足式機器人腿部傾角傳感器信號處理研究
2018-06-12 01:48:42王中立李麗宏
傳感技術學報 2018年5期
王中立,李麗宏
(太原理工大學信息工程學院,太原 030024)
隨著科技的進步以及經濟的發展,移動機器人需要不僅能在結構化環境下定點作業,還能在非結構化環境下非定點作業,比如,深海探測、地質災害救援和軍事目標追蹤等非結構化環境,從而代替人類完成危險任務以及到達人類不能到達的區域。普通的輪式移動機器人很難適應非結構化環境,由于足式機器人僅需滿足一定的離散落足點即可步行移動,因此足式機器人能更好地適應非結構化環境。
腿部是足式機器人準確行走以及適應非結構化環境的關鍵,由于足式機器人的姿態受到腿部狀態影響,因此腿部是決定機器人姿態的關鍵因素[1]。為了更好地獲取足端位置,本文利用高精度雙軸傳感器SCA1000測量腿部各個關節旋轉角度,實現對足式機器人足端精確定位。然而足式機器人工作環境多是非結構的戶外環境,受各種因素影響,傾角傳感器測量誤差大,再加上足式機器人長時間行走后,測量誤差累計,導致足式機器人腿部傾角傳感器測量不準確,難以根據傾角傳感器信號利用運動學模型分析腿部狀態。所以,如何處理腿部傾角傳感器信號是現如今足式機器人研究領域的熱點和難點。
現如今已有很多學者對提高傾角傳感器測量精度方面進行了大量的研究,例如:朱月青等研究了溫度對傾角傳感器的影響,通過利用BP神經網絡方法融合傾角傳感器輸出信號,將傳感器的測量誤差控制在2%以內[2];邵曉敏等研究了傾角傳感器輸入和輸出的關系,利用最小二乘法對傳感器進行信號處理,將傾角傳感器輸出信號的誤差控制在1.7%以內[3]等等。盡管以上研究在某種程度上提高了傾角傳感器的測量精度,但信號處理精度仍然偏低。為了進一步提高測量精度,本文先利用卡爾曼濾波算法對傾角傳感器信號進行濾波預處理,再采用徑向基函數RBF(Radial Basis Function)神經網絡模型對濾波預處理的信號進行溫度補償,而對于RBF神經網絡隱含層基函數中心值的選取,則利用具有并行尋優特征和自適應揮發系數的蟻群聚類算法,更改信息量,使算法能夠搜索全局最優解,提高了RBF網絡的訓練速度以及魯棒性。
1 足式機器人腿部系統概述
足式機器人腿部主要包括大腿、小腿和支撐腳盤,系統結構如圖1所示。傾角傳感器安裝位置如圖所示,其主要測量大腿和小腿的旋轉角度值,通過得到的角度值再根據腿部運動學方程可以得到足端狀態,也可以聯合多條腿的角度值來估計機器人位姿。足端估計原理如圖2所示。
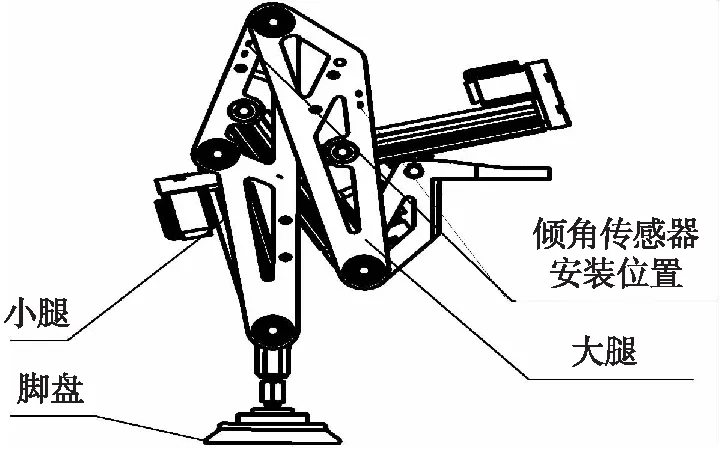
圖1 足式機器人腿部結構
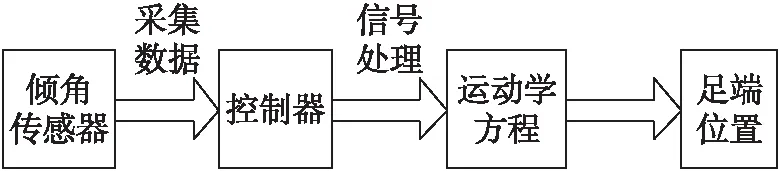
圖2 定位足端原理框圖
2 腿部傾角傳感器工作原理
SCA1000是采用三維MEMS(Micro Electro Mechanical System)技術開發的高精度雙軸傾角測量傳感器,能夠測量相對于水平面的傾斜角度以及俯仰角度,同時也能測量所處環境的溫度。內部主要組成包括:硅敏感電容傳感器、存儲器、溫度傳感器、A/D轉換器、感應元件、信號調理電路、濾波電路和SPI通信接口等[4]。該傳感器可以分別通過X通道、Y通道測量傾斜加速度、俯仰加速度,測得的信號既可以是數字信號也可以是模擬信號,最終通過SPI通信接口傳輸到控制器,同時也可以輸出溫度信號。
傾角傳感器內部具有對加速度敏感的質量塊,懸臂彈簧把質量塊固定在敏感器上,并且一對電極板置于質量塊的上下方,等似于一個電容,該電容是一種極距變化電容。當傾角傳感器發生傾斜時,由于重力作用,傾角傳感器中質量塊發生偏移,導致兩片電極板與質量塊之間的距離發生相對變化,因此,電容發生變化,最終導致電壓變化。電壓值可以反映加速度值,再通過相應的計算得到角度值。
傾角傳感器的角度輸出可以利用模擬量電壓值或者數字量進行轉換。
電壓到角度轉換公式:
(1)
式中:Offset是在0°輸出的電壓值;Sen是靈敏度;Vout是芯片輸出的模擬量。
數字量到角度轉換公式:
(2)
式中:Dout是X或Y通道的數字輸出量;Dout@0°是數值抵消量(一般傾角為0°時,輸出1 024數字量);Sen是芯片靈敏度。
SCA1000內部溫度傳感器測量溫度值為8 bit數據,既可以作為內在補償,也可以作為外部補償,轉換公式:
(3)
式中:Counts是讀取的溫度量;T是轉換后的溫度量,單位是 ℃。
3 傾角信號濾波預處理
3.1 卡爾曼濾波原理
假設一個研究對象是隨機線性離散系統,那么其卡爾曼濾波狀態方程表示為:
X(k)=S(k)X(k-1)+B(k)U(k)+W(k)
(4)
式中:X(k)是研究對象的狀態向量;S(k)是狀態轉移矩陣;B(k)是輸入控制矩陣;U(k)是控制向量;W(k)可以看作均值為0,協方差為σk的正態分布的過程噪聲。
觀測方程可表示為:
Z(k)=H(k)X(k)+V(k)
(5)
式中:Z(k)是研究對象的觀測向量;H(k)是觀測矩陣;V(k)為觀測噪聲矩陣。
卡爾曼濾波器的遞推過程主要分為2部分:預測和更新。在預測部分時,卡爾曼濾波器利用上一狀態的估計值來估計當前狀態的值;在更新部分時,卡爾曼濾波器會利用當前狀態的觀測值來補償預測階段獲得的預測值,使新獲得的估計值更為精確[5-7]。
假設控制信號向量U(k)=0,則狀態預測方程為:
X(k|k-1)=S(k)X(k-1|k-1)
(6)
預測誤差協方差估計為:
(7)
式中:Q(k)是系統噪聲協方差陣。
更新方程為:
K(k)=P(k|k-1)HT(k)[H(k)P(k|k-1)HT(k)+R(k)]-1
(8)
式中:R(k)為測量噪聲協方差陣。
狀態估計為:
X(k|k)=X(k|k-1)+K(k)[Z(k)-H(k)X(k|k-1)]
(9)
最優解在更新k狀態下所對應的誤差協方差為:
P(k|k)=[1-K(k)H(k)]P(k|k-1)
(10)
由上式可知,除了給定濾波初值X(0|0)和P(0|0)以及k時刻的觀測值Z(k)之外,還需要根據實際應用調整Q和R的取值,Q和R可以通過對象模型和采集離線數據獲得,最后通過遞推計算得出k時刻的狀態估計值X(k|k)和誤差協方差P(k|k)。
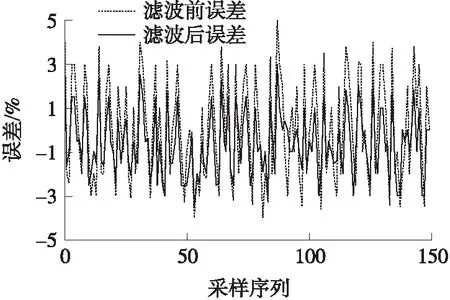
圖3 卡爾曼濾波前后傾角信號誤差對比圖
3.2 卡爾曼濾波在信號處理中的應用
本文針對SCA1000高精度雙軸傾角傳感器輸出的傾角信號進行卡爾曼濾波,在濾波時,先將SCA1000傾角傳感器固定在三軸精密轉臺上,連續采集150組輸出信號和傾角傳感器輸出信號,并計算傾角傳感器輸出信號的平均值和方差,分別作為濾波初值X(0|0)和P(0|0)。Q是濾波參數且反映的是對象模型噪聲方差,當模型確定時,可以把此參數定位極小值;R是測量方差,可以通過采集數據求得,本文為了得到良好的濾波效果,根據經驗確定Q的取值為1×10-6,R的取值為0.001 5。
本文利用MatLab 2014b仿真軟件進行卡爾曼濾波仿真分析,利用軟件中設計的濾波器處理采集數據,得到傾角誤差波形圖如圖3所示。
從圖3可知,經過卡爾曼濾波后傾角信號中的隨機噪聲明顯減少,提高了傾角信號的穩定性和精確度。為了進一步提高傾角傳感器測量精度,再把濾波信號作為建立的RBF神經網絡樣本數據。
4 RBF神經網絡原理及模型建立
4.1 RBF神經網絡原理
RBF神經網絡是包含輸入層、隱含層和輸出層的三層前饋單隱層網絡,利用非線性基函數的線性組合來實現映射關系[8],其結構如圖4所示。
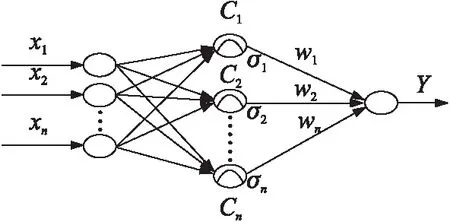
圖4 RBF神經網絡結構
輸入層僅起到信號傳輸的作用,輸入層和隱含層之間的連接權值為1;隱含層神經元的激活函數為徑向基函數,它是中心點徑向對稱且衰減的非負線性函數,此函數局部響應函數采用非線性優化策略;輸出層是對輸入模式做出的響應,對線性權值進行調整,采用線性化策略,學習速度較快[9-11]。本文中RBF神經網絡隱含層節點的徑向基函數選用高斯函數:
(11)
式中:σ為基函數的擴展常數或寬度。
設輸入樣本為X=(x1,x2,…,xn),單輸出為y,隱含層節點輸出為D=(d0,d2,…,dm),隱含層節點到輸出節點的連接權重為W=(w1,w2,…,wm),當高斯函數作為隱含層節點的激勵函數時,RBF神經網絡的單輸出Y表示為:
(12)
式中:m是隱含層節點數;wi是第i個隱含層節點與輸出層節點連接權值;‖·‖是歐幾里得范數;Ci是第i個隱含層節點中心參數。
4.2 模型建立
4.2.1 基于蟻群算法的RBF神經網絡訓練
在處理大樣本數據時,一般聚類算法,如K均值聚類算法,存在聚類慢、易陷入局部最優問題中,難以獲得最優結果,因此,本文采用蟻群算法,蟻群算法是人們在觀察蟻群覓食行為時受到啟發而提出的。螞蟻在覓食過程中,會在經過的地方留下一些物質,這些物質就是信息素[12]。而路徑上信息素的多少,會決定同一群螞蟻行進的方向,它們通過比較路徑上信息素濃度大小,選擇濃度大的方向前進,同時,也會在該路徑上留下自己的信息素。相同時間內,路徑越短,則被越多的螞蟻訪問,所以,后續的螞蟻選擇該路徑的可能性越大,因此,該路徑就是到達目標食物的最佳路徑[13-14]。利用蟻群算法進行聚類分析時,聚類中心為目標食物源,把數據看作具有不同屬性的螞蟻,聚類過程就等同于螞蟻尋找食物。其聚類詳細過程[15]如下:
①基本參數初始化:樣本數量為N,樣本屬性為m,聚類半徑為r,誤差允許值為ξ0,參考概率為p。
②求出任意兩樣本間的歐式距離Lij:
Lij=‖xi-xj‖,i,j=1,2,…,N
(13)
③對路徑上的信息素τij進行初始化可以依據如下公式:
(14)
④xi和xj之間的概率為:
(15)
如果值pij(t)不少于預先設定值p0,則把xi歸屬于xj類,否則為不同的兩個類。
若誤差ξ<ξ0,則停止,否則繼續。
⑥得到新的聚類中心與各樣本間的距離Lij,改變信息素的揮發系數:
(16)
式中:ρ為揮發系數,ρ的最小值為ρmin;t為時間,則t、t-1時刻的揮發系數分別為ρ(t)、ρ(t-1)。調整信息素:
式中,S為信息強度,是一個常數。
⑦重復進行步驟④~步驟⑥直到滿足預設誤差為止,最后得到聚類中心以及聚類數。
4.2.2RBF神經網絡設計及樣本數據處理
通過蟻群算法得到的聚類中心作為隱含層單元中心值,然后通過最小二乘法來直接求出隱含層到輸出層的連接權值。
利用RBF神經網絡處理傾角傳感器輸出信號時,應確定輸入層以及輸出層節點個數。由于傾角傳感器測量時易受溫度影響,因此,把傾角傳感器輸出的溫度信號和經過濾波處理的傾角信號作為RBF網絡輸入量,確定輸入層節點個數為2個。由于需得到精確的傾角傳感器輸出信號,所以把傾角信號作為輸出,即輸出層為單輸出。
為了控制RBF神經網絡規模以及確保其訓練的準確性和不出現飽和狀況,對采集的溫度數據和濾波后的傾角信號進行歸一化處理,使樣本數據落在區間[0,1]之內,歸一化公式如下:
Xi=(di-dimax)/(dimin-dimax)
(17)
式中:Xi是樣本數據的歸一化;di是樣本數據的原始數據;dimin,dimax分別是數據的最小值、最大值。
5 實驗驗證及分析
把SCA1000傾角傳感器放在三軸精密轉臺上,通過改變外界溫度和轉臺角度,采集包括三軸精密轉臺的傾角信號以及傾角傳感器的溫度信號、傾角信號,從采集數據中隨機選取50組數據。首先,對采集的傾角傳感器的傾角信號進行卡爾曼濾波處理,然后再隨機選取30組溫度數據和濾波后的傾角傳感器輸出信號經過歸一化后,用于RBF神經網絡訓練,其余20組數據用作測試樣本。
利用MATLAB 2014b中的神經網絡工具箱來訓練RBF神經網絡,根據經驗值以及補償精度要求,設置基于蟻群算法的RBF神經網絡各參數如下:r=0.4,ξ0=0.003,ρmin=0.3,S=25,p0=0.5。建立一個隱含層單元中心點個數為6個,目標誤差為1×10-6的RBF神經網絡。再利用其余20組數據測試訓練好的RBF神經網絡。經過25次訓練達到目標訓練精度,神經網絡誤差收斂曲線如圖5所示。
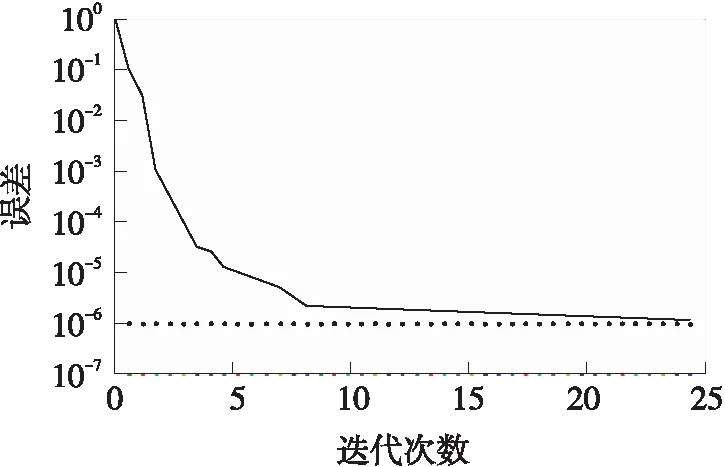
圖5 RBF神經網絡誤差收斂曲線
從50組數據中隨機選取10組數據,然后對卡爾曼濾波后的數據與先通過卡爾曼濾波再進行基于蟻群聚類算法的RBF神經網絡溫度補償的數據誤差相比較,得到如表1所示的信號誤差比較結果。
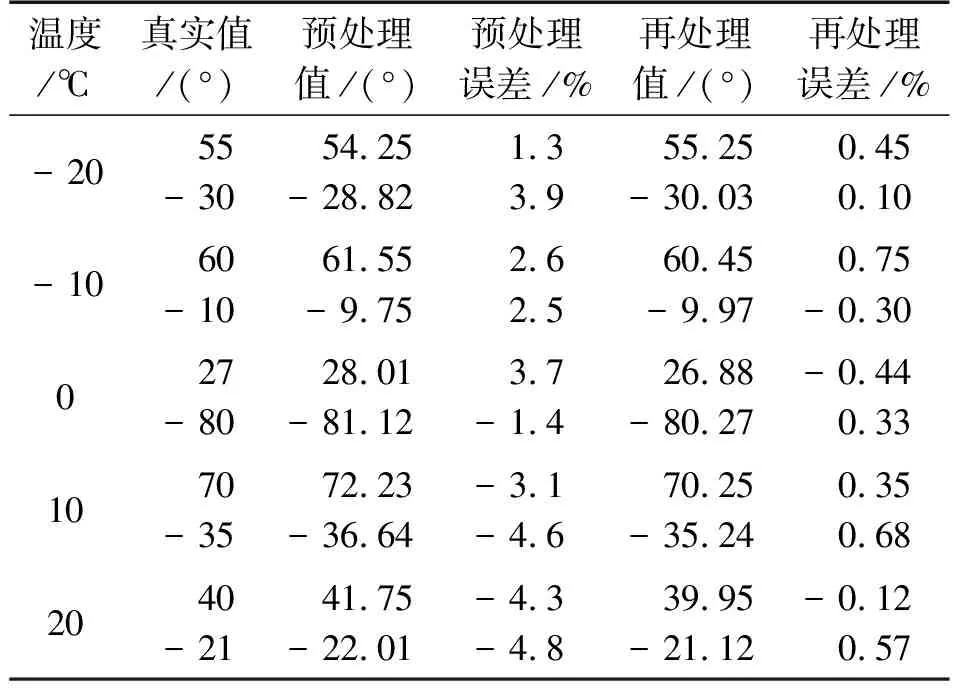
表1 實驗數據誤差比較
由表1得出,經過卡爾曼濾波預處理后的傾角傳感器測量誤差較大,不能達到良好的信號處理效果,為了達到較高的測量精度,再把溫度信號和預處理的傾角信號作為基于蟻群聚類算法的RBF神經網絡的輸入信號,對傾角信號進行溫度補償,能把傾角測量誤差控制在0.75%以內。
6 結論
足式機器人腿部傾角傳感器易受外界環境的影響,特別是外界溫度的影響,造成傾角傳感器測量信號中含有較多噪聲信號,測量誤差大,難以利用直接測量的傾角信號估計足端位置。為了更好地得到精確的傾角信號,本文采集了傾角傳感器輸出的溫度信號,把溫度信號和經過卡爾曼濾波方法濾波后的信號作為建立的基于蟻群聚類算法的RBF神經網絡模型的樣本數據,對傳感器傾角信號進行溫度補償。經過實驗驗證,能夠很好地去除傾角傳感器信號中的噪聲,對傾角信號進行溫度補償,使得測量誤差能夠控制在0.75%以內,為估計足端位置提供了高精度的角度值。
參考文獻:
[1] 趙杰,張赫,劉玉斌,等. 六足機器人HITCR-I的研制及步行實驗[J]. 華南理工大學學報(自然科學版),2012,40(12):17-23.
[2] 朱月青,張志利,譚立龍,等. BP神經網絡在傾角傳感器數據融合中的應用[J]. 儀表技術與傳感器,2010(1):101-102.
[3] 邵曉敏. 全量程無線傾角傳感器設計[D]. 上海:上海大學,2012.
[4] 曹建安,張樂平,吳昊,等. 采用傾角傳感器實現空間旋轉角度測量的解析方法研究[J]. 西安交通大學學報,2013,47(10):109-114.
[5] 袁健,周忠海,金光虎,等. 基于卡爾曼濾波的自主式水下航行器大尺度編隊控制[J]. 智能系統學報,2013(4):344-348.
[6] 王小冬. 卡爾曼濾波在衛星導航中的應用研究[D]. 大連:大連海事大學,2008.
[7] 羅貞. 基于卡爾曼濾波器的系統狀態估計和故障檢測[D]. 武漢:華中科技大學,2013.
[8] 乃永強,李軍. 基于極限學習機的機械臂自適應神經控制[J]. 信息與控制,2015,44(3):257-262.
[9] 喬俊飛,韓紅桂. RBF神經網絡的結構動態優化設計[J]. 自動化學報,2010,36(6):865-872.
[10] 張朋,范福玲,楊益,等. 基于時間序列模型的超聲信號濾波算法研究[J]. 傳感技術學報,2015(3):396-400.
[11] 鄭立斌,王紅梅,顧寄南,等. RBF神經網絡在機器人視覺伺服控制中的應用[J]. 機床與液壓,2015,43(15):41-43.
[12] 孫艷梅,都文和,馮昌浩,等. 基于蟻群聚類算法的RBF神經網絡在壓力傳感器中的應用[J]. 傳感技術學報,2013,26(6):806-809.
[13] 柏繼云. 蟻群優化算法及覓食行為模型研究[D]. 哈爾濱:哈爾濱工業大學,2013.
[14] 楊劍峰. 蟻群算法及其應用研究[D]. 杭州:浙江大學,2007.
[15] 黃延紅. 基于蟻群算法的聚類算法研究[D]. 成都:電子科技大學,2011.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
電源技術(2016年9期)2016-02-27 09:05:39
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36