小型茶樹開溝和施肥一體機的設計和仿真
2018-07-10 11:39:26葉自旺胡樹良李昊達
農機化研究 2018年8期
關鍵詞:方向
李 競,葉自旺,胡樹良,梁 策,李昊達
(廣西大學 機械工程學院,南寧 530004)
0 引言
茶葉是世界著名的三大飲料之一,具有清頭目、醒精神、解煩渴、利小便、消食積及解毒等功效,一直深受廣大消費者的喜愛。全國分布有幾大茶葉種植區,廣西就是其中一個重要的茶葉生產區。由于廣西為丘陵地帶,且自然條件惡劣,使得茶葉的種植工作主要依靠手工的方法進行。另外,茶樹主要種植在丘陵山地等地帶,土地緊實,不易進行開溝工作,單純依靠手工進行開溝和施肥顯然勞動強度大,影響了茶葉的經濟效益和社會效益,使得純手工的茶樹開溝和施肥難以滿足日益增長的茶葉需求。
為了解決純手工的茶樹開溝和施肥勞動強度大等問題,本文提出了一種小型茶樹開溝和施肥一體機,為解決茶樹開溝和施肥過程中純手工作業勞動強度大的問題提供了新思路,并為應對實際開溝和施肥過程中存在的問題提供了解決方案。在小型茶樹開溝和施肥一體機的設計過程中,進行適應性設計,實現了小型茶樹開溝和施肥一體機的刀具升降功能及在開溝過程中進行自動施肥的功能。同時,對設計方案進行運動仿真,確定該機械的可行性設計方案,避免產生干涉等問題。另外,對小型茶樹開溝和施肥一體機進行試驗,獲得數據,以此來優化小型茶樹開溝和施肥一體機的結構及零部件的尺寸,在滿足社會需求的情況下實現小型茶樹開溝和施肥一體化。
1 裝置的結構設計及工作原理分析
1.1 小型茶樹開溝和施肥一體機的結構設計
小型茶樹開溝和施肥一體機主要由3大部分組成,分別為車架、升降機構及電機傳動機構。其中,升降機構主要應用升降桿上的套筒在升降導槽上做滾動運動而使得升降架進行上下運動,從而帶動開溝刀具升降運動的原理,同時應用了螺紋自鎖的原理,使得升降架在螺桿的自鎖作用下進行開溝刀具的定位,開溝刀具則在轉盤的調節下處于開溝和不開溝狀態。在電機傳動機構中,通過減速機和皮帶的帶動,使得電機可以通過驅動開溝刀具進行旋轉運動;同時,考慮到實際工作過程中動力因素,為電機傳動機構配備了減速機進行動力的傳動,起到減速增距的作用,從而保證實際工作中的開溝作業;為了保持皮帶的張緊力,需要增加張緊輪,以保證皮帶的傳輸效率。運用三維造型軟件UG進行三維造型,具體結構如圖1和圖2所示。
1.2 小型茶樹開溝和施肥一體機的傳動部分的設計
本文主要針對小型茶樹開溝和施肥一體機中的電機傳動機構進行設計,以此來保證小型茶樹開溝和施肥一體機獲得足夠的動力,滿足生產需要。
此處選擇的皮帶類型為普通A型V帶,設置兩皮帶輪的距離為a=500mm,大帶輪的直徑為d2=315mm,小帶輪直徑d1=90mm,由此可計算出小帶輪與大帶輪的包角分別為?1和?2,即
此時,選擇的皮帶輪包角都大于120°,可保證皮帶與帶輪的接觸面產生的總摩擦力很大,使皮帶的傳動能力提高,保證了開溝需求。
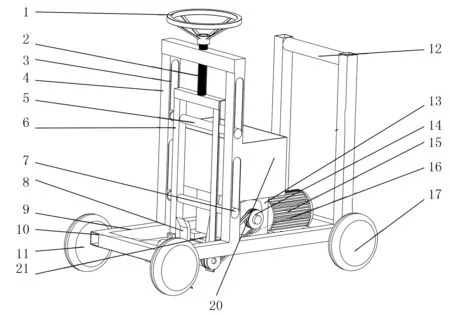
圖1 小型茶樹開溝和施肥一體機的三維造型
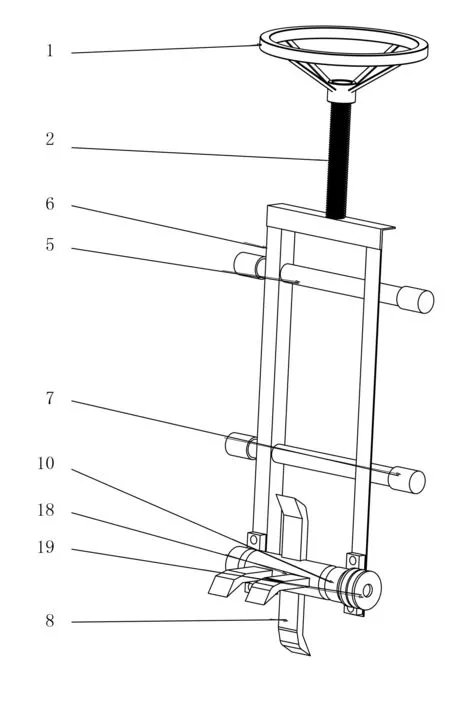
1.轉動手盤 2.螺桿 3.升降導槽 4.升降固定架 5.升降桿 6.升降架 7.升降桿套筒 8.開溝刀片 9.機底架 10.滾動軸承座 11.前輪 12.把手 13.減速機 14.大帶輪 15.電機 16.皮帶 17.后輪 18.開溝刀具 19.小帶輪 20.肥料收集箱 21.肥料輸出管
1.3 小型茶樹開溝和施肥一體機的工作原理分析
小型茶樹開溝和施肥一體機是一種能夠實現茶樹開溝和施肥一體化、同時具有刀具升降功能及在開溝的過程中進行自動施肥功能的農業機械設備,其整體的運動是靠電機在驅動開溝刀具旋轉過程中推動小型茶樹開溝和施肥一體機向前運動;當開溝刀具不工作時,可通過推動把手使得小型茶樹開溝和施肥一體機向前運動,通過旋轉轉動手盤,使得升降機構在套筒升降導槽的滾動輔助作用下讓開溝刀具進行升降運動;同時,在轉動手盤的下方通過螺桿上螺紋的自鎖作用能夠實現開溝刀具的定位作用,使得開溝刀具能夠懸停在一定的高度,方便進行作業。
車架由升降導槽、升降固定架、機底架、前輪、把手、后輪、肥料收集箱及肥料輸出管組成。其中,升降固定架和前輪位于小型茶樹開溝和施肥一體機的前方,升降固定架豎直安裝,與肥料收集箱焊接在一起;肥料輸出管安裝在肥料收集箱的底部,在升降固定架上開有4處升降導槽,使得升降機構上的升降架能夠在上面進行豎直升降運動;把手和后輪安裝在小型茶樹開溝和施肥一體機的后方,機底架位于整體裝置的底部,起到支撐的作用;車架起支撐作用,主要用來放置電機及開溝刀具等機構。
升降機構由轉動手盤、螺桿、升降桿、升降架、升降桿套筒、開溝刀片、滾動軸承座及開溝刀具組成。轉動手盤位于裝置的最上方,轉動手盤下連接有螺桿,螺桿穿過帶有螺孔的升降固定架,可利用螺紋的自鎖作用實現開溝刀具在豎直方向上的定位;在螺桿的底部用螺母連接有升降架,升降架上平行分布有兩根升降桿,在每根升降桿的首尾兩端上安裝有套筒,通過套筒的滾動作用可以實現升降機構的升降運動;在升降架的底端安裝有兩個滾動軸承座,其中間分布有開溝刀具,開溝刀具由4片開溝刀片組成,4片開溝刀呈現“T”字形分布,在橫向方向上左右兩邊分別分布有1片開溝刀,在縱向方向上同向分布有兩片開溝刀。升降機構是小型茶樹開溝和施肥一體機重要組成部分,主要通過旋轉轉動手盤穿過帶有螺孔的升降固定架,從而使得機構作上下升降運動,以及螺紋的自鎖功能,實現開溝刀具的調節定位作用,使得開溝刀具可以按照預定的高度進行開溝,保證了小型茶樹開溝和施肥一體機工作的可靠性。
電機傳動機構由減速機、大帶輪、電機、皮帶及小帶輪組成,電機通過螺栓和螺母固定在車架上,減速機也通過螺栓和螺母固定在車架上,電機和減速機通過套筒連接在一起。在減速機的輸出軸上安轉有大帶輪,小帶輪安裝在開溝刀具的同軸上,大帶輪通過皮帶可以帶動小帶輪進行運動,進而帶動開溝刀具進行旋轉運動。電機傳動機構作為小型茶樹開溝和施肥一體機的動力部分,主要通過電機和減速機的作用帶動皮帶轉動,使得開溝刀具進行旋轉,實現小型茶樹開溝和施肥一體機的功能。
2 小型茶樹開溝和施肥一體機的動態仿真
在UG中做好三維造型后直接在UG中進行運動仿真,目的在于驗證設計機械的可運行性及是否存在機械運動過程中的零件干涉問題。對該裝置的整體進行仿真約束,模擬該裝置在實際使用過程中的運動情況,從而優化小型茶樹開溝和施肥一體機的結構。對裝置的整體進行了仿真約束(見圖3),主要對其在實際工作中所具有的運動進行約束,真實再現了小型茶樹開溝和施肥一體機的工作環境。

圖3 小型茶樹開溝和施肥一體機的仿真約束圖
2.1 開溝刀的仿真
對小型茶樹開溝和施肥一體機進行整體仿真運動約束之后,現在著重對升降機構的開溝刀具在x、y和z方向上的位移運動進行仿真。由于其在x軸方向的坐標是不變的,因此在這里省略了對小型茶樹開溝和施肥一體機的開溝刀在x軸方向的坐標變化圖。在仿真運動的過程中,充分考慮了零件干涉及實際工況會出現的各種問題,以此來確定升降機構的開溝刀具在y和z方向上的位移量,確保運動仿真的結果能夠滿足實際生產需要。通過對這兩個方向上的位移量的分析,可確定小型茶樹開溝和施肥一體機的開溝范圍,從而驗證該小型茶樹開溝和施肥一體機的運動可靠性和實用性。
這里選擇開溝刀尖上的一個點來研究小型茶樹開溝和施肥一體機的開溝刀具進行自身旋轉時在z方向上位移量的運動仿真。小型茶樹開溝和施肥一體機的開溝刀具進行自身旋轉時在z方向上的位移范圍圖如圖4所示。
小型茶樹開溝和施肥一體機的旋轉刀具在z方向上的最大位移量為:z=396.08-141.29=254.79mm。
此時,由于旋轉刀具在電機的驅動下運動時y軸和z軸方向的位移量是一樣的,因而省略了小型茶樹開溝和施肥一體機的旋轉刀具在y方向上的運動位移量圖。
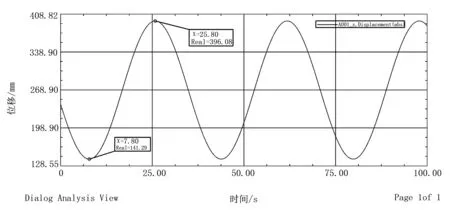
圖4 小型茶樹開溝和施肥一體機的開溝刀在z方向上的位移量
2.2 小型茶樹開溝和施肥一體機的升降架的仿真
對小型茶樹開溝和施肥一體機進行整體仿真運動約束確定其運動狀況之后,著重研究升降機構上的升降架在x、y和z方向上的位移運動。由于其在x和z軸方向的坐標是不變的,因此省略了對小型茶樹開溝和施肥一體機的升降架在x和z軸方向的坐標變化圖。在仿真運動的過程中,充分考慮了零件干涉及實際工況會出現的各種問題,以此來確定升降機構的升降架在y方向上的位移量,確保運動仿真的結果能夠滿足實際生產需要。通過對這一個方向上的位移量的分析,可確定小型茶樹開溝和施肥一體機做升降運動的范圍,從而驗證該小型茶樹開溝和施肥一體機的運動可靠性和實用性。
通過仿真運動約束,限制了升降機構的上升高度,因為過高的上升高度對開溝的范圍沒有太大的影響。由于主要的工作機構是開溝刀具,因此選擇開溝刀尖上的一個點來研究小型茶樹開溝和施肥一體機的升降架在y方向上的位移量的運動仿真。小型茶樹開溝和施肥一體機的升降架在y方向上的位移范圍圖如圖5所示。
小型茶樹開溝和施肥一體機升降架在y方向上的最大位移量為:y=-15.80-(-165.80)=150.00mm。
通過對小型茶樹開溝和施肥一體機的開溝刀具的運動仿真,可以確定其開溝刀具在y和z軸方向上的最大位移量為257.79mm,升降架在y軸方向上的最大位移量為150mm。
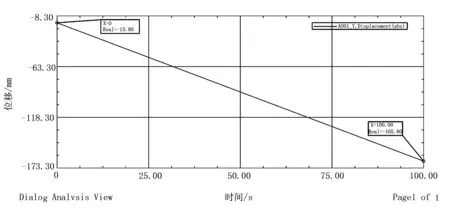
圖5 小型茶樹開溝和施肥一體機的升降架在y方向上的位移量Fig.5 The amount of displacement of the small tea tree ditch and fertilizers of the lift frame in the y direction
3 小型茶樹開溝和施肥一體機仿真結果分析
在上面對小型茶樹開溝和施肥一體機的運動仿真中可以得知裝置運行的穩定性,在仿真運動的過程中充分考慮了零件干涉及實際工況會出現的各種問題,確定了小型茶樹開溝和施肥一體機的開溝刀具及升降架在x、y、z方向上的位移量。
以車輪的最低點作為地面的高度,同時以升降架的最低點進行運動仿真,此時可以得到開溝刀在進行工作時的開溝范圍及開溝深度。圖6為小型茶樹開溝和施肥一體機開溝刀具的開溝范圍及開溝深度圖。
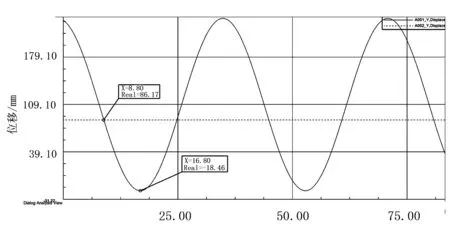
圖6 小型茶樹開溝和施肥一體機的最大開溝深度圖
由以上各圖可以得到開溝刀具的開溝最大深度h=86.17-(-18.48)=104.65mm,能夠滿足生產需要。
4 試驗及分析
由仿真可知:小型茶樹開溝和施肥一體機是可行的。經過對茶樹生活環境及生長規律的研究,不斷優化產品的機構,確定各零件的具體數值及裝配工藝,并進行試驗和效率測試,以保證小型茶樹開溝和施肥一體機的工作效率明顯高于人工開溝和施肥,并最大限度地減輕農民們的勞動強度。對小型茶樹開溝和施肥一體機進行實地測試,可得到小型茶樹開溝和施肥一體機的強度滿足實際要求,且具有很好的開溝和施肥效率,同時開溝和施肥的速度比純手工作業快將近2倍。小型茶樹開溝和施肥一體機結構緊湊,開溝效率高,對茶樹的開溝和施肥有很好的適應性及良好的應用前景,其實物圖如圖7、圖8所示。

圖7 小型茶樹開溝和施肥一體機整體實物圖

圖8 小型茶樹開溝和施肥一體機部分實物圖
5 結論
經過仿真及實地測試可知:小型茶樹開溝和施肥一體機具有良好的工作可靠性和適應性,實際工作效率是純手工作業的將近2倍。小型茶樹開溝和施肥一體機結構緊湊,開溝效率高,對茶樹的開溝和施肥有很好的適應性,具有明顯優于傳統手工的優勢,可滿足社會生產需要,極具發展前景。
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50
