基于人工智能的汽車車速和方向控制分析
2018-06-12 08:58:02紀明君陳新
時代汽車 2018年9期
紀明君 陳新
北京汽車研究總院 北京市 101300
1 引言
近些年的通信、新能源和傳感器技術的快速發展,專業工作人員已將這些技術吸收到汽車行業,為汽車的發展形勢帶來了革新。如在產品形態和汽車產業的變革方向,未來的發展方向更加趨向于清潔能源和智能化,汽車已不僅僅是交通工具,還有一些智能終端和處理單元的作用,個性化更加明顯[1]。產業格局的發展和生態化方向的發展,用戶體驗也已成為汽車消費的多元化方向之一,加快汽車產業和各種先進的技術進行融合也是未來的發展方向之一,如當今最炙手可熱的人工智能技術,重塑當今汽車行業發展的新格局[2]。
汽車智能化是未來最重要的發展方向之一,其中的自動駕駛技術就是未來汽車產業的最主要目標,所帶來的優勢將會是交通安全、消除擁堵,提升效率都具有舉足輕重的作用效果。結合當前的深度學習技術和機器視覺技術,都為智能汽車的成果應用提供了技術支撐。本系統在智能決策規劃的基礎上對車輛的速度和方向控制進行了研究分析。構建基于AI的自動駕駛架構,構建車速和方向控制策略,并梳理汽車智能化發展的關鍵技術和發展趨勢[3]。
2 自動駕駛技術的發展和AI應用現狀研究
2.1 自動駕駛技術的發展現狀
汽車產業鏈的發展中,自動駕駛汽車將會是主要發展對象,這個作為機電一體化和高度集成的汽車系統將會是替代人類的最有效設備,所組成的復雜融合系統將會包含感知和獨立的決策能力,集成了多個傳感器的系統將會具有數據關聯能力,同時在車輛坐標系下進行元數據的融合,目前自動駕駛技術主要有兩個發展方向,為自動駕駛的決策規劃服務,在自動駕駛的潮流下,車速控制和方向控制已成為自動駕駛的瓶頸,本文將主要針對車速和方向控制進行研究[4]。
漸進式發展,為了提高自動駕駛汽車的智能化水平,在研究的不同階段分別不同形式的駕駛選擇,如輔助式駕駛階段,進行輔助式駕駛,依據駕駛員的指令為主,系統只是起到輔助性的作用;同時還具有全自動駕駛和部分自動駕駛階段。顛覆式發展,在不考慮循序漸進的駕駛思路情況下,完全依照技術實現車輛的全自動駕駛,這種方法的難道最大,目前情況下,美國在這個方面取得了不錯的成就,如美國國防部所提出了一系列項目ALV項目、DEMOII計劃等。
2.2 自動駕駛技術的應用現狀和挑戰
隨著科學技術的發展,目前所具有的代表性的技術如人工智能技術和機器視覺等,都在一定程度上證明了技術的開拓性,在此將AI技術和MV技術引入到車輛的自動駕駛中來,實現車輛的環境感知,獲取環境信息實現決策和執行器的處理。在車輛的駕駛全過程中,傳感器和執行器的大規模使用都需要大量的數據計算和算法的邏輯推導,同時在發展中還面臨一系列的挑戰:(1)自動駕駛的全生命周期中,信息的實時更新所導致數據量的冗余,這些都對計算能力提出了考驗;(2)部件小型化的產業化需求使目前系統龐大的硬件尺寸面臨挑戰,不滿足車規級部件需求。自動駕駛方向控制的目標就是通過控制轉向角度的實際參數和期望參數的偏差來衡量;車速的自動控制就是一車速偏差量最小為控制目標,將實際速度與期望速度的偏差值控制在最小范圍。
所面臨的挑戰也恰恰說明了自動駕駛汽車技術所面臨的不足之處,根據這些挑戰,大幅度的提高車輛的數據記錄能力和計算能力,再實時環境下的自適應能力和選擇性能力也都將面臨挑戰。為解決這些難題和挑戰,將AI技術和車載的集成化應用,構建基于大數據環境下的云協同駕駛,為智能駕駛提高技術上的保障。根據云計算和大數據技術的發展,提出車云協同自動駕駛系統架構。為子系統提供可靠的數據存儲能力,對數據的傳輸和共享提供分享平臺,同時還有具有一定的自主學習能力,通過自主學習來不斷提供處理問題的能力和可適應性。硬件環境通用不可或缺,通過軟件技術的提高在一定程度上解放硬件的能力,降低智能汽車的總體成本。
3 基于AI的自動駕駛系統架構和關鍵技術
基于AI的車云協同自動駕駛系統架構方案主要包含數據的獲取、數據的計算和邏輯性的推導,面向輔復雜的行車環境,硬件和軟件的協同架構具有重要意義,如下所示:
圖1所示架構方案,主要由幾個子系統組成:嵌入式應用終端設計、云系統AI集成就似乎、信息加護平臺構建和大數據云處理系統等,這些構成了對輔助環境的精確感知和當前環境的決策。
3.1 自動駕駛AI終端硬件架構
作為基于AI的車云協同自動駕駛系統架構方案的子系統,自動駕駛硬件終端具有傳感器感知、路線決策規劃和執行器控制等能力,這是一個集成化的智能習題,根據現有的駕駛環境感知外部環境的變化,主動生產規劃決策,對不同任務和工作狀況實現協同化的控制,其中的CPU和MCU結構構成了大數據環境下的高速網絡處理能力。

圖1 基于AI的車云協同自動駕駛系統架構方案示意圖
3.2 自動駕駛AI終端軟件架構
作為基于AI的車云協同自動駕駛系統架構方案終端軟件子系統,其具有的執行控制和信號檢測等能力,所具有的執行器單元包括計算、控制和傳感器陣列等,通過軟件的模塊化設計將智能駕駛的感知和規劃能力集成在一起,確保合理有效的分配和調度,有效的使用系統所具有的的模塊化資源和計算能力,優先執行最新計算結果,并具有后續的半自動修復功能。

圖2 自動駕駛路徑模型
4 自動駕駛策略研究
自動駕駛方向控制的目標是通過自動控制實現工作過程中實際方向和期望方向的偏差最小化,為此本文提出了一種以側向位置和偏角的控制方法。為了達到有效的控制,需要在智能汽車中預置方向控制器,預置的方向控制器將車輛的感知、決策和執行能力通過當前形成環境進行動態調整,根據車速調整方向輸入信息實現軌跡校正。根據車輛運行過程中的軌跡識別獲得轉向角度的所需值,構建如下的轉向增益:

式中:R是角速度值,β為轉角,L1軸距值,W1為車輛穩定性值。
圖2所示為自動駕駛路徑模型,其中0XY為相對坐標系,為外部環境坐標,0X01Y01為車輛動態行駛坐標系,汽車行駛過程中的兩個位置分別為(X1,Y1),(XN,YN),擺角為θ,車輛前進預留距離為L,運行軌跡與坐標軸的切線坐標為(X01,Y01),(X0N,Y0N)。
自動駕駛的本質就是通過各個執行器實現在無人狀態下的車輛控制,因為此過程是一個高度復雜的系統,參數的變化具有非線性關系,難以準確的衡量。系統的智能決策規劃模塊通過基于人工智能的決策以及基于A*算法的路徑規劃模塊得到車輛行駛的實時局部路徑規劃,在此基礎上得到車輛在橫縱向運動中的偏差值,輸出給控制模塊。基于人工智能的決策規劃模塊在實際道路使用過程中,可能會遇到沒有在訓練中覆蓋到的場景,在這種情況下,決策規劃模塊的輸出就會違反常理,做出影響駕駛安全的控制策略,這個時候就需要在控制執行前加上安全分析的功能,例如在高速的情況下轉彎角度過大就需要立即糾正并報警。控制模塊所用的PID控制器再增加3個參數對其進行修正,利用角度偏差、位置偏差和角速度得到目標值。如下圖所示的控制方案圖所示,車速偏差表達的為所期望得到的車速和實際行駛過程中的車速差值,車速控制器所要實現的目標就是將車速差值控制在盡量小的數值,本文采用的是PID控制單元實現車速增減變化控制,控制器將增益調度值和穩態轉向的函數相乘,計算得到反饋角度和位置偏差的反饋量。
人工智能決策不同于傳統的決策支持系統(DSS),傳統的決策主要是對結構化和半結構化決策問題的支持,采用人機對話手段對決策模型的分析,并不能滿足本文的復雜模型,在此提出了人工智能決策支持系統(IDSS),利用人工智能和特有的專家系統分析定性的問題和不確定性的推理,為解決上述問題提供了新的途徑,如上述流程圖3所示,在實現車速控制之前添加智能決策規劃,實現系統的監控和撞見檢測,最終在判斷環節再次對智能決策規劃的結果進行分析處理,無疑會大大提高決策的支持能力。
IDSS實現的關鍵技術是智能化模型的建立、系統體系構建和知識處理技術等,但是知識管理在其中無疑是核心技術,因為決策系統的決策能力很大程度上取決于知識系統。對于模型建立中所需要的數據、方法和模型信息要進行結構化和半結構化的處理并存儲在知識庫中,無論是事實、規則還是經驗都需要實現統一化的知識管理。車速和油門以及制動踏板具有重要的控制輸入關系,控制關系如下式所示:

式中表示的為車速偏差,E為車輛當前位置的側向偏差或速度偏差。車速偏差定義為期望值與實際值的偏差,采用PID控制執行單元的控制實現車速的增減控制,在油門和制動踏板的使用方面,得到以下控制量US。
在油門和離合的頻繁切換過程中,對油門和制動器需要設置合理的切換策略,首先保證不能同時將制動器和油門同時踩下,在某一特定車速的時候保證油門和制動器不會頻繁的進行切換,當為了降低車速的時候,不會踩下制動器,單一的利用油門就可以實現車速的下降。基于這些基本原理設置期望方程如下:

式中Apk為車輛切換參數,在車輛切換控制參數時分為以下三個區間:當處于Apk>As時,處于加速區間;當-As<Apk<As時,處于車速保持區間;當Apk<-As時,為減速區間,得到下圖3所示的油門和制動切換流程圖。
對于自動駕駛實際運行中的軌跡控制,驗證該方法的合理性和有效性。在切換過程中,需要遵守以下的三個原則:(1)針對當前的油門和制動器狀態進行判定,用參數進行表示,但油門踏板處于工作狀態,其它兩個參數Th_out=Th_in 且Br_out=0,可避免工作狀態下的雜亂現象進行有效的車輛減速。(2)若當前的油門和制動器參數為零,表示的是不工作狀態,輸出值參數為Th_out=0,另外的輸出值參數與輸入值參數關系為Br_out=Br_in,表示制動踏板工作來實現車輛減速。
由上圖的油門和制動切換流程圖可得,油門和制動器踏板工作狀態分別有Th_a和Br_a進行表示,參數值零表示都不工作狀態;油門踏板和制動器踏板的輸出分別用Th_out和Br_out參數進行表示,油門踏板和制動器踏板的輸入分別用Th_in和Br_in進行表示。舉例當控制量參數u(k)大于零時,可表示為Th_in=u(k)且Br_in=0。

圖3 車速控制策略
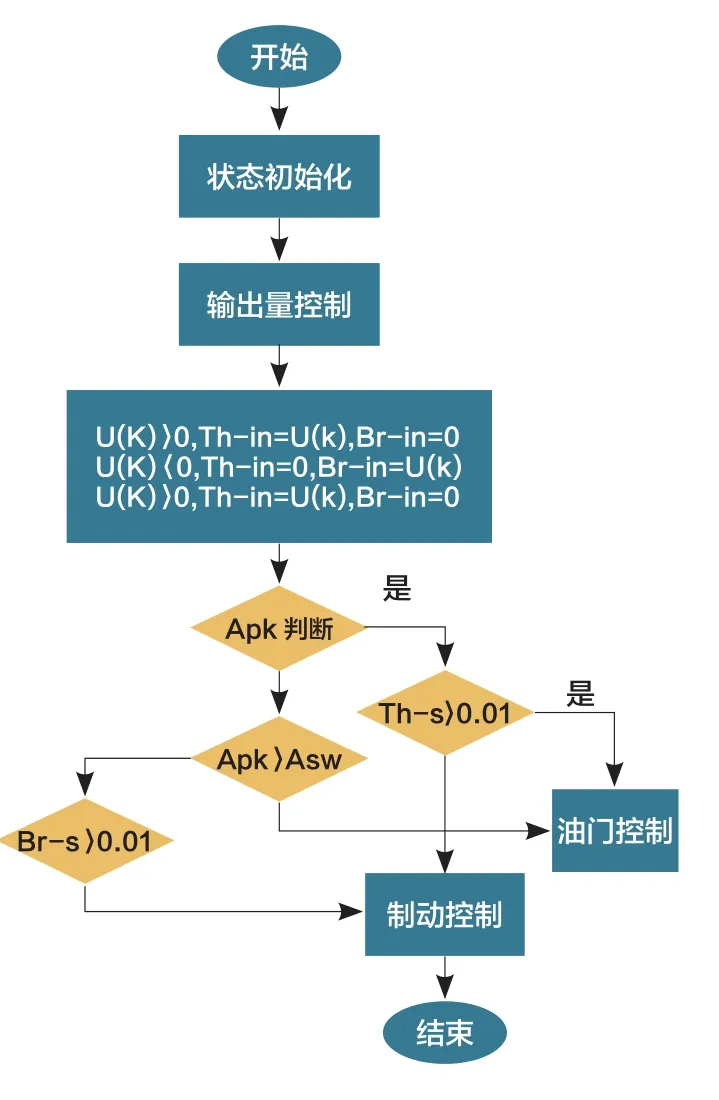
圖3 車速控制策略
5 結語
本文針對基于人工智能的汽車車速和方向控制分析中所面臨的挑戰和困難,在現有的自動駕駛技術發展的基礎上進行了大量的研究,闡述了人工智能決策規劃下的汽車車速和方向控制分析方法,首先采用了適用于各種行車環境的于AI的車云協同自動駕駛系統架構方案,為了實現車速和方向的控制,引入位置偏差和偏角兩個參數,在調度方面引入穩態轉向增益方法,同時利用PID控制器實現良好的控制,所得結果在各種路況下均能保持較小的路徑跟隨偏差。在多種目標路徑及目標車速下均能比較準確接近期望軌跡和目標車速,說明該自動駕駛算法是合理、有效的。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
計算機應用(2021年1期)2021-01-21 03:22:38
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34