多波束在富春江水庫庫容測量中的應用
2018-06-19 08:45:24余鴻慧陳敏谷松立
中華建設 2018年5期
余鴻慧 陳敏 谷松立
水庫庫容和淤積測量實質是通過測量不同時間的水庫區域水下和陸上地形,計算分析出水庫區域水下和陸上地形變化情況,進而得出水庫庫容和淤積變化情況。由于水庫位于山區,地形起伏大,區域遼闊,常規地基地形測量技術難以展開,尤其對于水下地形部分,需要專業的集測深、導航、數據處理于一體的綜合水下地形測量系統進行。從而,相對于常規的測量技術,水庫庫容和淤積測量具有專業性更強、技術要求更高的特點。本文采用基于CORS的多波束測深系統對富春江水庫壩前至三江口段的水下地形進行了自動化掃測,獲取了高精度的水下地形數據,為實現庫容計算提供了準確可靠的數據來源,取得了良好的應用效果。
一、富春江水庫基本情況
富春江水力發電廠地處浙江省桐廬縣境內,位于錢塘江中游富春江七里瀧峽谷出口處,上游距新安江水力發電廠約60km,下游距浙江省省會杭州市110km。富春江水力發電廠始建于1958年8月,1962年春停工緩建,1965年10月復工續建,1968年12月25日第一臺機組發電。電站邊基建、邊生產,1977年4月15日最后一臺機組投產。電站控制流域面積31645km2,占錢塘江流域總面積的64.73%。水庫正常高水位23m,相應庫面積56 km2,庫容4.4億m3,為日調節水庫。
電站建成后,通過合理的調度,最大限度地發揮了日調節水庫的調節功能,攔洪錯峰,減輕了下游洪災;淡水頂潮,改善了下游城市的供水質量,取得了明顯的社會效益。但是,至目前為止,富春江水力發電廠水庫經過了多年的運行,庫容和庫區淤積情況也已多年未測,不甚明晰。因此,為了使得水庫調度方案能夠更加切合庫容實際,以提高水庫的發電經濟效益以及確保水庫和大壩的安全運行,水庫庫容和庫區淤積情況亟待測量查明。
二、基于CORS的回聲測深控制方法
1. CORS定位技術
CORS定位的基本思想是利用流動站周圍的基準站觀測數據和已知坐標,計算流動站處的誤差改正數,解決RTK定位中流動站離基準站距離較遠情況下,差分觀測值中對流層、電離層的誤差殘余大,無法實現精確定位的問題。整個系統由參考站網、數據處理中心、數據通信鏈路和用戶四個部分組成,是CORS系統中為用戶提供實時高精度動態定位服務的系統組成部分,見圖1。

圖1 CORS系統構成圖
2.回聲測深技術
回聲測深儀是水下地形測量中最廣泛使用的測深設備,數據獲取的效率要遠遠高出使用測深鉛垂和測深桿的效率,見圖2。
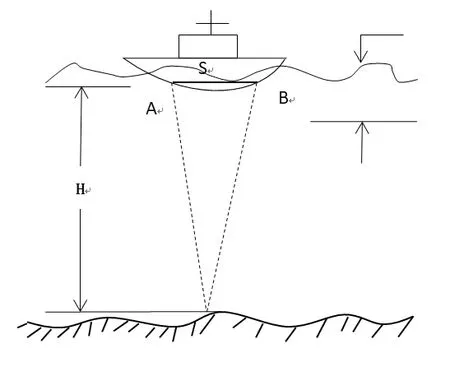
圖2 回聲測深儀原理
回聲測深儀主要由發射機、接收機、發射換能器、接受換能器、顯示設備、電源等部分組成。安裝在船舷或固定安裝在船底的發射機換能器,在沿測深線航行中,向水下發射一定頻率的聲波脈沖,以速度C在水中傳播到水底,經過反射或者散射返回,被接收機換能器接收。并且聲波在水中的傳播速度為C。聲波在水中傳播的時間t可以通過測深儀中的電子設備測得。根據時間t和聲波在水中的傳播速度C即可得出換能器至水底的距離,進而加上換能器至水面的距離即為水深。
3. CORS-回聲測深聯合自動化測深技術
該技術主要由CORS定位技術和回聲測深技術兩部分組合而成,水下點位的平面位置由CORS獲得,而高程信息由CORS和回聲測深技術聯合獲得。工作原理見圖3。
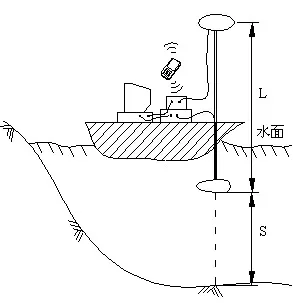
圖3 CORS-回聲測深聯合自動化測深技術
雖然CORS系統能夠實現大范圍覆蓋,但是在一定程度上尤其是山區,其精度、可靠性、準確性并非均勻分布,與地理位置、氣象條件有一定關系。因此,為了保證庫區淤積測量的有效,需要進行庫區CORS系統可靠性研究,主要包括CORS系統通訊信號強度測試、CORS系統定位精度、CORS系統與GNSS靜態控制網和傳統控制網的比較分析。
三、多波束水下測深系統
1.多波束水下測深系統原理
多波束測深系統的工作原理是利用發射換能器陣列向水底發射寬扇區覆蓋的聲波,利用接收換能器陣列對聲波進行窄波束接收,通過發射、接收扇區指向的正交性形成對海底地形的照射腳印,對這些腳印進行恰當的處理,一次探測就能給出與航向垂直的垂面內上百個甚至更多的海底被測點的水深值,從而能夠精確、快速地測出沿航線一定寬度內水下目標的大小、形狀和高低變化,比較可靠地描繪出水下地形的三維特征。
2.多波束水下測深系統組成
一套完整的多波束測深系統通常由多波束聲學系統、外圍輔助傳感器、數據處理軟件三部分組成。多波束聲學系統主要包含換能器、聲納處理系統及顯示系統;外圍輔助傳感器包含有GPS、羅經、表面聲速儀、聲速剖面儀以及姿態傳感器;數據處理軟件主要有導航采集軟件和后處理軟件,系統組成詳見圖4。
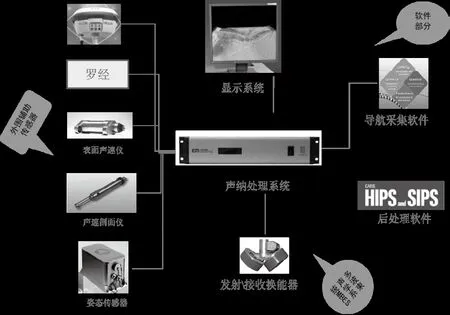
圖4 多波束測深系統組成
主要設備技術參數:
(1)換能器,型號EM2040C(雙探頭),頻率200~400kHz可調,步距10Hz;最大測深490m;水深分辨率≤18mm;最大波束覆蓋寬度200°;波束數目800個;最大輸出頻率50Hz;實時橫搖、縱搖、艏搖穩定:橫搖穩定±15°,縱搖穩定±10°,艏搖穩定±10°;換能器耐壓深度:50m;重量22.9kg。
(2)光纖羅經,航向動態精度±0.1°;航向靜態精度±0.1°;航向重復精度±0.025°;航向分辨率0.01°;航向穩定時間< 3min。
(3)運動傳感器,升沉精度5cm或者5%;升沉分辨率1cm;升沉周期0.03-30s;縱搖/橫搖精度0.01°;量程無限制。
(4)聲速剖面儀,量程1400~1550 m/s;響應時間< 1 ms;精度0.05 m/s;分辨率0.015 m/s;溫度范圍-2~+32℃。
(5)GPS,采用RTK實時差分定位技術,平面定位精度±10mm+1ppm,高程定位精度±20mm+1ppm。
四、實例應用
1.富春江水庫水下地形測量
富春江水庫的水下地形測量采用3中的多波束測深系統,多波束測深系統由多個部分組成,測量前要完成系統組裝、參數校準、軟硬件調試等一系列復雜準備工作,因不是本文主要內容在此不贅述。本次測量區域為壩前至三江口段,多波束掃測過程中按照先近岸后中間、先主流后支流的順序進行至待測區全覆蓋,保證相鄰兩測線間有有至少20%的重疊度,符合規范要求,具體測量作業流程如圖5所示。

圖5 多波束水下地形測量作業流程
2.庫容計算
利用多波束完成庫區水下地形測量后得到的成果數據為包含X、Y、Z坐標的文本文件,將點文件導入ArcGIS軟件,利用軟件中的表面體積功能可快速實現任意水位庫容量的計算,經過多次計算,可以得到不同高程對應的庫容,進而繪制富春江實測區域庫容曲線,計算結果如圖6所示。
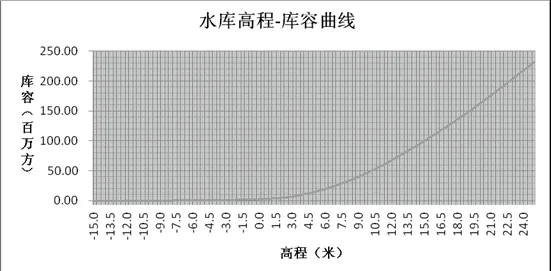
圖6 計算庫容曲線
五、結語
本文結合富春江水力發電廠大壩庫區淤積測量實際,研究基于CORS系統的集自動精確導航、自動水下地形測量、水下地形數據處理的綜合性庫區淤積測量技術體系,主要研究內容為基于CORS系統的復雜地理氣象條件下的庫區水下地形信息獲取技術研究。該技術體系的研究不僅能夠徹底改變當前庫區淤積測量和庫容計算分析的低精度、低效率、低可靠性、人工程度高的現狀,而且對于庫區淤積測量和水下地形測量技術的發展也會具有較大的推動作用。
該技術僅需CORS系統和移動通訊信號雙重覆蓋即可實施,而目前我國大部分地區已經實現了CORS系統和移動通訊信號雙重覆蓋(浙江CORS系統已經投入運行多年,系統穩定可靠,移動通訊信號也早已覆蓋全省,所以富春江水力發電廠庫區完全具備該條件),對于該技術的實施具有較好的應用條件。同時,該技術實施效率高,精度有良,所需人力、物力極小,極為適合各種庫區的水下地形和淤積測量。因此技術成果應用區域較為廣泛,也易于推廣。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
