風電機組塔筒連接螺栓檢修機器人結構設計
2018-06-22 07:53:34崔家平李贏正吳若虞肖東碩馬鐵強
重型機械 2018年3期
崔家平,李贏正 ,楊 潔,吳若虞,肖東碩,馬鐵強
(1.沈陽工業大學 電氣工程學院,遼寧 沈陽 110870;2.沈陽工業大學 新能源研究院,遼寧 沈陽 110870;3.沈陽工業大學 機械工程學院,遼寧 沈陽 110870)
0 前言
隨著清潔能源的迅速發展,風力發電在我國所有發電方式中占比越來越大,截止2016年,中國風電機組總裝機容量已達到1.69億千瓦,風力發電已成為我國第三大類型電源。預計到2020年底,風電機組累計并網裝機容量將達到2.1億千瓦以上。而隨著近年來我國裝機規模不斷擴大,風電機組設備的檢測維修問題也愈顯突出。
關于維修成本方面,根據歐洲風能協會的統計,陸地風電機組每千瓦時發電量的運行維護費用占總生產成本的20%~25%,對于海上風電場,其運行維護費用高達35%;關于運行安全方面,長期工作在野外的暴曬和雷雨等惡劣環境中的風電機組,其連接件損壞率高達40%~50%,一旦其關鍵連接件發生扭斷,會使設備損壞、機組停機,嚴重者造成機組崩塌,帶來巨大的經濟損失。由此可知風電機組設備的檢測與維修是一個亟待優化的問題。
近年,在風電機組連接件的檢測維修理論發展中,重慶大學[1]用法蘭連接有限元模擬方法對輪轂主軸法蘭連接螺栓進行建模分析,得到了各工況下螺栓的應力結果,并對比分析了螺栓組的危險截面應力,對危險螺栓處的法蘭連接進行了安全校核;許昌許繼風電科技有限公司[2]針對MW級風機變槳軸承連接螺栓的強度問題,采用周期性建模的方式建立了螺栓的有限元分析模型,并基于GL規范計算了螺栓的極限強度及疲勞強度;太原理工大學[3]基于Schmidtand-Neuper非線性理論,分析了法蘭螺栓連接系統的受載關系,并推導了在葉根法蘭中心彎矩作用下的螺栓工作應力和法蘭中心彎矩之間的關系。以上研究對風電機組連接件的檢修理論分析做出多項貢獻。
然而,在具體風電機組連接件檢修方法中,仍舊依靠工人攀爬風機定檢維修連接件。在此過程中存在許多問題,首先由于人力檢修存在不準確性,操作中可能產生疏忽和錯漏,二是人力維修耗時長、效率低,三是因為風電機組過高,工人檢修具有較大風險與困難。人力檢修的弊端問題至今還未得到有效解決。
本文介紹一款自主研發的風電機組塔筒螺栓檢修機器人,以期其能應用在風電機組塔筒連接螺栓的維修領域,減少人力檢修帶來的不便因素。
1 機器人方案設計
本文介紹的機器人主體由上下近似對稱的兩部分組成,每一部分由三塊功能各異的矩形板構成。為了實現機器人在塔筒內壁法蘭處固定,根據三點固定原理設計了W型加緊結構,該結構在此范圍弧度內可實現無障礙運動,并設計了滑塊與圓弧齒條相結合的前進(交替移動)機構;為了實現力矩扳手在矩形板上適時升降,根據升降機原理,設計了夾持(固定扳手)機構;為了適應在不同曲率的工況,根據曲柄滑塊機構工作原理,設計了機器人的自適應機構,機械功能如圖1所示。
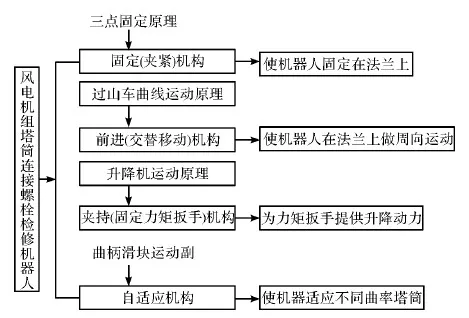
圖1 機器人各部分機械功能
2 機器人結構設計
2.1 固定(夾緊)機構設計
在風電機組塔筒中,由于可供固定的支撐只有塔筒壁、法蘭和塔筒螺栓,可用支撐點較少且形狀不規則,利用三點固定原理,借助塔筒壁和塔筒法蘭兩個支撐,設計出了W型夾緊結構。其中W型的左臂和右臂為彈簧滑桿加滾輪結構,此結構可保證在夾緊狀態時滾輪時刻與塔筒壁接觸且彈簧處于被壓縮狀態,即左臂和右臂與塔筒壁在夾緊狀態時與塔筒壁有較大的力的作用。W型的中心處在夾緊狀態時與塔筒螺栓處接觸。在夾緊狀態時,螺栓對W型中心處的力的方向與塔筒壁對左右臂滾輪的力大小相等,方向相反,則夾緊機構將機器人固定在法蘭上。
如圖2a所示,L形直角臂和滑動直桿組成了W型夾緊結構。圖2b為夾緊狀態,圖2c為松開狀態。當處于夾緊狀態時,滾輪與塔筒壁接觸,兩個L形直角臂交匯處與塔筒螺栓接觸,以此達到固定的作用。背景為風電機組的塔筒壁及其與之相連接的法蘭。
在此結構中提供動力的是12電機,其通過帶有棘輪機構的齒輪將動力傳遞到齒條上,齒條前后運動控制W型開口張角的大小,使得1滾輪接觸塔筒壁或離開塔筒。的作用是當L形直角臂處于夾緊狀態時卡住,以便電機通過棘輪機構向其他機構輸送動力而固定機構仍處于夾緊狀態。
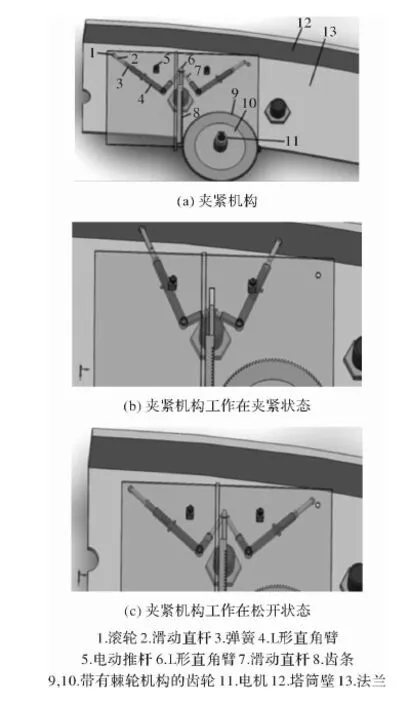
圖2 夾緊機構
2.2 前進(交替移動)機構設計
由于絕大部分風電機組塔筒內部為圓形,為了使得機器人能在圓周環境中進行工作,根據過山車可以在一定范圍內的弧度上無障礙運動以及過山車與軌道的固定方式,設計了本機器人的前進機構。本機器人的滑塊相當于過山車的本體,圓弧齒條相當于過山車的軌道,限位滑輪相當于過山車的車輪,由此可使滑塊與圓弧齒條做沿圓弧齒條的相對運動且不發生其它方向的無關運動。
如圖3所示,前進機構由五個零部件組成。其中滑塊主體與機器人上半部分結構相固定,圓弧齒條與機器人下半部分固定。滑塊主體與滑輪共同構成了完整的一個滑塊,其中滑輪包括上下限位滑輪和左右限位滑輪。電機通過電機支架與滑塊主體連接,電機軸端配合一個齒輪,齒輪與圓弧齒條相嚙合,該齒輪不但可以傳遞轉矩使機器人上下兩部分交替移動,同時還起到了左右限位的作用。
假使機器人下半部分固定在塔筒法蘭處,上半部分保持松開的狀態,此時電機轉動,則機器人上半部分將會相對下半部分發生相對前移,反之,下半部分將會發生前移。上下交替前移,實現機器人周向運動。
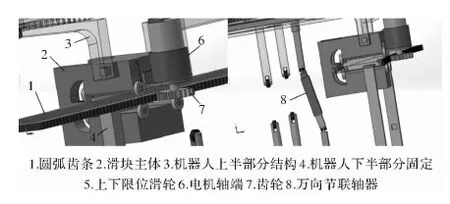
圖3 前進機構
2.3 夾持(固定扳手)機構設計
由于現在市場上已經有較為成熟的力矩扳手,所以只設計了可以搭載力矩扳手的夾持機構,并且根據升降機的原理,設計出了可以升降力矩扳手的夾持機構,以便于力矩扳手可以在適時的場合進行升降。在力矩扳手運行到螺栓正上方時,電動推桿收縮將扳手準確套在螺母上,緊固作業完成后,電動推桿升高,將力矩扳手抬起,進行下一步作業。
如圖4所示,夾持機構由電動推桿和夾具兩個零部件組成,電動推桿為提供升力的動力來源,夾具的作用為夾持力矩扳手,當把力矩扳手放置好以后,上緊夾具的螺栓。當到達塔筒螺栓上方位置時,電動推桿將夾具連帶力矩扳手一起放置到螺母上,進行檢修作業。
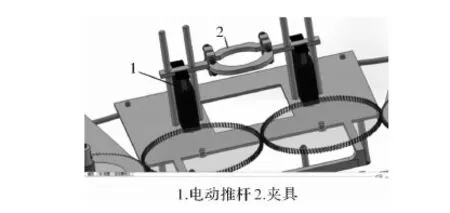
圖4 夾持機構
2.4 自適應(適應不同曲率塔筒)機構設計
由于不同容量的風電機組的塔筒直徑不同,且同一塔筒的直徑也是按照一定比例進行變化的,所以為了適應不同曲率的塔筒,根據三點固定原理原理設計了本機器人的自適應機構。機器人上半部分(下半部分)由三塊主板構成,其中兩側主板分別與中間主板相連且主板兩側邊形成一定角度,角度不同,則適應的曲率也不同,而自適應機構則是用來調節這兩側邊的角度且將這一角度固定在某一值保持不變。
如圖5所示,自適應機構由曲柄和滑塊兩個零部件組成,曲柄和滑塊共同組成了曲柄滑塊機構,其中曲柄與中間的矩形板相連接,滑塊與兩側的矩形板相連接。當曲柄與滑塊的相對位置發生變化時,兩塊矩形板間的角度便也隨之發生變化,以達到機器人適應不同曲率下的風電機組塔筒。
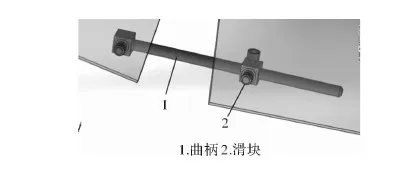
圖5 自適應機構
2.5 整體結構概述及其運動學分析
如圖6所示,機器人由四個固定(夾緊)機構,一個前進(交替移動)機構,一個夾持(固定力矩扳手)機構和四個自適應機構組成。
圖2a中的電機提供四個夾緊機構的動力。電機在正轉時給機器人左上半部分提供動力并通過大齒輪傳遞動力至右上部分(即機器人上半部分都接受到了動力)。當W型夾緊機構到達規定區域內,電動推桿起作用將其卡住,這時,電機便可以進行反轉。反轉時,則通過圖3中的萬向節聯軸器給機器人下半部分提供動力,達到的效果與正轉時相同。
其次,自適應機構與固定在各個主板上的大齒輪能同時作用互不影響,由圖6a可知,大齒輪的分度圓在各個主板連接處相切,一定角度范圍內,兩側矩形板可以和中間矩形板調整其間的夾角以適應不同曲率的塔筒內壁。
如圖3所示,換向機構通過滑塊與機器人上半部分連接,圓弧齒條與機器人下半部分連接,固定在滑塊上的主動輪提供轉矩,使機器人上下兩部分的交替前移,實現機器人在塔筒法蘭上周向運動。
通過以上四個機構之間的相互配合可實現機器人在塔筒法蘭上對螺栓自動檢修的功能。
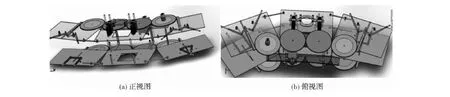
圖6 風電機組塔筒連接螺栓檢修機器人
3 總結
本文介紹一款自主設計沿塔筒法蘭周向運動檢測并自動擰緊螺栓的機器人,用以檢修塔筒連接螺栓。該方法不同于人力檢修,采用全自動化機器人,自主沿法蘭周向運動,定位螺栓,固定機體并通過電動力矩扳手檢測螺栓的擰緊程度,對其進行擰緊。避免人為操作的高危險性,不準確性,降低勞動力成本,提高了作業效率,作業精度和檢測維修的自動化程度。
在國內還沒有將機器人運用于風電機組檢測維修領域的實例,本文對促進國內風電機組檢修過程的自動化發展具有一定的參考價值。
[1] 高培昱. 風力發電變槳連接螺栓故障診斷和可靠性分析[D].太原理工大學,2017.
[2] 董姝言,楊揚,齊濤,蘇鳳宇,晁貫良,何海 建.基于周期對稱模型的MW級風電機組變槳軸承連接螺栓強度計算[J].機電工程,2017,34(04):357-360.
[3] 龔國偉. 風電機組法蘭螺栓連接建模與仿真技術研究[D].重慶大學,2014.
[4] Jeon M, Kim B G, Hong D. Maintenance robot for wind power blade cleaning[J]. Gerontechnology, 2012, 11(02).
[5] 王忠鋒,余泉.風電機組高強螺栓試驗與安裝技術總結[J].風能,2018(01):78-82.
[6] 高培昱. 風力發電變槳連接螺栓故障診斷和可靠性分析[D].太原:太原理工大學,2017.
[7] 朱少輝.風電機組塔筒設計和優化[J].機械工程與自動化,2016(06):115-117.
[8] 周舟,楊理誠,梁勇,等.大型風力機基礎法蘭高強度螺栓斷裂失效分析[J].太陽能學報,2016,37(09):2230-2235.
[9] 龐淵.風電機組典型事故及預防措施分析[J].中國高新技術企業,2015(29):123-125.
[10] 王娜,高文英,陳璐.兆瓦級風電機組塔筒法蘭螺栓連接強度計算實例[J].科技展望,2015,25(12):91.
[11] 李曉松. 大型風力發電機組塔筒載荷特性分析[D].沈陽:沈陽工業大學,2015.
[12] 王淼,徐占,姚亮,等.風電機組塔架高強度螺栓的質量控制研究[J].風能,2014(01):104-107.
[13] 史文超. 風電機組塔架高強螺栓應用中存在問題的分析[A].中國農機工業協會風能設備分會《風能產業》(2013年第9期)[C].,2013(09).
[14] 時代儒. 分析風電機組整機倒塌與安裝因果關系[A].中國農業機械工業協會風能設備分會2012年度論文集(上)[C].:中國農業機械工業協會風力機械分會,2012(03).
[15] 牛興海. 風電機組中關鍵零部件的疲勞分析及應用[D].重慶:重慶大學,2012.