基于逆變器死區補償電流極性檢測方法的改進
2018-07-21 07:35:16
制造業自動化 2018年7期
(安徽職業技術學院 機電工程學院,合肥 230011)
0 引言
隨著現代控制理論和電力電子技術的發展,促進了逆變技術的高速發展與應用,其中死區補償問題成為研究熱點問題之一[1,2]。由于控制逆變器的開關元件存在導通和關斷時間,為了避免在同一橋臂上的兩個開關發生“直通”,在控制信號中必須設置死區時間。在每一個調制周期均會不斷累積由于死區時間的存在而引起的微小畸變, 從而導致逆變器的輸出電壓、電流波形產生畸變失真,電機轉矩特性降低,以及系統穩定性差等一系列問題。死區效應在變頻電機低速運行時尤其明顯[3~5]。如果電流極性檢測不準確,就不能準確地修正PWM脈寬,結果造成誤補償,最終不僅不能降低死區的影響,反而加重逆變后的波形畸變,所以電流極性的檢測是死區補償的重要環節[6,7]。因此找到一種能夠精確快速檢測電流極性的方法至關重要。
從理論分析來看,通過過零點檢測可以快速地判斷出電流極性。但是采用直接檢測電流過零點的方法對電流噪聲、頻率和幅值的變化影響很大,使得電流發生畸變,產生大量諧波,導致電流過零點模糊。尤其是電機在小電流低速工況下,由于存在著零電流鉗位現象和脈寬調制噪聲的影響,諧波電流分量較多,導致檢測中出現多個電流過零點,很難保證電流極性檢測的精度。
目前常用的電流極性方法有軟件實現法、電流互感器法、坐標變換法等。電流互感器法為了確定輸出電流的極性,通常是將電流反饋信號與地電位比較[8]。該方法要對采集的電流信號進行濾波或滯環比較等處理,這會造成電流信號相位的滯后,特別是在小電流的情況下,誤差會更大。軟件實現法是基于幅相控制的方法,通過電壓互感器和電流互感器檢測相電流與線電壓的夾角,并根據此夾角計算功率因數角,進而得到相電流的矢量角,再利用此矢量角的范圍判斷出電流的極性[9~11]。此方法通過測量變頻器輸入側的電壓與電流來代替變頻器輸出側的電壓與電流,克服了輸出側脈沖波形不利于測量的難點。但是該方法增加了CT、PT以及實現電量計算的芯片,導致增加了大量的硬件電路,使補償的成本增加,而且該方法在求出電流矢量角后,還需要再確定電流的方向,計算過程復雜。坐標變換法是對電流進行矢量分解,利用電流矢量角來間接判斷電流的極性[12,13]。該方法在電流通過低通濾波器后,不會改變直流部分基波分量的幅值以及相位,解決了信號滯后的問題。但是該方法計算復雜且需要較多的存儲空間來存儲6個區域的電流極性。
為解決上述問題, 本文在基于空間矢量的死區補償方法基礎上,改進了傳統坐標變換的檢測方法。首先將檢測到的交流電流通過dq變換,從三相靜止abc坐標系轉換到同步旋轉dq坐標系中,經過低通濾波器濾波得到兩相直流電流;再通過2/3坐標變換,將旋轉坐標系下直流電流轉換成的三相交流基波電流;最后直接判斷出三相電流的極性。該方法具有良好的工程應用前景。
1 坐標變換法電流極性檢測原理
由于對直流分量進行濾波,不會影響其幅值和相位,因此首先通過dq變換,將三相交流電流的基波分量轉換成同步旋轉坐標系下的直流分量。然后將該直流分量通過低通濾波器,并根據濾波后的直流電流計算出電流矢量角,再通過該矢量角確定三相電流的極性。現分別用ia、ib、ic來表示三相電流,假設其表達式如下:

式中,iha、ihb、ihc分別為三相定子電流的高頻分量。
利用dq變換把三相交流電流從abc坐標系變換到dq坐標系下。設由三相基波交流電流變換后的直流分量分別為isd、isq,而ihd、ihq則是由三相電流信號中的高頻分量變換到旋轉坐標系下得到的高次諧波。其中,可以通過低通濾波器濾除該高頻分量,對于直流分量的幅值和相位則不會因低通濾波器的增加而發生變化。電流矢量的空間關系如圖1所示,其中,θs為dq旋轉坐標系下同步旋轉的角度,為d軸與電流矢量的夾角,其值由式(2)確定,而電流矢量的空間位置角θ可根據式(3)確定。通過坐標變換以及低通濾波器濾波后的空間位置角θ,其精度會有較大幅度的提高,從而使電流矢量的空間位置角可以更趨近于其真實角度。
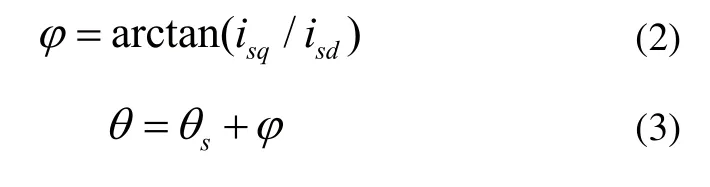
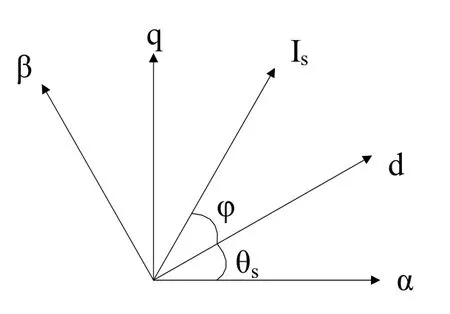
圖1 電流矢量的空間關系
6個補償區域的三相電流極性分布如圖2所示(“+”表示極性為正,“-”表示極性為負,例如:假設三相電流ia、ib、ic相序極性為“正負負”,即表示為“+--”),a、b、c分別為6個待補償相的序號。由此可得到空間矢量角θ對應地三相電流極性,如表1所示。通過空間矢量角θ可以準確、快速地確定三相電流的極性。

圖2 三相電流極性空間分布

表1 空間矢量角θ與三相電流極性的對應關系表
2 坐標變換檢測方法的改進
假設對檢測到的三相電流信號分別用ia、ib、ic表示,三相電流信號中除了含有基波分量外,還存在較多的諧波分量,由于這些諧波分量的存在,使得電流的波形發生畸變。利用式(4)的坐標變換,把從abc坐標系中的三相電流信號變換到dq坐標系下,得到id和iq兩個分量。

根據三相電流信號中的基波分量和諧波分量,利用式(5)對id和iq進行分解:
其中isd、isq是同步旋轉dq坐標系下的直流分量,該分量是由三相靜止坐標系下的基波電流變換而來,而ihd、ihq為dq同步旋轉坐標系下的高次諧波分量,此分量是通過三相靜止坐標系下電流高頻分量變換得到。然后對id和iq進行濾波,除去電流信號中的高頻分量,濾波后得到的是由基波電流轉化來的直流電流。再將該直流電流分別通過式(6)和式(7)變換公式,把濾波得到直流電流變換成三相靜止坐標系下的基波交流電流。
式(6)為兩相旋轉坐標系到兩相靜止坐標系的變換矩陣,其中?為直流分量isd與ia的夾角。式(7)為兩相靜止正交坐標系到三相靜止坐標系的變換矩陣。由式(6)與式(7)得到的三相交流電流可寫為下式:
根據式(8)即可直接判斷出三相電流的正負極性。
由于濾波后的直流電流位于兩相旋轉坐標系下,經過坐標變換,將旋轉dq兩相坐標系變換成靜止abc三相坐標系,此時a、b、c三相交流電流信號已經濾除掉了其中的諧波分量,僅含有基波分量。此時,可以根據基波電流直接判斷出電流的極性,避免了傳統的坐標變換檢測方法中通過矢量角劃分區域的方式來判斷電流極性的繁瑣。與傳統的方法相比本文的檢測方法更加簡單易懂,不僅減少了計算量,而且避免了傳統方法中判斷空間矢量角所處區間的繁雜以及省去存儲芯片的設置問題,加快了電流極性檢測的速率,最終使PWM波形更加快速地得到修正。
3 仿真驗證
首先建立一個帶有死區設置的三相SVPWM逆變電路模型進行仿真實驗,然后根據測量元件得到三相電流信號,最后將多種電流極性檢測方法與本文所提檢測方法進行對比,檢驗本文所提方法的有效性。
假設三相逆變器輸出的是頻率為50Hz,額定電壓為380V的交流電,三相定子的電阻值為20Ω,電感值為10mH,同步旋轉角頻率為100πrad/s,將死區時間設置為4μs。
為了在示波器中直觀地觀察電流極性的變化情況,在此將電流的正極性設為1,電流的負極性設為-1。以c相電流信號為例,利用觀察到的c相電流波形,可直接根據其過零點情況確定電流的極性,檢測結果如圖3所示。
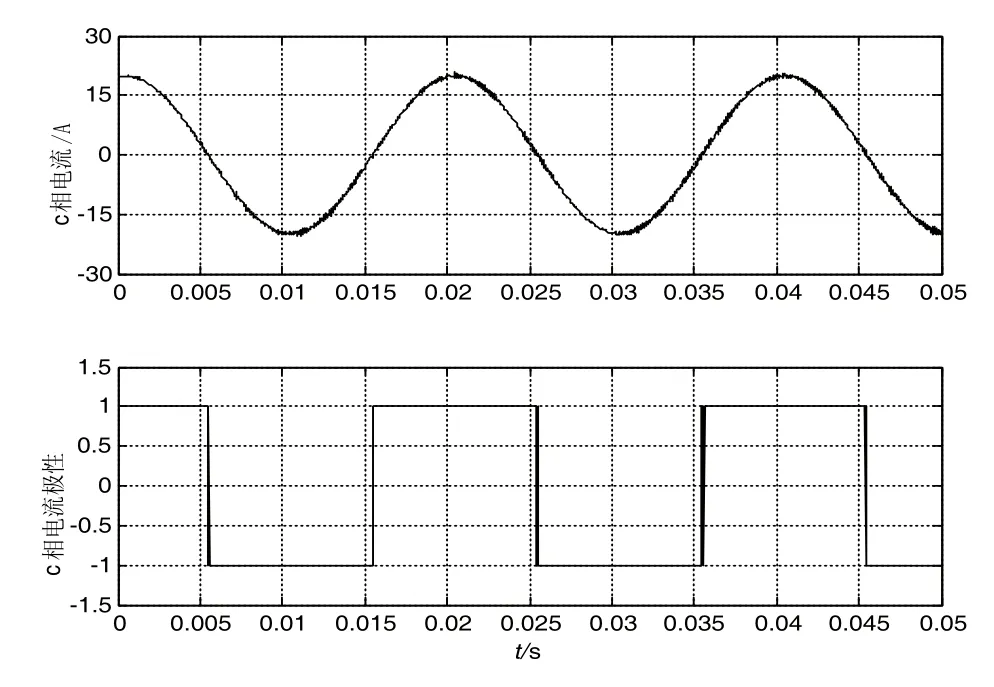
圖3 直接檢測時的電流及其極性圖
從電流波形圖中可以看出,c相電流中存在大量的諧波。現直接利用電流過零對電流極性進行檢測,并從波形圖中選取一處過零點放大觀察,其放大結果如圖4所示。在波形圖中可看出此處有多個過零點情況,與之對應的極性圖中電流的極性也在正、負之間反復變化,無法準確判斷出電流極性。
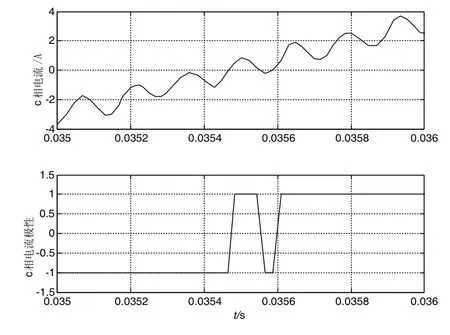
圖4 示波器過零點處放大波形
再通過本文所提的方法對檢測到的c相電流信號,首先經過坐標變換,然后進行低通濾波,最后再通過坐標變換將其變換到原坐標系中,得到去除諧波后的電流信號,其結果如圖5所示。
從圖5中可以看出,此時的電流信號中已經沒有高頻諧波。相應地,在電流過零點處,也沒有出現多次極性跳變的現象,即過零點唯一,可準確判斷出電流極性。

圖5 新方法處理后電流波形及其極性圖
將上述檢測到的原c相電流信號通過傳統坐標變換法對電流極性進行檢測,再將由該方法得到的電流極性圖與本文所提方法檢測得到的電流極性圖進行比較,其結果如圖6所示。

圖6 c相電流用兩種方法檢測到的極性圖
經過對比,不難看出兩種方法檢測到的電流極性結果完全相同,由此表明了本文所提方法對電流極性檢測的準確性,并且該方法與傳統坐標變換法相比省去了復雜的反函數計算和區間極性的選擇等問題,使得模型更加簡單,便于實際應用推廣。
4 結束語
文章討論了電流極性檢測對逆變器死區補償的影響,以及電流極性檢測常用的方法。針對空間矢量脈寬調制補償法的電流極性檢測問題,本文提出了一種能夠準確、快速地定子電流極性檢測方法。該方法首先將三相交流電流信號從abc坐標系變換到dq坐標系下,得到兩相直流電流;再用低通濾波器對其進行濾波,通過兩相靜止坐標系變換矩陣和三相靜止坐標系變換矩陣,將濾波得到的直流電流變換成基波交流電流,即由兩相旋轉坐標系變換成三相靜止坐標系;最后通過交流電流的過零點情況可準確獲得其極性。通過仿真實驗,將本文方法分別與直接過零點檢測法以及傳統的坐標變換法進行對比,表明了本文算法的準確性和實用性。因此本文方法簡單,計算量小,寄存器使用率低,具有良好的工程應用前景。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
海峽科技與產業(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12