chinese Control Conference,Beijing,July 2010:29-31.
[10]蔣磊. 雙電機驅動雨刷系統控制方法研[D]. 哈爾濱:哈爾濱工業大學. 2014:34-38.
[11]王仲文,馬原,段瑞珍,等.智能窗CAN總線控制系統設計[J]. 哈爾濱理工大學學報,2013,18(4):20-24.
[12]楊建軍. CAN總線技術在汽車中的應用[J].上海汽車,2007(6):32-34.
[13]朱元,肖宇,吳志紅. 基于XC886單片機的門控系統LIN總線通信模塊設計[J]. 電子元器件應用,2009(8):25-28.
[14]黃儉波,朱文. AT25256與XC886的接口設計與實現[J]. 自動控制與檢測, 2011(5):56-59.
[15]曹平軍,于曉東,竇珂,等. 基于MLX90316的磁性角度傳感器設計[J]. 電子世界,2013(18):135-136.
