基于隨機森林的月球表面軟著陸實時最優控制
2018-07-23 08:54:02,,,
中國空間科學技術 2018年3期
關鍵詞:模型
,,,
1. 中國科學技術大學 自動化系,合肥 230027 2. 宇航動力學國家重點實驗室,西安 710043
中國的探月工程于2004年啟動,將探月工程分為“繞”、“落”、“回”3個階段,在“落”和“回”兩個過程中,軟著陸作為一項關鍵技術,既是研究熱點,也是技術難點。在進行月球表面探測時,需要使著陸器實現月球表面軟著陸,以確保人員及設備安全。在大部分軌跡優化問題中,燃料是制約航天器軌跡設計的主要因素,故本文主要針對燃料最優進行落月軌跡的優化設計。
對于月球表面軟著陸問題國內外不少學者都進行了相關研究,文獻[1]將一種求解最優控制問題的新方法——高斯偽譜法和傳統的直接打靶法有效結合,對月球著陸器定點軟著陸軌道快速優化問題做了研究;文獻[2]采用改進的遺傳算法對航天器飛行軌跡進行優化,并結合動態終跡圈方法進行制導控制;文獻[3]提出基于目標點在軌自主選定的月球精確軟著陸方案,對月球精確軟著陸最優標稱軌跡在軌快速規劃制導方法進行研究;文獻[4]采用李雅普諾夫直接法,構造了基于能量的李雅普諾夫函數,設計了跟蹤制導滑模制導律;以上的控制方法普遍存在的問題就是對于入軌存在偏差的情況下,需要重新計算著陸器的下降軌道,但由于整個下降過程時間短,計算軌道需要求解的非線性方程復雜,耗時長,往往不能達到實時控制的目的[5]。
近年來,隨著人工智能技術的研究,其功能也逐漸從圖像、語音識別處理發展到越來越廣闊的范圍。利用人工智能解決運動控制中的問題也得到了更多的關注。文獻[6]中提出了一種基于神經網絡的機器人自主避障控制方法,讓機器人在行走過程中通過對障礙物位置的確定實時規劃新的路線;文獻[7]利用隨機森林對機器人手臂進行軌跡控制,使機器人能夠平穩地完成抓取過程;文獻[8]利用深度神經網絡與比例-積分-微分(Proportional-Integral-Derivative,PID)控制器結合的方法對四旋翼飛行器進行軌跡優化控制,通過大量訓練使得模型具有強泛化能力,保證飛行器在遇到訓練中未曾出現的軌跡時依然能夠保持良好的跟蹤精度;文獻[9]提出一種考慮動態不確定因素的深空探測器任務規劃算法,利用模糊神經網絡評估擾動等級并設計相應控制律。針對傳統落月軌道控制中由于噪聲或入軌偏差造成的軌跡偏離,若采用之前方法,需在線重新求解復雜的非線性方程,計算時間長,控制實時性差,不能確保任務順利完成。本文采用的隨機森林模型[10]是通過離線訓練模型,當實際執行任務時只需進行簡單的線性計算就能通過航天器狀態量得到其控制量,可以滿足實時控制的要求。
本文通過對航天器從近月點經過制動段,接近段過程進行動力學建模,并成功將隨機森林模型應用于著陸整個過程的實時最優控制中,由于隨機森林模型對于數據維數少、數據量大的問題具有良好的抵抗過擬合的能力,從而在月球表面軟著陸過程中可以不依賴于動力學模型而只根據訓練數據實時產生最優控制量進行軌跡重規劃。同時,由于該方法不依賴于動力學模型的性質,可用于解決動力學模型更加復雜的任務如火星表面降落,以及運載火箭重返地球等問題。
1 軟著陸動力學模型
由于月球周圍沒有大氣存在,故著陸器所受控制力完全由其自身控制系統提供。所謂月球表面軟著陸是指著陸器從近月點附近,在制動系統作用下以很小的速度降落到月球表面的過程。由于航天器在執行探月任務時主要的燃料消耗就是從近月點到月球表面的過程,故本文針對該過程進行研究,將該過程分為3個階段:制動段,接近段和著陸段,圖1形象地表示出了這3個階段。由于三維模型和二維模型原理相同,但計算時間上二維模型要遠小于三維模型,故本文所考慮情況均以二維模型為研究對象。
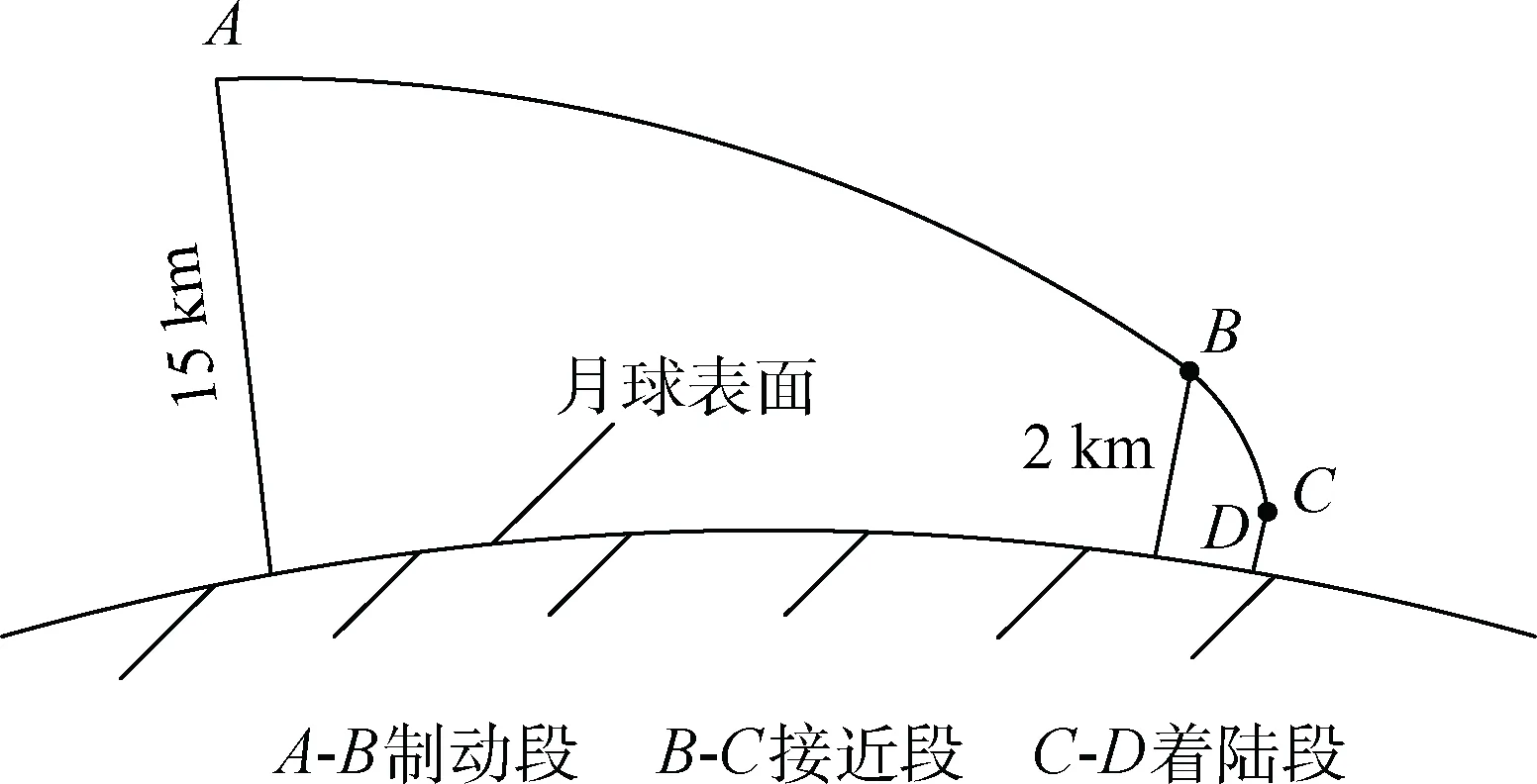
圖1 著陸器降落軌道分段示意Fig.1 Trajectory stages of lander
1.1 制動段動力學模型
制動段一般指著陸器從近月點即距離月球表面15 km處到距離月球表面2 km高度的制動飛行過程。建模時考慮到月球表面沒有大氣,且軟著陸過程較短,則其他攝動項可以忽略。設定著陸器在此階段為恒定推力大小,優化變量為推力角,即推力方向與航天器與月心連線夾角,因此,該過程動力學模型可以表示為[11]:
(1)

1.2 接近段動力學模型
接近段一般指著陸器從距離月球表面2 km到10 m的下降過程,該段下降時間短,且由于著陸器接近于垂直下降,因而經過的月球表面距離很短,故此段可以將月球表面視為平面進行計算,如圖2所示。
該過程動力學模型可以表示為[12]:
(2)
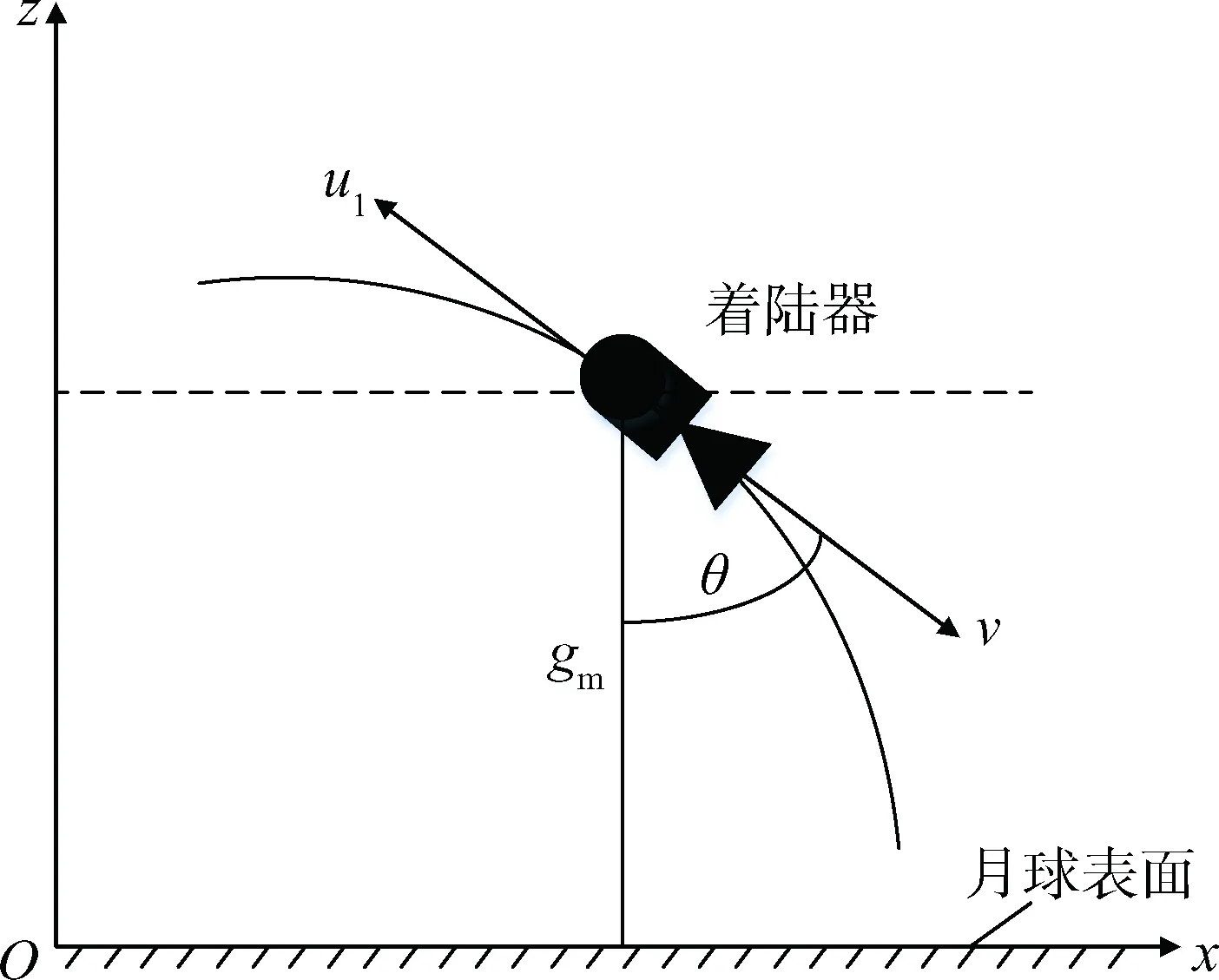
圖2 著陸器接近段示意Fig.2 Stage of descend phase

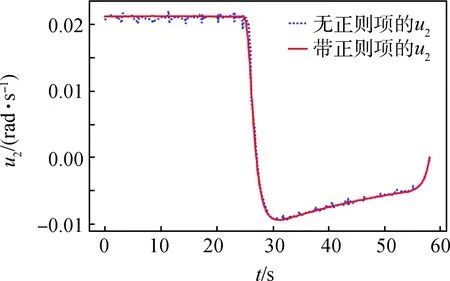
圖3 有無正則項的俯仰角速率Fig.3 Pitch rate with and without regularization
2 產生訓練數據
對于上述的每個階段都需要產生一個包含最優狀態量x*,一個最優控制量u*的數據對(x*,u*)。用高斯偽譜最優控制軟件(General Pseudospectral Optimal Control Software,GPOPS)來產生這些最優狀態和控制量的數據對,GPOPS是利用高斯維譜法求解有約束非線性規劃問題的一個MATLAB工具包[14-15]。在GPOPS中,通過利用稀疏非線性優化器處理相應的非線性規劃問題[14]。雖然可以通過它來產生最優軌跡上的數據,但是由于其計算量大,并不適合用于實時計算,故本文只用它來產生仿真所需的訓練數據。
由于降落過程的每一段需要優化的變量不同,用于訓練模型的樣本數量也不完全相同。對于制動段,選擇初始點位于距離月球表面15 km附近的一個范圍作為合理范圍,產生不同初始位置的200條軌跡,每一條軌跡上包含400個點,這樣就得到了80 000個包含最優狀態和最優控制量的數據對;而對于接近段,由于其控制量變化相對復雜,產生了5 000條軌跡,每條軌跡80~100個點,共產生約400 000個包含最優狀態和最優控制量的數據對。用其中80%作為訓練數據用于訓練模型,10%作為驗證數據用于模型調參,10%作為測試數據用于驗證模型好壞。在訓練過程中,將狀態量x*作為輸入,將控制量u*作為輸出。其中,在制動段中將推力角作為訓練標簽訓練模型,在接近段中將發動機推力和俯仰角速率作為輸出,這樣分別單獨地訓練3個隨機森林結構。
3 隨機森林模型
隨機森林(如圖4所示)是一種集成結構模型,由多個決策樹組成,單個決策樹可以看成是弱學習器,而將多個弱學習器組合則形成了強學習器。對于分類問題,每棵決策樹會對結果的類別進行判斷,而隨機森林進行投票,選出結果最多的作為最終結果。對于所研究的連續問題預測,采用的每一棵樹為回歸樹,其輸出是所有決策樹的平均值,由于隨機森林中的每一棵決策樹之間是沒有聯系的,故其泛化能力(即對訓練集外的樣本產生好的預測的能力)要比單棵決策樹強很多[16]。
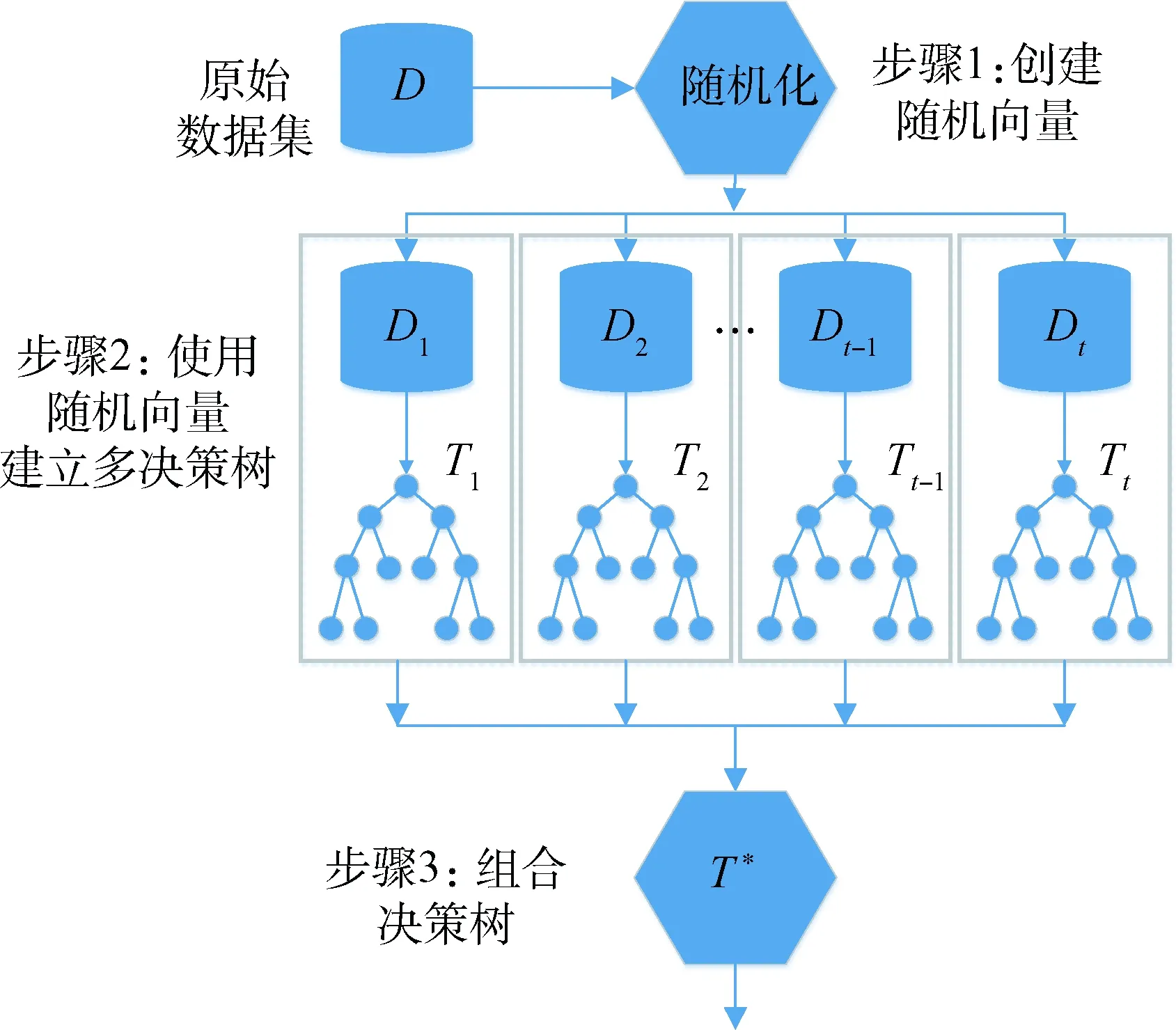
圖4 隨機森林Fig.4 Random forest
對于每棵樹,使用的訓練集是從總的訓練集中由放回隨機采樣出來的,這意味著總的訓練集中的有些樣本可能多次出現在一棵樹的訓練集中,也可能從未出現在一棵樹的訓練集中。同時,“隨機”不僅體現在對樣本數量的采樣隨機性,其選取的樣本特征也是隨機從總的樣本特征中選取。隨機森林的算法有很多良好的特性,由于其各個弱分類器之間沒有聯系,這大大減小了調參難度,而一般只有在數據量巨大的時候才會選取神經網絡等復雜模型,選擇隨機森林模型即使使用默認參數,在大多數數據集上依然能得到較好的結果,所以綜合考慮調參難度、數據特征和計算機建模時間,本文采用了隨機森林模型。但同時其也有一定的缺點,如過擬合,即模型在訓練集上表現良好而在測試集上誤差很大,故在做驗證的時候要對數據在訓練集上的精度和在測試集上的精度做出權衡,如果構建的模型過于精細那么模型在訓練集上的表現會很好,但是其泛化能力就會很弱,這就是過擬合產生的結果。利用Python的sklearn庫中RandomForestRegressor來設計隨機森林模型,經過調參最終參數如下:對于制動段,設置所有參數均為默認參數。對于接近段,在考慮推力大小u1時,由于將其看成只有兩類的分類問題,故對于u1,模型使用默認參數依然能得到準確的結果;對于u2,經過調參得到最大弱學習器個數n_estimators=850,放回采樣bootstrap=True,決策樹最大深度max_depth=15,葉節點最小樣本數min_samples_leaf=5,在做參數設置時,根據采用的訓練集大小,設定了樹的個數在500~1 500之間每增加50棵樹,進行一次運算,最終得到當樹個數為850時效果最佳,在設置max_depth時由于其代表了隨機森林中每棵樹的最大深度,如果不對該值進行設置,則樹的深度將一直延伸,限制了樹深度,可以防止模型只在訓練集上表現良好而在測試集上表現差。在設置min_samples_leaf的時候沒有將每個節點都設置成只有一個樣本,因為這樣做會造成過擬合,同時,由于min_samples_leaf的設置及隨機采樣bootstrap的應用降低了外部噪聲對隨機森林模型的影響,其余參數為系統默認參數,這樣限制了每棵決策樹不會成長的太長,從而在很大程度上避免了過擬合的發生。
4 仿真分析



圖5 制動段各狀態量變化Fig.5 State history of deboost phase
得到最優控制與利用設計模型估計的軌跡,在執行的終點位置,各狀態量終點誤差r約為50 m,θ小于0.000 1 rad,vr為1 m/s,vθ為3 m/s,由此得到雖然選取的初始狀態在訓練集外,但最終結果只有r誤差較大,故在設計下一階段接近段模型初始狀態時可以在初始位置上適當增大訓練范圍。

得到最優估計與利用設計模型估計的軌跡,在執行的終點位置,各狀態量誤差x約為2 m,z誤差約為10 m,vx約為0.03 m/s,vz約為0.0 m/s,對于月球表面軟著陸問題,一般考慮合理的誤差范圍為位置誤差10 m,速度誤差1 m/s[17],故試驗得到的結果在誤差范圍內,滿足精度要求。在根據給定的初始狀態利用GPOPS求解一條包含200個狀態點的最優軌跡時間約為1 min(Intel Core i5-2400@3.10 GHz),而同樣配置的計算機在利用隨機森林結構根據給定的狀態計算控制量所需計算時間約為0.015 s,而計算整條軌跡約1 s。
5 結束語
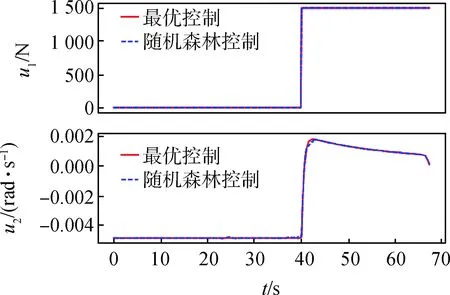
圖6 接近段控制量變化Fig.6 Control history of descent phase


圖7 接近段各狀態量變化Fig.7 State history of descent phase
本文針對傳統控制方法對于解決航天器月球表面軟著陸過程中存在入軌偏差,傳統控制方法計算量大,實時性差的問題提出了一種基于隨機森林結構的智能控制方法,通過對隨機森林結構的訓練使得模型能夠根據給定的狀態量對最優控制量進行預測。將月球表面軟著陸問題分成3段進行討論,通過設計的模型使得在第一段結束后航天器狀態的誤差在第二段訓練設計的訓練集范圍內,這樣保證了航天器即使初始狀態超出訓練范圍也能通過每一段降落過程逐漸縮小其誤差,最終達到任務要求的誤差范圍。仿真試驗驗證了所設計模型的優越性,對于解決運動控制中實時性要求較高的問題解決提供了新方法。
本文所研究對象為月球表面軟著陸,由于月球表面無大氣作用,且對控制系統執行力以及測量傳感器等的假設都處于理想狀態,故若結合工程實際,所需考慮的因素需更多,在后續處理中可以增加對訓練集添加噪聲,引入控制系統時延以及執行力誤差等多方面因素以滿足實際工程任務需求。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19