列車速度400 km/h的信號系統適應性分析
2018-07-23 12:18:28于曉泉
鐵路通信信號工程技術 2018年6期
于曉泉
(1.北京全路通信信號研究設計院集團有限公司,北京 100070 2.北京市高速鐵路運行控制系統工程技術研究中心,北京 100070)
1 概述
我國現已成為世界上高速鐵路建設和運營規模最大、技術最復雜、運營速度最快、管理最先進的國家,高鐵已經成為一張閃亮的“國家名片”。高速鐵路設計速度分為200~250 km/h和300~350 km/h,分別采用CTCS-2級列控系統系和CTCS-3級列控系統。2016年7月15日,兩列中國標準動車組以超過420 km的時速在鄭徐高鐵上交會,創造了高鐵列車交會、重聯運行速度的世界最高紀錄,但現有CTCS-3級列控系統是否滿足400 km/h的運營控制需求,需進行詳細分析。
2 問題分析
當列車運行速度由350 km/h提升至400 km/h時,將對各個專業提出新的要求,采用400 km/h高速鐵路無砟軌道路基基床結構設計技術、新型高速動車組技術、車站最佳站間距選擇、線路的曲線超高設置等問題均擺在鐵路人員面前。同樣隨著運營速度的提高,對于信號系統也提出更高要求,其中信號系統仍采用CTCS-3級列控系統主用、CTCS-2級列控系統作為后備的方式,信號的各個子系統、基礎設備是否滿足運營要求,均需進行系統性分析。
現有CTCS-3級列控系統運營最高速度為350 km/h,運營速度提高至400 km/h后,動車組對應的制動距離也將增大,故原有接近鎖閉長度無法滿足此時接近鎖閉需求;同時列車制動距離增大將可能影響閉塞分區的長度劃分;接近鎖閉長度也將隨著
運行速度的提高而相應增長;列車運行速度提高其制動時間也將延長,故車站聯鎖進路的延時解鎖時間也將隨著制動時間的延長而增加;軌道電路最短長度受其本身產品特性及列車運行速度的共同制約,站內軌道電路尤為明顯,隨著列車運行速度的提高,軌道電路的最短長度也將相應增加;運行速度提高后所需能量也將變大,從而導致鋼軌中產生的不平衡牽引回流情況也將變大,這將對機車信號的接收及解碼造成不利的影響;CTCS-3級列控系統的后備模式為CTCS-2級系統,CTCS-2級列控系統的最高運行速度為300 km/h,當CTCS-3級列控系統運行速度提高至400 km/h后,由于各種原因導致其轉為CTCS-2級列控系統后,將影響列車原有的運行計劃;列車運行速度提高至400 km/h,可能也無法滿足3 min追蹤要求追蹤間隔。
3 方案分析
3.1 動車組制動距離影響對比
動車組制動距離與列車的運行速度、線路坡度、動車組制動性能、ATP的制動模型等相關,制動距離的長短又影響追蹤間隔、接近鎖閉長度等。動車組的運行速度直接影響列車常用制動距離和緊急制動距離,如圖1所示,在坡度相同的情況下,當運行速度提高后,常用制動距離和緊急制動距離也對應增大,且是非線性關系,速度由350 km/h提升至400 km/h時尤為明顯。
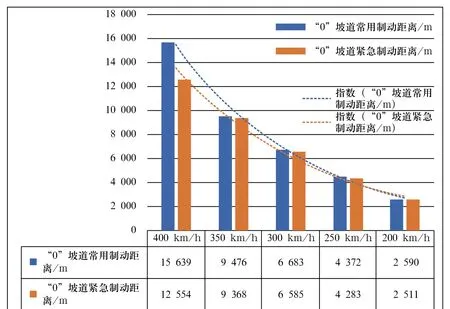
圖1 坡度為“0”時制動距離對比圖Fig.1 Comparison between service braking distance and emergency braking distance under "0" grade
如圖2所示,坡度為-20‰時,動車組常用制動距離和緊急制動距離與相同速度0坡度的對應制動距離相比,常用制動距離和緊急制動距離均增加明顯,且速度越高對應差值越大,即速度越高坡度對制動距離影響越大,亦非線性關系。

圖2 坡度為“0”及“-20‰”時制動距離對比圖Fig.2 Comparision between service braking distance and emergency braking distance under "0" grade and "-20‰" grade
3.2 列車區間追蹤間隔
如圖3所示,列車在區間追蹤時,兩列車之間的最小追蹤間隔由列車制動距離L制、列車安全防護距離L防、前車列車尾部距離所在閉塞分區信號標志牌的距離L1、后車車頭距離防護其運行前方閉塞分區標志牌間的距離L3、列車制動啟模點與防護啟模點所在閉塞分區標志牌之間的距離L2等之和構成。通常情況下,滿足最高運行速度為350 km/h的CTCS-3級列控系統閉塞分區長度設置為2 000 m,CTCS-2級列控系統用7個閉塞分區滿足列車安全追蹤要求,即列車追蹤最小間隔為7個閉塞分區。
列車在區間追蹤運行,當列車速度為400 km/h,坡道按-20‰時,常用制動距離為30 170 m,緊急制動距離為20 849 m。如圖4所示,后續列車以400 km/h速度走行此常用制動距離約需要272 s,無法滿足CTCS-3級列控系統3 min追蹤間隔要求。
而如果閉塞分區仍為2 000 m,則7個閉塞分區距離約為14 000 m,無法滿足動車組常用制動需求。此時如果要求處于后備模式的CTCS-2級列控系統也滿足400 km/h的運輸需求,可以通過增加閉塞分區長度(如閉塞分區長度改為3 000 m,軌道區段長度不變,每個閉塞分區由3個軌道區段組成)實現,也可通過增加對應的閉塞分區個數(如將閉塞分區個數改為8個或9個閉塞分區,但采用增加閉塞分區個數方式時,則需擴容現有軌道電路的低頻信息,增加對應的低頻碼L6、L7等)實現;如果維持現有7個閉塞分區個數不變,且閉塞分區長度也維持2 000 m,則以400 km/h運行在CTCS-3級模式下的動車組,如果轉為CTCS-2級模式控車,需先制動到速度低于300 km/h后再進行模式轉換。
由此可知,動車組運行速度越高,列車制動距離越長;下坡道坡度越大,列車制動距離越長;制動距離越長,列車按最高速度勻速運行的時間也越長;列車追蹤間隔時間大于列車按最高速度勻速運行的時間,故列車速度提高至400 km/h后,按現有系統設置無法滿足3 min追蹤要求,可將追蹤間隔按實際情況進行延長。CTCS-2級列控系統作為后備模式可維持既有系統設置要求,以加大列車運行間隔方式解決400 km/h運行的CTCS-3級列車與300 km/h運行的CTCS-2級列車追蹤運行問題,CTCS-3級列車可先制動降速至300 km/h再轉換成CTCS-2級模式,也可采用前述方案將CTCS-2級列控系統適用范圍提升至400 km/h。
3.3 接近鎖閉
接近鎖閉是所排進路的接近區段被占用以后,進路鎖閉必須在列車、車列通過一定手續和限時方能解鎖的鎖閉。《鐵路信號設計規范》關于接近鎖閉設計規定如下:
“6.2.13接近鎖閉設計應符合下列規定:
……
2 列車進路
1) CTCS-3級區段,接近鎖閉區段長度不小于列控車載設備與RBC最大允許通信中斷時間內列車按設計速度運行的距離與列車最大常用制動距離之和;
2) CTCS-2級區段,接近鎖閉區段長度不小于列車按設計速度運行時的最大常用制動距離;
……”
現有CTCS-2級區段,其列控系統運行速度最高為300 km/h,按鐵路信號設計規范要求,對應接近鎖閉的區段長度如圖5所示。
現有CTCS-3級區段,采用CTCS-3級ATP控車時,其列控系統運行速度最高為350 km/h,按鐵路信號設計規范要求,對應接近鎖閉的區段長度要求如圖6所示。
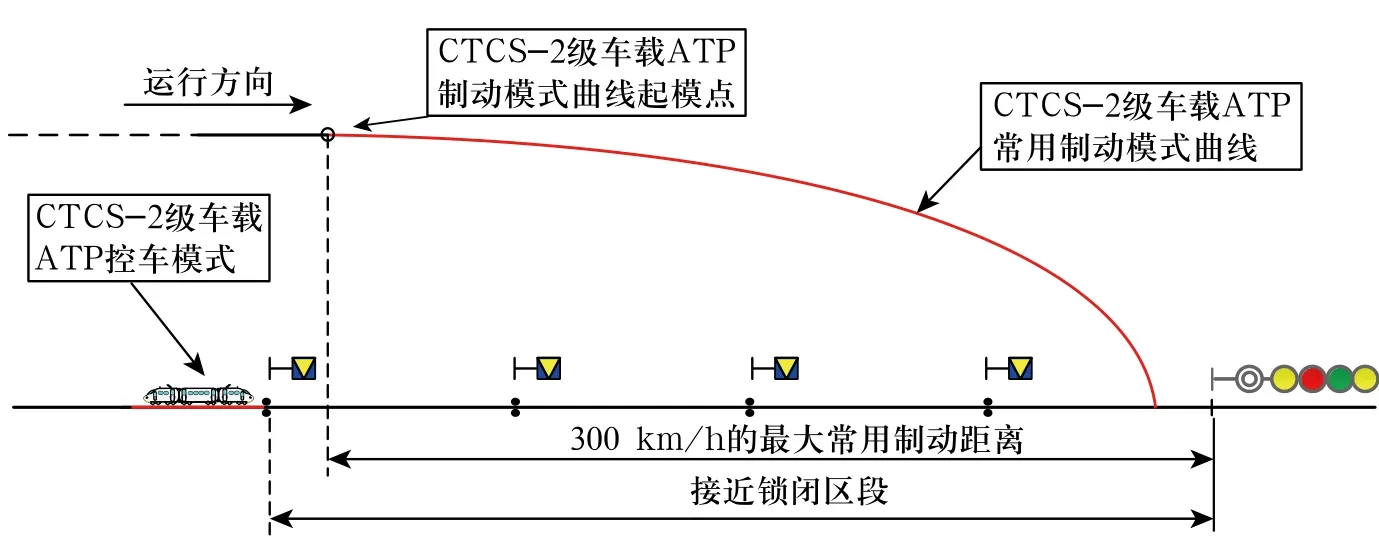
圖5 CTCS-2級區段接近鎖閉區段示意圖Fig.5 Approach locking section under CTCS-2 system
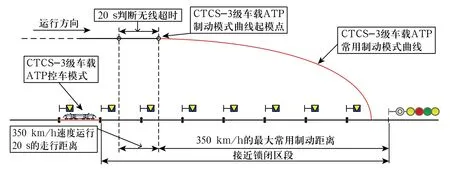
圖6 CTCS-3級區段接近鎖閉區段示意圖Fig.6 Approach locking section under CTCS-3 system
在CTCS-3級區段,列車運行最高速度350 km/h,坡道為“0”條件下,處于CTCS-2級ATP控車時其最高運行速度為300 km/h,故其接近鎖閉區段可由5個閉塞分區構成(閉塞分區長度按2 km估算);處于CTCS-3級ATP控車時其接近鎖閉區段可由8個閉塞分區構成(閉塞分區長度按2 km估算),遠遠大于CTCS-2級ATP控車所需長度,故只要滿足最高速度350 km/h、按CTCS-3級ATP控車時的需求即可。
如表1所示,CTCS-3級區段坡道為“0”時,速度按最高運行速度上浮5 km/h考點,CTCS-3級列控系統與CTCS-2級列控系統接近鎖閉最短長度:
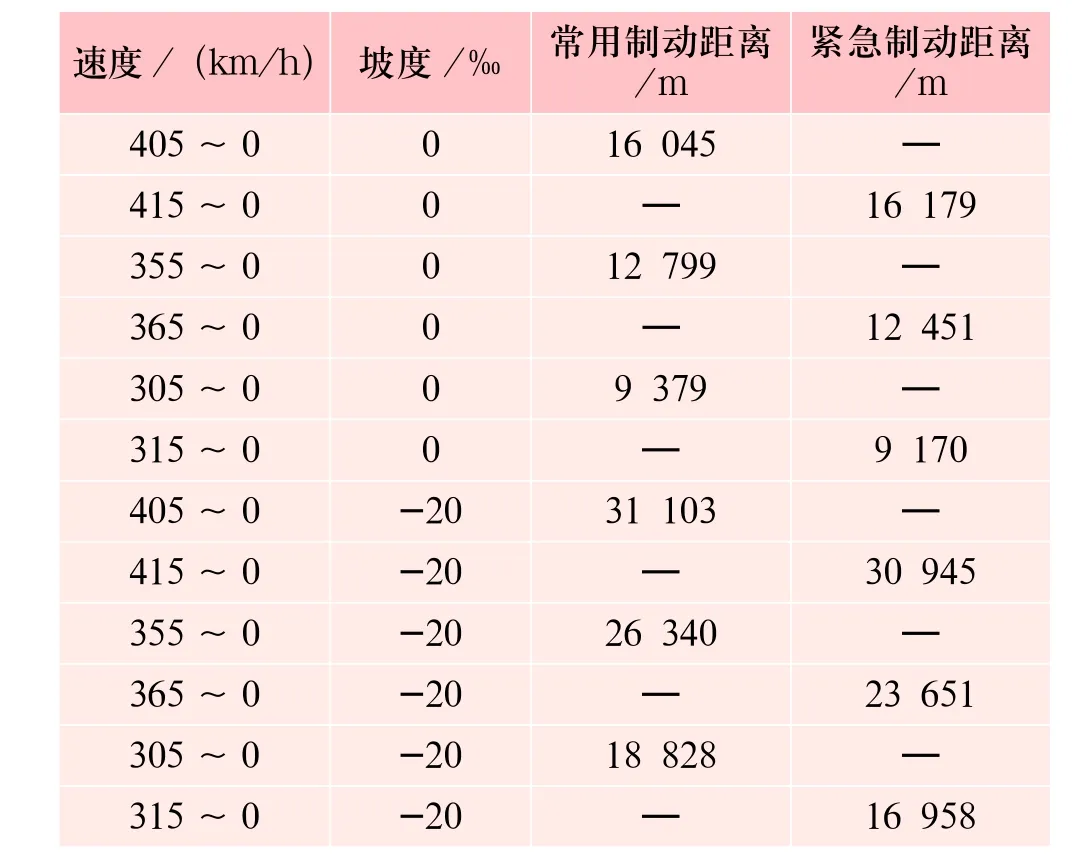
表1 車載ATP控制制動距離估算表Tab.1 Estimation of braking distance controlled by onboard ATP
現有CTCS-3級列控系統“列控車載設備與RBC最大允許通信中斷時間”為20 s,則列車運行速度為355 km/h,其接近鎖閉長度最小值為355×20+12 799≈14 771 m;列車運行速度為405 km/h,其接近鎖閉長度最小值為 405×20+16 045≈18 295 m。
現有CTCS-2級列控系統最高運行速度為305 km/h,其接近鎖閉長度最小值為9 376 m;如果將CTCS-2級列控系統適用范圍提升至400 km/h,其接近鎖閉長度最小值為18 295 m。

圖7 碼序與車載ATP監控模式曲線之間關系示意圖Fig.7 Relationship between codes sequence with onboard ATP supervising mode curve
接近鎖閉長度最終取值應以18 295 m為基礎,結合閉塞分區劃分情況,按閉塞分區個數及對應長度確定聯鎖最終的接近鎖閉長度。
3.4 后備模式影響
如圖7所示,CTCS-2級列控系統作為CTCS-3級列控系統后備模式,其在現有條件下適應最高運行速度為300 km/h,閉塞分區長度通常按2 km左右設置,碼序按L5、L4、L3、L2、L、LU、U、HU設置,即采用7個閉塞分區約14 km長度,滿足300 km/h速度下,大于或等于列控監控模式曲線制動距離及列車安全防護距離之和的要求。
在同一條線路上,開行不同速度列車會導致區間運行時分之差。兩列列車速差越大,區間運行時分差值越大,影響列車通過能力就越大。以京滬高鐵為例,目前京滬高速鐵路開行300 km/h和350 km/h兩種速度等級的動車組,2017年9月21日開始每天開行了7對350 km/h速度等級的復興號動車組,不可避免在中間站要越行速度等級300 km/h的動車組,導致被越行列車的停站時間過長,降低了區間通過能力。
越行可以分為單列車越行單列車、單列車越行多列車、多列車越行單列車、多列車越行多列車等,最簡單的單列車越行單列車時,被越行列車的停站時間一般在6~7 min,遠大于一般的停車時間(2 min)。越行越復雜,被越行列車的停站時間越長,產生的運行圖空檔越大,越難以被充分利用,造成能力損失的可能性也就越大。開行400 km/h動車組的線路,如果列車均為運行速度400 km/h的列車,當某列車CTCS-3級車載設備因無線超時或故障等原因降級為CTCS-2級運行時,列車將降速運行,增大列車運行間隔、降低線路的通過能力,給本線的正常運輸組織造成嚴重影響。
3.5 其他影響
現有ZPW-2000A軌道電路應用條件為鋼軌牽引回流不大于1 000 A,不平衡牽引電流不應大于100 A。軌道電路信息接收及機車信號譯碼功能主要受FSK信息的信號質量及持續時間影響,FSK信號質量易受列車牽引諧波干擾影響,列車按400 km/h速度運行時,相對于350 km/h牽引功率將增大,牽引電流和諧波干擾也將隨之增大,故將對FSK信息的信號質量產生一定的影響。
為滿足聯鎖正常解鎖及機車信號可靠接收,《鐵路信號設計規范》中關于軌道區段設置有如下規定:
“4.1.6站內軌道區段的長度應符合下列規定:
1)需為聯鎖設備提供鎖閉與解鎖條件時,不得小于聯鎖系統正常解鎖所需的最小長度(Lmin1),Lmin1按公式(1)計算

式中:vmax——軌道區段的線路設計速度(m/s);t1——軌道占用檢查裝置及聯鎖設備響應時間之和(s);
L車——機車首末輪對中心間距離的最小值(m)。
2)需為車載信號設備提供機車信號信息時,不得小于列車按設計速度運行時車載信號設備可靠工作所需的最小長度(Lmin2),Lmin2按公式(2)計算。

式中:vmax——軌道區段的線路設計速度(m/s);
t2——以單獨的發碼設備疊加于軌道電路實現電碼化時為軌道電路及車載信號設備響應時間之和(s),采用ZPW-2000系列軌道電路時為車載信號設備響應時間的最大值(s);
L余——余量(m),典型值為20 m。
注:當采用列車占用疊加發碼時,Lmin2是對單個發碼區段最小長度的要求;采用預疊加發碼時,Lmin2是對占用區段和相鄰預發碼區段長度之和的要求。
由于接收軌到電路信息后機車信號譯碼時間不變,上述公式中的vmax由350 km/h提高至400 km/h,現有滿足機車信號接收機譯碼時間的最短軌道電路長度也需相應增長。
4 結論
列車運行速度提升至400 km/h后,信號專業的CTCS-3級列控系統總體上能夠適應相關運營需求,但個別子系統配置、參數等需針對400 km/h速度進行適應性調整,部分設備應用環境等也需配套驗證,如驗證大功率牽引電流對BTM、TCR工作電磁環境的影響,振動沖擊、車體橫縱向偏移對BTM、TCR工作的影響等。以上分析均以-20‰坡道為基礎,后續還需根據規400 km/h線路所對應的實際坡度進行更詳細分析。
CTCS-3級列控系統車—地之間信息傳輸采用了GSM-R的無線模式,現有GSM-R基站的現場布置是按滿足最高運行速度350 km/h設置,當列車運行速度提高至400 km/h后,為滿足CTCS-3級列控系統對車—地通信的相關指標要求,現場基站布置方案可能也需要相應調整。
5 結束語
隨著科技飛速發展,社會的現代化進程也在加快,人民群眾對出行及貨物運輸的時間要求也越來越高,勢必將驅動鐵路系統在保證安全的前提下,進一步提高運營速度、壓縮列車運行間隔,這在給信號系統帶來空前壓力的同時,也給信號系統的迅速發展提供了強大的動力。信號系統是保證鐵路運輸安全的核心系統,其針對400 km/h及以上的適應性研究也需盡快開展。本文僅針對CTCS-3級列控系統的主要功能進行了分析,未對其相關的全部功能如聯鎖延時解鎖等進行細致的考量,也未對追蹤間隔給出明確的追蹤時間,后續仍需進行進一步的詳細分析。
信號系統是一個較為復雜的系統,承擔著平衡列車安全運行與列車運輸效率的責任,在滿足400 km/h的運營速度前提下,運輸效率也需同步進行系統性的分析。
