停機工況下風(fēng)電機組的載荷對比分析
2018-07-19 01:50:38王煜翔田德閆肖蒙林俊杰羅濤
風(fēng)能 2018年5期
關(guān)鍵詞:模型
文 | 王煜翔,田德,閆肖蒙,林俊杰,羅濤
(作者單位:華北電力大學(xué)可再生能源學(xué)院)
風(fēng)電機組運行在復(fù)雜的自然環(huán)境中,所受載荷情況非常復(fù)雜,載荷計算是風(fēng)電機組認證和設(shè)計中的首要問題,是結(jié)構(gòu)強度校核與部件選型的基礎(chǔ)。風(fēng)電機組廠家在機組設(shè)計過程中,如果設(shè)計載荷偏低,當(dāng)遇到極端風(fēng)況時,風(fēng)電機組輕則出現(xiàn)故障,重則發(fā)生機組倒塌事故,造成嚴(yán)重的經(jīng)濟損失;如果設(shè)計載荷偏高,對材料的性能要求過高,從而大幅度增加風(fēng)電機組的總體造價。因此,載荷計算在風(fēng)電機組設(shè)計中占著重要的地位。
目前,風(fēng)電機組載荷計算大部分采用國際通用標(biāo)準(zhǔn)——國際電工委員會2005年修訂的IEC 61400-1標(biāo)準(zhǔn)(以下簡稱IEC2005)。IEC2005標(biāo)準(zhǔn)有8種設(shè)計工況,包括:發(fā)電、發(fā)電兼故障、起動、正常關(guān)機、緊急關(guān)機、停機、停機兼故障以及運輸組裝維護與修理。其中,停機工況分為靜止和空轉(zhuǎn)兩種狀態(tài),但是停機工況下的載荷設(shè)計是以靜止?fàn)顟B(tài)的載荷計算結(jié)果為依據(jù),還是以空轉(zhuǎn)狀態(tài)下的載荷計算結(jié)果為依據(jù),目前尚無定論。基于此,本文以1.5MW水平軸風(fēng)電機組為模型,對停機工況下的靜止和空轉(zhuǎn)狀態(tài)的載荷計算結(jié)果進行對比分析,得出停機工況下的載荷設(shè)計依據(jù)。
風(fēng)電機組模型參數(shù)
載荷計算采用1.5MW雙饋異步風(fēng)電機組模型,詳細參數(shù)如表1所示;機組安全等級 A。風(fēng)電機組安全等級基本參數(shù)如表2所示。
停機風(fēng)況介紹
根據(jù)IEC2005,停機工況分為兩種風(fēng)況,極端風(fēng)速模型(EWM)和正常湍流模型(NTM)。
一、極端風(fēng)速模型(EWM)
極端風(fēng)速模型應(yīng)是穩(wěn)態(tài)風(fēng)速模型或湍流風(fēng)速模型,該風(fēng)速模型是基于參考風(fēng)速Vref與恒定的湍流標(biāo)準(zhǔn)偏差σ1。
對于穩(wěn)態(tài)風(fēng)速模型,50年一遇和1年一遇的極大風(fēng)速Ve50和Ve1作為高度z的函數(shù),應(yīng)采用公式(1)、公式(2)進行計算:

在穩(wěn)態(tài)極端風(fēng)速模型中,允許短時間內(nèi)與平均風(fēng)向有一定的偏離,應(yīng)假定恒定的偏航誤差在±15°范圍內(nèi)。
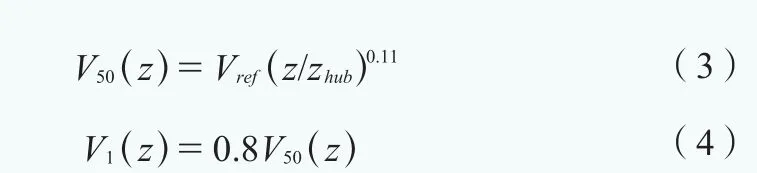
對于湍流極端風(fēng)速模型,50年和1年一遇的10min平均風(fēng)速是高度z的函數(shù),應(yīng)采用公式(3)、公式(4)進行計算。
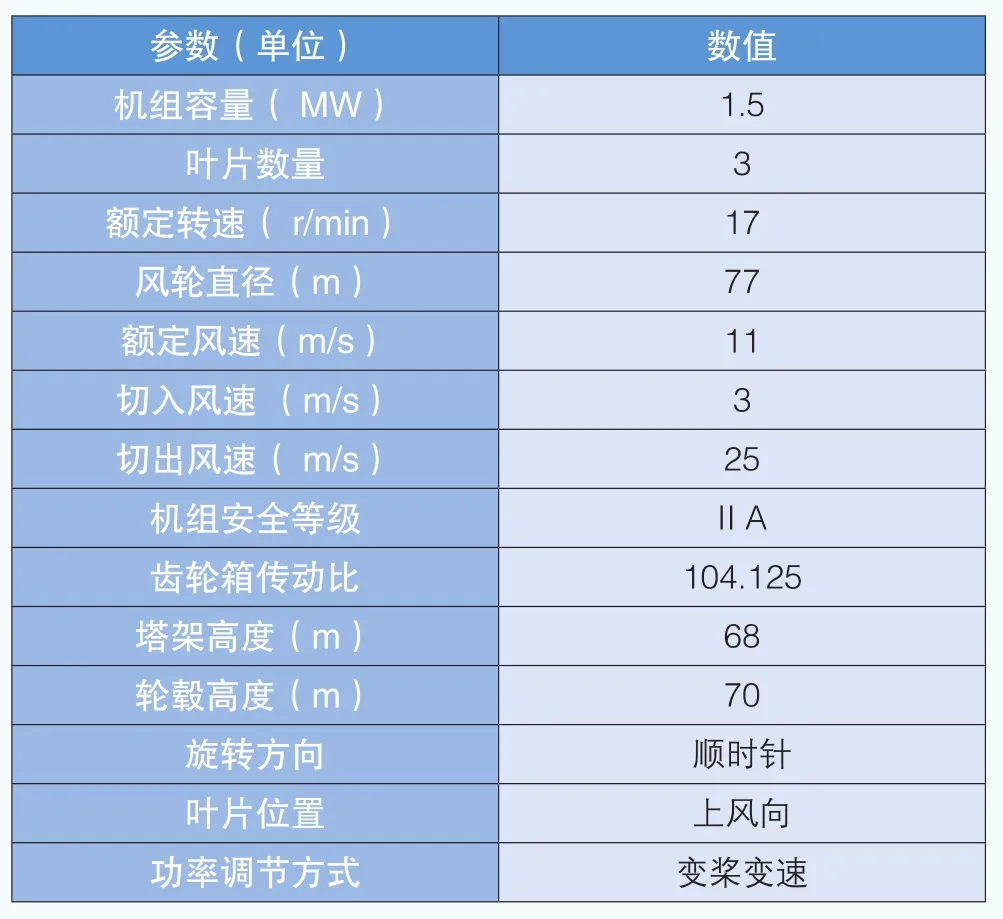
表1 風(fēng)電機組模型參數(shù)
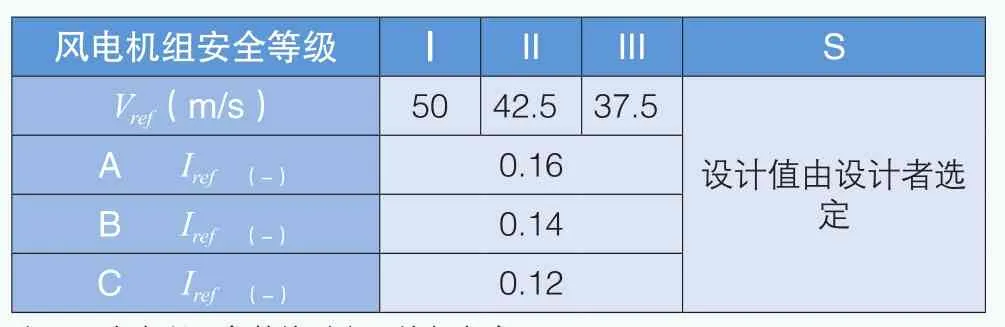
表2 風(fēng)電機組安全等級基本參數(shù)
縱向湍流標(biāo)準(zhǔn)偏差為:

二、正常湍流模型(NTM)
對于正常湍流模型,輪轂高度處風(fēng)速的湍流標(biāo)準(zhǔn)偏差的代表值σ1應(yīng)由該風(fēng)速下湍流標(biāo)準(zhǔn)偏差分布的90%分位數(shù)確定。對于標(biāo)準(zhǔn)風(fēng)電機組等級,σ1采用公式(6)進行計算:

計算模型
在停機工況下,運用Kaimal和Mann湍流譜密度模型,分別對靜止和空轉(zhuǎn)兩種狀態(tài)的風(fēng)電機組進行載荷計算,對計算結(jié)果進行分析對比,得出結(jié)論。
Bladed湍流風(fēng)模型采用三種模型進行仿真,分別是Von Karman、Kaimal以及Mann模型。目前風(fēng)電機組設(shè)計要求IEC標(biāo)準(zhǔn)規(guī)定采用Kaimal譜和Mann均勻切變湍流模型,停止使用Von Karman湍流模型。同時研究文獻中表明,應(yīng)用Kaimal和Mann模型計算出的極限載荷和等效疲勞載荷相對于Von Karman更為保守。基于此,本文采用Kaimal和Mann湍流風(fēng)模型進行仿真計算。
一、Mann均勻切變湍流模型
Mann湍流譜密度模型定義了一個三維速度譜張量,與Von Karman模型稍微不同,假設(shè)該模型產(chǎn)生的隨機速度場以輪轂高度風(fēng)速流過風(fēng)電機組,某一點的速度分量譜可對譜張量進行積分計算,那么無量綱的單面譜公式為:
式中,f代表頻率,Hz;Si代表單邊速度分量譜;下標(biāo)i代表速度分量方向,1為縱向,2為橫向,3為豎向;、l分別代表無切變、各向同性方差和尺度參數(shù);當(dāng)i=j(luò)時,Ψij是一維的波數(shù)自譜密度;當(dāng)i≠j且分量方差為公式(9)時,Ψij為正交譜;Vhub表示輪轂高度處的風(fēng)速,下標(biāo)hub表示輪轂高度處的位置。

同樣,對于垂直于縱向的多個空間分離點,相關(guān)函數(shù)為:
式中,Φij(k1,k2,k3)是三維無量綱速度譜張量;k1,k2,k3是3個分量方向的無量綱空間波數(shù);δ2,δ3為無量綱空間分離的矢量分量。
二、Kaimal譜和指數(shù)相干模型
Kaimal譜和指數(shù)相干模型同樣定義了一個三維速度譜張量,模型中湍流分量方差率以及豎向速度分量的方程形式與Mann均勻切變湍流模型略有不同,Kaimal分量功率譜密度無量綱形式為:

式中,f代表頻率,Hz;Sk代表單邊速度分量譜;下標(biāo)k代表速度分量方向,1為縱向,2為橫向,3為豎向;Lk代表速度分量積分尺度參數(shù);σk代表速度分量標(biāo)準(zhǔn)偏差,其表達式為:
式中,σ1和Λ1分別是湍流標(biāo)準(zhǔn)偏差和尺度參數(shù)。無量綱互譜相干模型為:

式中,r代表兩點之間分離矢量在垂直于平均風(fēng)向平面上的投影值;f代表頻率,Hz;Lc代表相干尺度參數(shù),取8.1Λ1(Λ1為尺度參數(shù))。
Kaimal與Mann模型的相關(guān)參數(shù)如表3、表4所示。
停機工況下的設(shè)計載荷狀態(tài)如表5所示,在DLC6.1、DLC6.2和DLC6.3設(shè)計狀態(tài)下,采用極端風(fēng)速模型;在DLC6.4設(shè)計狀態(tài)下,采用正常湍流模型。
計算結(jié)果與分析
在進行停機工況的載荷設(shè)計時,若設(shè)計載荷偏小,在風(fēng)電機組的實際運行中可能發(fā)生超載現(xiàn)象。在風(fēng)電機組實際運行過程中,對風(fēng)電機組進行載荷設(shè)計時,應(yīng)采取較大的載荷計算結(jié)果,這樣才能保證機組在實際條件下更加安全可靠的運行,預(yù)防飛輪、倒塔等事故的發(fā)生。
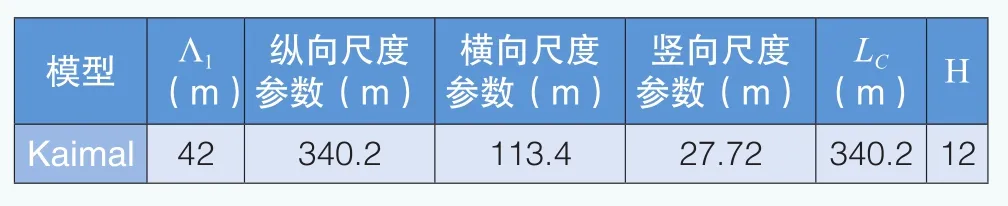
表3 Kaimal模型相關(guān)參數(shù)

表4 Mann模型相關(guān)參數(shù)

表5 停機工況設(shè)計載荷狀態(tài)
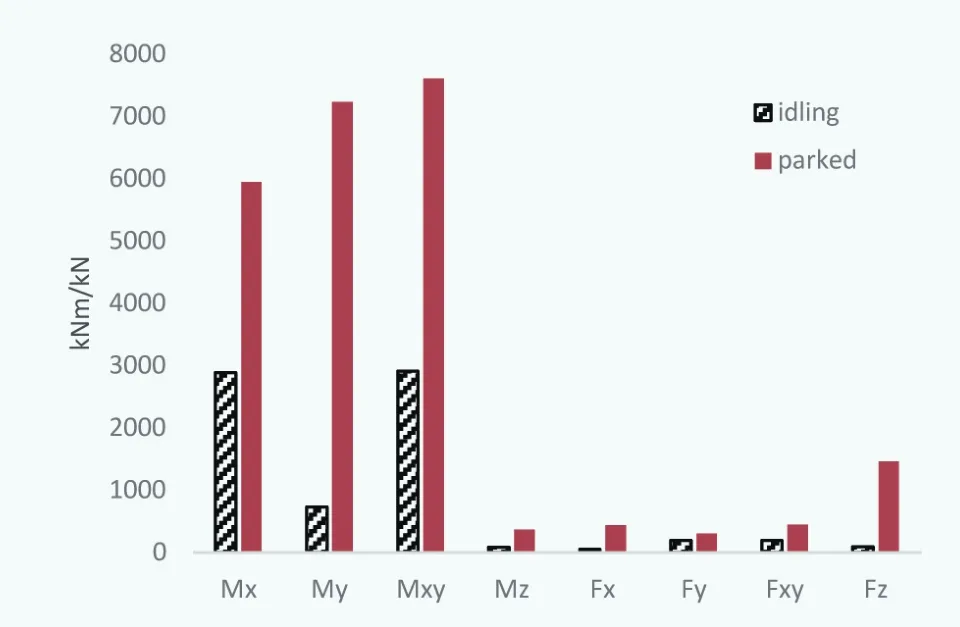
圖1 葉片根部極限載荷分量對比 (Kaimal模型)
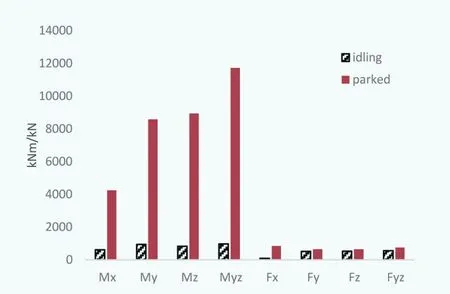
圖2 旋轉(zhuǎn)輪轂極限載荷分量對比(Kaimal模型)
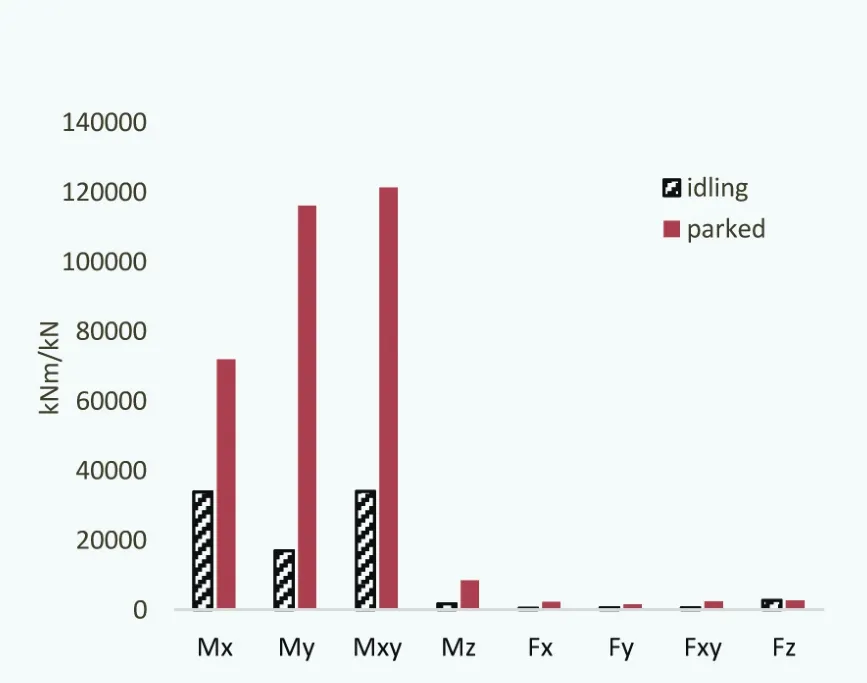
圖3 塔架底部極限載荷分量對比(Kaimal模型)
一、極限載荷對比分析
在Kaimal與Mann風(fēng)湍流模型下,通過對風(fēng)電機組關(guān)鍵位置處的的極限載荷計算,比較兩種模型下風(fēng)電機組關(guān)鍵位置處極限載荷的要求情況并加以分析。
(一)Kaimal模型停機工況極限載荷計算結(jié)果
在停機工況下,采用Kaimal模型對風(fēng)電機組葉片、輪轂、塔架等關(guān)鍵部位進行極限載荷計算,得出靜止和空轉(zhuǎn)狀態(tài)下的極限載荷分量計算結(jié)果,如圖1-圖3所示。在葉片根部、輪轂和塔架底部位置,靜止?fàn)顟B(tài)下的極限載荷分量明顯大于空轉(zhuǎn)狀態(tài)。
通過圖1可以看出,在葉片根部,靜止和空轉(zhuǎn)狀態(tài)極限載荷分量相差最小的為Fy,相差率(兩種狀態(tài)下同一極限載荷分量的差值與較小值之比)為60%;兩者極限載荷分量相差最大的為Fz,差值高于一個數(shù)量級。這是由于在空轉(zhuǎn)狀態(tài)下,極端風(fēng)況的風(fēng)載荷,一部分由葉片自身承受,一部分轉(zhuǎn)化為風(fēng)輪旋轉(zhuǎn)的動能;在靜止?fàn)顟B(tài)下,風(fēng)載荷全部由葉片自身承受,極限載荷分量較大。
通過圖2可以看出,在輪轂位置處,靜止?fàn)顟B(tài)下的極限載荷分量Mz、Myz比空轉(zhuǎn)狀態(tài)下大一個數(shù)量級。產(chǎn)生這種現(xiàn)象的原因與葉根相似,由于在空轉(zhuǎn)狀態(tài)下,極端風(fēng)況的風(fēng)載荷,一部分由輪轂自身承受,一部分轉(zhuǎn)化為旋轉(zhuǎn)的動能;在靜止?fàn)顟B(tài)下,風(fēng)載荷全部由輪轂部分承受,極限載荷分量較大。
通過圖3可以看出,在塔架底部的極限載荷分量中,兩種狀態(tài)下的Fz相差較小,其他極限載荷分量靜止?fàn)顟B(tài)均比空轉(zhuǎn)狀態(tài)大且差別明顯,兩種狀態(tài)下的My相差最大,該分量下靜止?fàn)顟B(tài)為空轉(zhuǎn)狀態(tài)的8倍。極限載荷分量Fz是由于在塔架坐標(biāo)系中,z方向為垂直方向,塔架底部在z方向承受的力Fz是風(fēng)電機組機艙以及塔架的重力,該力幾乎不受風(fēng)載荷的影響,因此極限載荷分量Fz相差很小。而在其他載荷分量處相差較大,是由于塔架底部承受的是機艙、葉片及塔架本身的力。在靜止?fàn)顟B(tài)下,葉片、輪轂等重要部件受力大于空轉(zhuǎn)狀態(tài),因此,塔架底部在靜止?fàn)顟B(tài)下受力同樣大于空轉(zhuǎn)狀態(tài)。
綜上所述,在Kaimal模型停機工況下,在空轉(zhuǎn)狀態(tài)下計算得出的極限載荷分量相對較小,在靜止?fàn)顟B(tài)下計算得出的極限載荷分量較大。因此,在采用Kaimal模型時,停機工況下應(yīng)根據(jù)靜止?fàn)顟B(tài)的極限載荷計算結(jié)果,進行機組極限載荷設(shè)計。
(二)Mann模型停機工況極限載荷計算結(jié)果
在停機工況下,采用Mann模型對風(fēng)電機組葉片、輪轂、塔架等關(guān)鍵部位進行極限載荷計算,得出靜止和空轉(zhuǎn)狀態(tài)下的極限載荷分量計算結(jié)果,如圖4-圖6所示。在停機工況下,在葉片根部、輪轂和塔架底部位置,靜止?fàn)顟B(tài)下的極限載荷分量同樣大于空轉(zhuǎn)狀態(tài)下的極限載荷分量。與Kaimal模型相比,Mann模型下空轉(zhuǎn)與靜止?fàn)顟B(tài)時的極限載荷分量差距較小,其極限載荷分量差值小于一個數(shù)量級,這是由于Kaimal模型與Mann模型設(shè)置的參數(shù)不同。
通過圖4可以看出,在葉根位置,靜止與空轉(zhuǎn)狀態(tài)下的極限載荷分量Fy差距較小。這是由于在葉片坐標(biāo)系中,y方向垂直于風(fēng)速方向,受風(fēng)載荷的影響較小,因此兩種狀態(tài)下的極限載荷分量Fy差別不大。這種情況在Kaimal模型中的葉根極限載荷分量Fy中也有體現(xiàn),產(chǎn)生這種情況的原因與Mann模型相同。
通過圖5、圖6可以看出,在輪轂和塔架底部位置處,Mann模型在靜止和空轉(zhuǎn)狀態(tài)下的極限載荷分量分布與Kaimal模型相似。
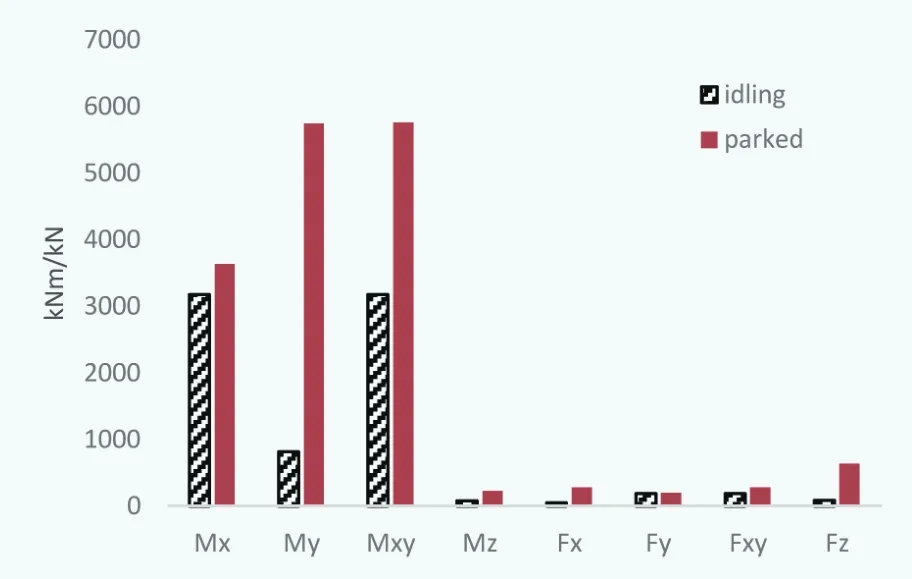
圖4 葉片根部極限載荷分量對比(Mann模型)
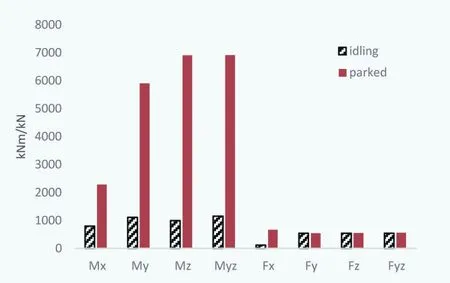
圖5 旋轉(zhuǎn)輪轂極限載荷分量對比(Mann模型)
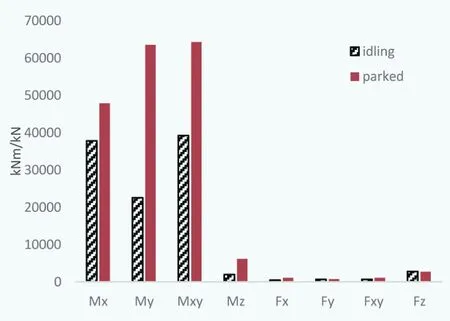
圖6 塔架底部極限載荷分量對比(Mann模型)
綜上所述,在Mann模型停機工況下,按照IEC2005標(biāo)準(zhǔn)得出的極限載荷計算對比結(jié)果與Kaimal模型相同,即在空轉(zhuǎn)狀態(tài)下的極限載荷分量較小,在靜止?fàn)顟B(tài)下的極限載
荷分量較大。因此,得出與Kaimal模型一致的結(jié)論,停機工況下應(yīng)根據(jù)靜止?fàn)顟B(tài)的極限載荷計算結(jié)果,進行機組極限載荷設(shè)計。
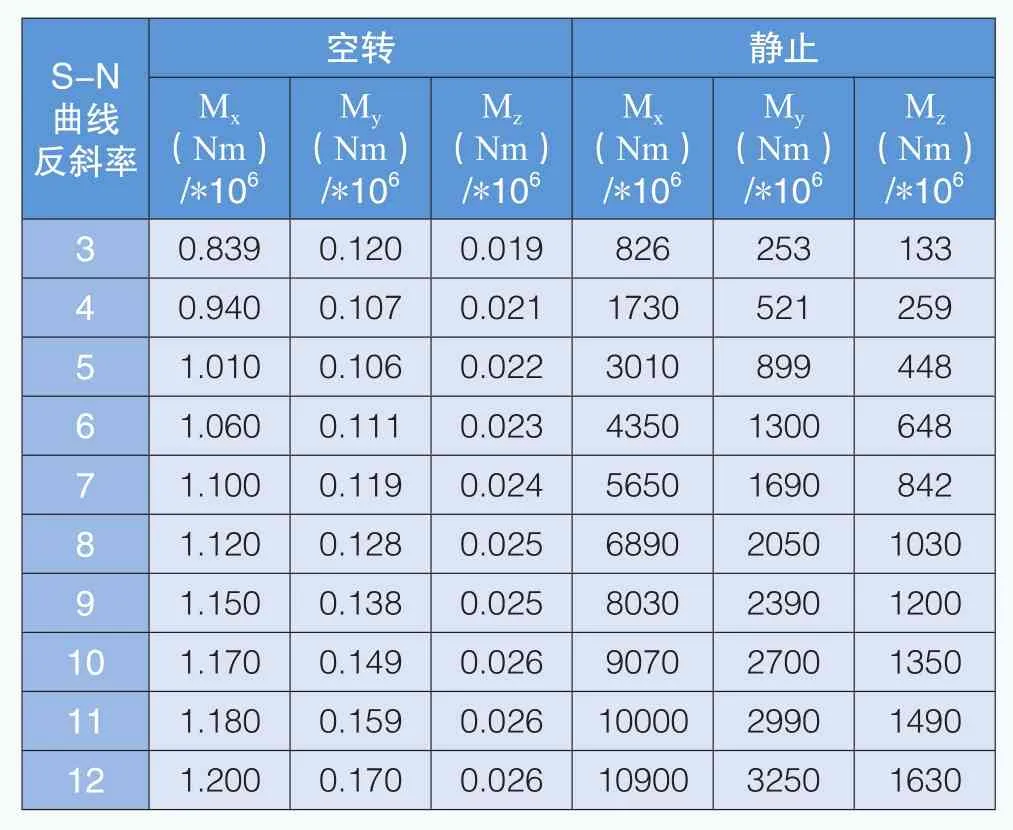
表6 葉片根部載荷分量對比(Kaimal模型)

表7 旋轉(zhuǎn)輪轂載荷分量對比(Kaimal模型)
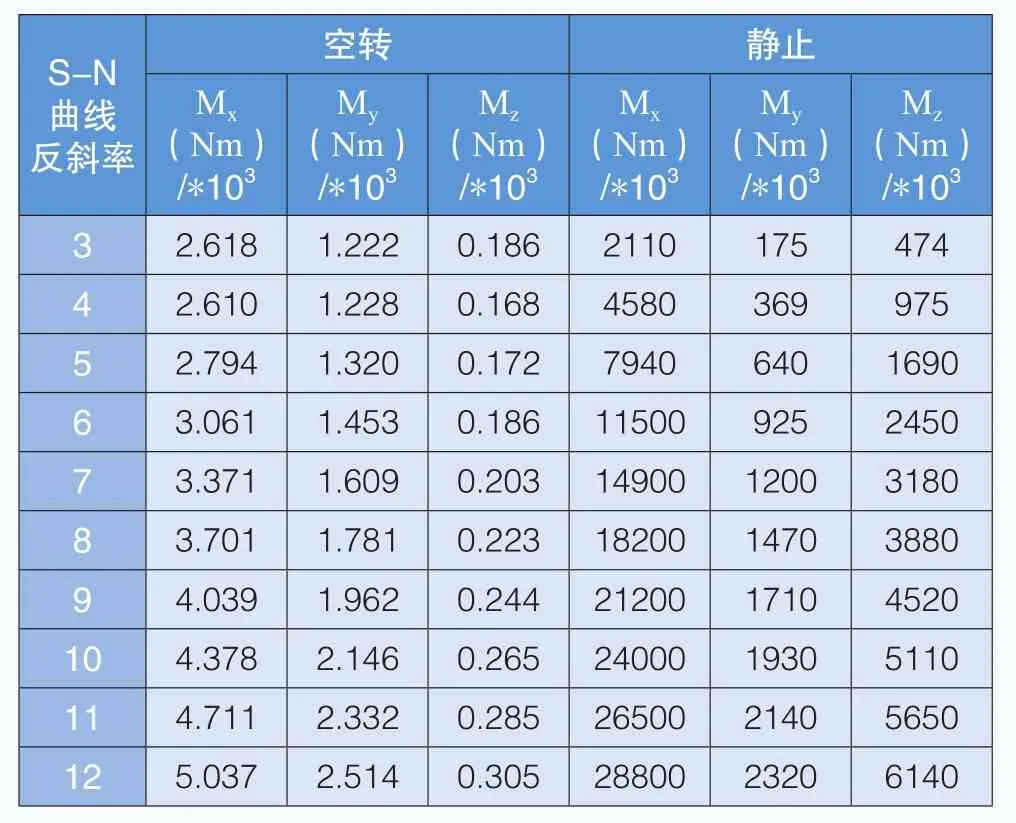
表8 塔架底部載荷分量對比(Kaimal模型)
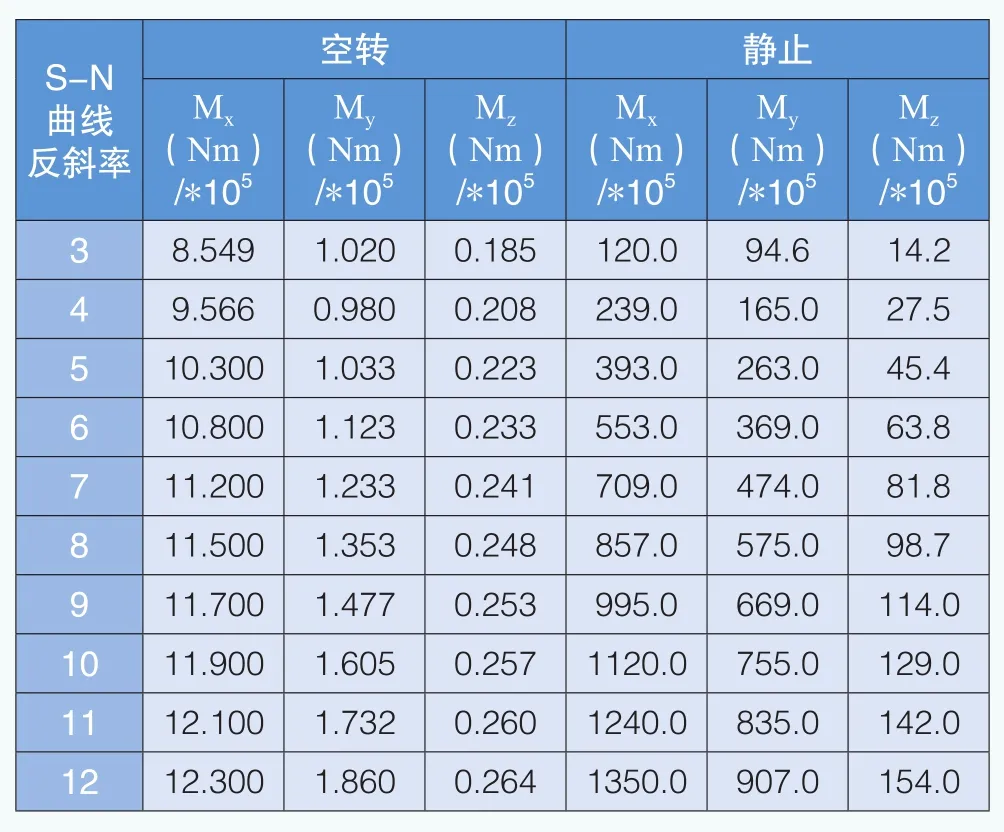
表9 葉片根部載荷分量對比(Mann模型)
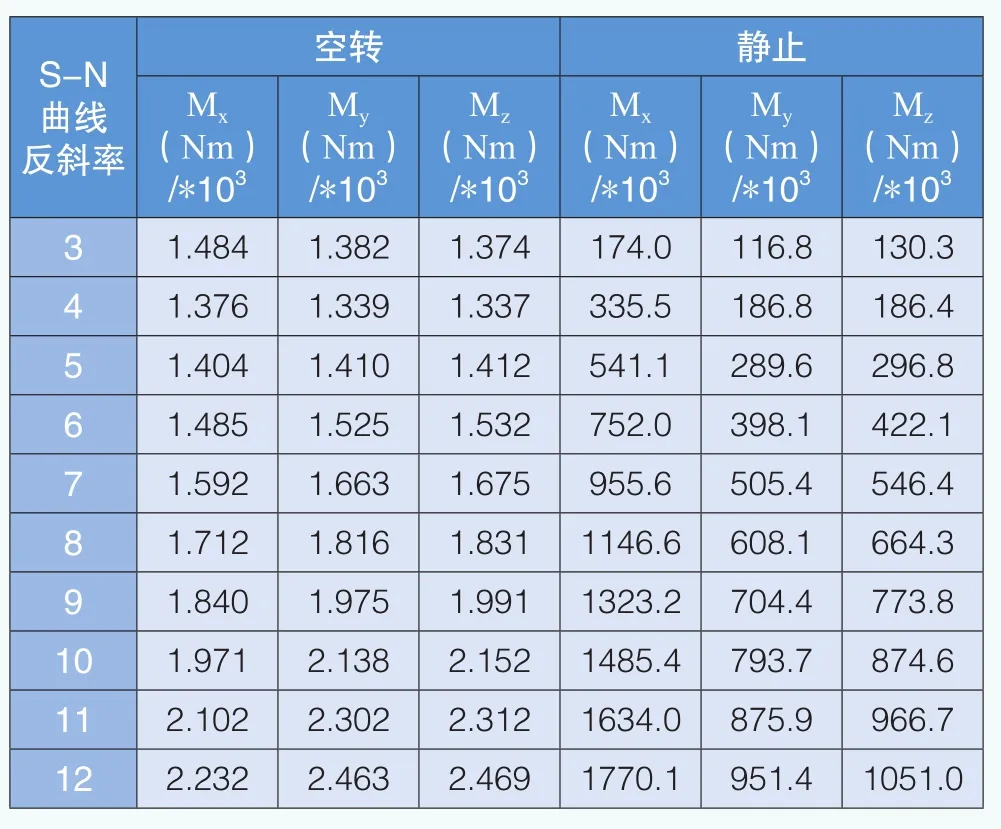
表10 旋轉(zhuǎn)輪轂載荷分量對比(Mann模型)

表11 塔架底部載荷分量對比(Mann模型)
(三)停機工況極限載荷設(shè)計選取
根據(jù)Kaimal模型和Mann模型極限載荷計算結(jié)果的對比分析,得出結(jié)論:在停機工況下,在葉片根部、輪轂和塔架底部位置,采用靜止?fàn)顟B(tài)計算得出的極限載荷分量較大,采用空轉(zhuǎn)狀態(tài)計算得出的極限載荷分量較小。因此,考慮到實際環(huán)境中的運行情況,應(yīng)以靜止?fàn)顟B(tài)下的極限載荷計算結(jié)果為依據(jù)進行極限載荷設(shè)計。
二、疲勞載荷對比分析
在Kaimal與Mann風(fēng)湍流模型下,通過對風(fēng)電機組關(guān)鍵位置處的等效疲勞載荷計算,比較兩種模型下風(fēng)電機組關(guān)鍵位置處等效疲勞載荷的要求情況并加以分析。
S-N曲線為疲勞壽命曲線,疲勞壽命是疲勞失效時所經(jīng)受的應(yīng)力或應(yīng)變的循環(huán)次數(shù)。不同的S-N曲線反斜率,如表中所示(數(shù)字3到12)分別代表風(fēng)電機組不同部件所用的材料。
(一)Kaimal模型停機工況疲勞載荷計算結(jié)果
在停機工況下,采用Kaimal模型、應(yīng)用雨流計數(shù)統(tǒng)計對風(fēng)電機組葉片、輪轂、塔架等關(guān)鍵部位進行疲勞載荷計算,得出靜止和空轉(zhuǎn)狀態(tài)下的等效疲勞載荷,如表6-表8所示。在葉片根部、輪轂和塔架底部位置,靜止和空轉(zhuǎn)狀態(tài)下的彎矩等效疲勞載荷差距較大。
在Kaimal模型下,二者最小的差距出現(xiàn)在表7, 即旋轉(zhuǎn)輪轂與固定輪轂的S-N曲線反斜率為3的位置,Mx相差454倍;最大的差距出現(xiàn)在表6, 即葉片根部的S-N曲線反斜率為12的位置,Mz相差62692倍。
綜上所述,在Kaimal模型停機工況下,采用靜止?fàn)顟B(tài)計算出的等效疲勞載荷遠遠大于空轉(zhuǎn)狀態(tài)。因此,停機工況下根據(jù)靜止?fàn)顟B(tài)的等效疲勞載荷計算結(jié)果,機組安全性更高。
(二)Mann模型停機工況疲勞載荷計算結(jié)果
在停機工況下,采用Mann模型、應(yīng)用雨流計數(shù)統(tǒng)計對風(fēng)電機組葉片、輪轂、塔架等關(guān)鍵部位進行疲勞載荷計算,得出靜止和空轉(zhuǎn)狀態(tài)下的等效疲勞載荷,如表9-表11所示。在葉片根部、輪轂和塔架底部位置,靜止和空轉(zhuǎn)狀態(tài)下的彎矩等效疲勞載荷差距也較大,但與Kaimal模型相比,差距相對較小。
在Mann模型下,二者最小的差距出現(xiàn)在表11,即塔架底部載荷S-N曲線反斜率為3的位置,Mx相差7倍;二者最大的差距出現(xiàn)在表10,即旋轉(zhuǎn)輪轂載荷S-N曲線反斜率為12的位置,Mx相差793倍。
綜上所述,在Mann模型停機工況下,靜止?fàn)顟B(tài)所計算出的等效疲勞載荷遠遠大于空轉(zhuǎn)狀態(tài)。因此,為保證風(fēng)電機組的載荷設(shè)計更加安全可靠,停機工況下應(yīng)根據(jù)靜止?fàn)顟B(tài)的等效疲勞載荷計算結(jié)果。
(三)停機工況疲勞載荷設(shè)計選取
根據(jù)Kaimal模型和Mann模型等效疲勞載荷計算結(jié)果的對比分析,得出結(jié)論:在停機工況下,在葉片根部、輪轂和塔架底部位置,采用靜止?fàn)顟B(tài)計算得出的等效疲勞載荷遠遠大于空轉(zhuǎn)狀態(tài)計算得出的等效疲勞載荷。因此,考慮到實際環(huán)境中的運行情況,應(yīng)以靜止?fàn)顟B(tài)下的等效疲勞載荷計算結(jié)果為依據(jù)進行疲勞載荷設(shè)計。
結(jié)論
基于IEC2005標(biāo)準(zhǔn),以1.5MW雙饋異步風(fēng)電機組為研究對象,在停機工況下分別采用Kaimal和Mann湍流譜密度模型,對靜止?fàn)顟B(tài)和空轉(zhuǎn)狀態(tài)下的風(fēng)電機組進行載荷計算。根據(jù)Kaimal和Mann模型下兩種狀態(tài)的極限載荷和等效疲勞載荷計算結(jié)果,依據(jù)風(fēng)電機組設(shè)計載荷選取原則,判斷應(yīng)以哪一種狀態(tài)的載荷結(jié)果作為停機工況下的載荷設(shè)計依據(jù),增強機組在極端風(fēng)況下的抗破壞能力,提高機組的設(shè)計可靠性。得出結(jié)論如下:
(1)在停機工況Kaimal模型和Mann模型下,在風(fēng)電機組葉片、輪轂、塔架等關(guān)鍵位置,采用靜止?fàn)顟B(tài)計算得出的極限載荷分量均比空轉(zhuǎn)狀態(tài)大,最大相差一個數(shù)量級,所以應(yīng)以靜止?fàn)顟B(tài)下的極限載荷計算結(jié)果為依據(jù)進行極限載荷設(shè)計。
(2)在停機工況Kaimal模型和Mann模型下,在風(fēng)電機組葉片、輪轂、塔架等關(guān)鍵位置,采用靜止?fàn)顟B(tài)計算得出的等效疲勞載荷遠遠大于空轉(zhuǎn)狀態(tài),最大的差距為62692倍,所以應(yīng)以靜止?fàn)顟B(tài)下的等效疲勞載荷計算結(jié)果為依據(jù)進行疲勞載荷設(shè)計。
(3)在停機工況Kaimal模型和Mann模型下,在風(fēng)電機組關(guān)鍵位置,采用靜止?fàn)顟B(tài)計算得出的極限載荷和等效疲勞載荷均大于空轉(zhuǎn)狀態(tài)。綜合考慮極限載荷和等效疲勞載荷,在進行停機工況的載荷設(shè)計時,應(yīng)以靜止?fàn)顟B(tài)的載荷計算結(jié)果為依據(jù)。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19