某操縱系統致命誘發振蕩問題的解決
2018-06-25 08:32:30張曉光劉麗慧
裝備制造技術 2018年4期
關鍵詞:信號
張曉光,劉麗慧
(航空工業沈飛集團公司,遼寧沈陽110850)
現代飛行器的電傳操縱系統設計具有重量輕、操縱性能好等諸多的優點,可為本來不穩定的飛行器提供預期的人工穩定性。但是,在消除系統設計不穩定因素并提高操縱性能時往往低估了電傳操縱系統帶來的副作用,如飛行器的誘發振蕩,該隱患不是在設計時能理想化消除的,必須經過大量的實驗及空中試飛才可以真正找出隱患所在并加以解決。
誘發振蕩是近年來采用電傳操縱系統設計而普遍關注的問題,試飛員的操縱過猛,加上系統的增益過高,容易導致操縱面或偏轉速率達到極限,這種飽和現象會引起控制滯后變大,從而造成飛行器不穩定,當試飛員不能有效地采取措施來抑制這種振蕩現象時就會導致不可想象的誘發振蕩事故。
1 現象及機理分析
1.1 現象描述
某飛行器空中大角度試飛操縱,左壓駕駛桿到極限位置時,左/右側襟副翼舵面出現較明顯的、持續抖動,促使飛行器誘發振蕩,試飛員改平后飛行器穩定振蕩現象消失。飛行器落地后地面模擬左壓駕駛桿到極限位置時,左/右側襟副翼舵面出現較明顯抖動,駕駛桿至其他位置時不存在襟副翼抖動現象。
1.2 機理分析
某電傳操縱系統為數字式全權限三軸四余度設計,取消了機械連桿操縱部分,系統設計有應急模式,當故障時由應急模式參與飛行器操縱控制。橫向設計機理邏輯圖如圖1所示。
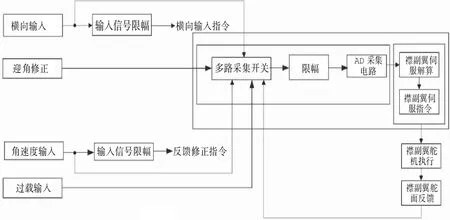
圖1 橫向通道工作邏輯圖
經上圖分析可知,襟副翼通道工作邏輯是:首先電傳計算機模塊采集各傳感器的輸入,信號經多路采集后進行限幅處理及AD轉換,伺服模塊將各信號處理后形成舵面工作的伺服指令輸出,舵面執行機構按不同的偏轉指令偏轉至期望位置,各反饋傳感器將實際位置反饋給計算機最終形成閉環控制[1]。
1.3 數據采集分析
地面監控左壓駕駛桿到極限位置時,通過測試設備采集發現,當橫向桿位移傳感器輸入信號經處理為直流輸出并達到12.8 V及其以上時,襟副翼差動指令存在峰值約0.4 V的跳變,其他信號無明顯跳變。
正常情況下AD采集數據波形與異常情況數據波形對比如圖2、圖3所示。
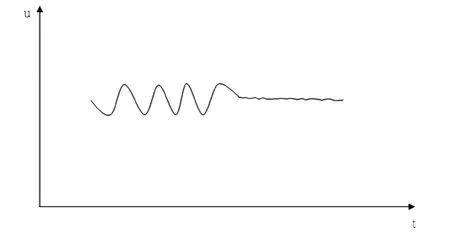
圖2 正常波形
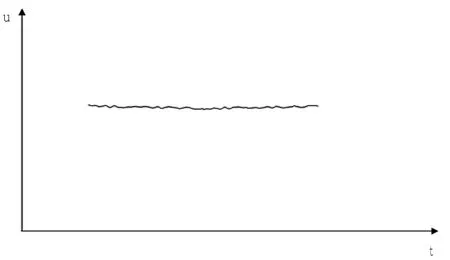
圖3 異常輸入波形
2 原因定位
經測試,正常情況下AD轉換器輸入端波形如圖2,當橫向桿位移傳感器輸入信號經處理為直流輸出并達到12.8V及其以上時,波形如圖3所示。此時,測試設備監控其他傳感器采集不存在波動現象,且橫向桿位移傳感器輸出信號不存在任何紋波。這表明經計算機處理的襟副翼偏轉的橫向桿位移指令存在波動,從而導致舵面抖動。
2.1 板卡測試結果
計算機內板卡組成包括:模擬信號輸入處理線路、跟隨電路、多路采集開關、采樣保持、AD輸入限幅電路、AD采集電路。
針對板卡的內部組成列出故障排除故障樹如圖4所示。
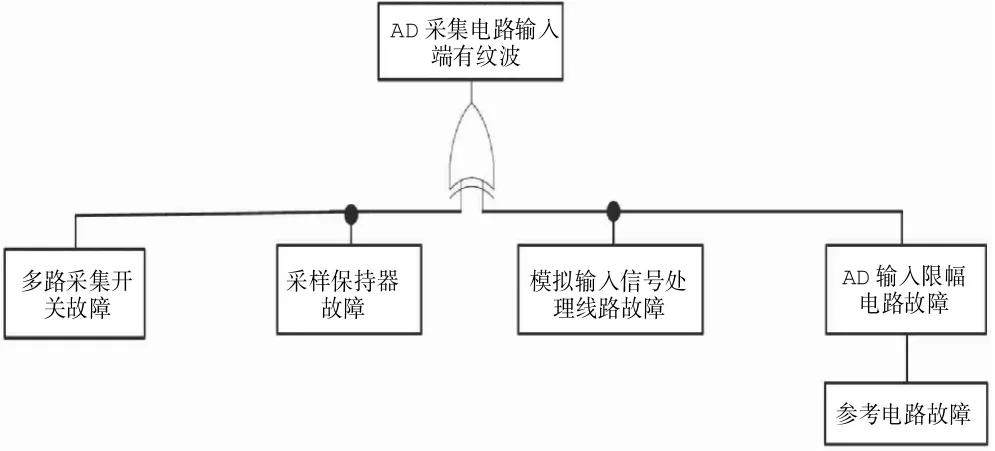
圖4 故障樹
經測試驗證板卡輸入信號限幅電路在輸入電壓大于10 V時正向二極管會產生紋波,引起該紋波的原因為電路中二極管導通帶來的附加相移,從而使得大于10 V時信號發生自激振蕩。
2.2 運放產生自激的原理
反饋放大電路閉環放大倍數(增益)的一般表達式為:
A˙為開環放大倍數;F˙為反饋系數。從上式可知:當 1+F˙A˙接近 0 時,A˙f= ∞. 這說明即使無信號輸入,也有輸出波形,這就產生了自激振蕩。
放大電路的放大倍數和相位偏移隨頻率而變化。當頻率變高或變低時,輸出信號和反饋信號將產生附加相移。若附加相移達到±(2n+1)π,則反饋信號與輸入信號同相,負反饋電路變成正反饋,反饋信號加強。當反饋信號大于凈輸入信號時,即使去掉輸入信號也有信號輸出,產生了自激振蕩,即
在|A˙F˙|>1 時,更加容易產生自激振蕩。如自激條件中任意一條不成立,自激就不會產生[2]。
2.3 故障定位
在模擬信號輸入處理線路信號≥10 V時,輸入信號限幅電路的正向二極管導通。此時,+10 V跟隨電路的負載特性發生變化,由于發生變化負載的附加相移影響,致使反饋信號與輸入信號同相,從而滿足了產生自激振蕩的條件ΔφA+ΔφF=±(2n+1)π.
綜合以上分析,因自激產生條件全部滿足,故引起了+10 V跟隨電路中運算放大器的自激振蕩。
3 采取措施
自激振蕩是運算放大器電路設計中的一種較難避免現象,由于采用集中參數模型,自激振蕩尚不能通過仿真的手段驗證。自激振蕩一旦產生表明該電路符合引起自激產生的條件,自激電路不是設計特性,只能從后期測試試驗中發現。自激振蕩普遍采用的消振方法為相位補償法,即通過外加一些元件來校正放大器的開環頻率特性,破環自激振蕩條件,以保證閉環穩定工作。
由運放電路可知,在輸入信號限幅電路正向二極管中串聯電阻,使跟隨電路變為差分電路,并改變負反饋放大電路的反饋系數

使|A˙F˙|=1.41 × 0.5=0.705 < 1,能有效地抑制自激振蕩的產生,從而消除信號的波動[3]。
4 試驗驗證
經驗證在貫徹更改措施的輸入信號限幅電路正向二極管導通的情況下觀測其波形,結果均如圖2所示的正常信號輸出波形,實際監控AD采集讀數不再發生跳變。
5 結束語
引起該襟副翼舵面抖動的原因是由于計算機內板卡電路中跟隨器運放自激振蕩引起的模擬輸入信號跳變所致。在板卡的硬件限幅電路上由于容性負載帶來的附加相移作用使得負反饋變為正反饋,從而導致運放發生自激振蕩。通過將跟隨電路改為差動放大電路,可有效地避免引發自激振蕩產生的條件,最終故障得以徹底消除。
誘發振蕩對飛行器操縱是有致命影響的,甚至是飛行事故在國內外也是有例可查的。通過對該故障的分析,說明誘發振蕩現象只有在特定的條件下才會出現,所以在今后電傳系統試驗及驗證上要充分考慮采取有效的措施避免該問題的發生,同時適當增加試飛驗證,并制定有效的措施抑制誘發振蕩。
[l]宋翔貴,張新國.電傳飛行控制系統[M].北京:國防工業出版社,2003.
[2]吳文海.飛行綜合控制系統[M].北京:航空工業出版社,2007.
[3]張德發,葉勝利.飛行控制系統的地面與飛行試驗[M]北京:國防工業出版社,2003.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
