深遠海域漂浮式風電基礎水下安裝機器人的適用性分析
2018-06-28 02:39:30上海電力實業有限公司董渝瑾
太陽能 2018年6期
關鍵詞:作業
上海電力實業有限公司 ■ 董渝瑾
同濟大學機械與能源工程學院 ■ 陸亮* 蔡文琪 烏建中 訚耀保
0 引言
近幾十年來,伴隨科技進步與經濟發展,化石能源作為推動人類活動發展的載體日漸枯竭,而風能因具有較好的經濟性、環保性及可持續性,成為新能源領域國家戰略重要指向及政策扶持對象。圍繞陸地風電和近海風電,國內已形成體系成熟、運作規范的風電市場。但近年來,由于陸地資源日益緊張、風電價格下調等原因,風電技術逐漸轉向風力資源更為豐富、穩定、對環境影響相對較小的深遠海域(離岸〉30 km,水深〉50 m)。深遠海域風電因漂浮式基礎而顯著區別于陸地和近海風電,且其拖航與安裝的工藝、設備及方法與其他二者存在本質區別,原有經驗不具備完全的繼承性。本文結合目前正在開展的上海市深遠海域漂浮式風電示范工程項目,針對擬施工的上海東海海域的水下環境,展開了水下機器人的技術需求論證與分析,以求獲得適用的水下機器人選型依據。
1 水下機器人技術發展簡介
水下機器人是以最小風險幫助人類完成水下作業的先進設備,最早由軍隊開發,用于排除魚雷。1966年,美國海軍生產的世界第一臺遙控型水下機器人“Curv”號于西班牙海域成功打撈起一枚因事故而遺失的氫彈,加速了各國對于水下機器人技術的研發[1]。10年后,海洋開發速度加快,因開發深度超過潛水員下潛深度,水下機器人成為深海開發不可缺少的技術手段。20世紀80年代,世界石油行業衰退導致經濟增速放緩,但因水下機器人在海洋戰略中的重要地位,各國對其的研究開發未曾中斷。1995年,日本自主研發的“海溝號”水下機器人成功下潛至馬里亞納海溝最深處(10991 m),創造了人造深潛器下潛深度的世界紀錄[2]。在下潛能力不斷加強的同時,水下機器人也在朝著智能化的方向發展。伊拉克戰爭期間,美國在伊拉克蓋斯爾港投放使用了新式智能型水下機器人“海神之子”,使原來需要21天完成的排雷工作縮減至16 h。除科研考察、水下排雷、敷設電纜等常規任務外,水下機器人還被用于進行事故殘骸的探測工作,比如,1985年“泰坦尼克”號殘骸位置的發現,以及對于MH370殘骸的打撈,均使用了水下機器人技術[3]。
國內水下機器人研究起步較晚,20世紀70年代末,由沈陽自動化研究所和上海交通大學聯合研制出國內第一臺無人下潛器“海人一號”,受限于當時的條件,其下潛深度僅200 m,但“海人一號”的誕生為國產水下機器人的發展打下了堅實的基礎[4]。1994年,由封錫盛院士主持開發的無纜型水下機器人“探索者號”在三亞成功下水,并下潛至1000 m水深處[5]。2年后,為加快開發海洋資源,作為國家“863計劃”之一的“CR-01”無纜型水下機器人,隨海洋考察隊赴太平洋進行了為期39天的海洋考察任務,歷經數百次下水作業,下潛深度達到了6000 m[6]。此后在“CR-01”的基礎上,我國又相繼開發了“潛龍一號”“海潛二號”“北極ARV”等國產水下機器人,其中“北極ARV”[7]參與了2008年北極科考,獲得了關于北極冰川厚度、海冰形狀等一系列的科研數據。2012年,我國自主研制的“蛟龍號”[8]載人潛水器成功下潛至7062.68 m,并利用機械手完成了水下標本的采集。
綜上所述,水下機器人因實際需求,已開始向更深海域、更復雜功能及更完備人機交互方向發展。就漂浮式海洋工程裝備與風電基礎的施工輔助而言,水下機器人需要具有良好的監測能力,甚至需要進行穩定作業。根據施工需求的不同,水下機器人分為觀測級和工作級。觀測級水下機器人通常配備照明系統、拍攝系統及通信系統,工作級還需配備高性能推進器及機械手[9]。從通信與電力傳輸方式上看,水下機器人還分為有纜型和無纜型。有纜型作業時,先由母船將機器人投放至水中,下潛至一定深度后在定位系統引導下,機器人靠近目標并使用拍攝系統對目標進行近距離識別、拍攝及作業,完成作業后,操縱水下機器人回到母船附近水域,通過回收系統進行回收[10-11]。無纜型水下機器人通常用于勘測,在下水前向其控制器輸入巡航軌跡,在巡航結束回收后再對其進行數據采集。由于無纜型水下機器人在巡航途中無法得到電源補充,因此,盡管其運動范圍較有纜型更大,但續航能力較差,一般不用于監測與作業輔助。
隨著海洋開發的快速發展,水下機器人產品大量涌現。除加拿大Shark Marine、荷蘭Fugro及美國Oceaneering等歐美企業外,近年來,我國也出現了如RobotFish、深之藍等生產水下機器人的公司,對市場技術也有較大貢獻。表1為水下機器人主流產品的技術參數,針對海洋作業需求,水下機器人技術參數主要包括推進器、照明、通信及有無機械手等,這些參數與作業實際工況密切相關,欲獲得合理選型,需結合實際海域情況及作業需求進行詳細地論證分析。
2 基礎安裝與水下機器人功能需求分析
現有商用的漂浮式風電項目僅有已于2017年投入運營的Hywind項目。此項目位于緯度較高的歐洲海域,無長距離大江大河匯聚,水中的浮游生物及藻類少,水體自身透明度較高;同時地勢平緩且海床穩固,樁基安裝二次泥沙渾濁程度低。
本文所述的上海市深遠海域漂浮式風電示范工程項目擬開展海域位于溫帶海域緯度較低的東海佘山島附近,離岸800~1000 m,水深40 m左右;浮游生物、藻類易繁殖,水體自身透明度不高;同時長江水系流入,泥沙俱下,造成水體透明度差、水下可見度低等水下作業難題,對水下機器人選型設計提出了更高要求。
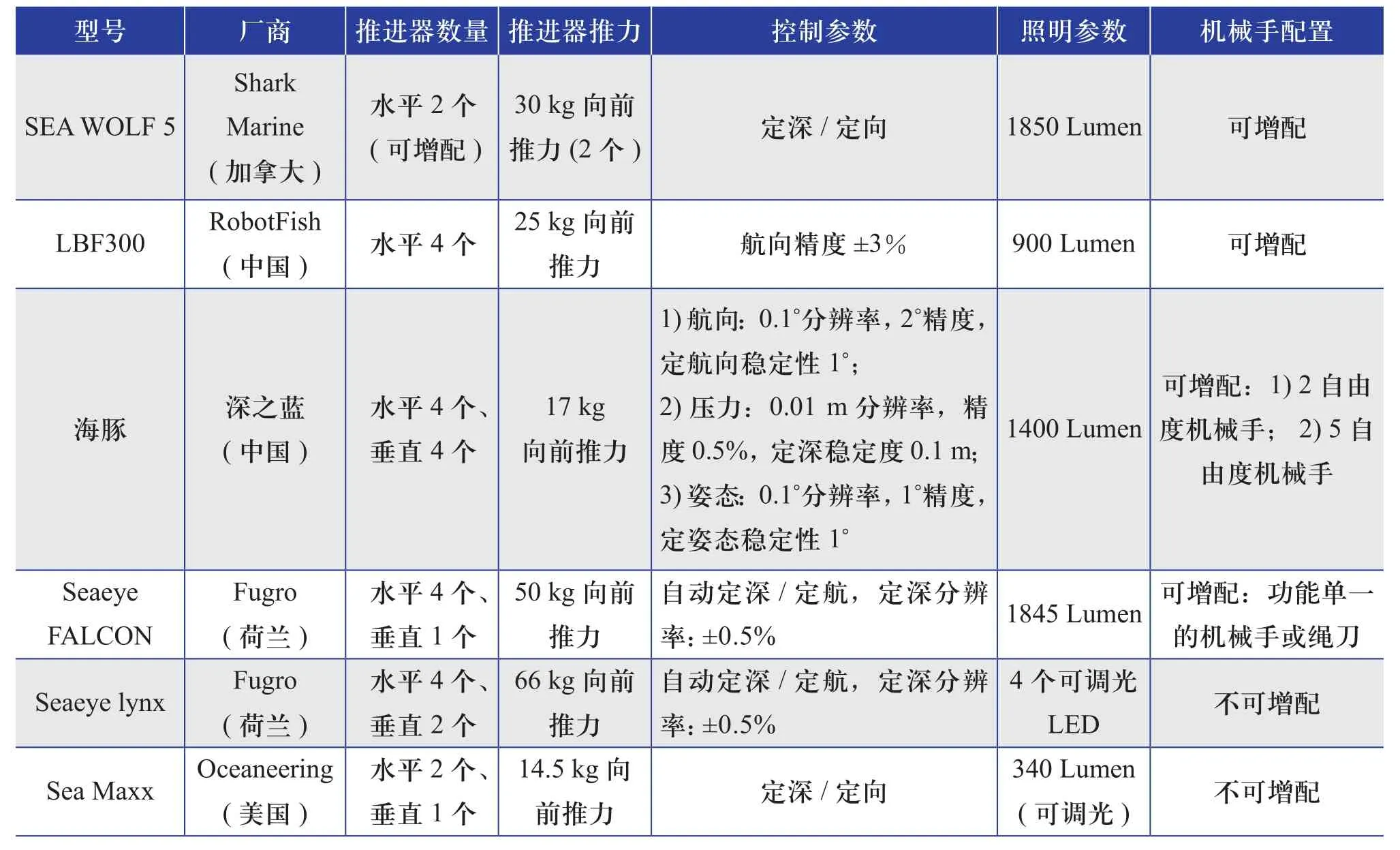
表1 水下機器人主流產品與技術參數
在對水下機器人具體功能參數做進一步篩選之前,首先要了解基礎的拖航與安裝流程,才能確定水下機器人的功能選項。就目前本項目40 m左右的水深而言,理論上,張力腿(TLP)式和半潛(Semi-Sub)式都可作為本項目實施的基礎形式,但從風機基礎一體化設計及服役過程的運維調控角度考慮,目前選擇TLP式為主要研究對象。
圖1給出了TLP式漂浮式基礎拖航與安裝的初步設想。首先,將風機與基礎拖運至碼頭,完成組裝后進行吊裝;在駁船貼近風機后,使用駁船上的固定裝置將駁船與基礎進行系固;完成固定后,拖船將風機整體拖航至指定安裝地點;在指定地點完成進點后,待駁船松開基礎后進行筋腱安裝;駁船脫離,安裝完畢。
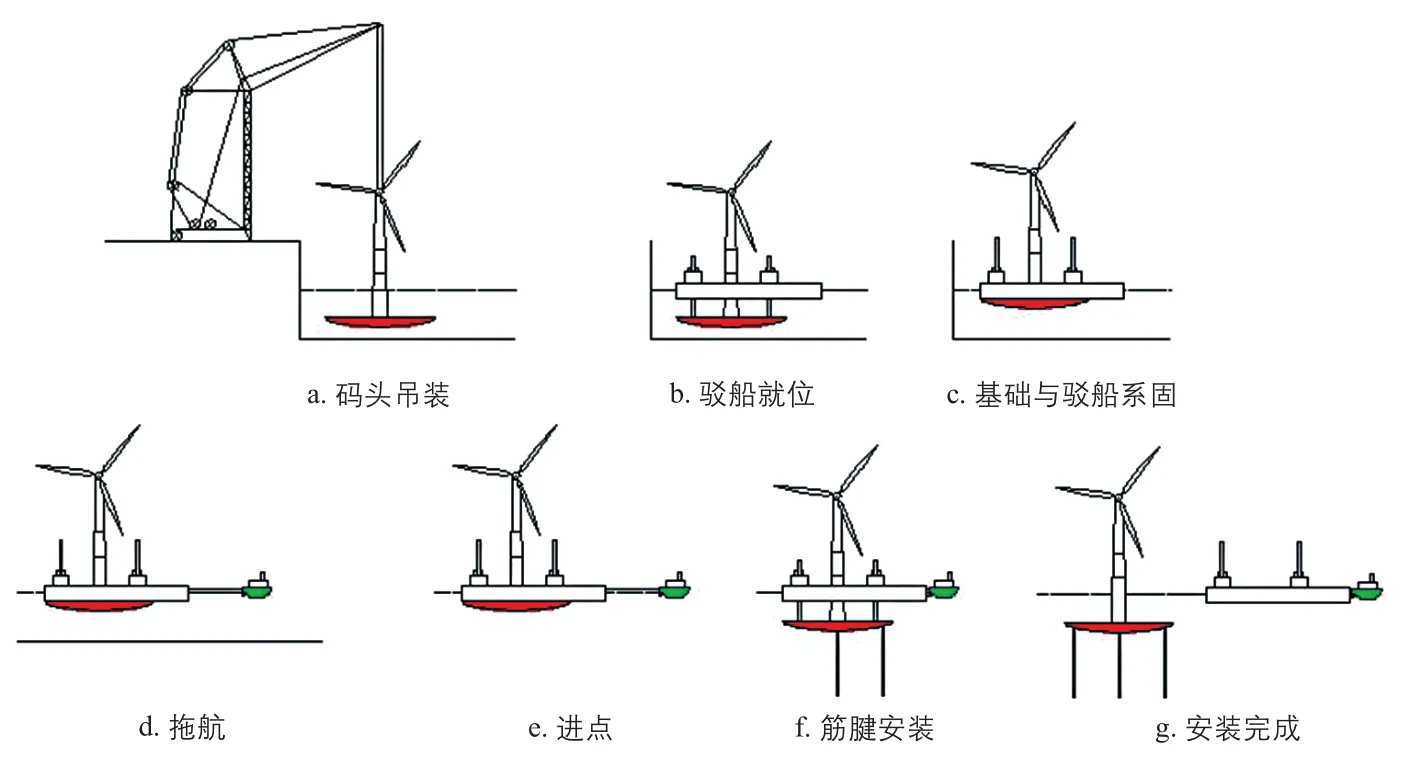
圖1 本項目擬采用的施工與安裝流程
就目前設想的拖航與安裝流程而言,在駁船就位及其與基礎系固的過程中(見圖1b及圖1c),可能需要使用水下機器人,且主要為觀測級監測,也可以采用其他定位方式而不使用水下機器人。在筋腱安裝環節(圖1f)若采用水下機器人,則可大幅簡化安裝裝置與工藝要求。
圖2為某石油平臺TLP基礎筋腱水下連接過程與機器人輔助示意圖[12-13]。如圖2所示,首先進行沉樁(圖2a);然后在指定地點進行打樁(圖2b);將樁基打至固定深度后進行下連接部分樁套的安裝(圖2c);待筋腱部分在施工船上完成連接后,將其與樁基進行連接(圖2d);完成下連接部分后,將基礎部分拖至點位(圖2e);之后對基礎進行壓載,使其沉至指定深度(圖2f),完成與筋腱部分的上連接。在此過程中,水下機器人不僅通過監測功能配合了安裝過程中的定位,也協同進行了輔助作業。

圖2 筋腱安裝過程[12-13]
基礎、筋腱的安裝過程中,需要使用水下機器人對樁基連接、筋腱連接進行監控;而在監控過程中,需要保證監控畫面的實時性及平穩度。基于此,提出對水下機器人的需求在于水下監控的位姿控制、可視化清晰度及40 m深度通信的實現方式。
3 水下機器人論證選型
3.1 位姿控制
水下機器人在水下觀測或作業時,受海流影響易失穩甚至抖動,因此,位姿控制十分重要。根據國家海洋局東海分局及國家海洋監測中心的數據顯示[14],上海市佘山島附近水深30~40 m的水域,海流平均速度為0.5節左右,一年中大部分時間為西南流。
就TLP基礎水下連接而言,機器人在筋腱連接及灌漿過程中的監視或作業需保持穩定,而海流沖擊,甚至臍帶纜效應,均能影響機器人的穩定位姿。穩定位姿與推進器的動力及其分布密切相關。就動力大小而言,機器人需要抵抗海流的沖擊[15],其中最主要的是抵抗水平方向上的海流。表2基于項目所在海域的海流情況,綜合分析了海流產生的水平阻力和各水下機器人相應的推力數據,數據顯示,表2所列產品均滿足水平動力要求。

表2 機器人動力參數
另外,推進器的布置對穩定性的影響也十分關鍵。推進器的布置通常分為水平方向分布與垂直方向分布。水平方向上的主流形式為4個推進器前后分布,實現平移運動控制;針對目前工況,應該還需要轉向動作,因此搭配可旋轉推進器,可使機器人在保持穩定的同時更為靈活的調整位姿。而在垂直方向上,布置過多的推進器會產生相互影響[16],因此布置1~2個推進器為宜。表2中,Fugro公司Seaeye lynx與Seaeye FALCON兩款產品在擁有較大的單位質量下前進推力的同時,還滿足機器人推進和旋轉的復雜功能需求,因此,這兩款產品在位姿控制方面的優勢較大。
3.2 水下監控
海底環境對機器人視覺的影響中,濁度為主要影響因素。按照國際標準化組織ISO的定義,濁度是由于不溶性物質的存在而引起液體的透明度降低的一種量度[17]。不溶性物質是指懸浮于水中的固體顆粒物(泥沙、腐殖質、浮游藻類等)和膠體顆粒物。水的濁度反映了水的光學性質,表示水中懸浮物和膠體物對光線透過時所產生的阻礙程度。濁度的大小不僅與水中懸浮物和腔體物的含量有關,而且與這些物質的顆粒大小、形狀和表面對光的反射、散射等性能有關。據資料顯示[18],本項目施工海域水體濁度與深度分布情況如表3所示。由表3數據可知,施工地點海水的濁度隨深度的增加而急劇惡化。
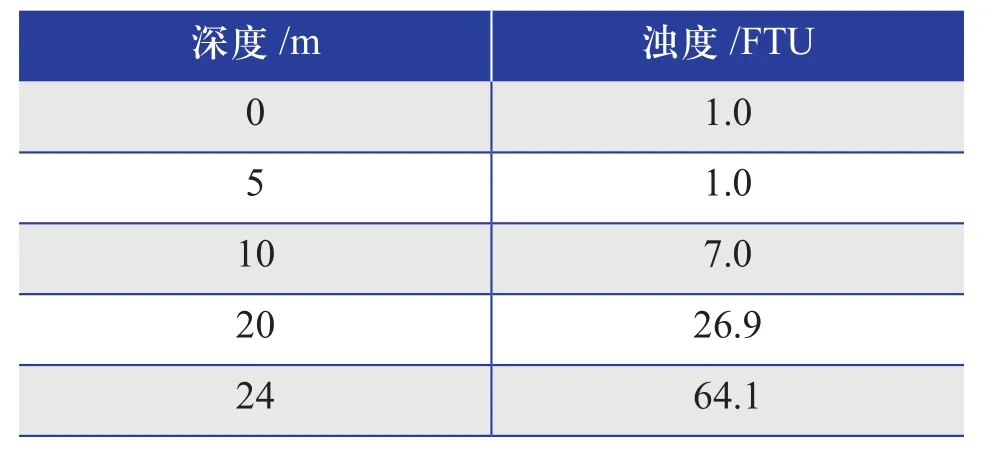
表3 本項目施工海域水體濁度與深度對照表[18]
可見光中,由于海水對藍綠波段的可見光吸收損耗極小,因此藍綠光通過海水時,不僅穿透能力強,而且方向性極好,所以,選擇以藍綠光為依據,研究濁度對于可見光的影響。查閱相關資料可知[19],在13.23 FTU下,藍綠光的衰減系數為4.33 m-1(即傳輸長度為1/4.33 m),而施工水深的濁度超過64.1 FTU,其衰減系數倍增。由此可見,其他可見光在海水中面臨比藍綠光更加嚴重的衰減。因此,進行水下監控時,需要感光度較低的攝像頭,同時需配備照明設備。
綜上所述,能夠兼容低感光鏡頭、高照度照明系統的水下機器人較適用于本項目。表1中的SEA WOLF 5、Seaeye FALCON、Seaeye lynx及Sea Maxx均符合此項要求。
3.3 數據通信
本項目需對基礎下沉及水下連接進行連續、實時的監測,相應的通信手段不僅要有足夠的傳輸速度,還需在水下環境保證數據的有效性和穩定性。現有水下通信主要分為有線通信與無線通信兩種[20],其中無線通信又包括光波通信、電波通信和水聲通信。
光波通信是以光作為載體傳輸信號,因此其對水體清澈度要求較高。本項目位于東海海域,水體較為渾濁,透光性較差,故光波通信不易實施。
電波在水中傳輸時能量衰減較為嚴重[21],且衰減隨頻率的增加而加大,無法適用項目工況。
水聲通信是無線通信領域中最為復雜的一種方法,以聲波作為載體傳輸信號。相比前兩種通信方式,水聲通信的優點在于衰減較低;但聲波傳播受海洋波浪起伏、海水介質的非均勻性影響,易產生散射、折射效應,導致信號缺失[22],穩定性較差。此外,水聲通信數據傳輸速度也無法滿足本項目要求,現有技術手段在理想環境下只能達到20 kbps,但項目所需監控攝像碼率至少要在400 kbps以上,難以有效實施。
相比于無線通信,有線通信成本低廉且安全可靠,使用臍帶纜直接與水下機器人相連,是目前常用的通信手段,其活動范圍主要受限于臍帶纜的長度,而現有的臍帶纜技術可達到的最大深度為2743 m[23]。本項目施工作業水深約40 m,且對水下機器人活動范圍的要求不高,因此有線通信技術更為適合。表1中列舉的水下機器人均符合使用要求。
3.4 電力傳輸
從電力傳輸方式進行分類,水下機器人分為有纜型與無纜型。無纜型可減少纜繩對機器人的束縛,提升活動范圍和自由度,但現有的儲電技術水平導致機器人個體龐大,岸上配件較多。而有纜型機器人由電纜連接,在滿足數據傳輸要求的前提下,可將電纜整合至臍帶纜中。盡管臍帶纜效應會影響機器人水下動作[24],同時需要搭配成套的臍帶纜回收系統(包括導向機構、牽引絞車、儲存絞車等[25]),但如前文所述,本項目施工作業水深約40 m,且對水下機器人活動范圍要求不高,因此,有纜電力傳輸方式更為適合。表1中列舉的水下機器人均符合使用要求。
3.5 有無機械手
就目前設想的拖航與安裝流程而言,在駁船就位及其與基礎系固過程中,可以使用觀測級水下機器人;在筋腱安裝環節,采用水下機器人可大幅簡化安裝裝置與工藝要求。事實上,根據本文研究團隊以往的經驗,可不采用水下機器人,也可僅采用觀測級水下機器人,當然也可采用作業級水下機器人,整體方案的選擇除了考慮安裝設備與工藝,以及機器人本身的技術條件外,也要綜合考慮項目成本等各方面的因素。但無疑的是,采用水下機器人,可降低工裝與工藝的要求、復雜度和安裝成本。
3.6 綜合分析
本文對水下機器人的論證分析,旨在為項目的實施提供思考。事實上,除了上述功能需求外,水下機器人對密封性、抗壓性等同樣存在功能指標點的考慮。而從本項目水深約40 m的環境來看,表1中所列水下機器人在密封與抗壓方面均能滿足要求,故不再贅述。
由此,基于項目拖航安裝工況及海洋環境情況,對比分析水下機器人需求與現有技術,逐項分解指標,在不同的功能參數選項上,分別有不同的水下機器人產品滿足要求,具體情況如表4所示。綜合考慮后,Fugro公司的Seaeye FALCON和Seaeye lynx兩款水下機器人滿足主要功能指標;觀測級首推Seaeye lynx,而作業級首推Seaeye FALCON。
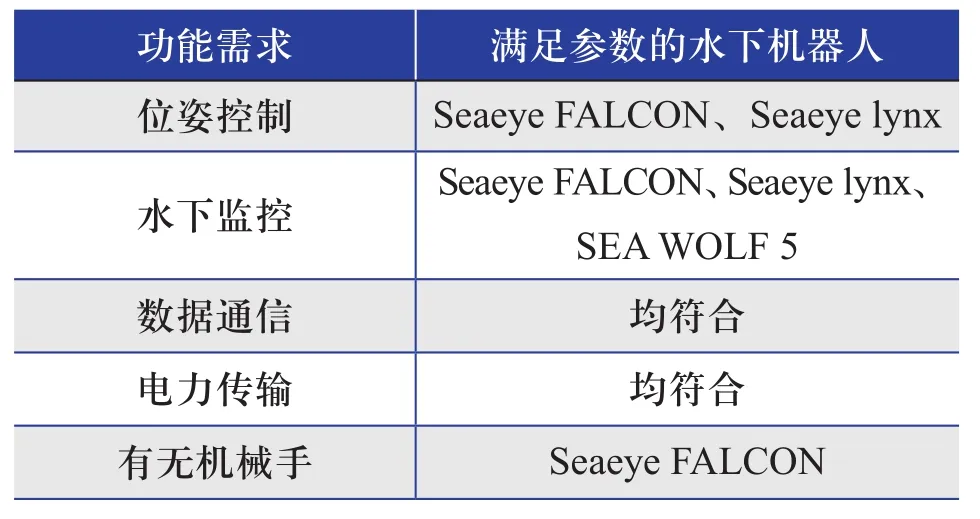
表4 水下機器人需求與現有技術對比分析表
Seaeye lynx觀測級水下機器人,擁有高性能推進器,為“水平4個、垂直2個”分布,滿足位姿調整要求;推進器產生的水平推力為2.6 kN、垂直推力為1.3 kN,性能足以抗海流沖擊;水下配備了3個攝像頭,其中1個為低感光鏡頭,同時配備可調光LED(即其照明能力可調整以適應水下環境),水下攝像功能搭配可旋轉云臺,增加了機器人在水下的視野范圍;使用無浮力臍帶纜,配備了一套完整的投放回收系統,擁有良好的拓展性能;整體為框架式結構,元器件大部分位于耐壓殼體中,殼體由聚丙烯與不銹鋼構成,質量輕且耐壓性、密封性較好。
必須注意的是,Seaeye lynx水下機器人不支持拓展機械手臂,同時該型號水下機器人重200 kg,比其他型號更重,薄弱環節部分(如推進器與框架的連接部分)的密封性尚待考慮。但其性能在觀測級水下機器人中已屬翹楚,因此,如果本項目首推觀測級,則Seaeye lynx較為適合。
4 總結
目前風電技術正逐漸轉向深遠海域尋求發展的空間,風機基礎從固定式變為漂浮式,水下連接裝備、工藝與方法需要新的手段。尤其針對漂浮式基礎的水下安裝,需要水下機器人的視覺輔助,甚至機器人作業輔助。本文基于正在開展的上海市深遠海域漂浮式風電示范工程項目,結合風電安裝海域水體與氣候條件,以及基礎水下安裝作業需求,從位姿控制、水下監控、數據通信、電路傳輸和有無機械手5個角度,論證分析了現有水下機器人的技術選型依據和方法,為項目的具體實施提供了技術儲備。
水下機器人的監測功能可大幅提高水下安裝定位精度,并簡化糾錯方式,減少預制定位結構復雜程度,對項目的有效開展具有很大的幫助;而水下機器人的輔助作業功能同樣可以在一定程度上簡化安裝流程。但整體方案的選擇除了考慮安裝設備與工藝,以及機器人本身技術條件之外,也要綜合考慮項目成本等各方面的因素。
[1]馬繼安, 維維.ROV在深海工程中的應用[J].海洋與海岸帶開發, 1989 , (1): 77-78.
[2]茅及愚.“海溝號”潛入萬米海底[J].機器人技術與應用,1996, (2): 24-25.
[3]王雷, 陳世海, 汪有軍, 等.從馬航MH370事件看救撈系統深遠海搜尋和打撈能力建設[A].第八屆中國國際救撈論壇[C].中國上海, 2014: 148-151.
[4]王去偽.潛水器在海洋水下作業中的應用[J].海洋科學,1989, (4): 71-72.
[5]任平.我國“探索者號”機器人研制成功[J].教師博覽,1995, (6): 43.
[6]佚名.6000米水下機器人從太平洋凱旋歸來[J].機器人技術與應用, 1997, (6): 25.
[7]程風.“北極ARV”遙控水下機器人[J].共產黨員月刊,2009, (1): 53.
[8]譚民, 王碩.機器人技術研究進展[J].自動化學報, 2013, (7):963-972.
[9]PATIRIS I.ROV, Remote Operated Vehicle [D].Helsinki:Helsinki Metropolia University of Applied Sciences, 2015.
[10]趙羿羽.有纜遙控水下機器人發展簡介[J].船舶物資與市場, 2017, (4): 39-42.
[11]封錫盛.從有纜遙控水下機器人到自治水下機器人[J].中國工程科學, 2000, (12): 29-33.
[12]Youtube.TLP installation [EB/OL].https://www.youtube.com/watch?v=cgn-7vc_gjs r f, 2013-11-28.
[13]Youtube.Full story of Hywind Scotland–world’s first fl oating wind farm[EB/OL].https://www.youtube.com/watch?v=P UlfvXaISvc & t=200s, 2017-10-17.
[14]國家海洋局東海分局.2016年東海區海洋環境公報[R].國家海洋局東海分局, 2017.
[15]范士波.深海作業型ROV水動力試驗及運動控制技術研究[D].上海: 上海交通大學, 2013.
[16]張相聞, 王磊, 李振江, 等.錨泊輔助動力定位推進器布置方式分析[J].實驗室研究與探索, 2013, (10): 7-10, 72.
[17]伍培.水濁度的現代定義、表達和測定[J].重慶石油高等專科學校學報, 1995, (1): 51-53.
[18]翟世奎, 張懷靜, 范德江, 等.長江口及其鄰近海域懸浮物濃度和濁度的對應關系[J].環境科學學報, 2005, (5): 693-699.
[19]丁琨, 黃有為, 金偉其, 等.水下藍綠激光傳輸的衰減系數與水體濁度關系的實驗研究[J].紅外技術, 2013, (8): 467-471.
[20]王毅凡, 周密, 宋志慧.水下無線通信技術發展研究[J].通信技術, 2014, (6): 589-594.
[21]馮振興.基于CDMA的水下傳感器網絡MAC協議設計[D].西寧: 青海師范大學, 2014.
[22]賈寧, 黃建純.水聲通信技術綜述[J].物理, 2014, (10):650-657.
[23]郭宏, 屈衍, 李博, 等.國內外臍帶纜技術研究現狀及在我國的應用展望[J].中國海上油氣, 2012, (1): 74-78.
[24]FANG M C, HOU C S, LUO J H.On the motions of the underwater remotely operated vehicle with the umbilical cable effect [J].Ocean engineering, 2007, 34 (8): 1275-1289.
[25]陳育喜, 張竺英.深海ROV臍帶纜絞車設計研究[J].機械設計與制造, 2010, (4): 39-41.
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
