城軌塞拉門綜合評價方法研究
2018-07-12 03:06:08貢智兵王祖進
新型工業化 2018年6期
貢智兵,王祖進
(南京康尼股份有限公司,江蘇 南京,210038)
0 引言
隨著城市軌道交通的快速發展,客室車門結構日益復雜,使得客室車門故障診斷的需求顯得越來越急迫。因此,為了能夠迅速、準確確定故障原因和部位,以最小的勞動消耗,有效地評價客室車門系統故障狀況,需要對車門系統的工作過程進行研究,匯總門系統性能的影響指標。門系統的綜合評價是通過建立門系統的機電一體化虛擬樣機模型,并基于此模型對門系統在多種工況下的運行過程和性能指標進行研究,進而建立綜合評價指標體系[1-5],實現對門系統的綜合評價[6-8]。
因此,本文采用虛擬樣機技術[9-13],基于已建立的機電聯合虛擬樣機模型[14],對門系統性能的影響指標進行仿真分析,建立門系統的綜合評價指標體系,從而建立二級模糊綜合評判模型[15]對門系統的性能進行綜合評價。
1 門系統性能評價指標體系
已建立的門系統虛擬樣機模型如圖1所示。
1.1 手動關門力
為測量手動開關門力,在門扇前擋構建Spring彈簧力,通過拖拽彈簧,使彈簧被拉長,由于力的作用是相互的,彈簧拉力傳遞到門扇,當彈簧大力大于門扇運動阻力,門扇即可運動,通過測量彈簧張緊力即可間接獲得門扇開關門過程的動態變化力。
通過對長短導柱上的摩擦系數、電機的靜阻扭矩、扭簧剛度對手動關門力的影響程度進行仿真分析,得到如下結論:
1)長導柱上的摩擦系數越大,即門系統在運行方向上的摩擦阻力越大,則手動關門力越大;
2)電機的靜阻扭矩越大,則手動關門力越大;
3)扭簧的剛度越大,則手動關門力越大。
1.2 關門防擠壓力
關門障礙物檢測時的關門防擠壓力大小與電機的電流大小有關,電流越大表明防擠壓力越大,電流越小則防擠壓力也越小。
通過對運動速度和電流限幅對關門防擠壓力的影響程度進行仿真分析,得到如下結論:
1)運動速度越大,則電機驅動電流越大,即關門防擠壓力越大;
2)電流限幅越大,則電機驅動電流越大,即關門防擠壓力越大。
1.3 運動平穩性
對門系統的開關門平穩性進行仿真分析,主要對6個運動階段進行仿真研究,即:開門啟動段、開門加速段、開門到位段、關門啟動段、關門加速段、關門到位段。通過改變上述運動階段參考輸入速度的大小,得到不同運動速度下的接觸力曲線,對接觸力曲線的幅值和波動性進行分析,從而得到上述運動階段的速度對開關門運動平穩性的影響。
已建立的虛擬樣機沒有考慮開關門堵轉情況,所有還需要對開關門堵轉進行仿真分析。在臺架立柱與攜門架上緩沖頭間建立接觸,如圖2所示。對開門堵轉仿真模型進行仿真分析,得到完整的開門過程電機轉速與驅動電流曲線,如圖3、4所示。

圖1 門系統虛擬樣機Fig.1 Virtual prototype of the door system

圖2 開門堵轉仿真模型Fig.2 Simulation model of the open-door blocking

圖3 開門電機轉速仿真結果Fig.3 Simulation results of the motor speed for opening the door
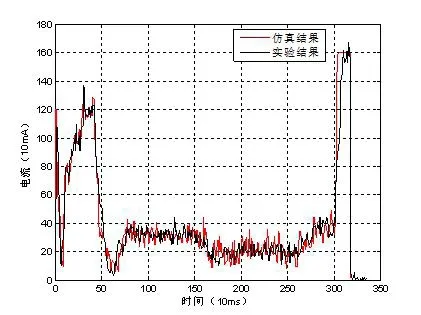
圖4 開門電機電流仿真結果Fig.4 Simulation results of the motor current for opening the door
對關門堵轉進行仿真分析,得到電機轉速與驅動電流曲線,如圖5、6所示。
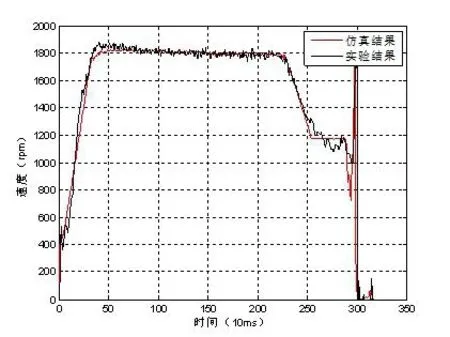
圖5 關門電機轉速仿真結果Fig.5 Simulation results of the motor speed for closing the door
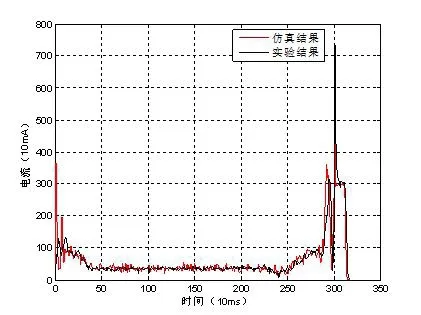
圖6 關門電機電流仿真結果Fig.6 Simulation results of the motor current for closing the door
通過對門系統開關門平穩性的影響因素進行仿真分析,得到如下結論:
1)開門啟動運動速度越大,則接觸力波動越大,即運動平穩性越差;
2)開門加速越快,則接觸力波動越大,即運動平穩性越差;
3)開門到位運動速度越大,則接觸力波動越大,即運動平穩性越差;
4)關門啟動運動速度越大,則接觸力波動越大,即運動平穩性越差;
5)關門加速越快,則接觸力波動越大,即運動平穩性越差;
6)關門到位運動速度過大或者過小,會導致接觸力波動變大,即運動平穩性變差。
1.4 綜合評價指標體系
根據上述對手動關門力、關門防擠壓力和開關門運動平穩性影響因素的仿真分析,可以建立城軌塞拉門的綜合評價指標體系,如圖7所示。綜合評價指標體系包括3個一級指標:手動關門力、關門防擠壓力、開關門運動平穩性,其中手動關門力包括3個二級指標:摩擦阻力、電機靜阻扭矩、扭簧剛度;關門防擠壓力包括2個二級指標:電流限幅、運動速度;開關門運動平穩性包括6個二級指標:開門啟動速度、開門加速速度、開門到位速度、關門啟動速度、關門加速速度、關門到位速度。

圖7 城軌塞拉門綜合評價指標體系Fig.7 Comprehensive evaluation index system of the city track sliding plug door
2 門系統模糊綜合評判模型
根據上述門系統性能的綜合評價指標體系,建立相應的二級模糊綜合評判模型。
2.1 確定模型條件
建立模糊綜合評價模型前,需要確立評價因素集、評語(評價等級)集和權重集。首先,根據圖7,建立二級評價因素集:, 其中:ni為Ui中評價因素的個數。其次,根據評價的具體要求,將評價指標的評價值分成s個等級,即用來表示評語集。然后,確定U和Ui中每個因素在綜合評價過程中的重要程度,設U中每個因素相對U的權重集為:同理,確定Ui的權重集為
2.2 計算評價指標的權重
根據對影響因素的仿真分析結果,對上述綜合評價指標分配權重,分配結果如表1、2所示。

表1 一級評價指標權重分配Table 1 Weight distribution of the level 1 evaluation index

表2 二級評價指標權重分配Table 2 Weight distribution of the level 2 evaluation index
2.3 評判矩陣
對某一門系統確定評價等級的過程等同于確定門系統對每個評價等級vi的隸屬度值的過程。對每一個評價指標Ui進行單指標評價,得出單指標評價矩陣:,其中ini表示Ui中的元素個數,s表示評價等級個數,rij表示指標對評語vi的隸屬度。本文采用德爾菲法確定各評價指標對相應評語的隸屬度。算出Ui的最終評語:。然后將每個Ui作為單獨元素,Ei作為單指標評價向量,構成從U到V的模糊評價矩陣從而得出U的最終評語向量:E =W?R。
3 綜合評價實例
以某個城軌基型塞拉門臺架為例,對其進行綜合評價。該門系統綜合評價指標的具體數值為:手動關門力:140 N;摩擦阻力:0.04;電機靜阻扭矩:190 N·mm;扭簧剛度:5.52N·mm/°;關門防擠壓力:130 N;電流限幅:1.72 A;運動速度:272 mm/s;開門啟動速度:248 mm/s;開門加速度:500 mm/s2;開門到位速度:90 mm/s;關門啟動速度:140 mm/s;關門加速度:600 mm/s2;關門到位速度:225 mm/s。
首先,得到各評價指標的權重向量如下:

然后,確定評價標準集隸屬度,如表3所示。

表3 評價標準集隸屬度Table 3 Membership degree of the evaluation standard set
則可得到:


根據權重向量,可以得出:

最后,將上述評價向量當作第二層的指標評價矩陣,可以得出二級評價結果如下:0.55850.08540.07530.0101],根據最大隸屬度評判準則,對該門系統性能的最終評價為較好。
4 結論
基于已建立的機電聯合仿真模型,對影響手動關門力大小、關門防擠壓力大小、開關門運動平穩性的因素進行了仿真分析,建立了綜合評價指標體系,應用模糊綜合評判法解決了門系統性能的綜合評價問題。在引入實例的基礎上,通過量化和科學計算,最終得出了合理的評判結果,實現了門系統的綜合評價。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
石油瀝青(2021年4期)2021-10-14 08:50:44
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
世界科學技術-中醫藥現代化(2021年10期)2021-03-02 05:52:06
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
中國工程咨詢(2015年2期)2015-02-14 02:59:26