基于RBF網絡最小參數學習法的機械手終端滑模控制
2018-06-29 02:51:38劉昕明呂東東
自動化與儀表 2018年6期
關鍵詞:模型
劉昕明,呂東東
(遼寧工程技術大學 電氣工程與控制工程學院,葫蘆島125105)
滑模變結構控制以其對系統參數變化和外部擾動的魯棒性而著稱,線性滑模控制(LSMC)是系統到達滑模面后,跟蹤誤差漸進收斂至零[1],并且可以通過選擇滑動模態參數來調整漸進收斂的速度,但是無論如何調整,狀態跟蹤誤差都不能在有限時間內收斂至零。為了解決無限時間收斂問題,采用終端滑模控制,通過在線性滑模面中引入非線性函數項和適當設計控制器,使得跟蹤誤差在有限時間內收斂到零,并且相對于線性滑模控制魯棒性更強。由于TSMC自身也存在缺點會出現奇異問題[2-3],為了避免奇異問題的出現,對終端滑模面進行了改進[4]。由于要設計的控制器依賴于機械手的精確數學模型,而機械手的某些項是不能確定的,可以采用RBF神經網絡去逼近不確定項。RBF神經網絡是一種非線性模型,具有收斂速度快、全局逼近能力強等優點,對于復雜不確定問題具有自適應能力和自學習能力,可以應用于非線性和不確定系統的控制器設計中[5]。為了簡化自適應算法,增強實時控制的要求,用單個參數取代神經網絡權值。把RBF神經網絡算法和終端滑模算法結合起來控制兩關節的機械手,并用Lyapunov定理證明穩定性,然后用Matlab/Simulink仿真實驗。
1 機械手動力學模型
一個串行N關節機器人機械手的動力學模型可以用拉格朗日形式表示為[6]

式中:q∈Rn是關節角位移量;∈Rn是關節速度矢量;τ∈Rn是施加的扭矩輸入向量;M(q)∈Rn×n是非奇異的正定慣性力矩陣;C(q,)∈Rn是離心力和哥氏力項;G(q)∈Rn是重力力矩矢量;B=diag{B1,B2,…,Bn}是代表機器手的粘性摩擦系數的對角矩陣。
1.1 機械手的混合動力學模型
為了應用適當的控制算法,機器手動力學模型應該轉換為每個關節點相對應執行器的等效動力學模型[7-8]。機械臂的每個關節是由直流伺服電機驅動的,在電機軸上機械手驅動器動力學數學模型可以描述為

式中:τm∈Rn是電機提供的轉矩矢量;qm∈Rn是電機軸的角位移;τ1∈Rn表示在電機軸上的負載轉矩矢量;Jm=diag{Jm1,Jm2,…,Jmn}是電機軸上的轉動慣量對角矩陣;Bm=diag{Bm1,Bm2,…,Bmn}是電機軸的粘性摩擦系數的對角矩陣。
由于每個關節是由一個直流伺服電機通過諧波傳動系統驅動,我們可以得到式中:N=diag{n1,n2,…,nn}是一個齒輪比的對角矩陣。

直流電動機的轉矩是與電樞電流成比例的。所以,我們可以得到:

式中:Kτ=diag{Kτ1,Kτ2,…,Kτn}是一個轉矩常數的對角矩陣;u∈Rn是電動機電樞電流矢量。
式(1)~式(5)機械手的動態模型可以寫成:

式中:
一般情況下,機械手系統的動力學具有以下三個特性:
特性1 慣性矩陣MH(q)是對稱正定矩陣,存在正數 m1,m2滿足
特性 2 矩陣 CH(q,)和慣性矩陣 MH(q)的導 數滿足屬于正實數);
1.2 控制目標
機械手的控制目標是設計一個穩定的新型控制器,使換到機械手輸出軌跡q快速準確地跟蹤給定期望軌跡qd,即保證跟蹤誤差e在有限時間內收斂到零。qd是給定的二階連續可導的期望軌跡,定義跟蹤誤差e=qd-q。
2 改進終端滑模面的設計

式中:;p=p1/p2,p1和 p2是正奇數滿足p2>p1,Λ是正定對角參數矩陣。
在式(7)中S的第i個元素可以寫成如下形式:

當終端滑模中Si=0,表明:

從式(9)中知,ei=0 是系統(7)的終端吸引子,然后對跟蹤誤差ei到達零的時間tei為

是可導的,我們得到由于含有負分數冪 p-1,如果0,ei=0時,可能會引起奇異問題。
在終端滑模面上時(S=0),根據式(9)則有:
如果 p>1/2,中就會沒有負分數冪。 但是,在Si≠0和ei=0的情況下仍然存在奇異性問題。可以采用間接的方法避免奇異性問題[10],通過切換終端滑模面和線性滑模面來避免奇異問題,但是由于簡單的轉換并不能完全消除奇異,提出了改進的終端滑模面。 我們首先改進為

式中
式中:是一個正常數;Λii是一個正常數。
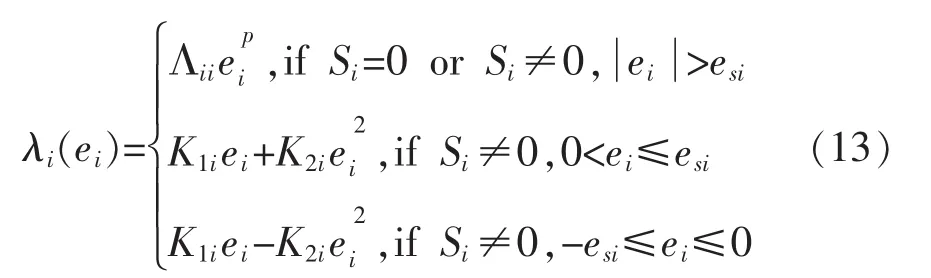
改進的滑模面如圖1所示,表示為

式中:λ(e)= [λ1(e1),λ2(e2),…,λn(en) ]T。
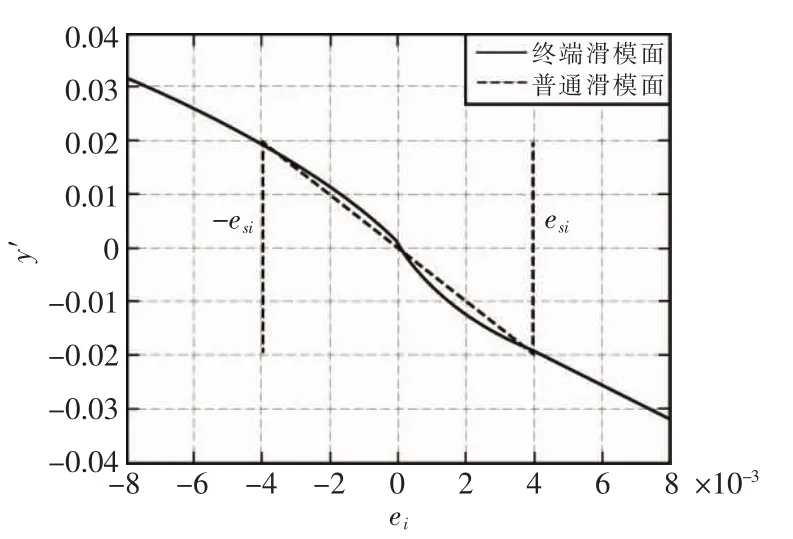
圖1 改進的終端滑模面Fig.1 Improved terminal sliding surface
通過選擇p>1/2,終端滑模控制(Si=0)的奇異問題是可以避免的。在Si≠0情況下,當ei進入到|ei|≤esi區域時,從終端滑動面切換到一般滑動面上。因此,在Si≠0且ei=0的情況下,奇異性問題也可以被克服。
3 新型控制器的設計
3.1 RBF神經網絡最小參數的TSMC控制器設計
由和式(8),閉環動力學公式可以寫成:

式中機器手非線性函數為

如果機器手的非線性函數f是已知的,那么控制器可以定義為

式中:K是一個正定對角常數矩陣;r=r1/r2,其中r1和r2是正奇數滿足
在式 (17)中控制輸入u包含一個非線性PD項,就是把式(17)代入式(8)中,我們可以得到如下的閉環系統:

用Lyapunov理論證明閉環系統(18)的穩定性。問題是如果f的參數和結構是未知的,那么基于模型的控制器是不可用的。因此,采用RBF神經網絡逼近非線性函數 f。
假設存在一個不變的理想權重矩陣w,由RBF神經網絡逼近非線性函數的性質可知f可以寫成:

式中:為輸入向量;ε是RBF神經網絡的建模誤差;h(x)為常用的高斯函數。
上述控制器中RBF神經網絡逼近非線性函數f中的未知參數,實現了無需模型信息的神經網絡自適應控制,但是該算法不利于實時控制。那么,我們對該算法進行適當改進,采用單個參數φ,不需要基于數學模型信息,可代替RBF神經網絡中的權值W,以此來實現基于單參數估計的自適應控制[11]。
取為第 i個關節點的估計權值,并且令=wi-,取單個參數 φ,令,φ 為正常數,為 φ 的估計值,
定義根據GL算子[12],我們定義:

式中的?表示矩陣相乘。
把式(19)可以改寫成

那么控制輸入u就設計為
把改進的控制輸入(21)代入式(6)中得:

3.2 新型控制器穩定性分析
定義Lyapunov函數:

式中,γ>0。
于是:
由于:
又由于:

式中:n為機械手關節的個數。
于是由式(24)~式(28)計算,可以推導出式(29)為
設計自適應律為

則:

為了保證(t)≤0,只需要保證≤STKSr。經過理論推導可以證明控制器的穩定性。
4 實驗結果對比
為了說明驗證所設計控制算法的優點,把RBF神經網絡最小參數的終端滑模控制和RBF神經網絡與線性滑模結合的算法進行比較,然后通過Matlab/Simulink進行盾構機換刀機械手模型建模仿并進行仿真驗證,取機械手的模型參數:
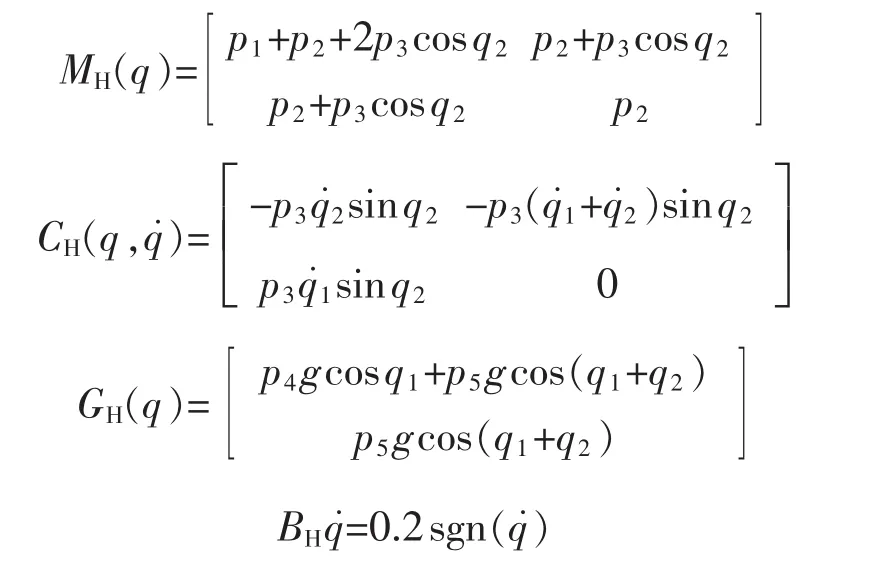
為了更好地顯示動態的跟蹤效果,取p=[p1,p2,p3,p4,p5]=[2.9,0.76,0.87,3.04,0.87]。 兩個關節輸入的期望軌跡分別是 qd1=0.05sint,qd2=0.07sint。
4.1 RBF神經網絡的LSMC控制器
LSMC控制采用RBF神經網絡,這種控制方案應用很廣泛,控制律為

式中:
RBF網絡的權重更新律為控制參數為 K=diag[30,30],Λ=diag[5,5],Γ=20,σ=0.006。 選取模型的初始狀態值為[0.09,0,-0.09,0],仿真結果如圖2~圖4所示。
4.2 RBF神經網絡最小參數的TSMC控制器
TSMC控制采用RBF神經網絡最小參數,控制參數為 K=diag[50,50],Λ=diag[20,20],σ=0.003,diag [1,1],選取模型的初始狀態值為[0.5,0,0.5,0],仿真結果如圖5~圖7所示。

圖2 RBFNN的LSMC機械手關節位置跟蹤Fig.2 RBFNN LSMC manipulator joint position tracking
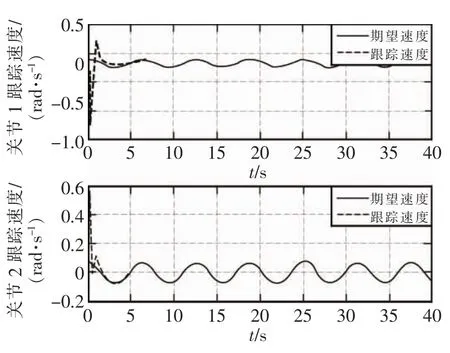
圖3 RBFNN的LSMC機械手關節速度跟蹤Fig.3 RBFNN LSMC manipulator joint velocity tracking

圖4 RBFNN的LSMC機械手關節‖f(x)‖與逼近對比曲線Fig.4 RBFNN LSMC manipulator joint and approximation comparison curve

圖5 RBFNN最小參數TSMC機械手關節位置跟蹤Fig.5 RBFNN minimum parameter TSMC manipulator joint position tracking
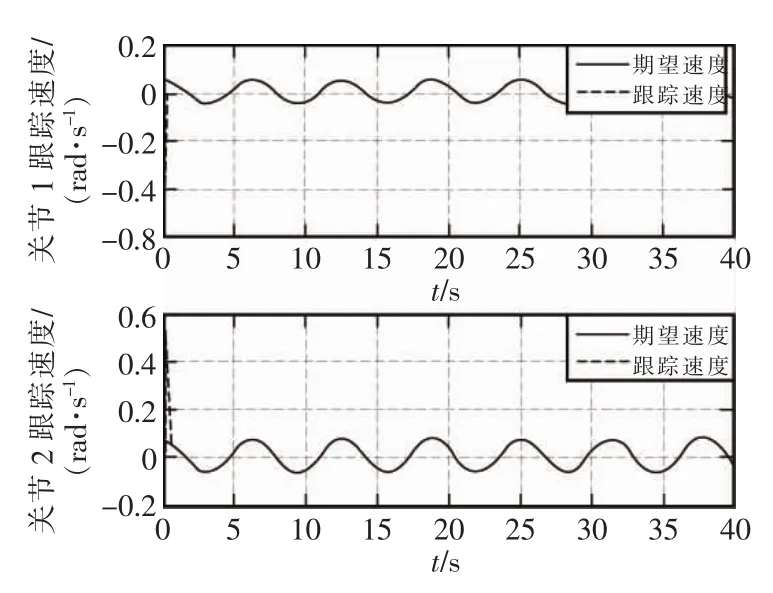
圖6 RBFNN最小參數TSMC機械手關節速度跟蹤Fig.6RBFNN minimum parameter TSMC manipulator joint velocity tracking
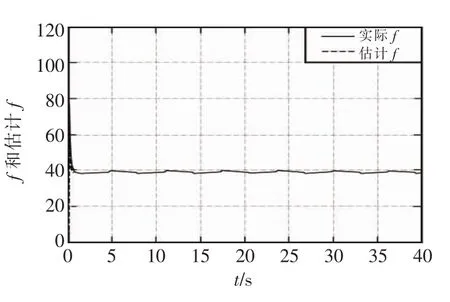
圖7 RBFNN最小參數TSMC機械手關節‖f(x)‖與逼近對比曲線Fig.7 RBFNN minimum parameter TSMC manipulator joint and approximation comparison curve
兩種控制器分別對兩關節機械手控制的仿真結果從圖中可以很明顯地看出,從圖2和圖5對比和圖3和圖6對比得到,采用RBF神經網絡最小參數的TSMC控制器的機械手各關節的位置跟蹤和速度跟蹤性能方面均不到1 s就跟蹤上期望值了,而采用RBF神經網絡的LSMC控制器的機械手各關節的跟蹤性能都遠遠超過1 s。在逼近性能方面,比較圖4和圖7,采用RBF神經網絡的LSMC控制器的機械手也沒有采用RBF神經網絡最小參數的TSMC控制器的機械手的逼近速度快。可以證明本文所設計的控制器在各關節位置跟蹤、速度跟蹤及其逼近未知參數性能方面均優于前者。
5 結語
本文提出的基于RBF網絡最小參數學習法的機械手終端滑模控制方法,不依賴于機械手的精確數學模型,當機械手的結構和參數不能確定或者未知時,仍然能保證機械手系統具有良好的跟蹤性能。采用改進的終端滑模面,既避免了一般線性滑模面,不能再有限時間收斂的問題,又避免了終端滑模的奇異問題;用一個單一的參數來代替神經網絡的權值,簡化了自適應算法,設計了性能優化的控制器;用Lyapunov理論證明了該算法的穩定性,并且用仿真的方法驗證了算法的正確性、有效性和優良性。在本文的基礎上,我們今后在以下方面進一步研究:我們會進一步的優化算法,并應用到機械手實體上,不斷地提高該算法控制機械手實體的精度、速度和準確性。
[1] Igelnik B,Pao Y H,LeClair S R,et al.The ensemble approach to neural-network learning and generalization[J].IEEE Transactions on Neural Networks,1999,10(1):19-30.
[2] Lee Y,Lee C K.Classification of multiple cancer types by multicategory support vector ma chines using gene expression data[J].Bioinformatics,2003,19(9):1132-1139.
[3] 王艷敏,馮勇,夏紅偉,等.多輸入不確定系統的平滑非奇異終端滑模控制[J].控制與決策,2015,30(1):161-165.
[4] 劉俊龍.機械臂的神經網絡自適應終端滑模控制研究[D].沈陽:東北大學,2014.
[5] 龔發云,袁雷華,湯亮.SCARA機械手的RBF神經網絡自適應軌跡跟蹤控制[J].機床與液壓,2014,42(3):41-46.
[6] F.L.Lewis,C.T.Abadallah,D.M.Dawson.Control of Robot Manipulator[S].New York:Macmillan,1993.
[7] Yoo D S,Chung M J,Bien Z.Real-time implementation and evaluation of dynamic control algorithms for industrial manipulators[J].IEEE Transactions on Industrial Electronics,1991,38(1):26-31.
[8] Liangyong Wang,Tianyou Chai,Fellow,et al.Neural-network-based terminal sliding-mode control of robotic manipulators including actuator dynamics[J].IEEE Transactions on Industrial Electronics,2009,56(9):3296-3304.
[9] 劉金琨.滑模變結構控制Matlab仿真[M].1版.北京:清華大學出版社,2005.
[10] Feng Y,Yu X H,Man Z H.Non-singular adaptive terminal sliding mode control of rigid manipulators[J].Automatica,2002,38(12):2159-2167.
[11] 劉金琨.滑模變結構控制Matlab仿真[M].3版.北京:清華大學出版社,2015.
[12] S.S.Ge,C.C.Hang,T.H.Lee,T.Zhang.Stable Adaptive Neural Network Control[M].Boston,MA:Kluwer,2001. ■
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
