電子調制的激光相干轉軸振動測量技術的研究
2018-07-11 11:19:08王輝林孫士欽
激光技術 2018年4期
柳 康,王輝林,孫士欽
(山東理工大學 儀器科學與技術系,淄博 255049)
引 言
旋轉機械轉軸的振動測量和監控是故障分析和診斷的主要手段,隨著旋轉機械不斷朝高轉速和高精密的方向發展,對振動測量的要求也在不斷提高[1]。近年來,隨著激光器的發展,激光測振成為測振技術研究的主流,而其中激光多普勒測振技術又以其高精度和抗干擾能力強等優勢成為研究的熱點[2]。目前激光多普勒測振裝置已有成熟的產品問世,但絕大多數都是國外研發的,并且價格昂貴測量成本較高。如美國OMS公司LaserPointLP01型振動測試儀就是應用激光多普勒效應,可以在5m工作距離內實現最小振動偏移0.1nm的精密測量,但因其使用聲光調制技術[3],光路復雜、成本較高、普及性較差。為了在保證測量精度的前提下降低成本,實現便攜式的現場測量,提出了電子直接調制的激光多普勒相干測量系統。通過電子直接調制激光束頻率[4],克服了聲光調制光路復雜的缺點,降低了成本、減小了體積,有利于便攜的現場測量,通過二次混頻和取樣積分等信號處理措施,使測量系統的精度更高。
1 理論分析和數學模型
半導體激光器通過驅動電路的調制產生頻率為f1的光束[5],經分光鏡后分為頻率相同的兩束:其中一束作為測量光束經透鏡L1匯聚于被測物體一點,被測物體特定方向的運動使光束產生多普勒頻移并反射得到頻率為f2的光束,經過透鏡L2后被光電探測器接收;另一束作為參考光束也經透鏡L2后被光電探測器接收。f1和f2在以雪崩光敏二極管為核心的光電探測器上進行光學混頻[6],實現相干測量。振動測量光路如圖1所示。
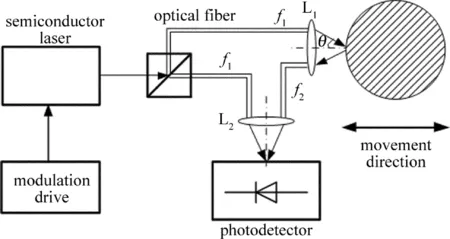
Fig.1 Optical path of vibration measurement
在測量光路中:
f1=f0+fm
(1)
f2=f0+fm+fD
(2)
式中,f0為激光器固有頻率;fm為調制頻率,穩定在100MHz;fD為被測物體運動產生的多普勒頻移[7]。多普勒頻移與運動速度之間滿足如下關系:
fD=2vxcosθ/λ
(3)
式中,vx為被測物體在水平方向上的速率,θ為入射光線與被測點水平振動方向間的夾角,λ為激光波長[8]。光電探測器表面接收到頻率分別為f1,f2的兩束光,其合成的電場強度為:
E=E1cos(2πf1t+φ1)+E2cos(2πf2t+φ2)
(4)
式中,E1和E2分別為兩道光波照射到光電探測器表面的電場強度幅值;φ1和φ2分別為其初始相位;t為時間。由此可得其光學混頻表達式為:
U(t)=b0+b1E+b2E2=
b0+b1E1cos(2πf1t+φ1)+b1E2cos(2πf2t+φ2)+
b2E1E2cos[2π(f1+f2)t+(φ1+φ2)]+
b2E1E2cos[2π(f2-f1)t+(φ2-φ1)]
(5)
式中,b0,b1和b2為常數,其具體數值和光電探測器自身參量有關。由于光電探測器無法響應1014數量級及以上的頻率,所以上式中包含f1,f2,f1+f2項均無法響應,直流分量可以加電容濾除。因此光電探測器的輸出僅為差頻項:
U(t)=b2E1E2cos(2πΔft+Δφ)
(6)
因為f1和f2為相干光,所以(6)式中的兩相干光的相位差Δφ為常數,可以通過相位補償手段將其去除[9]。經過一系列的微弱信號處理之后,可得輸出電壓:
Uf(t)=U0cos(2πfDt)
(7)
系統嵌入STM32微處理器,經模數轉換后通過快速傅里葉變換得到的頻率即為多普勒頻移fD。
由此可得被測物體在振動方向上的速度為:
(8)
積分可求得振動方向的位移,即:
(9)
2 實驗系統設計
為了實現高分辨率、便攜式的智能化測量,設計了本振動測量系統,其框圖如圖2所示。
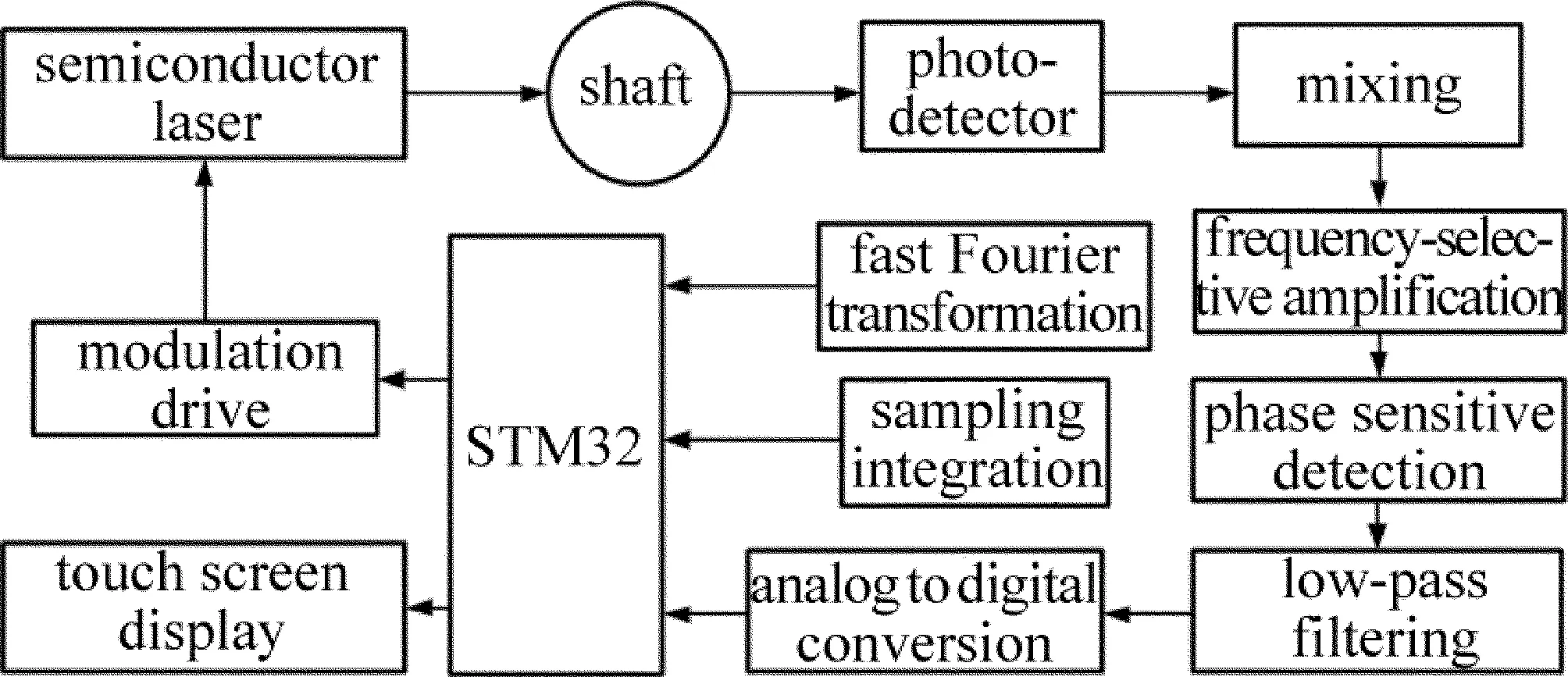
Fig.2 Block diagram of vibration measurement system
2.1 半導體激光器的頻率調制
通過對半導體激光器注入電流的控制,就可以實現對光頻率和光功率調制[10]。半導體激光器的注入電流與輸出功率的關系如圖3所示。
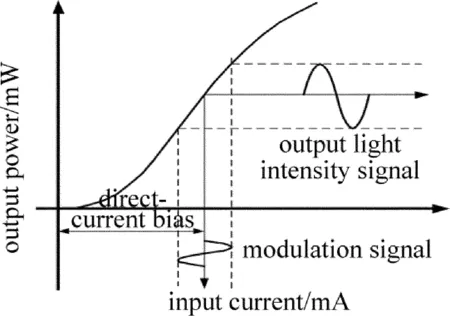
Fig.3 Principle of direct modulation
假設半導體激光器的驅動電流為:
i=I0+Imcos(2πfit)
(10)
式中,I0和Im分別為直流偏置電流和調制電流峰值[11],fi為其頻率。則半導體激光器的光頻率為:
V=V0+ηImcos(2πfit)
(11)
式中,V0為偏置電流作用下基本光頻率,比例系數η為驅動電流光頻率調制率,僅與半導體激光器自身相關參量有關[12]。本系統選擇法國Oxxius公司的穩頻可調諧半導體激光器,通過驅動電路調制出穩定的100MHz正弦波。100MHz是經過慎重考慮選取的,一方面是半導體激光器在這個頻段的調制性能最好,調制出的正弦波最穩定,另一方面就是相干性方面的考慮[13]。
2.2 二次混頻
測量光和參考光在光電二極管上進行光學混頻后得到差頻信號,這種低頻信號很微弱[14],極易受電磁干擾的影響而難以用常規的濾波放大方法準確提取處理有用信號,所以通過混頻的方法將其頻率搬移到中頻fLO=10.7MHz可解決這個問題[15]。本部分先對測量信號進行濾波放大的預處理,然后在乘法器中與晶體振蕩器產生的10.7MHz的本振信號進行混頻,主要得到差頻、和頻以及諧波混頻3種頻率成分信號,通過選頻濾波電路將和頻信號取出,用常規的中頻信號處理方法即可對其進行后續處理。二次混頻處理過程如圖4所示。
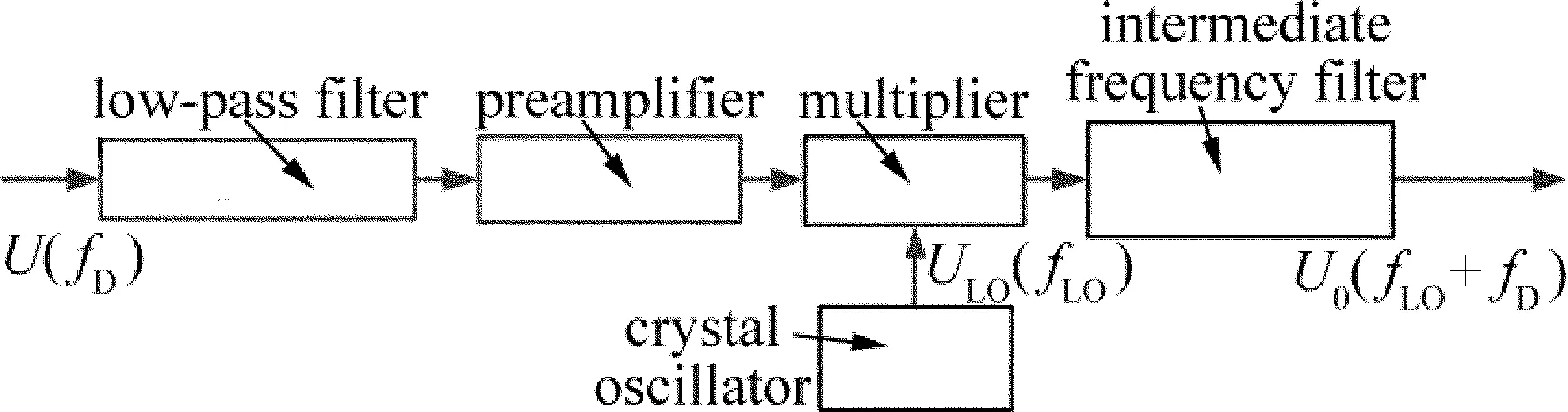
Fig.4 Block diagram of the second frequency-mixing
3 實驗數據分析及技術措施
通過目前發布的轉軸振動標準可知,優先選擇的轉軸振動測量是位移,而以測量方向上的振動位移峰-峰值SPP作為評定指標,SPP為系統測得最大位移和最小位移之差,由微處理器對數據處理后同時頻信號一起顯示在觸摸屏上。受限于實驗室的條件,用LaserPointLP01型振動測試儀和本測量系統對JX-3B型標準振動臺進行振動測量,形成對比實驗。

Table 1 The maximum peak-peak vibration before enhancement

(12)


Table 2 The maximum peak-peak vibration after enhancement
由(12)式計算可得改進后的系統相對誤差為0.0818%,滿足小于0.1%的測量系統設計要求。
經過多次實驗得到測量系統的主要技術參量如表3所示。
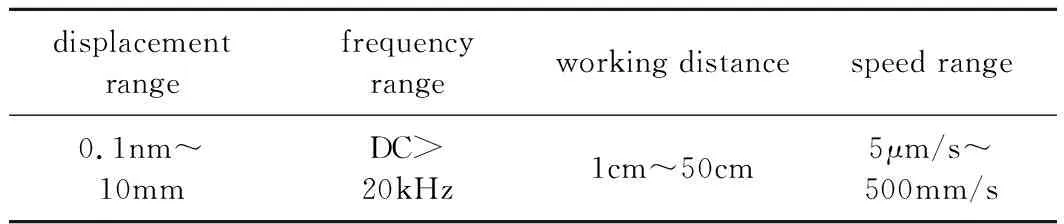
Table 3 Main technical parameters of the measurement system
4 不確定度評定
4.1 激光光源引起的不確定度u(λ)
本系統中采用633nm可調諧的半導體激光器,直接調制后的光波穩定性小于0.06%,用矩形分布估計其不確度為3.46×10-4。
4.2 夾角θ引起的不確定度u(θ)
在進行數據處理時假定入射光線和反射光線與傳感器振動方向的夾角不變。但實際上由于距離原因該夾角是在(θ-Δθ)~(θ+Δθ)之間變化的,最大誤差限為0.06%,用三角分布可估算其不確定度為2.45×10-4。
4.3 光電探測器引起的不確定度u(d)[17]
本系統選擇的硅光電探測器的波長范圍為400nm~1000nm,擴展不確定度為0.08%,置信概率p=99%,包含因子k=2.576,所以可得由光電探測器導致的標準不確定度為3.11×10-4。
4.4 信號處理過程引起的不確定度u(i)
二次混頻和取樣積分等處理手段使系統信噪比得到極大改善,經實驗驗證這一部分產生的誤差實驗測量得電路產生的誤差不高于0.05%,用正態分布估計其不確定度為1.67×10-4。
4.5 外界因素引起的不確定度u(o)
在校準過程中,系統受到外界溫度、濕度、雜散光等干擾,實驗結果表明這部分誤差總體小于0.08%,用正態分布估計其不確定度為2.67×10-4。
因此,合成標準不確定度為:
0.0613%<0.1%
(13)
由此可得系統的不確定度小于0.1%,達到設計要求。
5 結 論
在理論分析的基礎上,提出了電子直接調制的激光多普勒相干轉軸振動測量技術并設計了實驗系統。通過電子直接調制,克服了聲光調制的諸多缺點,降低了成本,增強了適用性;二次混頻的處理方法,巧妙的解決了在電磁干擾下難以用常規的濾波放大方法準確提取處理有用信號的技術局限;取樣積分技術的應用,提高了信噪比,使系統達到更高的精度。經實驗分析可知,此系統分辨率高、動態性能好、抗干擾能力強,對環境相對復雜的現場測量有著廣闊的應用前景。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(2020年6期)2020-09-10 07:22:44
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45