四擺臂-六履帶機器人單側臺階障礙越障仿真與試驗
2018-06-05 06:54:37王川偉馬宏偉薛旭升田海波
農業工程學報 2018年10期
關鍵詞:分析
王川偉,馬 琨,楊 林,馬宏偉,薛旭升,田海波
(西安科技大學機械工程學院,西安 710054)
0 引 言
農業機器人是一種新型多功能農業機械,可以代替人類在農業環境下作業,以減輕人類的勞作負擔,得到廣泛關注[1-3]。機器人根據行走機構的不同,可分為輪式[4]、腿式[5]、履帶式[6]及仿生式[7]四大類。隨著科技的進步,常歸機器人結構已經滿足不了工業及日常需求,目前已經出現多種混合結構的機器人,如:輪腿機器人[8]、履腿機器人[9]、輪履機器人[10]及特種履帶移動平臺[11-12]。其中,履腿式機器人控制系統相對簡單,并且環境適應能力強,可在復雜環境中完成相應任務,因此得到了更廣泛的研究[13-14]。美國起步較早,美國 iRobot公司研制的Packbot系列小型便攜式履帶機器人[15],采用2擺臂四履帶結構,機器人可借助擺臂完成翻越障礙動作。李允旺等研究了一種四履帶兩擺臂機器人[16],分析了機器人克服臺階、斜坡、溝道等典型障礙的運動機理及其最大越障能力。崔金濤等[17]研究了一種具有差動機構的四履帶式機器人,通過機器人的運動學分析完成了臺階型障礙的越障性能分析。本文將研究具有多姿態變化的四擺臂-六履帶機器人的越障性能,通過機器人的運動學分析,建立機器人重心坐標方程,分析機器人在單側障礙地形下的越障穩定性。
目前,各位學者對履帶腿式機器人越障性能的研究,主要以平面運動學及動力學方式對臺階類垂直越障方面的研究[18-19],主要以俯仰角度的研究來判斷機器人的越障性能。但是機器人在復雜環境下進行探測時,會遇到各種各樣的路面情況[20-23]。機器人往往不會 2條履帶同時越過障礙物,當機器人一側履帶遇到障礙物時,其橫滾角、俯仰角及重心位置都有一定的變化,會影響機器人越障過程的穩定性[24-25]。機器人采用套筒軸傳動形式,使擺臂旋轉運動與履帶輪旋轉運動相互獨立,設計了一種具有四擺臂的六履帶機器人(4SA-6TR),機器人四個擺臂可以自由旋轉,可以實現更多姿態的變化,具有較高的越障能力。以單側臺階障礙地形為例,研究機器人姿態的實時控制策略,即機器人可根據障礙的大小及高度,實時調整機器人四個擺臂的旋轉角度,以實現機器人平穩越障。
1 4SA-6TR機器人結構
1.1 4SA-6TR機器人結構組成
在履帶式機器人結構的研究中,為提高機器人的越障性能,實現多姿態變化,本文全自主研發了 4個擺臂均可自由旋轉360°的4SA-6TR機器人,如圖1所示。機器人由6個電機驅動,其中4個驅動擺臂系統,另外2個分別驅動機器人左、右 2個主履帶,機器人主要參數如表1所示。4SA-6TR機器人主要由左前擺臂系統(left front system,LF)、右前擺臂系統(right front system,RF)、左后擺臂系統(left rear system,LR)、右后擺臂系統(RR)及機器人箱體組成。機器人采用套筒軸結構,使 4個擺臂系統的旋轉運動與 2個行走履帶的旋轉運動相分離,以實現多姿態變化。機器人可以隨時根據地形的變化來調整自身姿態,同時,機器人在調整姿態時不影響機器人正常行走[26]。
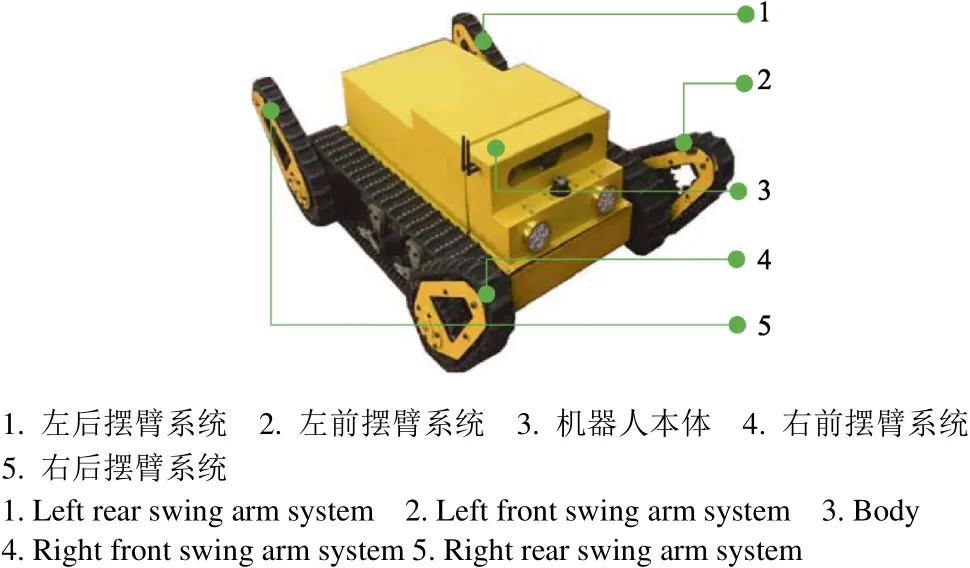
圖1 四擺臂-六履帶機器人樣機Fig.1 4 SA-6TR robot prototype
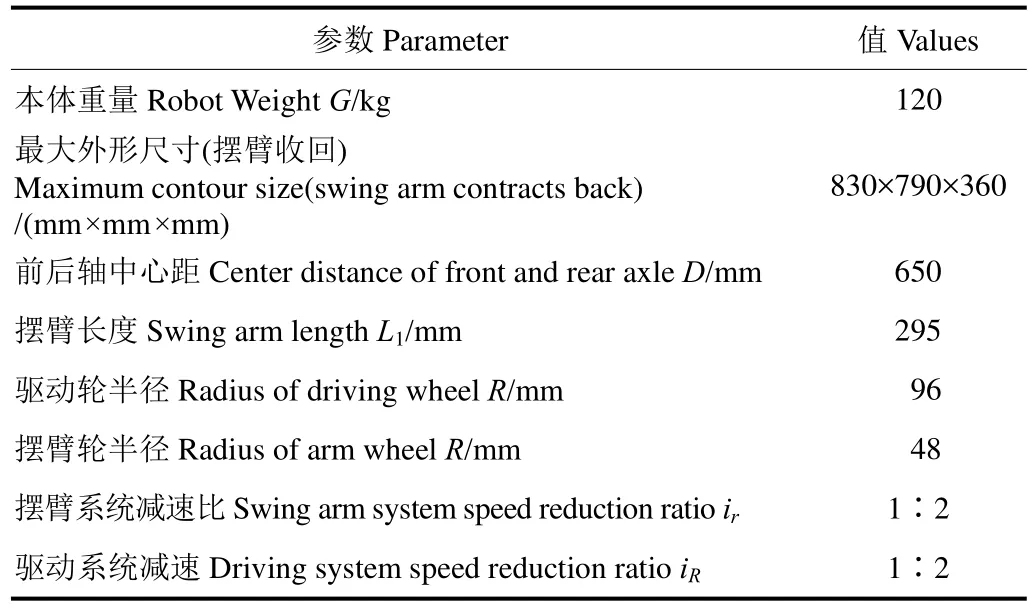
表1 機器人主要參數Table 1 Main parameters of robot
1.2 4SA-6TR機器人傳動原理
4SA-6TR機器人的傳動系統圖如圖2所示,其傳動系統主要分為擺臂系統及行走系統,由擺臂軸與套筒軸2個可獨立旋轉的部件把 2個系統的動力相互隔離開,形成2個相互獨立的傳動系統。
機器人擺臂系統工作原理為:機器人擺臂電機通過擺臂小、大齒輪及擺臂軸,把動力傳遞給擺臂外支架,以實現機器人擺臂 360°旋轉。機器人行走工作原理為:機器人主履帶電機通過主履帶小、大齒輪及套筒軸,把動力傳遞給主履帶輪,主履帶輪再通過主履帶及擺臂履帶把動力分別傳遞給從履帶輪及擺臂履帶輪,以實現機器人正常行駛。
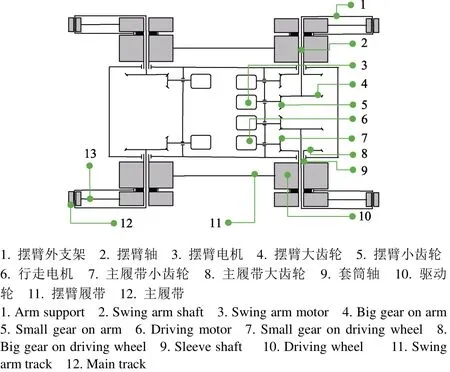
圖2 4SA-6TR機器人傳動系統Fig.2 Transmission systems of 4SA-6TR robot
由于機器人所需要的電機個數較多,同時要求機器人整體質量要小,因此,本文選擇了功率密度較大的Maxon無刷直流電機。同時由于2個傳動系統對電機要求不同,機器人行走驅動系統的電機要求有較高的速度,而擺臂系統的電機要求電機的旋轉能夠支撐機器人,實現機器人多姿態變化。機器人行走驅動系統的電機與擺臂系統的電機參數會有所不同,其主要參數如表2所示。
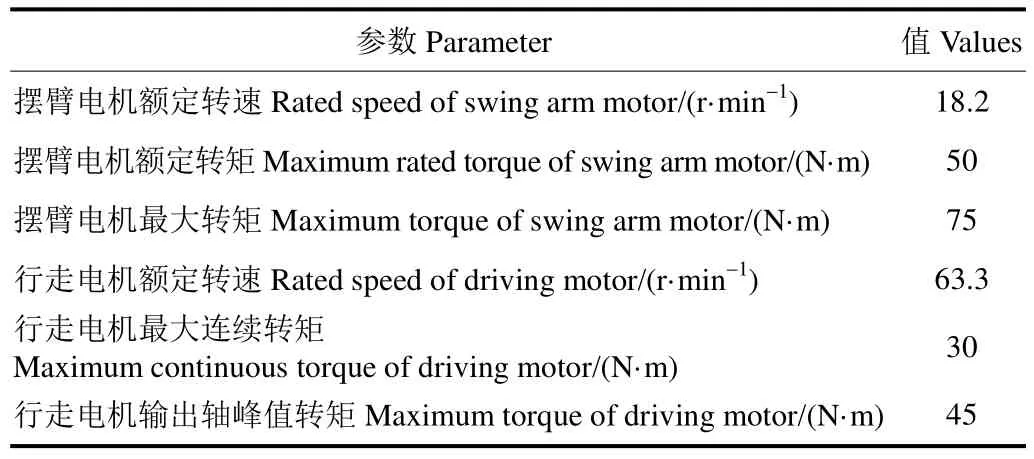
表2 4SA-6TR機器人電機主要參數Table 2 Main parameters of 4SA-6TR rotot motor
2 4SA-6TR機器人運動學分析
2.1 坐標系的建立
在對4SA-6TR機器人越障運動學進行分析時,可把機器人看作是1個自由關節與4個關節并聯連接起來的連桿構成[23]。應用機器人學中的D-H坐標變化方法,建立坐標系,如圖3所示。機器人全局坐標系為∑O- xyz;機身箱體中截面與后擺臂旋轉中軸線的交點建立機身坐標系 ∑ O0- x0y0z0,右后擺臂旋轉軸中心及右前擺臂旋轉軸中心分別建立坐標系 ∑ O1- x1y1z1、 ∑ O2- x2y2z2,另外2個擺臂可用相同理論計算,因此在本文不再詳細論述。

圖3 機器人坐標系Fig. 3 Robot coordinate
由圖 3坐標系可推得機器人在運動時各部件之間的關系矩陣如下:
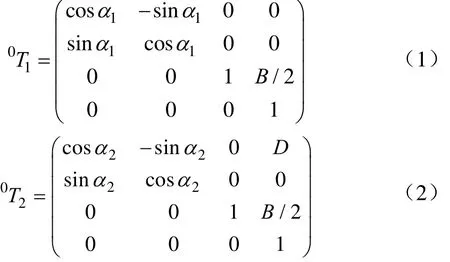
式中0T1表示右后擺臂軸相對于機身的位姿坐標,0T2表示右前擺臂軸相對于機身的位姿坐標,α為機器人擺臂旋轉角度,(°)。D表示機器人前后輪軸中心距,mm,B表示機器人機身寬度(機器人最大輪廓寬度),mm。
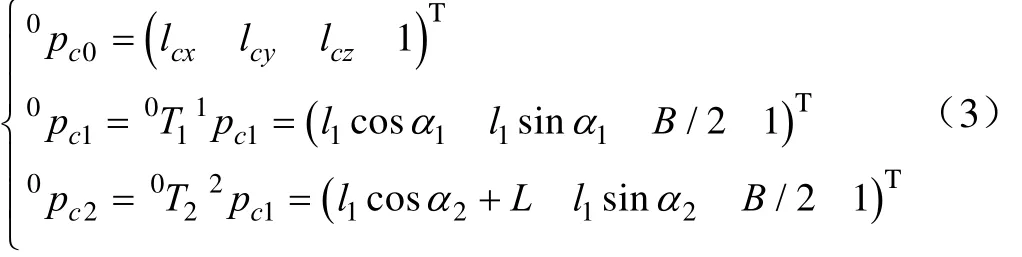
2.2 4SA-6TR機器人重心坐標求解
在研究機器人運動學時,假設機器人4個擺臂前后、左右結構完全對稱,且4個擺臂系統質量相等,m1表示機器人擺臂質量(主要包括外支撐臂、內支撐臂、擺臂輪、履帶等部件質量之和);機器人箱體質量m0(主要包括電池、工控機、驅動器、傳感器、電機、齒輪、主履帶、履帶輪及箱體等部件質量之和)。L1表示機器人擺臂長度(擺臂驅動軸與擺臂輪之間的距離)。lcx、lcy、lcz表示箱體重心x、y、z方向的位置,l1表示擺臂重心位置,表示機器人箱體重心坐標,0p 、0p 、0p 、0pc1c2c3c4機器人擺臂重心坐標。因此機器人箱體及前、后擺臂重心的位置坐標可表示為:
由重心定理,可知某物體的重心方程為:
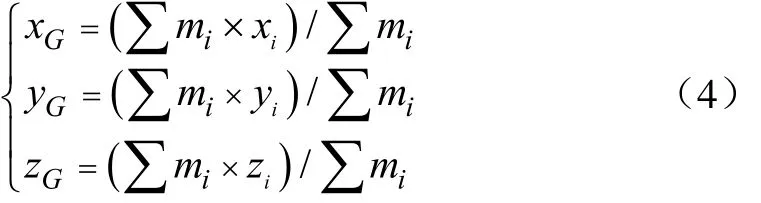
式中i=1,2,3……n,為各零部件的個數,m表示各零部件的質量,Gx、Gy、Gz分別表示物體的坐標。
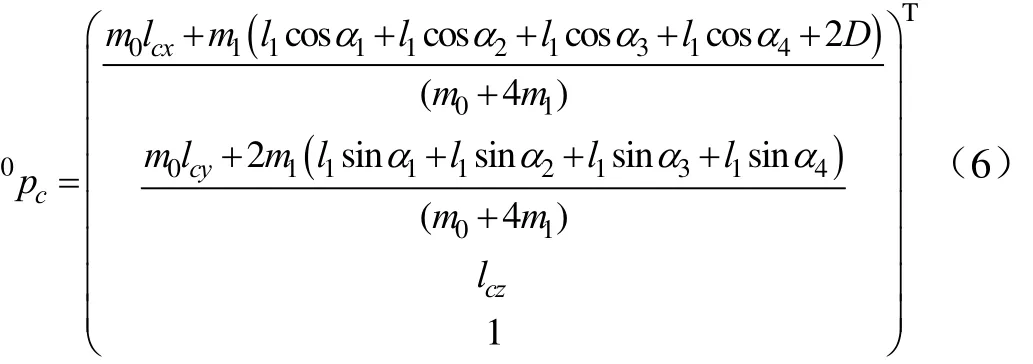
因此,借助于由重心定理,可得機器人的重心方程為:

可得機器人重心在箱體坐標系下有:
2.3 機器人姿態穩定性分析
機器人穩定性的研究主要有重心投影法(CoG,centre of gravity)及零力矩點法(ZMP,zero moment point)[27-29],靜態穩定邊界法(SSM,static stability margin),能量穩定邊界方法(ESM,energy stability margin)[30]。ZMP主要應用于雙足機器人的動態穩定性中,由于機器人為 4擺臂結構,機器人與地面可以有多個點接觸,因此,本文將應用 CoG法對機器人的靜態穩定性進行分析。在對4SA-6TR機器人穩定性的研究中,根據三點確定一個穩定平面、兩平行線確定一個穩定平面及一點和一線確定一個穩定平面的原理,分析機器人的運動姿態,機器人可實現22種不同組合的穩定姿態形式,機器人常用越障姿態如圖4所示。

圖4 機器人常用越障姿態Fig.4 Abstacle-surmounting posture robots commonly used
機器人在行駛過程中,為了實現平穩越障,需要機器人實時自主辨識機器人行駛過程中其重心、轉動慣量等關鍵參數的變化情況。以機器人前右擺臂及后面 2個驅動輪同時接觸地面,以三點確定一個穩定平面的穩定姿態進行分析,如圖 5所示。當機器人的重心 CoG在地面上的投影CoG1在機器人確定的穩定三角形ABC區域內時,可以判定機器人行駛是穩定的。當機器人前右擺臂 C點滑移到 C1點時,CoG1落在三角形 ABC1區域外時,機器人會沿 AC1線發生翻滾,則機器人不穩定。

圖5 機器人重心投影圖Fig.5 Barycentric projection of robot
3 4SA-6TR機器人單側障礙越障性能分析
3.1 機器人越障矩陣求解
對 4SA-6TR機器人單側臺階障礙地形運動控制的研究,在擺臂輪與路面的接觸點建立坐標系 ∑ O3- x3y3z3,圖中擺臂長度為L1,臺階高度為H,擺臂旋轉角度為α。
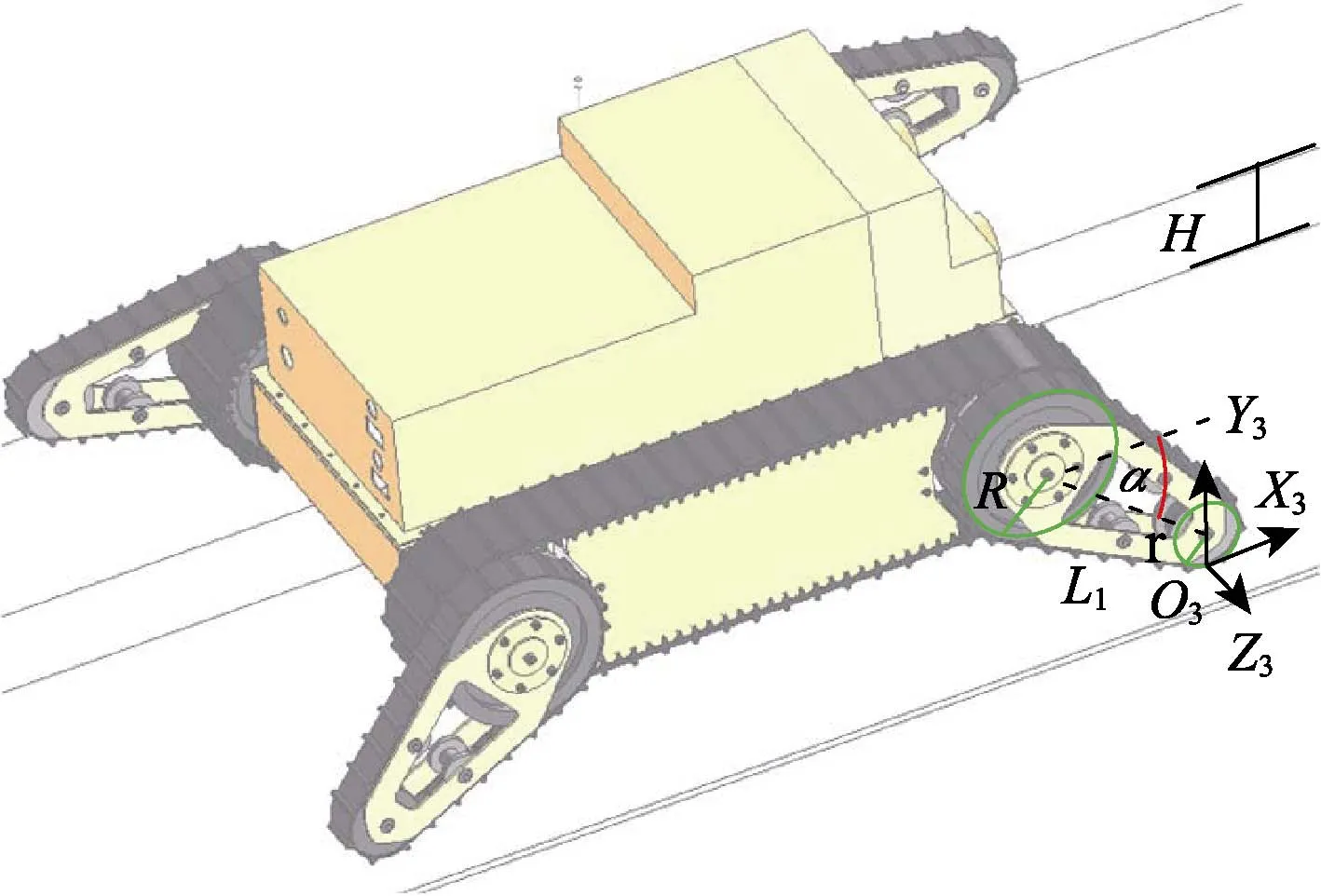
圖6 單側臺階障礙坐標系Fig.6 Unilateral step obstacle coordinate
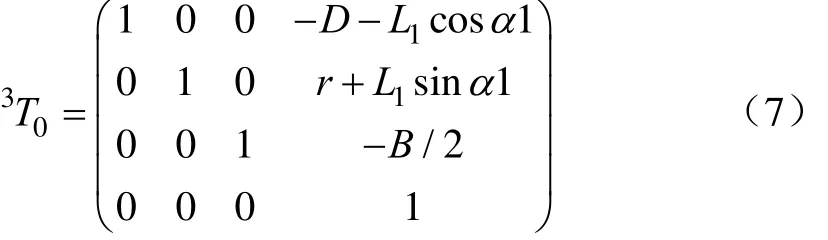
根據圖 6所示,機器人箱體坐標系相對于前擺臂輪的坐標為:
可得機器人擺臂與地面的接觸點在箱體坐標系下的坐標為:

3.2 單側障礙越障穩定性分析
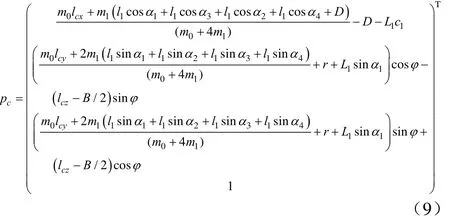
當機器人在樊越單側障礙時,可得機器人重心坐標為:
令(lcz- B / 2 ) cφ= 0 ,機器人重心與前擺臂坐標系的X軸重合,此時機器人橫滾角度最大(φmax),因此可得機器人可攀爬單側障礙的高度為:

因此,當單側臺階障礙高度滿足 H <Hmax時,可得機器人擺臂角度與機器人橫滾角度的關系式為:

在單側障礙環境下,當臺階高度 H < L1+r- R 時,機器人可以實現機身水平越障。當臺階高度滿足L1+r- R ≤ H ≤ Hmax時,機器人會發生傾斜,但還是能夠穩定行駛。因此機器人要實現平穩運行,在臺階高度H為任意值時,擺臂旋轉角度需要滿足關系式:

4 4SA-6TR機器人越障性能仿真分析
4.1 仿真環境參數設置
通過Soliworks完成了4SA-6TR機器人及其地形的三維造型設計,按1:1的比例將簡化后的模型導入Adams虛擬樣機仿真軟件,得到機器人越障及地形的虛擬樣機仿真環境。機器人結構參數為L1=295 mm,R=96 mm,r=48 mm,B=790 mm,L=830 mm。由于機器人行走輪的半徑為96 mm,當障礙物的高度大于96 mm時,對于普通輪式機器人就很難越過,因此,為體現機器人的越障性能,本文以H=150 mm及H=100 mm的組合單側臺階型障礙對機器人的越障性能進行仿真分析。
機器人在攀越單側障礙時,其橫滾角φ及俯仰角θ會發生變化。為使機器人實現平穩越障,機器人在越障過程中,其俯仰角及橫滾角要盡可能快地恢復到初始狀態,其擺臂就需要旋轉一定的角度,使機器人恢復到水平狀態。由于 H = 150 < L1+r- R =247mm,機器人在臺階面上要保持水平,將機器人的相關參數代入式(12),機器人擺臂旋轉的角度分別為α=42.2°及30.1°,其具體變化過程還需要根據越障過程進行調整。此角度值為機器人擺臂與水平方向的幅值角度,而非相量角度,要根據障礙位置情況再確定機器人各個擺臂的旋轉方向。
4.2 仿真試驗
對機器人的巡檢速度要求一般是 2000 m/h,由于4SA-6TR機器人在越障過程中,其行駛速度不能太快,本文以 v=600 m/h(約 166 mm/s)的行駛速度進行仿真分析。把相關參數代入仿真模型,實時控制機器人擺臂的旋轉角度,得到機器人在 2個不同高度單側障礙上完成上臺階及下臺階運動過程,如圖7a~7h所示。其中圖7a~7d為150 mm臺階越障過程,圖7a為機器人越障前準備,其前面2個擺臂向上旋轉30°,后擺臂向上旋轉20°;圖7b表示機器人的俯仰角發生了變化,圖7c表示機器人為了爬下150 mm的臺階,通過姿態調整,其橫滾角又發生了變化。圖7d表示機器人通過對機器人擺臂旋轉角度的調整,實現了第1次調平。圖7e為機器人從150 mm臺階下降到100 mm臺階的姿態調平過程。從圖7中可以看出,通過對機器人 4個擺臂旋轉角度的不斷調整,機器人的箱體在越障過程中始終保持在水平狀態。圖 7f~7g為機器人從100 mm臺階下降到平坦路面的過程,實現了平穩下臺階的運動。
4SA-6TR機器人在雙重臺階型障礙時,其4個擺臂根據障礙的高度、位置及機器人的行駛速度進行實時調整,其各擺臂旋轉角度的變化如圖8所示。
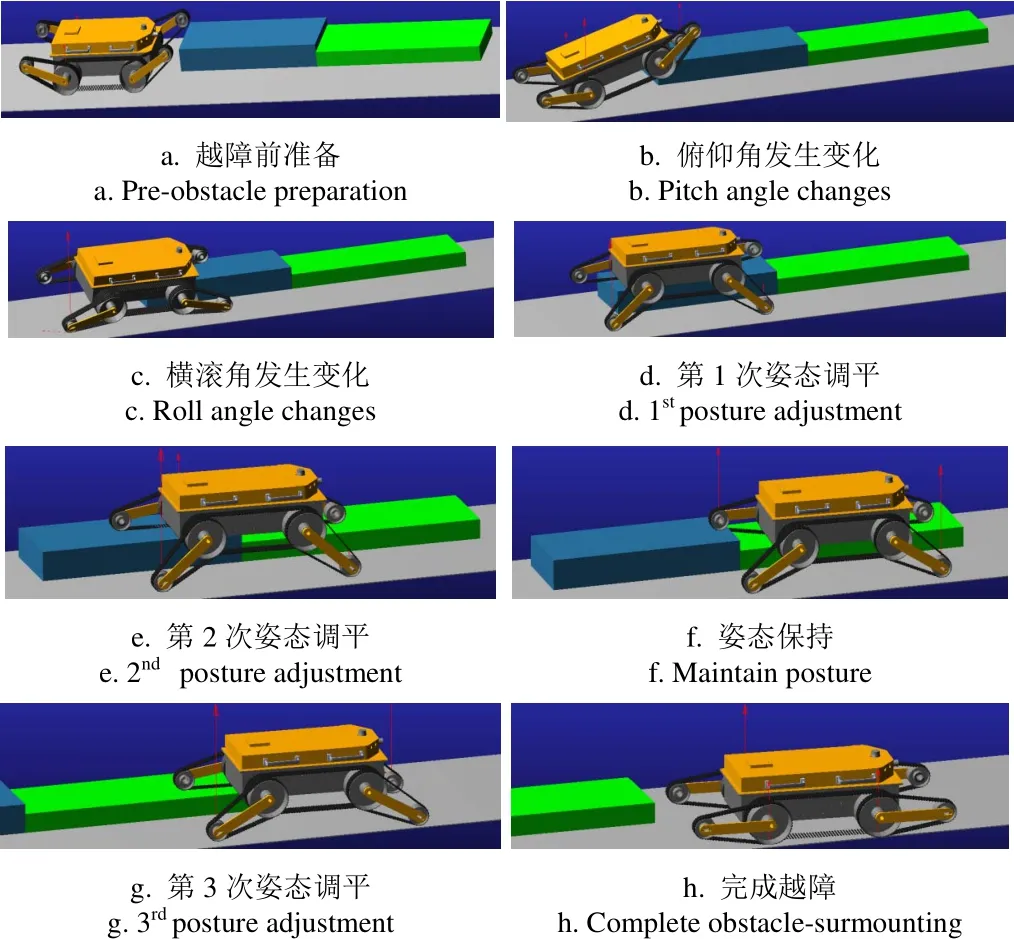
圖7 機器人越障仿真試驗Fig.7 Simulation test of robot obstacle-surmounting

圖8 機器人4個擺臂角度隨時間的變化Fig.8 Angle of robot's 4 swing arms varies with time
5 4SA-6TR機器人攀爬單側臺階障礙試驗
5.1 測試試驗
障礙地形選取室內高度為 150 mm的臺階,根據ADAMS的仿真結果將機器人越障的電機驅動控制曲線編譯到控制程序中,完成4SA-6TR機器人的越障姿態控制。機器人相關試驗均在實驗室內完成,完成 3次越障測試實驗,測試時間約10 s。機器人擺臂旋轉角度通過機器人擺臂驅動電機的旋轉編碼器測得,而機器人機身的俯仰角及橫滾角度利用三維數字羅盤測得。
機器人在越障試驗中,機器人的初始姿態為前擺臂向上抬起30°,如圖9a所示。當前履帶輪到達臺階時,機器人受重心位置的影響下機器人橫滾角度發生變化,其姿態如圖 9b所示。機器人的橫滾角度發生變化后,為使機器人機器人保持水平,需要其左前擺臂向下支撐,使機器人的橫滾角度恢復到正常狀態,其擺動角度需要隨著機器人向前移動而發生改變,其姿態如圖9c所示。當機器人的橫滾角度恢復到正常狀態時,為使它的俯仰角度恢復到正常狀態,需要其左后擺臂向下支撐,其擺動角度需要隨著機器人向前移動而發生改變,機器人擺臂姿態控制如圖9d所示。當機器人的右后履帶輪接觸到臺階時,其右后擺臂需要向上抬起與臺階上表面相平,其姿態如圖9e所示。
5.2 試驗分析
4SA-6TR機器人在完成單側臺階越障過程中,其俯仰角度及橫滾角度變化如圖10所示。從圖10中可以看出,為實現150 mm臺階的平穩越障,機器人在2.5~5.5 s越障階段,其俯仰角度及橫滾角度均發生很大的變化。其中,機器人俯仰角度達到 17.2°,而其橫滾角度達到16.6°。其中,俯仰角度的偏差較大,在a點時偏差了2.4°,最終通過機器人姿態的調整,俯仰角度穩定在0.1°左右,整個越障過程中的均值誤差為 0.09;機器人的橫滾角度在b點時出現1.1°的偏差,最終通過機器人姿態的調整,機器人的橫滾角度穩定在0.3°左右,整個越障過程中的均值誤差為 0.11。通過對機器人的姿態控制,達到了平穩越障的控制要求。

圖9 機器人越障測試試驗Fig.9 Experiment of robot obstacle-surmounting

圖10 機器人越障測試試驗分析Fig.10 Experiments analysis of robot obstacle-surmounting
通過對4SA-6TR機器人擺臂旋轉角度的控制,機器人可以根據臺階的高度、位置及機器人行駛速度情況,利用其 4個擺臂實時調整機器人姿態,使機器人箱體恢復到近水平狀態,實現了機器人平穩越障,說明機器人在面對單側臺階障礙地形時,以此控制策略對 4SA-6TR機器人進行越障進行實時控制,其方案是可行的。
6 結 論
1)本文研究了一種具有四擺臂的六履帶機器人(4SA-6TR),履帶機器人采用套筒軸結構,使4個擺臂系統的旋轉運動與 2個行走履帶的旋轉運動相分離,可實現多姿態變化。
2)通過對4SA-6TR機器人運動姿態分析,借助重心定理得到了機器人在全局坐標系下的重心坐標方程。并建立了機器人擺臂旋轉角度與機器人橫滾角度關系的數學模型,完成了機器人單側障礙地形的越障性能分析;對公式進行推導,得到機器人在攀越單側臺階穩定行駛時機器人各擺臂旋轉角度α與臺階高度H的關系方程式。
3)建立了4SA-6TR機器人虛擬樣機模型,完成了單側臺階高度為150 及100 mm雙重單側臺階障礙的越障仿真試驗。最后把 ADAMS的仿真結果將機器人電機驅動控制曲線編譯到控制程序中,通過機器人姿態控制,完成了150 mm障礙的測試試驗。通過室內測試試驗,發現機器人的俯仰角度偏差較大,最大偏差為2.4°,機器人越障后的俯仰角度穩定在0.1°左右,整個越障過程中的均值誤差為0.09;而越障后的橫滾角度穩定在0.3°左右,整個越障過程中的均值誤差為0.11,最終實現了平穩越障。通過仿真及試驗說明4SA-6TR機器人在面對單側臺階障礙地形時,本文中所采用的控制策略是可行的。
[1] 朱巖,王明輝,李斌,等. 履帶可變形機器人越障性能研究[J]. 機器人,2015,37(6):55-63.Zhu Yan, Wang Minghui, Li Hui, et al. On obstaclesurmounting performance for a transformable tracked robot[J]. Robot, 2015, 37(6): 55-63. (in Chinese with English abstract)
[2] 孫治博,劉晉浩,于春戰,等. 變幅輪腿機器人智能越障步態規劃與平穩性分析[J]. 農業工程學報,2015,31(16):1-7.Sun Zhibo, Liu Jinhao, Yu Chunzhan, et al. Stability analysis and gait planning for luffing wheel-legged robot during intelligent obstacle-surmounting process[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2015, 31(16): 1-7. (in Chinese with English abstract)
[3] 牛建業,王洪波,史洪敏,等. 變自由度輪足復合機器人軌跡規劃驗證及步態研究[J]. 農業工程學報,2017,33(23):38-47.Niu Jianye, Wang Hongbo, Shi Hongming, et al. Trajectory planning verification and gait analysis of wheel-legged hybrid robot with variable degree of freedom[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2017, 33(23): 38-47. (in Chinese with English abstract)
[4] 宋小康,談大龍,吳鎮煒,等. 全地形輪式移動機器人運動學建模與分析[J]. 機械工程學報,2008,44(6):148-154.Song Xiaokang, Tan Dalong, Wu Zhengwei, et al.Kinematics modeling an analyses of all-terrain wheeled mobile robots[J]. Chinese Journal of Mechanical Engineering,2008, 44(6): 148-154. (in Chinese with English abstract)
[5] Hoffmann Matej, Simanek Jakub. The merits of passive compliant joints in legged locomotion: fast learning, superior energy efficiency and versatile sensing in a quadruped robot[J]. Journal of Bionic Engineering, 2017, 14(1): 1-14.
[6] 芮強,王紅巖,王欽龍,等. 履帶車輛轉向性能參數分析與試驗研究[J]. 機械工程學報,2015,51(12):127-136.RuiQiang, Wang Hongyan, Wang Qinlong, et al. Research on the acquisition of steering performance parameters of armored vehicle based on experiments[J]. Chinese Journal of Mechanical Engineering, 2015, 51(12): 127-136. (in Chinese with English abstract)
[7] Wei hsichen, Hung shenglin, Yun menglin, et al. Turboquad:a novel leg-wheel transformable robot with smooth and fast behavioral transitions[J]. Ieee Transactions on Robotics, 2017,33(5): 1025-1040.
[8] 田海波,方宗德,古玉鋒. 輪腿式機器人越障動力學建模與影響因素分析[J]. 機器人,2010,32(3):390-397.TianHaibo, Fang Zongde, GuYufeng. Dynamic modeling for obstacle negotiation of wheel-legged robotand analysis on its influential factors[J]. Robot, 2010, 32(3): 390-397. (in Chinese with English abstract)
[9] 饒偉,施家棟,王建中. 關節式履帶機器人爬樓梯動態穩定性分析[J]. 機械工程學報,2014,50(15):66-73.Rao Wei, Shi Jiadong, Wang Jianzhong. Analysis of dynamic stability for articulated-tracked robot climbing stairs[J].Chinese Journal of Mechanical Engineering, 2014, 50(15): 66-73. (in Chinese with English abstract)
[10] 黃濤,張豫南,田鵬,等. 一種履帶式全方位移動平臺的設計與運動學分析[J]. 機械工程學報,2014,50(21):212-218.Huang Tao, Zhang Yunan, Tian Peng, et al. Design &kinematics analysis of a tracked omnidirectional mobile platform[J]. Chinese Journal of Mechanical Engineering,2014, 50(21): 212-218. (in Chinese with English abstract)
[11] Stéphanebazeille, Jesusortiz, Francescorovida, et al. Active camera stabilization to enhance the vision of agile legged robots[J]. Robotica, 2015, 35(4): 942-960.
[12] 朱巖,王明輝,李斌,等. 基于目標規劃的履帶可變形機器人結構參數設計及驗證[J]. 農業工程學報,2016(14):39-46.Zhu Yan, Wang Minghui, Li bin, et al. Mechanismparameters design and validation of transformable tracked robot based on goal programming[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016(14): 39-46. (in Chinese with English abstract)
[13] Wang Chuanwei, Ma Hongwei, Ma Kun, et al. Simulation study of steering control of the tracked robot based on slip and skid condition[C]//Ubiquitous Robots and Ambient Intelligence, 2016 13th International Conference On. IEEE,2016: 140-143.
[14] 劉斌,王志福. 履帶車輛動力系統發展綜述[J]. 四川兵工學報,2014,35(1):68-72.Liu Bin, Wang Zhifu. Overview of power system development of tracked vehicle[J]. Journal of Sichuan Ordnance, 2014, 35(1): 68-72. (in Chinese with English abstract)
[15] 帥立國,蘇慧哲,鄭麗媛,等. 輪-履式移動機器人履帶轉向運動[J]. 哈爾濱工程大學學報,2017 (10) :1630-1634.Shi Liguo, Su Huizhe, Zhen Liyuan, et al. Study on steering movement of track-wheel mobile robot[J]. Journal of Harbin Engineering University, 2017 (10): 1630-1634. (in Chinese with English abstract)
[16] 李允旺,葛世榮,朱華,等. 四履帶雙擺臂機器人越障機理及越障能力[J]. 機器人,2010,32(2):157-165.Li Yunwang, Ge Shirong, Zhu Hua, et al. Obstaclesurmounting mechanism and capability offour-track robot with two swing arms[J]. Robot, 2010, 32(2): 157-165. (in Chinese with English abstract)
[17] 崔金濤,全偉才. 具有差動機構的履帶式機器人設計與分析[J]. 內蒙古農業大學學報(自然科學版),2017(3):71-75.Cui Jintao, Quan Weicai. Designand analysis of crawler- type robotwith differential mechanism[J]. Journal of Inner Mongolia Agricultural University (Natural Science Edition),2017(3): 71-75. (in Chinese with English abstract)
[18] 李智卿,馬書根,李斌,等. 具有自適應能力輪—履復合變形移動機器人的開發[J]. 機械工程學報,2011(5):1-10.Li Zhiqin, Ma Shugeng, Li Bin, et al. Development of a transformable wheel-track robot with self-adaptive Ability[J].Chinese Journal of Mechanical Engineering, 2011(5): 1-10.(in Chinese with English abstract)
[19] 邊浩然,資新運,王洪濤,等. 基于變形履帶的搜救偵察機器人設計與試驗[J]. 兵器裝備工程學報,2017 (3):143-146.Bian Haoran, Zi Xinyun, Wang Hongtao, et al. Design and experiment of a rescue-search robot based on deformable track[J]. Journal of Sichuan Ordnance, 2017 (3): 143-146.(in Chinese with English abstract)
[20] Qiao G, Song G, Zhang Y, et al. A wheel-legged robot with active waist joint: design, analysis, and experimental results[J]. Springer Netherlands, 2016, 83(3): 485-502.
[21] Kim Inho, Jeon Wonseok, Yang Hyunseok. Design of a transformable mobile robot for enhancing mobility[J]. SAGE Publications, 2017, 14(1).
[22] Ding Xilun, Zheng Yi, Xu Kun. Wheel-legged hexapod robots: a multifunctional mobile manipulating platform[J].Chinese Mechanical Engineering Society, 2017, 30(1): 3-6.
[23] Zhong W, Guangming S, Guifang Q, et al. Design and implementation of a leg–wheel robot: Transleg[J]. Journal of Mechanisms and Robotics, 2017, 9(5).
[24] Chen Zhijun, Gao Feng, Pan Yang. Novel door-opening method for six-legged robots based on only force sensing[J].Chinese Journal of Mechanical Engineering, 2017(5): 1227-1238.
[25] 王亞,陳思忠,李海濤,等. 高地面仿形性動力底盤的設計與試驗[J]. 農業工程學報,2012 (S1): 39-44.Wang Ya, Chen Sizhong, Li Haitao, et al. Design and experiment of high performance profiling terrain chassis with power train[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012(S1): 39-44. (in Chinese with English abstract)
[26] 王川偉,馬宏偉,尚萬峰. 煤礦探測機器人垂直越障性能研究[J]. 煤礦機械,2014,35(6):61-64.Wang Chuanwei, Ma Hongwei, Shang Wanfeng. Obstaclesurmounting height analyzing of coal mine detecting robot[J].Coal Mine Machinery, 2014, 35(6): 61-64. (in Chinese with English abstract)
[27] Ning M, Xue B, Ma Z, et al. Design, analysis, and experiment for rescue robot with wheel-legged structure[J].Mathematical Problems in Engineering, 2017.
[28] Luo Yang, Li Qimin, Liu Zhangxing. Design and optimization of wheel-legged robot: Rolling-Wolf[J].Chinese Mechanical Engineering Society, 2014, 27(6): 1133-1142.
[29] Suzumura A. Real-time motion generation and control systems for high wheel-legged robot mobility[J]. IEEE Transactions on Industrial Electronics, 2014, 61(7): 3648-3659.
[30] 田海波,方宗德,周勇,等. 輪腿式機器人傾覆穩定性分析與仿真[J]. 系統仿真學報,2009 (13) :4032-4037.Tian Haibo, Fang Zongde, Zhou Yong, et al. Analysis and simulation for wheel-legged robot tumble stability[J]. Journal of System Simulation, 2009(13): 4032-4037. (in Chinese with English abstract)
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
