臍橙采摘機器人末端執行器設計與試驗
2018-07-19 15:23:48徐麗明劉旭東張凱良邢潔潔袁全春陳俊威段壯壯于暢暢
農業工程學報 2018年12期
關鍵詞:設計
徐麗明,劉旭東,張凱良,邢潔潔,袁全春,陳俊威,段壯壯,馬 帥,于暢暢
(中國農業大學工學院,北京 100083)
0 引 言
臍橙營養豐富,具有很高的食用、藥用價值,廣受大家的喜愛。根據贛州市果業局統計,截止到2016年底贛南市臍橙種植面積33.33萬hm2,總產量300萬t,是全世界種植面積最大,全國第一的臍橙產區[1]。隨著臍橙種植面積和產量的增加,贛南臍橙已經發展成為集種植生產、倉儲物流、精深加工于一體的產業集群,臍橙無損采摘向機械化、智能化發展是必然趨勢。而末端執行器作為采摘機器人的重要裝置之一,其工作效率直接影響到采摘作業的成功率、速度和損傷率[2]。
國外對于果蔬采摘機器人末端執行的研究起步較早,研究領域較廣[3-6]。其中,Bac等[7]設計了一種甜椒采摘末端執行器,采用真空吸盤吸附與氣動唇形切刀切割果梗相結合的采摘方式;Silwal等[8]設計了一種蘋果采摘末端執行器,采用繩驅動3指包絡夾持果實的采摘方式;而國內對于果蔬采摘末端執行器的研究相對較晚[9],近年來發展較快,在黃瓜、草莓以及番茄等[10-14]領域都取得一定的進展,傅隆生等[15]設計了一種獼猴桃采摘末端執行器,采用3個電機驅動機構(吸附、夾持、旋轉分離)的采摘方式,單果采摘時間為22 s,采摘速度較低;葉敏等[16]設計了一種荔枝采摘末端執行器,采用擬人指夾持果梗并結合旋轉切刀切割果梗的方式,不適合類球簇生型果蔬的采摘;張水波[17]設計了一種柑橘采摘末端執行器,采用氣動柔性三指抓握與氣動馬達驅動割刀切割果梗的采摘方式,結構尺寸較大。國內學者設計的末端執行器控制系統普遍是基于單片機獨立開發設計,與機械臂的集成度較低。
由于臍橙的生長特性和生物特性與其他果蔬具有一定的差異性,現有設計方案無法直接運用。因此,本文在臍橙生物力學特性與靜力學分析的基礎上,利用氣動機構速度快、電動機構精度高的特點,設計一種采摘速度高、控制難度低、與機械臂集成度高的臍橙采摘末端執行器。研制試驗樣機進行臍橙采摘試驗,驗證機構的合理性,以期為后期臍橙采摘機器人的整體設計提供技術支持。
1 末端執行器的機構組成與工作原理
所設計的末端執行器主要由機械部分、控制系統和視覺系統組成,本文主要進行機械部分和控制系統的研究設計,視覺系統采用現有的研究技術。
1.1 末端執行器的機構組成
如圖1所示,末端執行器主要包括:與自主設計的機械臂相連接的連接架、吸附機構、夾持機構、旋切機構等,以及搭載的視覺系統(不涉及其研究開發),其中夾持機構是關鍵機構。
吸附機構主要由下氣缸(型號XC10×60)、真空吸盤(型號ZP25DS)、吸盤支座等部分組成。旋切機構主要由上氣缸(型號TD10×40)、鋸齒圓盤切刀、切刀護罩、切刀連接架、強磁高速直流電機(型號RS550,24 V)等部分組成。由于末端執行器手指的自由度越多,抓取動作越為靈活,抓取效果也越好,但其系統的復雜程度、成本和控制難度也都會因此而增加[18]。因此,本文基于欠驅動原理,采用兩指式夾持機構,以一個電機作為動力輸出即可,此機構由V型手指、緩沖材料(硅膠)、電阻式薄膜壓力傳感器(型號FSR402,量程10 kg,精度±5%~±25%)、提供動力的步進電機(型號42HS4817A4,靜力矩0.52 N?M,步距角1.8°)、連接電機軸和滾珠絲杠的梅花聯軸器(BF系列)、將轉矩轉化為推力的滾珠絲杠機構(型號SFU1204-3)、安裝于絲杠螺母上的螺母座、連接手指底座和螺母座的連桿、導向軸等部分組成。

圖1 末端執行器結構圖Fig.1 Structure diagram of end-effector
1.2 工作原理
臍橙采摘流程如圖2所示,視覺系統不斷獲取目標果實和果梗的位姿,機械臂進行位姿調整,定位完成后末端執行器開始工作。為了避免果簇中其它果實對采摘作業的干擾以及末端執行器對果簇的損傷,除了需要機械臂的避障和軌跡規劃之外,還需要末端執行器進一步將臍橙單果從果簇中分離。本文利用下氣缸推動真空吸盤作為吸附機構接近并吸附果實,下氣缸推桿復位后,果實可被吸盤拉拽遠離果簇且果梗位于2個V型手指所在的中心平面。之后,夾持機構開始工作,步進電機驅動滾珠絲杠帶動螺母座(滑塊)向前移動,從而推動連桿拉動安裝于手指底座(曲柄)上的2個V型手指對果實進行包絡夾持,當手指表面的電阻式薄膜壓力傳感器所受正壓力達到設定的安全閾值之后,步進電機停止轉動同時吸盤關閉。然后,旋切機構開始工作,上氣缸推桿推動由強磁高速直流電機驅動的高速旋轉的切刀實現對果梗的旋切,果實與果梗的分離后,上氣缸推桿復位同時強磁高速直流電機停止工作。最后,末端執行器夾持臍橙跟隨機械臂運動到果實收集區,夾持機構復位卸果從而完成單果采摘作業。

圖2 臍橙采摘流程圖Fig.2 Flow diagram of navel orange picking
2 臍橙受力分析與夾持機構設計
2.1 臍橙數學模型與采摘手指工作空間
贛南臍橙標準[19]中,三級果到特級果的橫徑范圍為60~95 mm。而實際調研數據顯示,果實最大外形尺寸(r×c)為109.38 mm×102.45 mm,最小外形尺寸(r×c)為51.36 mm×51 mm,有部分果實橫徑不滿足級數標準要求,故本文將橫徑超過標準規定范圍的果實定義為畸形果。由于畸形果數量較少,本文只考慮采摘橫徑范圍為50~100 mm的臍橙,其他特例不在本文考慮范圍中。
選取紐荷爾臍橙為研究對象,選取30個成熟果實對其形狀尺寸進行測量計算,得到臍橙果形指數(果實縱徑與橫徑的比值)為1~1.1。由此定義臍橙模型為標準長橢球體,果實表面任意一點的坐標(x,y,z)滿足方程(1)。

式中r為臍橙橫徑,mm;c為臍橙縱徑,mm。
以臍橙橫徑范圍為指標,以臍橙赤道面為基準進行夾持機構建模(圖3)。為保證手指指節內表面與可采橫徑范圍的任意臍橙在夾持時都有4個相切點,以保證4個傳感器都能實時反饋壓力值,本文利用CAD對手指相關參數進行模擬優化,最終得到理想參數:遠指指節長度l1為35 mm,近指指節長度l2為35 mm,兩者夾角θ為140°,手指底座長度l4為31 mm、連桿長度l5為60 mm。為防止手指指根與吸盤外徑干涉,取手指指根長度l3為38 mm。當手指底座(曲柄)處于水平極限位置時夾持范圍最小,此時夾持直徑Dmin為50 mm,當手指底座(曲柄)相對支點O的轉角δ為20°時,手指有效夾持范圍達到最大,此時夾持直徑Dmax為100 mm。為保證機構不存在死點同時減小機構的結構尺寸,本文采用對心式曲柄滑塊機構作為傳動機構[19],在轉動角0°≤δ<20°的范圍,若正壓力設計合理,可實現兩V型手指對臍橙的穩定包絡夾持。

圖3 手指關節尺寸及工作空間Fig.3 Size of finger joints and work space
2.2 臍橙受力分析
由于2個V型手指與臍橙赤道面共有4個接觸點,第i個接觸點的受力主要為正壓力Ni、豎直方向摩擦力fi、水平方向摩擦力fi'。另外,臍橙還受吸盤吸附時的支持力Nq,其主要受力分析如圖4所示。

圖4 臍橙數學模型與受力分析Fig.4 Mathematical model and stress analysis of navel orange
臍橙與手指的接觸類型為有摩擦的點接觸,當吸盤停止工作后吸附力消失,此時臍橙能被穩定夾持而不滑落的臨界條件為果實重力等于果實與手指之間的最大靜摩擦力[20],見式(2)。設最小正壓力為Nmin,其值應滿足式(3)。由于兩手指對臍橙的作用點和作用力是關于Z軸對稱,每個接觸點所受的正壓力Ni大小相等。在此條件下,要達到穩定夾持質量最大的果實,最小正壓力Nmin應滿足條件式(4)。

式中mmax為臍橙果實最大質量,kg;g為重力加速度,取9.8 m/s2;μ為臍橙果皮與緩沖材料的摩擦系數。
在V型手指上壓力傳感器表面粘貼一定的緩沖材料[9]可以增大摩擦系數,提高手指表面柔順度,進而可以減小所需輸出的正壓力,同時可以減小夾持過程中可能會產生的機械損傷,有利于實現柔順抓取。不同緩沖材料與臍橙果皮的摩擦系數不同,常見的緩沖材料有3種:橡膠、硅膠和珍珠棉,為確定其中最佳的緩沖材料。利用MXD-02摩擦系數儀對臍橙果皮與不同緩沖材料進行摩擦試驗,試驗速度為100 mm/min,每種摩擦材料分別在200和500 g的不同加載質量下進行5次重復試驗,然后對摩擦系數取平均值,得到平均摩擦系數表(表1)。由表可知:3種試驗材料中,硅膠與臍橙表皮的摩擦系數最大,故選硅膠作為緩沖材料,取μ為1.275。

表1 不同材料與臍橙表皮的平均靜摩擦系數Table 1 Average static friction coefficient of different materials and navel orange skin
為確定最小正壓力Nmin,需根據式(4)對不同橫徑果實測量質量,經測得,果實最大質量約為360 g。考慮到臍橙的變異性,取果實質量400 g,即增大11.11%的裕量系數進行計算,得到最小正壓力Nmin為0.77 N。另外,若正壓力過大會對臍橙造成生物組織破壞,因此需對臍橙進行壓縮試驗[21-28]以確定臍橙無損采摘的最大正壓力Nmax。本文取不同果形的臍橙10個,均分2組(每組5個),采用平板壓頭(45 mm×70 mm),分別以 100和200 mm/min的加載速度進行加載,得到載荷位移曲線如圖5所示。
由圖5可知,無論是相同加載速度還是不同加載速度,臍橙的生物屈服點都位于位移量為10~20 mm之間,且破裂點位于生物屈服點之后約10 mm處。在位移量小于5 mm時,其載荷/位移曲線成同一線性關系。因此,位移量5 mm處可視為彈性變形極限點,為了有效防止位移量過大出現生物組織損傷,同時減小輸出動力以降低能耗,本研究取最大位移量Dmax為5 mm,此時無損傷最大正壓力Nmax約為25.57 N。由以上分析可確立正壓力的范圍為0.77~25.57 N。

圖5 不同加載速度載荷位移曲線Fig.5 Displacement curves for different loading speed loads
在吸附機構與夾持機構同時作用于臍橙時,在赤道平面內對臍橙進行水平方向受力分析,如圖6所示,臍橙受到的外力有:第i個接觸點所受的正壓力Ni、相對于手指向外側移動而產生的摩擦力fi'和吸盤對其產生的支撐力Nq。根據力平衡原理、工作空間中設計的指節夾角θ(140°)、摩擦系數μ(1.275),并聯立式(6)~式(12),可得吸盤支撐力的Nq的計算方程式(13)。在此方程中Nq與N成正比例關系,因此,應取Nmax進行設計。
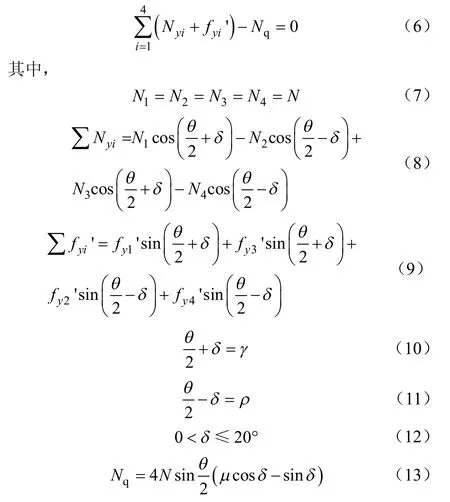
式中N為正壓力,N。Nyi為第i個接觸點所受的正壓力在y方向的分力,N;fyi'為第i個接觸點所受的靜摩擦力在y方向的分力,N;i=1,2,3,4。
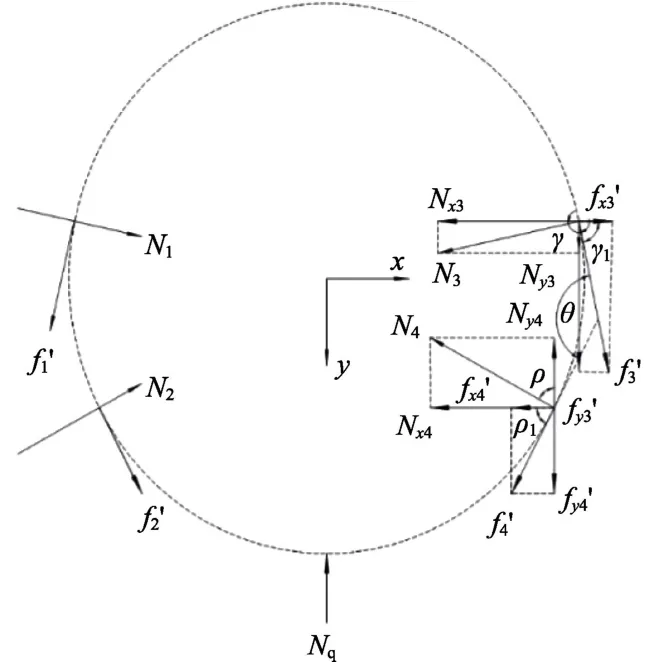
圖6 臍橙水平方向受力分析Fig.6 Horizontal force analysis of navel orange
在x方向的平衡力系為式(14),由于結構的對稱性,兩側手指的受力在水平方向x的分力始終對稱,即大小相等,方向相反。所以水平方向x上,合力Fx始終為0。

式中Nxi為第i個接觸點所受的正壓力在x方向的分力,N;fxi為第i個接觸點所受的摩擦力在x方向的分力,N;i=1,2,3,4。
2.3 夾持機構受力分析與關鍵部件選型
由于手指工作時速度較低,因此靜力學分析可具有代表性[29-33]。并且由于V型手指和曲柄滑塊機構是沿滾珠絲杠對稱布置,故取一側進行分析,如圖7所示,步進電機輸出轉矩通過滾珠絲杠轉化滑塊推力F,2個正壓力N3,N4的合力為Na,其作用線通過a點,由于N3,N4大小相等且關于a點對稱,合力矩Ma為0,則點a只受合力Na。假設曲柄滑塊機構為理想機構(即不考慮摩擦、慣性力、配合間隙和彈性變形)將手指機構所受力向O點簡化,根據合力矩平衡,見式(17),來推導所需推動力F的方程,見式(27)。

式中Mq為合力Na對O點的合力矩,N·m;Mp為推動力F對O點的合力矩,N·m。
其中,
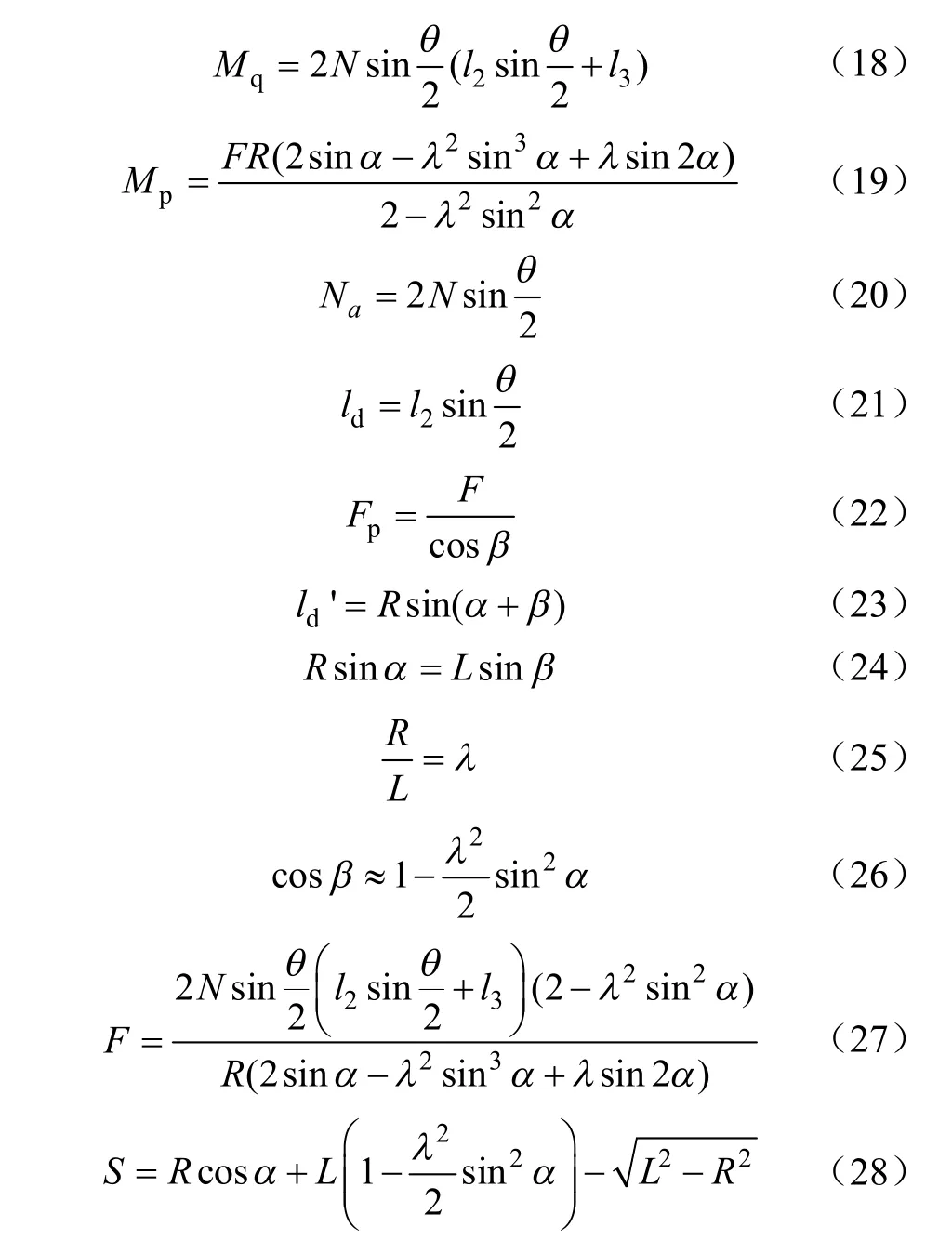
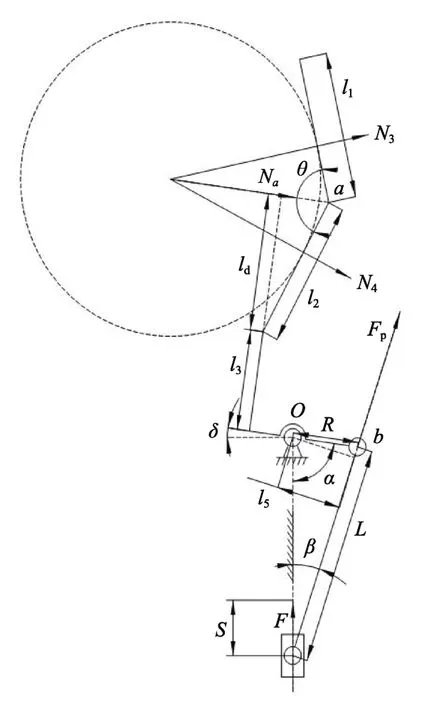
圖7 手指受力分析Fig.7 Force analysis of finger
式中R為點b到點O距離,mm;F為推動力,N;λ為連桿比;L為連桿長度,mm;α為機械手指底座(曲柄)與豎直方向的夾角,(°);β為連桿與豎直方向的夾角,(°);ld′為手指近指節長度l2在力臂方向的投影,mm;S為螺母座(滑塊)行程,mm。
其中l2、l3,θ,λ為已知設計參數,因此滑塊的推力F主要由角度參數α和正壓力N決定,其中,正壓力N依據最大正壓力Nmax設計。根據工作空間中運動角度參數70°≤α<90°,可計算出 222.15 N≤F≤227.97 N。根據式(28)推導計算滑塊行程S為5.38 mm,根據曲柄連桿機構的幾何關系可計算絲杠長度應大于63.47 mm,本研究對絲杠長度圓整取值為70 mm.
滾珠絲杠機構選用標準件SFU1204,絲杠的垂直方向無負載,根據式(29)進行設計選型(理想安裝,不考慮沖擊、震動以及其他非常因素影響),取傳動正效率為0.94,計算電機所需轉矩0.31 N?m。選用SUMTOR步進電機(型號42HS4817A4),額定轉矩為0.52 N?m,是計算轉矩的1.7倍,滿足要求。

式中T為電機轉矩,N?m;Fa為軸向載荷,大小為2F,N;I為絲杠導程,mm;n為進給絲杠的正效率。
3 控制系統設計
3.1 控制系統組成
本文控制系統的硬件[34-36]主要包括:嵌入式運動控制器(品牌為固高,型號 GUC-400-TPV-M23-L2-F4G)、I/O端子板(品牌為固高,型號GT-400-ACC2)、步進電機驅動器(品牌為SUMTOR,型號M415B)、模擬量轉換模塊(品牌為威科,型號FSR400系列)、脈沖發生器(品牌Makerbase,型號OSC)、24V電磁繼電器(品牌為Risym,型號SRD-24VDC-SL-C)、5V電磁繼電器(品牌為Risym,型號SRD-05VDC-SL-C)、電磁閥(品牌為KMTC,型號4V110-06,DC24V)、真空器(品牌為Convum,型號CV-10)、光電傳感器(品牌為Risym,型號FC-03)等組成,系統原理圖如圖8所示。上位機軟件采用VC++6.0中的MFC開發,下位機控制程序采用C語言開發。

圖8 臍橙采摘機器人末端執行器控制系統硬件原理圖Fig.8 Hardware structure of control system for end-effector of navel orange robotics picking
以嵌入式運動控制器作為主控制器,不僅可以實現末端執行器的實時控制運算,而且有效地實現了與機械臂控制系統的集成,利于之后機器人整體的開發。控制系統的工作原理如下:首先,主控制器通過I/O輸出低電平控制常開24 V電磁繼電器3吸合,電磁閥3通電工作,使得下氣缸推桿推出;之后,常開24 V電磁繼電器1通電吸合,電磁閥1通電工作使得真空器產生負壓,此時,系統延時以保證穩定吸附果實;之后,常開24 V電磁繼電器3斷電,下氣缸推桿復位,吸附動作完成。吸附動作完成之后,夾持動作開始,I/O端口控制脈沖發生器給驅動器輸入脈沖信號實現步進電機的正轉,夾持過程中V型手指的壓力傳感器反饋的電壓不斷升高,其值通過模擬量輸入端口反饋到主控制器,與設定的安全閾值不斷進行比較,當超過安全閾值后,脈沖發生器停止輸出脈沖信號,且常開24 V電磁繼電器1斷電,真空器關閉。最后,旋切動作開始,常開24 V電磁繼電器4吸合,強磁高速直流電機以10 000 r/min的轉速對果梗進行高速旋切,在旋切過程中,系統延時以保證果梗順利剪切,延時完成之后,常開24 V電磁繼電器4斷電,電機停止工作;之后,常開24 V電磁繼電器2斷電,實現上氣缸復位。最后,機械臂到達卸果區,控制器控制末端執行器開始卸果動作,驅動器方向信號變化,電機反轉,光電傳感器檢測到信號之后,電機停止反轉,完成復位的同時實現卸果動作。
3.2 正壓力閾值與氣缸速度確定
本文采用的電阻式薄膜壓力傳感器,通過壓力的變化控制阻值變化從而實現輸出電壓的的變化,推導壓力與電壓之間的函數關系式為式(30),電源供電電壓Vcc設定為5 V,壓力依據最大的接觸力為25.57 N,輸出電壓最大應小于4.45 V。因此嵌入式運動控制器的模擬電壓輸入的采樣反饋電壓最大為4.45 V。
式中V0為輸出電壓,V;Vcc為電源電壓,V。
理論上,提高氣缸推桿速度可以減小吸附和旋切2個動作的耗時,因此氣缸推桿速度越快越好。但試驗中發現,下氣缸推桿速度過快時,吸盤會撞走果實而未與果實充分接觸,且復位速度過快會造成果實與吸盤脫落,吸附失敗。上氣缸推桿推出速度過快時,果梗會被刀片嚴重頂斜。為了在提高機構的采摘速度的同時避免上述現象的產生,本文通過調節氣缸閥門控制下氣缸推桿的速度為240 mm/s時(伸出速度和復位速度相同),吸附效果最優。上氣缸推桿推出速度為80 mm/s,而復位速度400 mm/s,效果最優。
4 采摘試驗
本試驗于2017年10月于江西省吉安市井岡山農業科技園進行,搭建末端執行器實體樣機安裝于自主設計的機械臂上,采摘試驗如圖9所示。由于本文不涉及視覺系統的研究,假設果實的位姿信息已知:將果實的中心點和果梗與手抓中心面(2個V型手指的中心對稱面)布置在同一平面內,果梗距離吸盤55 mm。然后通過上位機軟件控制末端執行器進行采摘試驗。
夾持機構是末端執行器的關鍵機構,步進電機轉速對夾持機構的工作效果影響很大,經預試驗發現:當步進電機轉速超過300 r/min時,夾持機構對果實的慣性沖擊較大,系統穩定性較差,容易造成采摘失敗,且會損傷果實;在50~300 r/min時系統都具有較好的穩定性,且可以實現無損采摘,其中無損采摘的定義為:在末端執行器的吸附果實、穩定夾持、果梗剪切、卸果復位的整個過程中果實表面未與除硅膠之外的末端執行器的任何部位發生接觸。
本文以步進電機轉速為因素,以單果采摘時間、采摘成功率和損傷率為指標進行試驗。選步進電機轉速的試驗范圍為200~300 r/min,以橫徑范圍為60~95 mm的成熟臍橙作為試驗樣本,橫徑梯度5 mm,每個梯度5個樣本,共計105個。統計其單果采摘時間、采摘成功率和損傷率,試驗結果如表2所示。

表2 不同步進電機轉速下各項采摘指標Table 2 Various indexes of navel orange picking at different speed of stepper motor
由表2可知,單果采摘時間隨著步進電機轉速的提高而減小,在轉速300 r/min時單果采摘時間最低,可達1.64 s。而在轉速250 r/min時采摘成功率最高,可達94.28%。損傷率不隨轉速的變化而變化,始終為0。在步進電機轉速為250、300 r/min時,采摘成功率相差2.86%,而單果采摘時間僅相差0.12 s,此差值對末端執行器整體的采摘速度的提高影響較小,為了保證較高的采摘成功率,可將250 r/min作為最佳步進電機轉速,此時,單果采摘時間為1.76 s,采摘成功率為94.28%。通過對試驗中沒有成功采摘的臍橙進行分析,發現造成采摘失敗的主要原因為:個別臍橙的果梗長度過短,果實被吸附后果梗與切刀的角度過小,導致切刀無法完全切斷果梗。
5 結論
1)基于臍橙的生物特性與欠驅動原理設計了一種臍橙采摘末端執行器,可以實現對臍橙的無損采摘,該執行器包括吸附機構、夾持機構和旋切機構3部分,其中吸附機構用于實現果實與果簇快速分離,夾持機構用于對果實進行無損穩定夾持,旋切機構用于將果實與果梗快速分離。
2)搭建末端執行器實體樣機,以步進電機轉速為因素,以單果采摘時間、采摘成功率和損傷率為指標,進行了105次采摘試驗,根據試驗結果,選取250 r/min作為最佳步進電機轉速,此時單果采摘時間為1.76 s,采摘成功率為94.28%,損傷率為0。
3)本文設計的末端執行器機構簡易輕巧,控制系統的設計簡單可靠,選用了嵌入式運動控制器作為主控制器,實現了機械臂控制系統與末端執行器控制系統的集成,可為后續臍橙采摘機器人的整體研發提供技術支持。
[1]彭婷,黃鶴.贛南臍橙供應鏈管理研究[J].合作經濟與科技,2017(17):118-120.
[2]李秦川,胡挺,武傳宇,等.果蔬采摘機器人末端執行器研究綜述[J].農業機械學報,2008,39(3):175-179.Li Qinchuan,Hu Ting,Wu Chuanyu,et al.Review of end-effectors in fruit and vegetable harvesting robot[J].Transactions of the Chinese Society for Agricultural Machinery,2008,39(3):175-179.(in Chinese with English abstract)
[3]李國利,姬長英,翟力欣.果蔬采摘機器人末端執行器研究進展與分析[J].中國農機化學報,2014,35(5):231-236.Li Guoli,Ji Changying,Zhai Lixin.Research progress and analysis of end-effector for fruits and vegetables picking robot[J].Journal of Chinese Agricultural Mechanization,2014,35(5):231-236.(in Chinese with English abstract)
[4]Muscato G,Prestifilippo M,Abbate N,et al.A prototype of an orange picking robot:Past history,the new robot and experimental results[J].Industrial Robot:An International Journal,2005,32(2):128-138.
[5]Ceres R,Pons J L,Jiménez A R,et al.Design and implementation of an aided fruit-harvesting robot[J].Industrial Robot:An International Journal,1998,25(5):337-346.
[6]Monta M,Kondo N,Ting K C.End-effectors for tomato harvesting robot[J].Artificial Intelligence Review,1998,12(1):11-25.
[7]Bac C W,Hemming J,van Tuijl B A J,et al.Performance evaluation of a harvesting robot for sweet pepper[J].Journal of Field Robotics,2017,34(6):1123-1139.
[8]Silwal A,Davidson J R,Karkee M,et al.Design,integration,and field evaluation of a robotic apple harvester[J].Journal of Field Robotics,2017,34(6):1140-1159.
[9]宋健,張鐵中,徐麗明,等.果蔬采摘機器人研究進展與展望[J].農業機械學報,2006,37(5):158-162.Song Jian,Zhang Tiezhong,Xu Liming,et al.Research actuality and prospect of picking robot for fruits and vegetables[J].Transactions ofthe Chinese Society of Agricultural Machinery,2006,37(5):158-162.(in Chinese with English abstract)
[10]Zhao Yuanshen,Gong Liang,Liu Chengliang,etal.Dual-arm robot design and testing for harvesting tomato in greenhouse[J].IFAC-Papers Online,2016,49(16):161-165.
[11]WangGuohua,YuYabo,FengQingchun.Designof end-effector for tomato robotic harvesting[J].IFAC-Papers Online,2016,49(16):190-193.
[12]劉繼展,李萍萍,李智國.番茄采摘機器人末端執行器的硬件設計[J].農業機械學報,2008,39(3):109-112.Liu Jizhan,Li Pingping,Li Zhiguo.Hardware design of the end-effector for tomato-harvesting robot[J].Transactions of the Chinese Society for Agricultural Machinery,2008,39(3):109-112.(in Chinese with English abstract)
[13]錢少明,楊慶華,王志恒,等.黃瓜抓持特性與末端采摘執行器研究[J].農業工程學報,2010,26(7):107-112.Qian Shaoming,Yang Qinghua,Wang Zhiheng,et al.Research on holding characteristics of cucumber and end-effector of cucumber-picking[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2010,26(7):107-112.(in Chinese with English abstract)
[14]張凱良,楊麗,張鐵中.草莓收獲機器人采摘執行機構設計與試驗[J].農業機械學報,2011,42(9):155-161.Zhang Kailiang,Yang Li,Zhang Teizhong.Design and experiment of picking mechanism for strawberry harvesting robot[J].Transactions of the Chinese Society for Agricultural Machinery,2011,42(9):155-161.(in Chinese with English abstract)
[15]傅隆生,張發年,槐島芳德,等.獼猴桃采摘機器人末端執行器設計與試驗[J].農業機械學報,2015,46(3):1-8.Fu Longsheng,Zhang Fanian,Gejima Yoshinori,et al.Development and experiment of end-effector for kiwifruit harvesting robot[J].Transactions of the Chinese Society of Agricultural Machinery,2015,46(3):1-8.(in Chinese with English abstract)
[16]葉敏,鄒湘軍,楊洲,等.荔枝采摘機器人擬人指受力分析與夾持試驗[J].農業機械學報,2015,46(9):1-8.Ye Min,Zou Xiangjun,Yang Zhou,et al.Clamping experiment on humanoid fingers of litchi harvesting robot[J].Transactions of the Chinese Society of Agricultural Machinery,2015,46(9):1-8.(in Chinese with English abstract)
[17]張水波.柑橘采摘機器人末端執行器研究[D].杭州:浙江工業大學,2011.Zhang Shuibo.Research on End-effector of Cirtrus Harvesting Robot[D].Hangzhou:Zhejiang University of Technology,2011.(in Chinese with English abstract)
[18]黃浩乾.采摘機械手的設計及其控制研究[D].南京:南京農業大學,2010.HuangHaoqian.Research on Design and Controlof Harvesting Manipulator[D].Nanjing:Nanjing Agriculture University,2010.(in Chinese with English abstract)
[19]中華人民共和國國家質量監督檢驗檢疫總局,中國國家標準化管理委員會.地理標志產品贛南臍橙: GB/T 20355-2006[S].北京:中國標準出版社,2006:5.
[20]陳勝軍,賈方,韓偉.曲柄滑塊機構運動誤差分析[J].機械設計與制造,2015(3):73-75.Chen Shengjun,Jia Fang,Han Wei.Analysis on motion error of slider-crank mechanism[J]. Machinery Design &Manufacture,2015(3):73-75.(in Chinese with English abstract)
[21]姬偉,羅大偉,李俊樂,等.果蔬采摘機器人末端執行器的柔順抓取力控制[J].農業工程學報,2014,30(9):19-26.Ji Wei,Luo Dawei,Li Junle,et al.Compliance grasp force control for end-effector of fruit-vegetable picking robot[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2014,30(9):19-26.(in Chinese with English abstract)
[22]姬偉,李俊樂,楊俊,等.機器手采摘蘋果抓取損傷機理有限元分析及驗證[J].農業工程學報,2015,31(5):17-22.Ji Wei,Li Junle,Yang Jun,et al.Analysis and validation for mechanical damage of apple by gripper in harvesting robot based on finite element method[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2015,31(5):17-22.(in Chinese with English abstract)
[23]陳燕,談建豪,蔣志林,等.柑橘機器人夾持損傷有限元預測及試驗驗證[J].華南農業大學學報,2016,37(5):98-102.Chen Yan,Tan Jianhao,Jiang Zhilin,et al.Finite element prediction and experimental verification for damage on citrus fruitfrom robotclamping[J].JournalofSouth China Agricultural University,2016,37(5):98-102.(in Chinese with English abstract)
[24]周俊,張娜,孟一猛,等.番茄粘彈性參數機器人抓取在線估計[J].農業機械學報,2017,48(8):26-32.Zhou Jun,Zhang Na,Meng Yimeng,et al.Online estimation of tomato viscoelastic parameters during robot grasping[J].Transactions of the Chinese Society of Agricultural Machinery,2017,48(8):26-32.(in Chinese with English abstract)
[25]張水波,鮑官軍,楊慶華,等.基于機器人采摘的柑橘機械特性研究[J].浙江工業大學學報,2012,40(3):340-344.Zhang Shuibo,Bao Guanjun,Yang Qinghua,et al.Study on mechanical properties of citrus bases on robotic harvesting[J].Journal of Zhejiang University of technology,2012,40(3):340-344.(in Chinese with English abstract)
[26]李智國,劉繼展,李萍萍.機器人采摘中番茄力學特性與機械損傷的關系[J].農業工程學報,2010,26(5):112-116.Li Zhiguo,Liu Jizhan,Li Pingping.Relationship between mechanical property and damage of tomato during robot harvesting[J].Transactions ofthe Chinese Society of Agricultural Engineering(Transactions of the CSAE),2010,26(5):112-116.(in Chinese with English abstract)
[27]孟煒,丁羽,劉媛媛,等.新疆無核白葡萄力學特性研究[J].新疆農機化,2016(1):10-12.Meng Wei,Ding Yu,Liu Yuanyuan,et al.Study on the mechanical properties of Xinjiang seedless grape[J].Agricultural Mechanization in Xinjiang,2016(1):10-12.(in Chinese with English abstract)
[28]尹建軍,陳永河,賀坤,等.抓持-旋切式欠驅動雙指手葡萄采摘裝置設計與試驗[J].農業機械學報,2017,48(11):1-11.Yin Jianjun,Chen Yonghe,He Kun,et al.Design and experiment of grape-picking device with a grasping and rotary-cut type of underactuated double fingered hand[J].Transactions of the Chinese Society of Agricultural Machinery,2017,48(11):1-11.(in Chinese with English abstract)
[29]鄧云,吳穎,李云飛.果蔬在貯運過程中的生物力學特性及質地檢測[J].農業工程學報,2005,21(4):1-6.Deng Yun,Wu Ying,Li Yunfei.Biomechanical properties and texture detection of fruits and vegetables during storage and transportation[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2005,21(4):1-6.(in Chinese with English abstract)
[30]吳立成,孔巖萱,李霞麗.全轉動關節欠驅動手指機構及其運動學分析[J].機械工程學報,2017,53(1):47-54.Wu Licheng,Kong Yanxuan,Li Xiali.Fully rotational joint underactuated finger mechanism and its kinematics analysis[J].Journal of Mechanical Engineering,2017,53(1):47-54.(in Chinese with English abstract)
[31]王通,尹建軍.一種抓取果實的欠驅動手指機構設計與靜力學分析[J].農機化研究,2016(3):110-114.Wang Tong,Yin Jianjun.A type of underactuated finger mechanism design and statics analysis for picking fruit[J].Journal of Agricultural Mechanization Research,2016(3):110-114.(in Chinese with English abstract)
[32]馬學思,戴建生.基于抓持矩陣的二指多關節手抓持規劃和絲傳動設計[J].機械工程學報,2015,51(1):17-23.Ma Xuesi,Dai Jiansheng.Grasp planning and tendon-driven design of two-fingered hand based on grasp matrix[J].Journal of Mechanical Engineering,2015,51(1):17-23.(in Chinese with English abstract)
[33]何競飛,潘祺,鄧華.一種新型欠驅動三指節手指機構的結構設計及優化[J].機械設計與研究,2014,30(6):18-21.He Jingfei,Pan Qi,Deng Hua.Structural design and optimization ofa new type under-actuated 3-knuckle finger[J].Mechanism Machine Design and Research,2014,30(6):18-21.(in Chinese with English abstract)
[34]張文增,陳強,孫振國,等.高欠驅動的擬人機器人多指手[J].清華大學學報:自然科學版,2004,44(5):597-600.Zhang Wenzeng,Chen Qiang,Sun Zhenguo,et al.Super under-actuated humanoid robot multi-fingered hand[J].Journal of Tsinghua University:Sic&Tech,2004,44(5):597-600.(in Chinese with English abstract)
[35]王殿君,嵇鐘輝,劉淑晶,等.六自由度模塊化機器人控制系統設計[J].制造業自動化,2015,37(12):107-109.Wang Dianjun,Ji Zhonghui,Liu Shujing,et al.Designed control system of 6-DOF modular robot[J].Automation of Manufacturing,2015,37(12):107-109.(in Chinese with English abstract)
[36]周青松,張鐵.基于PMAC的機器人控制器調試系統的研制[J].微計算機信息,2009,25(8):245-247.Zhou Qingsong,Zhang Tie.Development of adjusting system of robot controller based on PMAC[J].Microcomputer Information,2009,25(8):245-247.(in Chinese with English abstract)
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04