玉米缽苗頂出式有序分秧機構的設計與試驗
2018-06-01 08:46:02尹大慶張心雨周脈樂
農業工程學報 2018年9期
尹大慶,張 爍,辛 亮※,張心雨,,周脈樂
(1. 東北農業大學工程學院,哈爾濱 150030;2. 雷沃重工股份有限公司天津雷沃阿波斯技術中心,天津 300402)
0 引 言
玉米是全世界分布最廣的糧食作物之一,在糧食安全問題中占有極其重要的地位[1]。玉米缽苗移栽較直播可以大幅度提高玉米單產,一般可提高產量 10%以上;缽苗大棚育秧,與大田播種相比發芽率不受春旱和春澇的影響;在黑龍江、吉林等地,這一技術相當于可以增加玉米生長大約 200 ℃的積溫,可以選擇積溫更高的玉米品種,從而大幅度提高玉米的產量和品質;同時,缽苗移栽可使玉米大田生長期減少10 d左右,解決了前后茬作物生長期相加積溫不夠的矛盾[2-3]。
旱田缽苗移栽機械,主要有半自動和全自動 2種。半自動缽苗移栽機[4-9]主要依靠人工分秧,勞動強度大,工作效率低,難以用于玉米移栽。而全自動旱田缽苗移栽技術與裝備主要為歐共體和日本處于國際領先地位。歐共體30多年前迫于經濟作物缽苗移栽的需求,當時正值信息化技術帶動了機電一體化的發展[10-13],研究人員將信息化技術帶來的單片機、電磁閥、氣缸組成機械手開發了取秧裝置,用帶傳動開發了輸送裝置,栽植裝置一般采用鴨嘴式栽植器。為了提高機器的作業效率,采用增加取秧機械手數量的方式完成,從而使成本大幅增高,因此,該種機型主要用于煙草、蔬菜、花卉[14-17]等經濟作物的移栽,不適用于大田作物移栽。例如 Hakli等[18]研制的將頂出裝置和夾持機構組合形成取苗機構,將成排取出的缽苗放置到輸送帶后進行栽植。而日本在此基礎上進行發展,例如 Choi等[19]和 Nakashima等[20]分別提出了曲柄滑道式和行星輪驅動滑道機械手式取苗裝置進行單體取缽秧,均采用滑道機構控制取秧軌跡與姿態,然后將缽苗落入栽植器進行栽植,滑道機構影響了機構的效率。Ye Bingliang等[21]提出了回轉式旱田缽苗移栽機構,雖用一個機構就完成整個缽苗移栽過程,但由于其取苗過程需配合間歇式送秧機構靜止從而完成取苗,因此影響了移栽效率。
為了提高大田玉米缽苗移栽的工作效率、降低裝備成本,本文研制一種杠桿頂出式有序分秧機構,采用連續送秧與杠桿快速頂出的方式進行取苗作業。對機構進行結構設計,提出關鍵核心杠桿輪廓曲線的設計方法,并對機構進行運動學與動力學仿真分析,最后建立物理樣機進行臺架試驗和田間試驗驗證。
1 頂出式有序分秧機構的結構和工作原理
當送秧機構為間歇運動時,會導致作業效率低,為了解決這個問題,頂出式有序分秧機構所應用的送秧機構采用連續運轉的方式。由于連續頂出式分秧機構在頂桿頂出缽苗和返回的過程中,秧盤一直在縱向運動,這就要求頂桿頂出缽苗的時間必須很短,同時要求缽盤底部的孔要比頂桿直徑大,允許有足夠的時間使頂桿在返回的過程中不會碰到缽盤。
杠桿頂出式有序分秧機構[22-23]主要由撥桿、杠桿、頂桿、彈簧、缽盤以及缽盤驅動輪等組成。為了實現頂桿快速將缽苗頂出后迅速收回,即撥桿對杠桿的作用控制在很短時間內完成,因此,本機構在撥桿和頂桿之間加了一個杠桿,通過利用較大的杠桿比,將頂桿較大的線位移轉換為杠桿較小的角位移。
具體結構如下:機構在撥桿軸上橫向均布安裝 8個結構相同的撥桿,有序安裝的撥桿間相位角差為 45°,8個撥桿分別對應8個杠桿,8個杠桿又分別對應縱向距離差相同的8個頂桿,而8個頂桿則分別對應著連續縱向送秧機構中縱向運動的缽盤中同一排的 8棵缽苗。撥桿軸轉動1周,秧盤勻速縱向下移40 mm(即2排缽苗間距),由于缽盤中一排秧苗為8棵,每行缽苗從中間開始逐漸到兩邊的頂出順序,因此按照順序排列的 2個頂桿之間的縱向高度差為5 mm,而撥桿的軸間距則通過塑料缽盤缽體的間距確定,如圖 1所示。其工作原理如下:動力通過撥桿驅動軸帶動8個均布安裝的撥桿勻速旋轉,同時縱向連續送秧機構與撥桿驅動軸聯動,使縱向送秧機構帶動秧盤縱向勻速送秧,當每個撥桿逐次撥動對應的杠桿擺動,擺動的杠桿推動其對應的頂桿,頂桿將與其對應的缽苗通過秧盤底孔快速頂出,頂出后在彈簧的作用下使頂桿迅速復位,完成 1次分秧動作;隨后機構逐次有序的完成以上動作,使各自對應的頂桿頂出連續縱向運動的缽苗。該機構撥桿驅動軸旋轉一周可有序的頂出 8棵缽苗,被頂出的缽苗經導苗裝置有序導入田中同一栽植行中完成栽植,工作原理如圖1c所示。

圖1 頂出式有序分秧機構結構和工作原理示意圖Fig.1 Sketch and working schematic of mechanism of push-out orderly separating seedling
2 機構的理論參數確定
2.1 相關結構參數確定
為了將玉米缽苗快速而有規律的從缽盤中連續頂出且不發生干涉,頂出過程則會產生較大的加速度,同時缽苗土缽與缽盤之間還有一定的黏著力,因此頂桿能否將缽苗頂出而不扎入缽體是設計頂桿運動的關鍵。因此,本文前期對玉米缽苗頂出力與扎入力進行一系列試驗,得出當玉米缽苗含水率為 18%時,利于頂出秧苗,且隨著頂桿位移的增加受到的力也線性增大,當力達到一定值時增加放緩或不再增加后突然減小。最終結合缽苗秧盤底孔尺寸以及頂出規律,選取直徑為8 mm的頂桿,可以實現頂出位移達到5 mm前均可以將缽苗從缽體中頂出。
同時為了實現頂出機構與勻速連續送秧機構配合,準確地將頂桿所對應的缽苗從秧盤中頂出,機構采用設計撥桿軸和秧盤驅動軸連續轉動速比為24∶1,即撥桿軸每勻速旋轉1圈,秧盤驅動裝置勻速旋轉15°,秧盤縱向送秧40 mm,實現同排缽苗有序地將8 棵缽苗頂出,因此按照順序設計相鄰頂桿之間的縱向高度差為5 mm。但由于同排缽苗并不是同一時間被頂出,第1棵缽苗與第8棵缽苗具有一定的高度差,考慮缽盤兩端的缽苗被頂出后,通過導苗裝置最終要歸到中間位置再栽植到田間,因此每行缽苗設計從中間 2棵開始頂出,逐漸過渡到兩邊的頂出順序。
為了實現頂出式有序分秧機構快速、有效地將缽苗全部頂出,將頂桿所需要的線位移轉換為杠桿的角位移時,杠桿的設計是關鍵。首先對撥桿與杠桿進行了運動學模型分析。由于本文采取 8個相同的撥桿,對杠桿進行依次撥動,因此每個撥桿對應杠桿的輸入力臂相同,當處于最高位置的頂桿頂出行程滿足頂出缽苗所需的最小行程即可保證全部頂桿要求。
以撥桿驅動軸中心點 O為原點建立直角坐標系XOY,如圖2所示。撥桿作為主動件逆時針轉動,1是撥桿最大極徑端點所在圓周,其最大極徑的長度為l1,2是杠桿輸入力臂最大極徑端點所在圓周,其極徑長度 l2,3是杠桿輸出力臂最大極徑端點所在圓周,其極徑長度l3,點B為撥桿與杠桿輸入力臂的初始接觸點,點C為撥桿與杠桿輸入力臂的脫離點,點 D1為杠桿輸出力臂與頂桿的初始接觸點,頂出缽苗所需的行程為S,點 D1′為杠桿將頂桿頂出S時杠桿輸出力臂與頂桿的接觸點。α1為撥桿的角位移,初始安裝角為α10,α2為杠桿的角位移,初始安裝角為α20。杠桿所需轉角為∠D1AD1′,杠桿轉角Δα2,撥桿轉角為Δα1。所涉及長度單位均為mm,角度單位為rad。
撥桿最大極徑點的軌跡方程為:

杠桿輸入力臂最大極徑點的軌跡方程為:

杠桿輸入力臂最大極徑點與杠桿支撐軸中心 A 點連線的直線AB方程為:

各角位移及轉角,撥桿、杠桿的生成角位移和轉角由B、C點決定。令 α2=α20,求得:

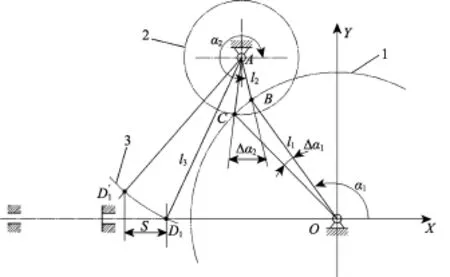
圖2 杠桿頂出式分秧機構運動簡圖Fig.2 Kinematic sketch of mechanism of push-out orderly separating seedling
2.2 漸開線反轉法設計杠桿輪廓曲線
由于頂桿運動直線水平線位移較大,且頂桿較細,因此,在滿足最小傳動角的條件下,必須使頂桿在運動過程中受到的有效推力最大,從而使機構受力良好,減小橫向分力。
為了實現偏心直動從動件最大有效受力,本文提出一種“漸開線反轉法”來設計偏心、直動從動件盤形凸輪輪廓曲線即杠桿輪廓曲線。其主要原理就是杠桿(凸輪)不動,頂桿(從動件)的中心線保持與偏心圓(以杠桿中心為中心,以偏心距為半徑所做的圓)相切并繞杠桿中心以杠桿推程轉動方向的反方向旋轉,以頂桿端部所包絡的曲線為漸開線時,杠桿對頂桿的作用力始終沿著頂桿的軸線(忽略摩擦力的影響)。而偏心圓就是漸開線的基圓,頂桿的軸線就是漸開線的發生線,發生線是漸開線的法線。因此杠桿推動頂桿工作時,相當于偏心圓(基圓)與頂桿的軸線(發生線)做純滾動,頂桿的位移等于基圓轉過的弧長(取決于偏心圓的半徑和轉過的角度)。
以杠桿中心A為原點建立如圖 3所示直角坐標系,若想完成將缽苗全部頂出,頂桿的工作行程為S(mm),頂桿與杠桿的輪廓線在初始接觸點 D1點處的坐標為(xD1,yD1),則按漸開線反轉法的原理所做的基圓以原點A為圓心,以 |yD1|(mm)為半徑r所在的圓周。
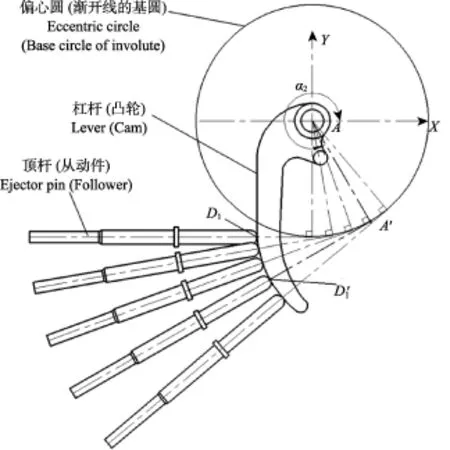
圖3 杠桿輪廓曲線解析法求解坐標系Fig.3 Coordinate of lever contour curve constructed
設頂桿與杠桿的輪廓線在任意 D1′點接觸,D1′點的坐標為(x,y),過 D1′點做基圓的切線,切點為A′,直線AA′與X軸正向的夾角α2(rad),則A′點的坐標為(rcosα2,r s in α2)。而 D1′點與A′點之間的距離 lD1′A′為:

則可求得杠桿輪廓曲線上任意1D′點的坐標方程為:

式中2α的取值范圍是:

通過Matlab編程[24-25]求出各點坐標,并直接利用其“polyfit”命令進行曲線多項式擬合,其中解析法擬合結果各取6個點的坐標值見表1。
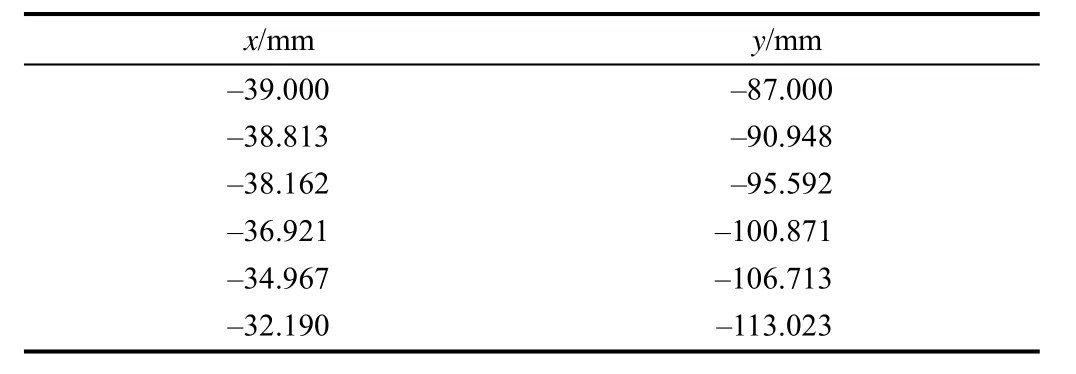
表1 解析法坐標值Table 1 Analytical normal coordinate
由于共有8個撥桿和8個杠桿,撥桿的結構和尺寸基本相同,但每個杠桿的理論曲線和尺寸都不相同,為了便于加工和降低成本,將8個杠桿設計成完全相同的。經過對每條杠桿的輪廓曲線進行分析和比對,取所有曲線的中間結果,作為杠桿的輪廓曲線。
為了將缽苗順利頂出,頂桿頂入深度必須大于缽碗的高度,即頂桿的行程要至少40 mm,而根據機構的結構首先確定已知頂桿行程S=40 mm、撥桿最大極徑l1=95 mm和頂桿的初始位置坐標 ( xD1,0)為(115 mm,0)。為了達到頂桿行程一定的情況下,控制撥桿與杠桿接觸時間最小,即撥桿轉過的角度最小,確定參數的約束條件,包括杠桿轉動中心坐標位置–90 mm≤ xA≤–60 mm,60 mm≤ yA≤90 mm;杠桿輸入力臂長度 25 mm<l2<35 mm;杠桿的初始安裝角270°<α20<320°;以及為了使杠桿受力合理,杠桿輸出與輸入力臂長度之比為 3左右等目標。最終優化得出一組參數,即杠桿轉動中心軸坐標(xA, yA)為(–80 mm, 89.5 mm),杠桿輸入力臂極徑長度l2=28 mm,杠桿的初始安裝角α20為314°,得到撥桿轉過的角度 Δα1為 7.31°。
3 虛擬樣機仿真分析
根據上述理論分析確定機構的設計參數后,對機構進行三維模型建模,并導入 ADAMS動力學虛擬軟件中進行虛擬仿真。通過對機構的運動學性能進行虛擬仿真驗證,其頂桿仿真位移與杠桿角位移變化運動規律相一致,如圖 4所示,與理論設計參數基本保持一致,從而驗證了機構運行的合理性。
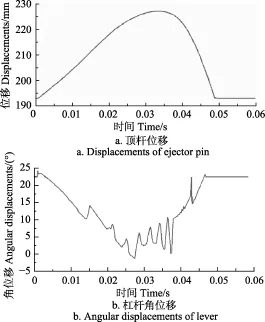
圖4 運動學分析曲線Fig.4 Kinematic analysis curve
同時為了分析機構在運轉過程中機架的受力和振動情況,擬進行機構的動力學仿真和構件在運動過程中的動力學特性仿真[26-27],圖5是杠桿作用于頂桿X、Y方向的作用力變化情況。

圖5 杠桿對頂桿的力曲線Fig.5 Force curve of lever to ejector pin
從仿真結果分析可得出:為了節約成本利于產業化生產,在將撥桿、杠桿和頂桿的結構全部統一加工的情況下,頂桿在頂出缽苗過程中的受力變化比較均勻。各受力點處X方向上的作用力均大于Y方向,且Y方向分力很小,這與頂桿做水平直線運動相符,這也充分驗證了本文基于最大有效受力的凸輪輪廓曲線所設計的杠桿正確性。在復位回程中,頂桿在X方向受力有較大突變,這是由于彈簧的快速復位產生的沖擊所造成。曲線不夠光滑有波動,這主要是因為各構件是絕對剛體,沒有彈性變形,兩處輪廓曲線相互作用下,較小的速度變化也會產生較大的加速度。
4 試驗驗證與分析
4.1 缽苗頂出翻轉試驗
玉米缽苗被頂出秧盤時的狀態基本為秧苗和土缽水平橫放位置。由于土缽和秧苗的空氣阻尼系數不同,理論上土缽和秧苗在被頂出時首先做包含旋轉的自由落體運動[28]。直到轉至土缽在下秧苗在上的基本直立狀態,轉動停止。缽苗開始做平移的自由落體運動。
試驗目的:缽苗被頂出后的運動狀態與土缽質量和秧苗大小有直接關系,因此對不同質量與秧苗高度的玉米缽苗進行試驗,探究缽苗滿足什么條件時直立下落。
試驗材料:品種為東農253的玉米缽苗,苗齡19~25 d,3葉1心到4葉一心,土缽質量分別為5、10、15、20、25 g,秧苗高度約100~180 mm,手工育苗,土壤種類為黑土(土壤密度2 650 g/mm3)。
評價指標:以轉體高度為考核指標,由于缽苗首先做包含旋轉的自由落體運動,直到轉至土缽在下秧苗在上的基本直立狀態,轉動停止,缽苗在此過程中下落的鉛垂距離稱為其轉體高度。
試驗方法:首先將含水率相同、土缽質量不同的缽苗在適合移栽且秧苗高度相同的條件下將秧苗水平橫向由底部頂出,每個土缽質量的缽苗重復試驗1盤(120棵),探究土缽質量對評價指標,即轉體高度的影響;而后,根據試驗結果選擇土缽質量相同、高度不同的缽苗,每個高度缽苗選取1盤(120棵)重復試驗,探究秧苗高度對轉體高度的影響。試驗過程利用Phantom v5.1型高速數碼攝影機對頂出后的缽苗下落過程進行正向監測,并在背景處安放測量尺作為標尺,通過 Phantom Camera Control分析軟件對缽苗轉體高度進行測量,精度為1 mm。

圖6 土缽質量對轉體高度的影響曲線Fig.6 Influence curve of soil bowl weight on rotary height

圖7 秧苗高度對轉體高度的影響曲線Fig.7 Influence curve of seedling height on rotary height
試驗結果分析:
圖6是在秧苗高度相同(均為160 mm)的條件下,5組不同土缽質量對轉體高度的影響曲線,圖中顯示數據為1組秧苗的平均試驗數值,可以看出秧苗高度相同時,土缽質量大于5 g小于15 g時,缽苗的轉體高度隨著土缽質量的增加先減小后增加,從圖中可以觀察到理想值為9~13 g,因此,最終選定土缽質量為10 g。
圖7是選定土缽質量為10 g后,秧苗高度對轉體高度的影響曲線,同樣圖中顯示數據為 1組秧苗的平均試驗數值,可以看出,缽苗的轉體高度隨著秧苗高度增加而減小。但是在試驗中可以發現,秧苗隨著苗齡的增加,土缽內的營養不足,在秧苗超過180 mm后,部分秧苗會出現葉部發黃,且長勢基本停滯。
因此,本著缽苗轉體高度較小的原則,基于上述試驗確定:當土缽質量為10 g、秧苗高度160 mm時,玉米缽苗的轉體高度適宜栽植。因此,根據土壤密度、土缽質量以及圓臺體積,即可確定秧盤設計尺寸,并可根據缽苗的轉體高度對該機構距離地面的高度進行設計。為樣機的設計提供設計依據,同時也驗證了頂出式落苗的可行性。
4.2 頂出均勻性試驗
試驗目的:由于有序分秧時,缽苗出盤后至落地的運動總時間,影響株距均勻性。塑料缽盤上每行缽苗有8棵,由于縱向送秧是連續的,同一行的缽苗并不在相同的高度上被頂出,頂出速度也不盡相同,所以缽苗頂出后落地時間的差異需要進行試驗研究。
試驗材料:選取質量為10 g、缽苗高度160 mm、含水率為18%的缽苗作為試驗對象。
評價指標:以缽苗被橫向頂出后,最終直立落地所經歷的時間間隔作為評價缽苗均勻度的指標。
試驗方法:由于缽苗含水率越高,不能被頂出的棵數越多,同時隨著撥桿轉速的增加,不能被頂出的棵數也會增加。而當缽苗盤根效果較好且在恰當的含水率時,撥桿轉速的增加,對頂出效果影響不是很大。因此為了有效的進行均勻性試驗測試,采用所設計的物理樣機,設定撥桿軸轉速約為30 r/min(每分鐘240棵苗),采用高速攝像對缽苗的落地時間間隔進行記錄,如圖9所示,測量連續12棵缽苗頂出后到達離地面相同高度的時間,重復試驗240組,對試驗結果取平均值,所得結果如表2所示。

圖8 玉米缽苗頂出試驗的高速攝像Fig.8 High speed photograph of maize pot seedling ejection test
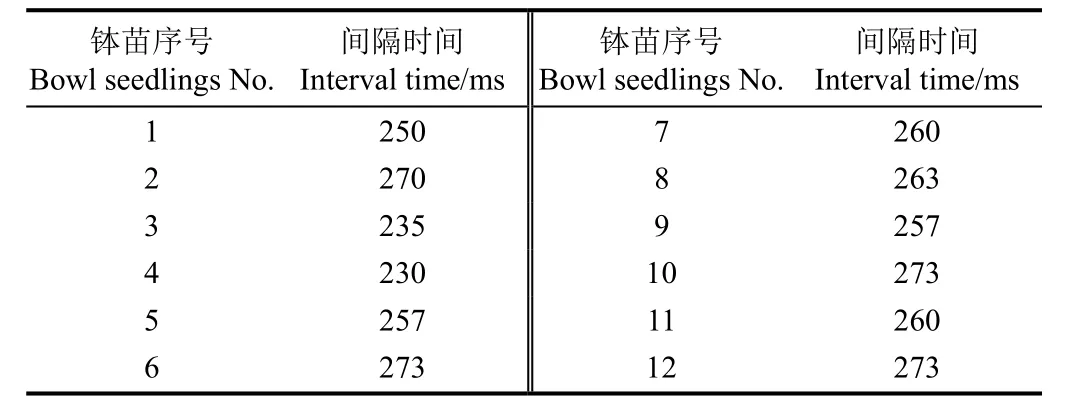
表2 缽苗頂出后的均勻性Table 2 Homogeneity of pot seedlings after ejection
從試驗的結果看,缽苗被頂出后到下降到相同高度所用的時間并不規律,其原因是多方面的,包括盡管頂桿頂出時間間隔相同,但由于每棵缽苗的個體差異,頂出速度不盡相同,且降落過程中不同的姿態也會影響缽苗的降落速度。對試驗結果計算,用實際時間間隔與其平均值求差,相對于平均值的變化即可計算出每個數據的相對誤差,通過計算,時間間隔的最大相對誤差為10.99%,平均相對誤差為4.07%,因此缽苗頂出后的時間間隔能夠滿足工作需要[29]。
4.3 田間試驗
為了驗證所設計樣機的各項性能指標,加工了整機物理樣機,并進行了田間移栽試驗,試驗方法主要參照《栽植機的性能評價指標與檢測方法》[29]。
試驗材料:選取東農253玉米品種缽苗,秧齡20 d,缽苗平均質量為10 g,秧苗平均高度為160 mm,2盤共240棵秧苗。
試驗時間及地點:2015年10月,東北農業大學農具實驗室試驗田。
試驗方法:試驗設定機具行走速度為2.5 km/h,單行作業,株距為250 mm,頂出式有序分秧機構栽植頻率為160 棵/min,進行田間試驗并記錄移栽后栽植結果。
評價指標:根據田間試驗移栽玉米缽苗的質量,以移栽成功率作為田間試驗的評價指標。移栽成功率的計算公式為:

式中 Q為移栽成功率,%;w1為移栽合格數;w為總移栽數。
試驗結果:在土壤整地良好的地塊,通過開溝器兩側回流的土壤和覆土輪對土壤二次覆土后,可將頂出的缽苗固定于苗溝,完成缽苗的移栽作業,最終共有 217個移栽合格,因此該樣機在田間作業時的性能測試結果為移栽成功率90.4%,滿足移栽要求。整機作業效率達到160棵/min,高于現有傳統旱田缽苗移栽機100棵/min以下的作業效率。埋苗率即秧苗移栽后被土壤埋沒而影響正常生長的數量占總移栽數量的百分比,埋苗率為4.2%;露苗率即移栽的秧苗缽體裸露在地表影響生長的數量與移栽總數量的百分比,露苗率為2.8%;株距變異系數即株距的標準差與平均值百分比,結果為 16%,均符合旱地栽植標準[30]。圖 9為物理樣機在田間作業的情況。相對于其他移栽形式,沒有強制夾苗機構,沒有傷苗情況發生。需要注意的是在現場試驗時開溝器入土深度對栽植質量影響很大,需要根據土壤情況及時調整。

圖9 整機作業情況Fig.9 Operation diagram of machine
5 結 論
1)本文提出的杠桿頂出式有序分秧機構,能夠在連續送秧的情況下完成有序分秧,簡化結構并提高了作業效率。
2)基于從動件最大有效受力而提出的“漸開線反轉法”設計偏心直動盤形凸輪輪廓曲線,通過解析法求得了杠桿輪廓曲線。
3)高速攝像試驗結果證明玉米缽苗分秧后是有序的,時間間隔基本一致,平均時間間隔誤差為4.07%以內,滿足均勻度要求;而田間試驗獲得了 90.4%的移栽成功率,表明所設計的參數是合理的。
[參 考 文 獻]
[1] 姚成勝,滕毅,黃琳. 中國糧食安全評價指標體系構建及實證分析[J]. 農業工程學報,2015,31(4):1-10.Yao Chengsheng, Teng Yi, Huang Lin. Evaluation index system construction and empirical analysis on food security in China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(4): 1-10.(in Chinese with English abstract)
[2] 陳淑萍,王秀瑩,李茂廷. 玉米育苗移栽技術研究[J]. 寧夏農林科技,2013,54(9):5-8.Chen Shuping, Wang Xiuying, Li Maosheng. A report on experiment in technological of seedling raising and transplanting of maize[J]. Ningxia Journal of Agriculture and Forestry Science Technology, 2013, 54(9): 5-8. (in Chinese with English abstract)
[3] 魏國江,潘冬梅,劉淑霞. 淺談黑龍江省玉米育苗移栽的優點和技術要點[J]. 黑龍江科學,2011,2(4):55-57.Wei Guojiang, Pan Dongmei, Liu Shuxia. Discussion on the advantages and the main points of the cultureseedling technique of maize in Heilongjiang[J]. Hei Longjiang Science,2011, 2(4): 55-57. (in Chinese with English abstract)
[4] 劉磊,陳永成,畢新勝,等. 吊籃式移栽機栽植器運動參數的研究[J]. 石河子大學學報(自然科學版),2008,26(4):204-506.Liu Lei, Chen Yongcheng, Bi Xinshegn, et al. Reserch on the 2ZM-2 transplanting machine with the nacelle[J]. Journal of Shihezi University(Natural Science), 2008, 26(4): 204-506.(in Chinese with English abstract)
[5] 李其昀,汪遵元. 雙輸送帶式栽植器主要結構參數的分析[J]. 農業機械學報,1997,28(4):46-49.Li Qiyun, Wang Zunyuan. Main structure parameter and analysis on planting apparatus with twin conveyer belt[J].Transactions of the Chinese Society for Agricultural Machinery,1997, 28(4): 46-49 (in Chinese with English abstract)
[6] 董 鋒,耿端陽,汪遵元. 帶式喂入缽苗栽植機研究[J]. 農業機械學報,2000,31(2):42-45.Dong Feng, Geng Duanyang, Wang Zhunyuan. Study on block seedling transplanter with belt feeding mechanism[J].Transactions of the Chinese Society for Agricultural Machinery,2000, 31(2): 42-45. (in Chinese with English abstract)
[7] 胡鴻烈,顧世康,曾愛軍. 導苗管式栽植器的設計與試驗[J]. 農業工程學報,1995,11(2):59-64.Hu Honglei, Gu Shikang, Zeng Aijun. The design and experiment on planting apparatus with seedling-guiding tube[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 1995, 11(2): 59-64. (in Chinese with English abstract)
[8] 惠東志.煙草自動移栽機取苗機構設計與試驗研究[D]. 長沙:湖南農業大學,2010.Hui Dongzhi Design and Research on the Picking Seedling Machinery of Tobacoo Autou Transplanter[D]. Changsha:Hunan agricultural university, 2010. (in Chinese with English abstract)
[9] Jin Xin, Ji Jiangtao, Huang Zizhai, et al. Seedling pick-up mechanism of five-bar combined with ordinary gear train[J].International Agricultural Engineering Journal, 2017, 26(2):151-158.
[10] Vol N. Conceptual modeling automated seedling transfer from growing trays to shipping modules[J]. Transactions of the ASAE, 1994, 37(4): 1043-1051.
[11] Choi W C, Kim D C, Ryu I H, et al. Development of a seedling pick-up device for vegetable transplanters[J]. Transactions of the ASAE, 2002, 45(1): 13-19.
[12] Xin Liang, Lv Zhijun, Wang Wenqing, et al. Optimal design and development of a double-crank potted rice seedling transplanting mechanism[J]. Transactions of the ASABE,2017, 60(1): 31-40.
[13] Jin Xin, Du Xinwu, Ji Jiangtao, et al. Automatic detection and controlling system of pot seedlings for transplanters[J].International Agricultural Engineering Journal, 2015, 24(2):143-151.
[14] 伊藤尚勝,清水修一,和田俊郎,等. 移植機的苗移植機構:中國,99118740.7[P]. 2006-03-29.
[15] Guo L S, Zhang W J. Kinematic analysis of a rice transplanting mechanism with eccentric planetary gear trains[J]. Mechanism &Machine Theory, 2001, 36(11/12): 1175-1188.
[16] Satpathy S K, Garg I K. Effect of selected parameters on the performance of a semi-automatic vegetable transplanter[J].Ama Agricultural Mechanization in Asia Africa & Latin America, 2008, 39(2): 47-51.
[17] Jin Xin, Du Xinwu, Ji Jiangtao, et al. Mechanical property experiment of plug seeding with pots gripping-picking.International Agricultural Engineering Journal[J]. 2015, 24(4):24-33.
[18] Hakli R, Lehto L, Lehto E. Method and device for planting balled seedlings: US, 22432888[P]. 1990-01-16.
[19] Choi W C, Kim D C, Ryu I H, et al. Development of a seedling pick-up device for vegetable transplanters[J]. Transactions of the Asae, 2002, 45(1): 13-19.
[20] Nakashima H, Kondo T, Kanesaki M. Seedling planting apparatus: US: 20362294: A[P]. 1995-12-26.
[21] Ye Bingliang, Yi Weiming, Yu Gaohong, et al. Optimization design and test of rice plug seedling transplanting mechanism of planetary gear train with incomplete eccentric circular gear and non-circular gears[J]. Int J Agric & Biol Eng, 2017, 10(6):43-55.
[22] 尹大慶,趙勻,陳建能. 旱田缽苗移栽機少齒差行星傳動裝置:ZL201010533184.X[P]. 2012-07-11.
[23] 趙勻,陳建能,尹大慶. 旱田缽苗移栽機杠桿頂出式丟秧機構:ZL201010533203.9[P]. 2012-07-04.
[24] 林毓峰. MATLAB從入門到精通[M]. 北京:化學工業出版社. 2011.
[25] 龔純,王正林. 精通MATLAB最優化計算[M]. 北京:電子工業出版社,2010.
[26] 鄭建榮. ADAMS—虛擬樣機技術入門與提高[M]. 北京:機械工業出版社,2004.
[27] 邢俊文. MSC.ADAMS/Flex與AutoFlex培訓教程[M]. 北京:科學出版社,2006.
[28] 趙勻. 農業機械分析與綜合[M]. 北京:機械工業出版社,2009.
[29] 封俊,顧世康,曾愛軍,等. 導苗管式栽植機的試驗研究(Ⅱ)栽植機的性能評價指標與檢測方法[J]. 農業工程學報,1998,14(2):73-77.Feng Jun, Gu Shikang, Ceng Aijun, et al. Study on transplanter with chute and seedling aid springs (part ii) judging-targets system for transplanters[J]. Transactions of the Chinese Society of Agricultural Engineering, 1998, 14(2): 73-77. (in Chinese with English abstract)
[30] JB/T 10291-2001 旱地栽植機械[S].