基于LabVIEW的航空發動機轉子故障診斷系統
2018-06-24 03:02:10劉振峰楊偉新
設備管理與維修 2018年13期
劉振峰,楊偉新
(中國航發湖南動力機械研究所,湖南株洲 412002)
0 引言
航空發動機故障診斷要求做好故障定位準確快速,以方便后續的維修;另外,故障的診斷還可以對發動機的實際運行狀態進行記錄與判斷,方便后續的繼續使用,確保發動機始終處于安全狀態[1]。
EMD分解可將信號分解為多個IMF(Intrinsic Mode Function,本征模態函數)分量與一個趨勢的代數和,適用于非線性、非平穩信號分析。基于EMD理論,以LabVIEW為開發平臺,設計并開發出一套功能完善的航空發動機故障診斷系統。
1 彈支動應力測試技術
在彈支水平與垂直方向的彈條上粘貼應變片。彈支自由端徑向位移與彈支彈條的應變量的關系見式(1)[2]。式中Y為彈支自由端的徑向位移;l為彈條長度;ε為彈支彈條的應變量;h為彈條厚度。根據式(1),彈支自由端徑向位移與彈支彈條的應變量成正比。根據彈條的因變量(動應力信號)可監測發動機轉子的故障。

發動機轉子系統發生故障時,因受到剛度的非線性、油膜間隙及載荷變化等因素的影響,彈支的動應力信號必然呈現出非線性、非平穩特性[3],另外,由于測試過程中的噪聲污染,使得通過彈支動應力信號獲取的軸心軌跡形狀復雜,難以辨別出轉子系統的運行狀態。因此,如何從含有背景噪聲且具有非線性、非平穩特性的彈支動應力信號中提取出轉子系統故障特征信息,是航空發動機轉子故障診斷系統的關鍵。
2 EMD基本原理[4]
EMD(Empirical Mode Decomposition,經驗模態分解)分解是將信號分解成多個IMF分量,可表示為式(2)。EMD分解由信號自身的變化決定,是一種自適應信號分解方法,適用于分析航空發動機轉子系統彈支非平穩動應力信號。

3 總體設計
(1)硬件系統設計。硬件系統采用基于數據采集卡的虛擬儀器系統,采用日本共和電業應變計,型號KFH-1-120-C1-11 H1M3,數據采集卡采用美國NI公司的PXI-4471B動態信號采集卡。
(2)軟件構成。軟件的設計是核心部分,LabVIEW語言擁有高級信號分析子函數以及各種儀器驅動程序,用戶只需要將輸入控制、輸出顯示的圖標調出來,就可以完成參數的配置,然后再與程序的框圖連接起來,就可以完成對應的工作[5]。該系統主要由數據采集、數據分析、數據處理及故障診斷組成。
4 系統軟件設計
(1)數據采集模塊。支持工具中,不能缺少數據采集的驅動程序及編程接口,其能夠提供硬件設備與應用層開發工具之間的接口,確保應用層的開發工具能被不同的硬件設備使用[6],NI公司的NI-DAQmx驅動程序,可以與LabVIEW和NI公司的硬件產品無縫結合使用,因此成為選用LabVIEW構建數據采集系統時驅動程序的首選。
(2)數據分析模塊。數據分析模塊可以對在線信號波形進行動態顯示,也能將數據作為文件存儲,方便后續使用。數據分析給出時域與頻域波形,界面主要有數據采集時的日期、時間及經過的時間,另外給出一些參數設置,如分辨率、窗函數、坐標軸顯示方式等,此外還顯示一些主要特征參數,如峰值、均值、有效值等。
(3)數據EMD處理。在Matlad的環境下實現EMD的使用,可將Matlab與LabVIEW結合進行描述[2]。文本語言的可維護性與易讀性比較差,影響軟件后續的調試。針對EMD工具箱缺少EMD算法問題,對LabVIEW進行二次開發[7],EMD分解方法部分程序框圖如圖1所示。
5 應用實例
某型航空發動機轉子振動信號通過安裝在發動子轉子柔性支承-彈支彈條上的應變片采集[3],采樣頻率10 kHz。轉子轉速42 770 r/min。從時域圖(圖2)和頻譜圖(圖3)很難判斷轉子出現何種故障。
直接進行故障信號EMD分解,基于其各個分量信號特性,通過4個分量的分解,采樣點數為1024.其中,信號最高頻成分
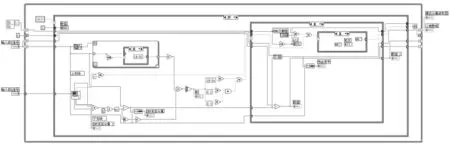
圖1 EMD分解程序框圖
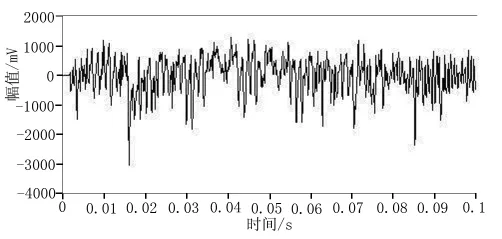
圖2 時域波形圖
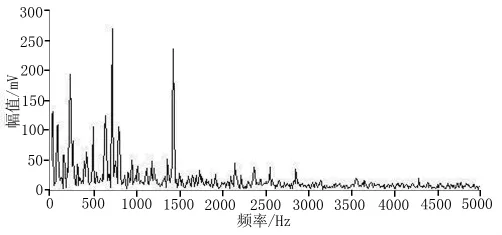
圖3 頻域波形圖
6 結語
基于LabVIEW的航空發動機轉子故障診斷,目前主要是將計算機軟硬件技術、非平穩信息處理技術以及應變片測試技術進行綜合運用,然后在齒輪箱故障診斷中直接的使用虛擬儀器技術,可以滿足振動信號的采集與處理要求,進而將故障診斷的精度提高,縮短系統開發周期,降低硬件維護費用。通過實驗證明,基于這種方式的故障診斷系統,工作穩定可靠,能滿足在線與離線的故障分析,可以快速準確地診斷發動機轉子出現的故障。為INF1呈現出來的信息。EMD分解如圖4所示。
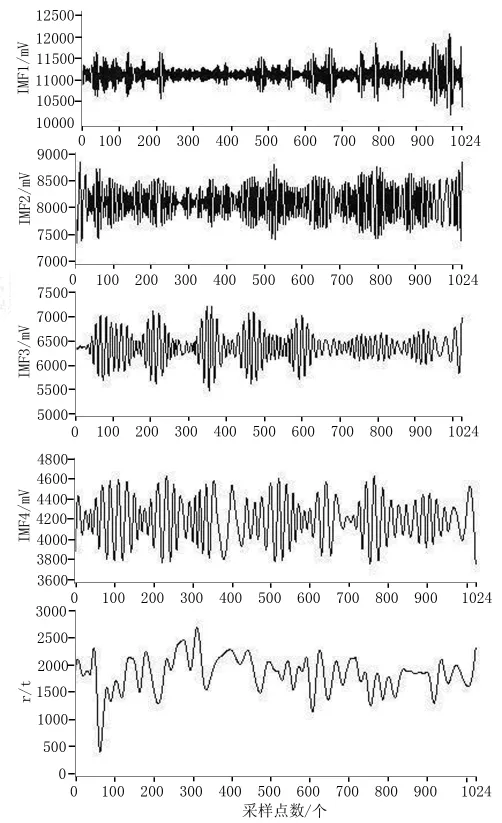
圖4 故障信號EMD分解圖
在主頻f=712.89 Hz(折合轉速為42 770 r/min)左右兩邊分別出現f1=628.66 Hz和f2=797.12 Hz的邊頻帶。又因f-f1=f2-f=84.23 Hz,根據文獻[8],可以判斷轉子的故障為動靜碰摩故障。該實例驗證了轉子故障診斷系統的有效性。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
汽車與新動力(2015年1期)2015-02-27 12:11:01
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31
河南科技(2014年3期)2014-02-27 14:05:48
