固體氧化物燃料電池建模及廣義預測控制
2018-06-06 01:38:54李俊紅沈文兵宗天成
電池 2018年6期
李 肖,李俊紅,沈文兵,宗天成
(南通大學電氣工程學院,江蘇 南通 226019)
為使固體氧化物燃料電池(SOFC)可靠、穩定和高效地工作,需要確定系統的動態輸入-輸出特性[1]。譚勛瓊等[2]基于內部氣體流量的動態守恒方程,推導在假設條件下各種氣體分壓和電流的函數關系,進而構建SOFC的集總模型。闕加雄等[3]基于SOFC內部的3種動力學過程,綜合考慮內部的質量平衡、能量平衡和電化學反應過程,建立動態模型。SOFC的內部反應復雜,且模型具有隨機干擾、非線性等特點,因此建立的模型都很復雜,難以用于控制系統的分析和設計[4]。系統辨識方法是利用系統的輸入-輸出數據來確定系統的數學模型,更適用于工程應用[5]。
廣義預測控制算法采用反饋校正和滾動優化策略,具有較強的魯棒性,適用于復雜的工業過程控制[6]。本文作者通過SIMULINK搭建燃料電池的機理模型,分析并獲得模型的輸入-輸出數據,再辨識SOFC的數學模型,避開電池的復雜反應過程來建模,并進行廣義預測控制算法的設計。
1 SOFC機理建模
燃料電池模型電壓包括4種電壓:開環電壓(En)、活化極化損失電壓(Ua)、濃度損失電壓(Uc)和歐姆損耗電壓(Uo)。SOFC工作電壓(Ud)按式(1)計算:
Ud=En-Ua-Uc-Uo
(1)
本文作者使用MATLAB/SIMULINK軟件實現SOFC機理模型的實現,設計的基于SIMULINK的SOFC模型見圖1。
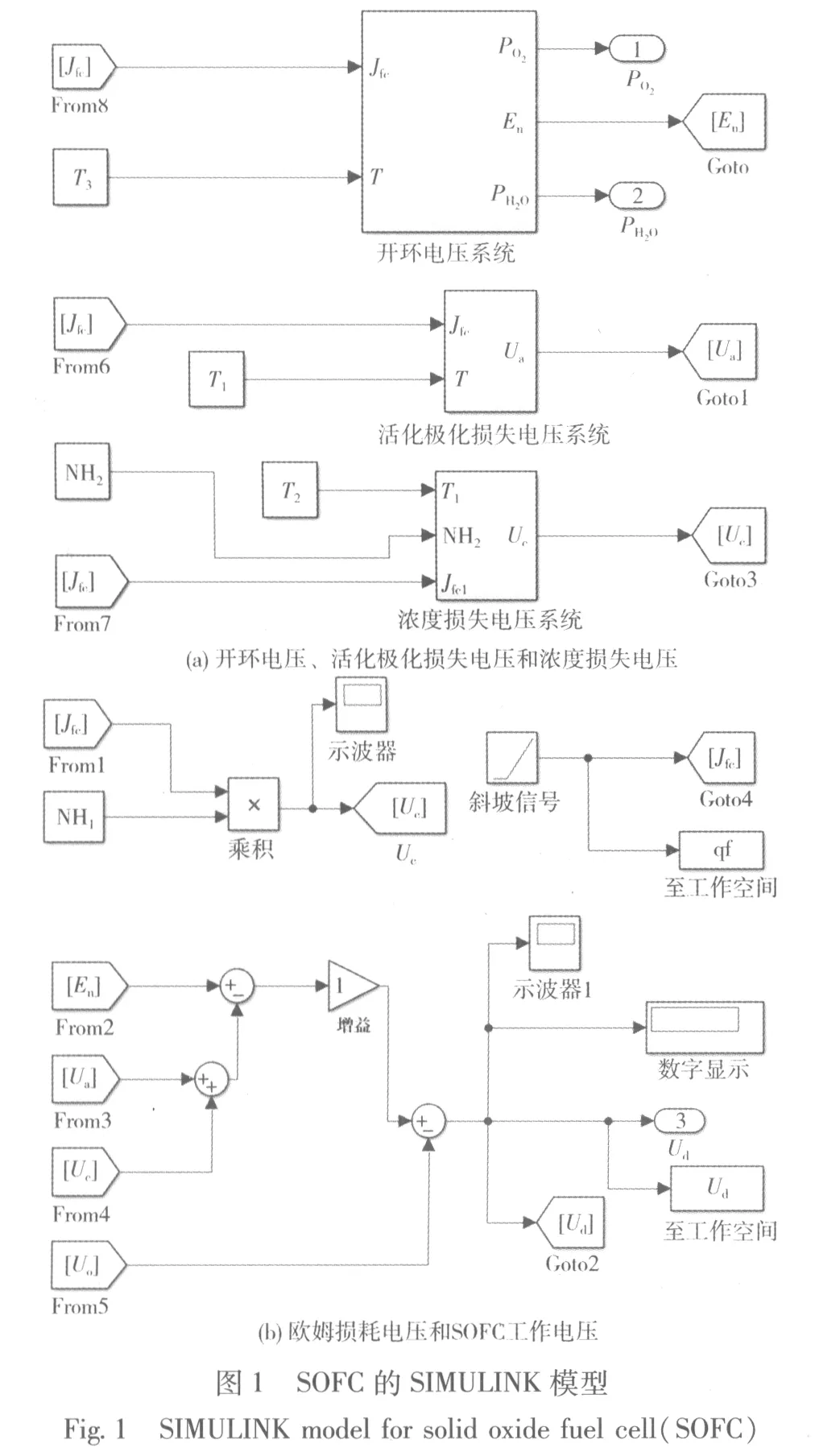
圖1中:Goto模塊用于保存端口的輸出;From模塊用于將保存的端口輸出送入指定模塊;Jfc是電流密度;qf是獲取的電流數據;T、T1、T2和T3均是工作溫度,取值為973 K;NH1是內阻,取值為0.126 Ω;NH2是輸入流速,取值為51 ml/s。
2 SOFC電池的模型辨識
系統辨識是根據動態系統的輸入-輸出數據構造數學模型的過程[5]。在理論建模太復雜的時候,經常采用系統辨識的方法。為滿足控制系統設計的需要,利用MATLAB中的系統辨識工具箱,辨識SOFC的輸出電壓響應模型,從而可避開SOFC內部復雜的反應機理。
將系統的輸入-輸出數據導入系統辨識工具箱,經過對各種模型結構辨識結果的分析與對比,最終選擇具有外部輸入的自回歸滑動平均(ARMAX)模型作為SOFC的模型結構。通過系統辨識工具箱辨識出的系統具體參數為:
A(q-1)=1-1.22q-1+0.22q-2
(2)
B(q-1)=0.99
(3)
C(q-1)=1+0.927q-1
(4)
式(2)-(4)中:q-1為時延因子;A(q-1)、B(q-1)和C(q-1)均是q-1的多項式,為系統參數。
3 SOFC的控制設計
3.1 廣義預測控制算法簡介
廣義預測控制(GPC)算法結合了多種算法的優點[6],如果能加以應用,可提高SOFC系統的控制效果。
3.2 預測模型
GPC采用式(5)作為系統的預測模型
A(q-1)y(k)=B(q-1)u(k)+C(q-1)ξ(k)/δ
(5)
式(5)中:δ為差分算子,δ=1-q-1;k表示采樣時刻序列;y(k)、u(k)是系統的輸出、輸入;ξ(k)是均值為零的白噪聲序列。
為了進行柔化控制,控制的目標是跟蹤如式(6)所示的參考軌線。
w(k+j)=ajy(k)+(1-aj)yr(j=1,2,…,n)
(6)
式(6)中:j為預測長度;w(k+j)為系統的超前j步參考軌線;y(k)和yr分別為輸出值和設定值;α為柔化系數,0<α<1。
根據預測控制理論,引入Diophantine方程可得到:

(7)
(8)
(9)
ΔU=[Δu(k),Δu(k+1),…,Δu(k+n-1)]T
(10)
f=[f(k+1),f(k+2),…,f(k+n)]T
(11)
3.3 最優控制律
若令W=[w(k+1),w(k+2),…,w(k+n)]T,則目標函數J可寫成:
J=(Y-W)T(Y-W)+λΔUTΔU
(12)
式(12)中:Y是輸出矩陣。
ΔU=(GTG+λI)-1GT(W-f)
(13)
如式(13)所示,在控制量加權系數λ和柔化后的設定值向量W均已知的情況下,若求ΔU必須先知道G和f。由式(7)可得:
y(k+n)=gn-1Δu(k)+…+g0Δu(k+n-1)
+f(k+n)+Enξ(k+n)
(14)
令X(k)=[Δu(k),Δu(k+1),…,Δu(k+n-1),1],θ(k)=[gn-1,gn-2,…,g0,f(k+n)]T,輸出預測值可寫成:
y(k+n/k)=X(k)θ(k)
(15)
式(15)中:X(k)為信息向量;θ(k)為待估計參數向量。
θ(k)可用最小二乘法估計得到:

(16)
(17)
(18)
預測向量f可由式(19)得出:
(19)
在求得G和f后,可計算控制量ΔU的值,從而計算預測輸出值。
3.4 比例積分微分控制算法
比例積分微分(PID)控制器是發展最早的控制方法之一,涉及的算法設計和結構都很簡單,且適用于工程應用。目前,PID控制憑借簡單易懂、適應性強等優勢,仍然在實際生產中獲得廣泛應用。PID控制器根據給定值與實際輸出值構成控制偏差e(t),偏差e(t)與控制量u(t)的關系為:
(20)
式(20)中:Kp為比例系數;Ti為積分時間常數;Td為微分時間常數。
3.5 仿真研究與分析
在對SOFC建模時,選擇ARMAX模型為最終辨識結果,參數可由系統辨識工具箱獲得。ARMAX模型的形式為:
A(q-1)y(t)=B(q-1)u(t)+C(q-1)e(t)
(21)
將式(2)、(3)和(4)辨識出的參數A(q-1)、B(q-1)和C(q-1)代入ARMAX模型的一般形式,整理得到:
y(t)=1.22y(t-1)-0.22y(t-2)+0.99u(t)
+e(t)+0.927e(t-1)
(22)
辨識出的模型采用廣義預測控制算法,通過控制氧氣的流量,研究在外部負載(電流)突然增大或減小時,電池輸出電壓的跟蹤性能。選取設計參數:模型長度p=6,預測時域長度n=6,控制時域長度m=2,控制加權系數λ=0.7,柔化系數α=0.5;最小二乘法參數初始值為:gn-1=1,f(k+n)=1,其余為0,廣義預測控制效果如圖2(a)所示;針對SOFC模型,設計PID控制器,控制效果見圖2(b)。
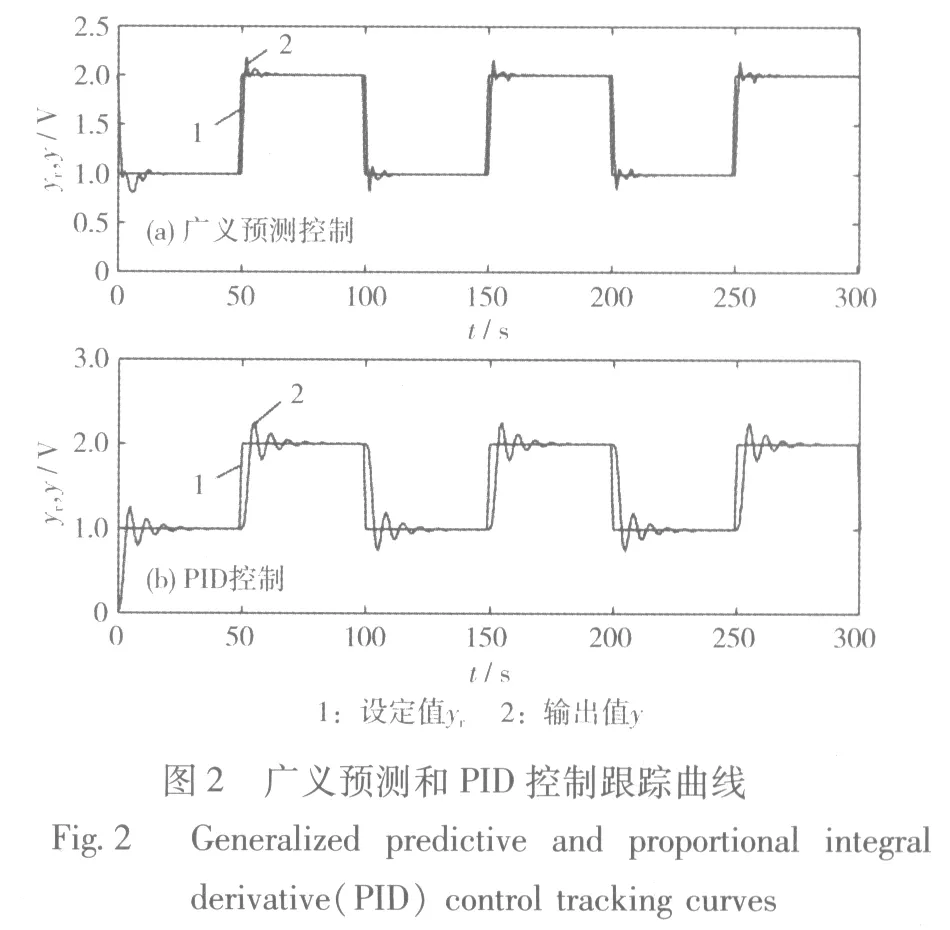
從圖2可知,當系統的設定值發生變化時,兩種算法經過一段時間調節之后,均能達到穩定值,但廣義預測控制算法的調節時間更短,大約為12 s,最大超調量大約為7%,而在PID控制算法下,輸出曲線經過約31 s達到穩定值,最大超調量大約為11%,因此廣義預測控制算法跟蹤給定值的控制效果較好,超調量更小,系統的響應速度更快。與PID控制相比,廣義預測控制算法具有更好的跟蹤性能。
4 總結
本文作者分析了SOFC的反應機理,建立了SOFC的物理模型,從而獲得電池模型的輸入-輸出數據。根據這些數據,再用MATLAB中的系統辨識工具箱辨識SOFC的ARMAX模型。利用系統辨識避開了電池內部復雜的反應機理,使用價值很高。根據辨識得到的ARMAX模型設計廣義預測控制算法,并與經典的PID控制對比。結果表明:當電池的負載發生擾動時,廣義預測控制算法具有更好的跟蹤效果。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
