基于雙閉環PID模糊算法的玉米精量排種控制系統設計
2018-06-01 08:45:55陳黎卿解彬彬李兆東陳永新
農業工程學報 2018年9期
關鍵詞:作業
陳黎卿,解彬彬,李兆東,楊 路,陳永新※
(1. 安徽農業大學工學院,合肥 230036;2. 安徽省智能農機裝備工程實驗室,合肥 230036)
0 引 言
黃淮海麥玉輪作區麥秸稈采用粉碎還田作業模式,由于小麥秸稈韌性好,秸稈粉碎還田效果差,傳統地輪驅動和鏈條傳動形式易出現秸稈纏繞、擁堵等現象,播種時易發生斷條,研制一種性能可靠的主動式玉米精量排種控制系統是必要的。
當前玉米播種機多采用地輪驅動播種機和氣力式播種機[1],地輪驅動播種機由地輪傳遞動力,驅動排種軸轉動排種,當田間土壤黏重、秸稈覆蓋量較大時,造成驅動排種部分無法正常工作[2-5];氣力式玉米播種機多用于大型農場,其價格較為昂貴,暫不適用于國內。為減少漏播率和提高玉米精量播種水平,國內外學者對于機械式精密排種器和電控排種器進行一些研究:秦樂濤[6]設計了基于第五輪儀轉速采集的玉米精密播種機排種自動控制系統;龔麗農等[7]設計了一種適用于小區播種作業電控排種系統;翟建波等[8]利用傳感器技術研制了基于拖拉機前輪轉速的自動排種驅動系統;徐志成[9]采用Mamdani模糊算法對自動播種機的電控系統進行控制策略優化設計;張春嶺等[10]采用地面測速雷達實現排種電機的反饋控制。以上研究主要采用被動式傳感器檢測機具作業工況,利用常規速度反饋單閉環PID控制算法為主控制策略,存在參數整定不良、適應性差、控制穩定性差等情況;采用旋轉增量式編碼器、霍爾測速傳感器、超聲波測速傳感器及第五輪儀測速進行速度測量,由于機具作業時振動強度大、地面不平,導致數據采集不精準影響系統控制準確性,并且在人機交互方面研究較少。
針對上述問題,本文設計一種玉米電控精量排種系統,采用GPS測速傳感器采集機具田間作業速度,利用旋轉編碼器實時采集排種器作業轉速,微控制器通過轉速環、電流環結合,形成雙閉環 PID模糊算法自整定控制參數,并采用USART HMI四線制觸控串口屏設計可操控人機界面,以期實現對玉米精量排種的穩定控制,提高排種精度。
1 電控排種系統結構與工作原理
1.1 整機結構組成
玉米精量電控播種機主要覆土鎮壓輪、高度調節彈簧、種箱、肥藥口寬度調節旋鈕、種藥箱、播種機上懸掛桿、播種機前懸掛桿、播種機左右懸掛榫頭、施肥腿開溝器、排肥管、排種器開溝器、垂直式勺輪排種器、換向減速器、霍爾有感無刷直流電機等組成,結構如圖1所示,技術參數如表1所示。
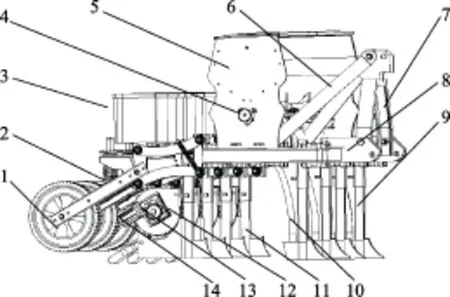
圖1 玉米精量電控免耕播種機結構簡圖Fig.1 Structure of corn precision electric control and no tillage seeder
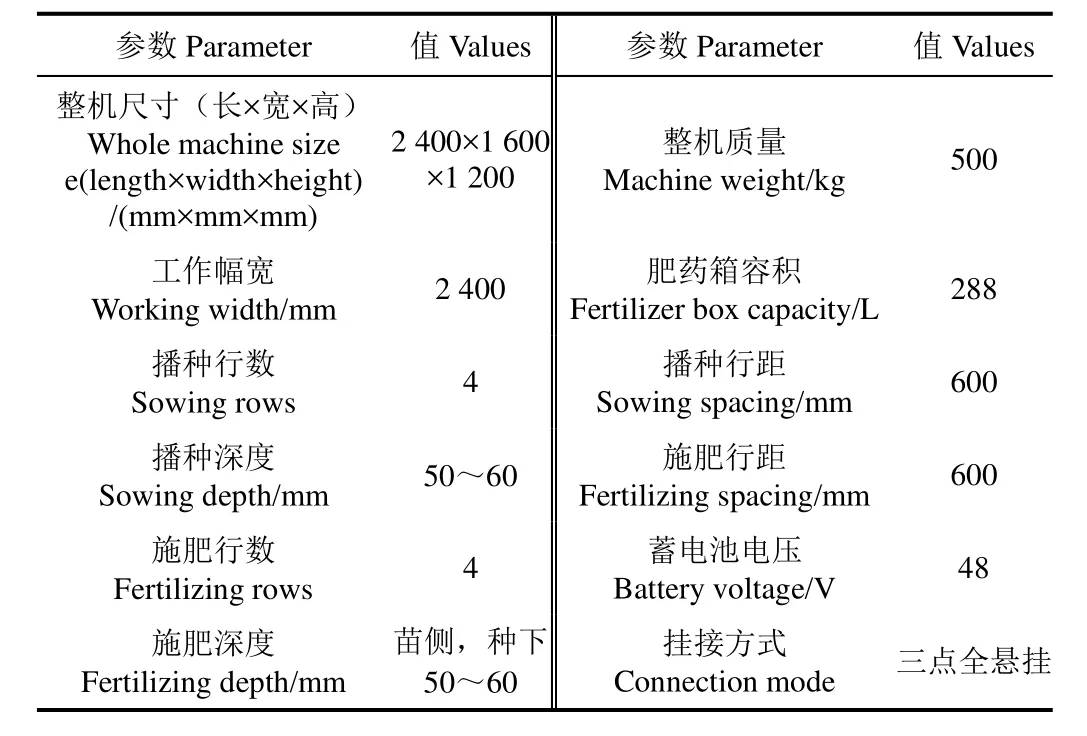
表1 玉米精量電控播種機技術參數Table 1 Technical parameter of corn precision electronic control seeder
1.2 電控排種系統結構組成及工作原理
電控排種系統主要由控制盒、觸摸顯示界面、旋轉編碼、GPS測速傳感器、無刷直流電機、驅動器、換向減速器等組成[11-12],如圖2所示。
機具工作時,電機通過增扭減速器將動力傳遞給排種軸和肥藥軸,電機通過GPS實時測速傳感器結合編碼器實現雙閉環 PID遺傳算法自整定控制參數[13-15],實時調節對應轉速來驅動排種轉軸轉動下種。電機通過人機交互界面實時控制電機的啟動與應急停止、設定排種粒距,以滿足玉米種植的農藝要求。
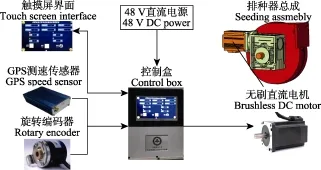
圖2 排種系統組成結構圖Fig.2 Composite and structure of seeding system
2 排種控制系統設計
玉米電控精量排種系統設計包括控制器、GPS測速傳感器、編碼器、無刷直流電機、換向減速器、USTART HMI四線制觸控串口屏等[16-19]。以 STM32F103ZET6為核心控制器,主要完成無刷直流電機實時轉速控制、USTART HMI四線制觸控串口屏、無刷直流電機的驅動和控制,以及控制算法實施等[20-21]。
2.1 控制方案
依據工作原理,玉米精量電控播種機控制系統方案采用如圖3所示的技術路線進行設計。
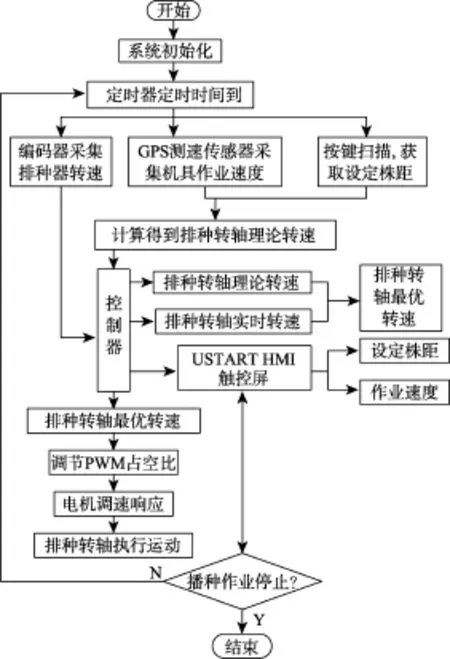
圖3 玉米精量電控播種機控制方案流程圖Fig.3 Flow chart of corn precision electronic control seeder
如圖3所示,GPS測速傳感器實時監測機具作業速度,USTART HMI四線制觸控屏控制電機待機狀態。當機組在田間作業時,通過觸控屏按下開始按鍵啟動電機運轉,電機轉速隨著機具作業速度實時變化,當機具作業速度加快,電機轉速加快;反之,則電機轉速減慢。
系統在運行通過旋轉編碼器檢測排種軸實時作業速度結合雙閉環 PID模糊算法實時自整定控制參數,以驅動排種轉軸到達最優轉速,提高控制精度,實現精量播種。
2.2 硬件設計
控制系統主要由硬件和軟件 2部分組成,其中硬件主要由電源轉換模塊、信號采集模塊、控制模塊、電機驅動模塊、人機交互模塊和排種驅動模塊。其中電源轉換模塊是利用48 V轉5 V和48 V轉12 V的金升陽大功率短路保護模塊;信號采集模塊采用的KD-100 GPS測速傳感器(0.2~120 km/h),通過衛星差分定位測速的原理來檢測機具作業速度;控制模塊主要采用STM32F103ZET6單片機對采集機具作業速度、編碼器實時轉速驅動排種模塊;排種驅動模塊包括無刷直流電機、換向減速器和固定編碼器排種轉軸[22-26]。其中控制系統電路如圖4所示。
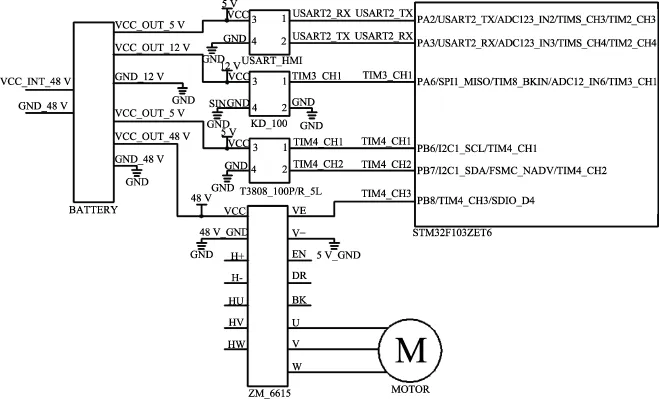
圖4 玉米精量排種控制系統電路圖Fig.4 Circuit diagram of corn precision seeding control system
2.3 控制算法
為保證作業質量和提高抗干擾能力,利用自整定遺傳模糊 PID算法對無刷直流電機采用轉速、電流雙閉環控制,電流環作為內環,轉速環作為外環,并采用PWM調制方式實現無刷直流電機調速。
2.3.1 雙閉環調速系統模型建立
雙閉環調速控制結構框圖如圖 5所示,轉速給定值與反饋值相比較,經增量式 PID調節后,輸出電流調節的給定值,與實際檢測到的電流值相比較,再經增量式PID調節,輸出PWM調制的占空比,此時當系統負載發生變化,其可有效抑制轉速波動,提高工作時抗干擾能力,保證了作業質量。
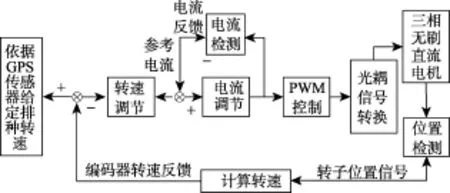
圖5 雙閉環調速控制結構Fig.5 Speed control structure of double closed loop
2.3.2 控制策略設計
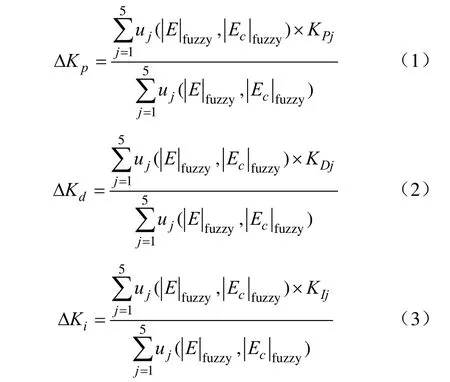
自整定模糊PID控制策略結構如圖6所示。給定轉速n與反饋轉速nf的差值e及差值的變化率ec為模糊控制器輸入量,e和ec均為精確量,將二者模糊化后得到模糊量E和Ec,由模糊控制規則進行推理和解模糊后得到修正參數ΔKp、ΔKi、ΔKd,3個修正參數根據電機運行狀態實時自動最優調整,從而實現PID控制參數自整定。
利用自整定的 PID 參數ΔKp、ΔKi、ΔKd,確定輸入e(t)和輸出u(t)之間的關系如式(8):

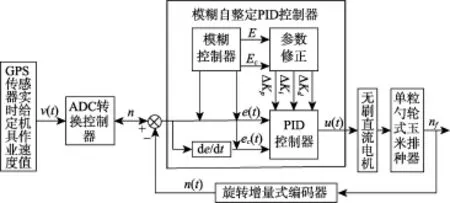
圖6 PID控制策略原理圖Fig.6 Principle block diagram of PID control strategy
控制系統輸入變量 E和 Ec,其模糊子集為{NB,NS,ZO,PS,PB},輸出變量ΔKp、ΔKi、ΔKd的模糊子集{NB,NM,NS,Z,PS,ZO,PS,PM,PB}為通過量化因子將E和Ec離散后與模糊論域對應,可得E的量化因子:

設定各變量論域為[–6,6],En 、cEn 為模糊級數,本文取輸入量化因子分別取:ΔKE=7.8,ΔKEc=1.2[27-28]。
轉速環模糊PID控制器根據不同的E和Ec,確定相適應的ΔKp、ΔKi、ΔKd,通過自整定控制器的參數達到最優轉速控制效果,輸入變量與輸出變量的控制規則如下:
1)當 E較大時,取較大的ΔKp和較小的ΔKd,同時為了防止幾分飽和,避免系統響應出現較大超調,應去掉積分作用,即ΔKi=0。
2)當E和Ec為中等大小時,ΔKp、ΔKi、ΔKd都不能太大,應取較小的ΔKp、ΔKi、ΔKd大小的值要適中,以保證系統響應速度。
3)當E較小時,為使系統具有良好的穩態性能,應增大ΔKi和ΔKp的值,同時為避免系統在設定值附近振蕩,并考慮系統的抗干擾性能,適當選取ΔKd,通常為中等大小。
3 臺架試驗
3.1 試驗材料與設備
試驗材料選用未分級的安農 102,其千粒質量為360 g,質量含水率 11%,勺輪式玉米排種器由安徽省蒙城育田機械有限公司提供。該試驗在安徽農業大學JPS-12計算機視覺排種器試驗臺進行試驗[29],如圖 7所示。
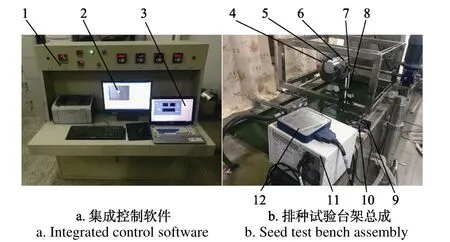
圖7 臺架試驗裝置Fig.7 Composition diagram of experimental device
3.2 試驗設計與方法
3.2.1 試驗設計
以GB-T 6973-2005 《單粒(精密)播種機試驗方法》為依據,具體進行工作轉速精度驗證、排種精度控制和排種性能試驗,以排種轉速變異系數、株距合格指數、漏播指數和重播指數評價指標,驗證本文研制的玉米精量排種控制系統的可行性以及其對排種性能的影響規律。
試驗時,需設定排種株距。黃淮海麥玉輪作區被動式地輪驅動排種株距范圍為 130~330 mm,故設定排種株距為130、160、190、220、250、280、300和330 mm共8個水平,機組前進速度為3~8 km/h(3、4、5、6、7、8 km/h)取6個水平。
3.2.2 試驗方法
1) 工作轉速精度驗證
該試驗,通過LABVIWE-NI數據采集系統采集排種軸輸出實際轉速nZ,采集時間為1 min,重復6次(nZ1~nZ6為6次重復采集試驗的平均轉速),計算出排種轉速變異系數。
2)排種精度控制驗證
采用JPS-12計算機視覺排種器試驗臺單次連續采集不同工況下250粒種子株距值,重復3次試驗,算出不同工況下的平均株距值以及變異系數,δZ為3次試驗的株距變異系數。
3)播種速度對株距影響
為探討不同播種株距條件下的最優播種速度,在不同設定播種株距條件下,重復 3次,在模擬機具作業速度為3、4、5、6、7、8 km/h下,單次試驗連續測定250粒排種株距。
4)株距合格指數、漏播指數、重播指數測定
為研究機具作業速度與設定播種株距對排種器性能的影響,采用JPS-12計算機視覺排種器試驗臺單次連續采集不同工況下250粒種子,重復3次試驗,獲得株距合格指數S(%)、漏播指數M(%)、重播指數R(%),設定播種株距下排種株距合格指數、漏播指數、重播指數,Sm、Mm、Rm為重復3次試驗平均株距合格指數,平均漏播指數;平均重播指數。株距合格指數、漏播指數、重播指數,計算公式如下:
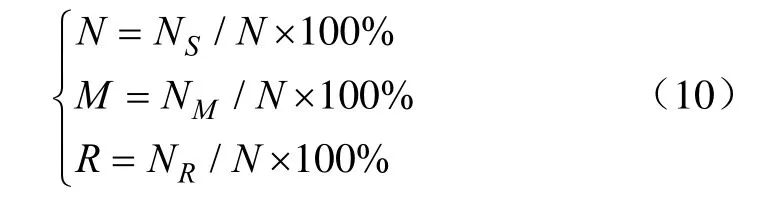
式中S為合格指數,%;M為漏播指數,%;R為重播指數,%;N為播種總株數,株;NS為播種合格株數;NM為播種漏播株數;NR為播種漏播株數。
3.3 試驗結果與分析
3.3.1 轉速控制精度試驗結果與分析
表2為轉速控制精度驗證試驗結果,由表2可知,理論排種轉速為6~54 r/min時,實際轉速的變異系數均在 10%以下,最大變異系數為 9.22%,最小變異系數為3.23%,實際轉速在理論轉速附近波動范圍小,穩定性較好,最大平均偏差為4.16%,最小平均偏差為0.27%,控制精度較好。
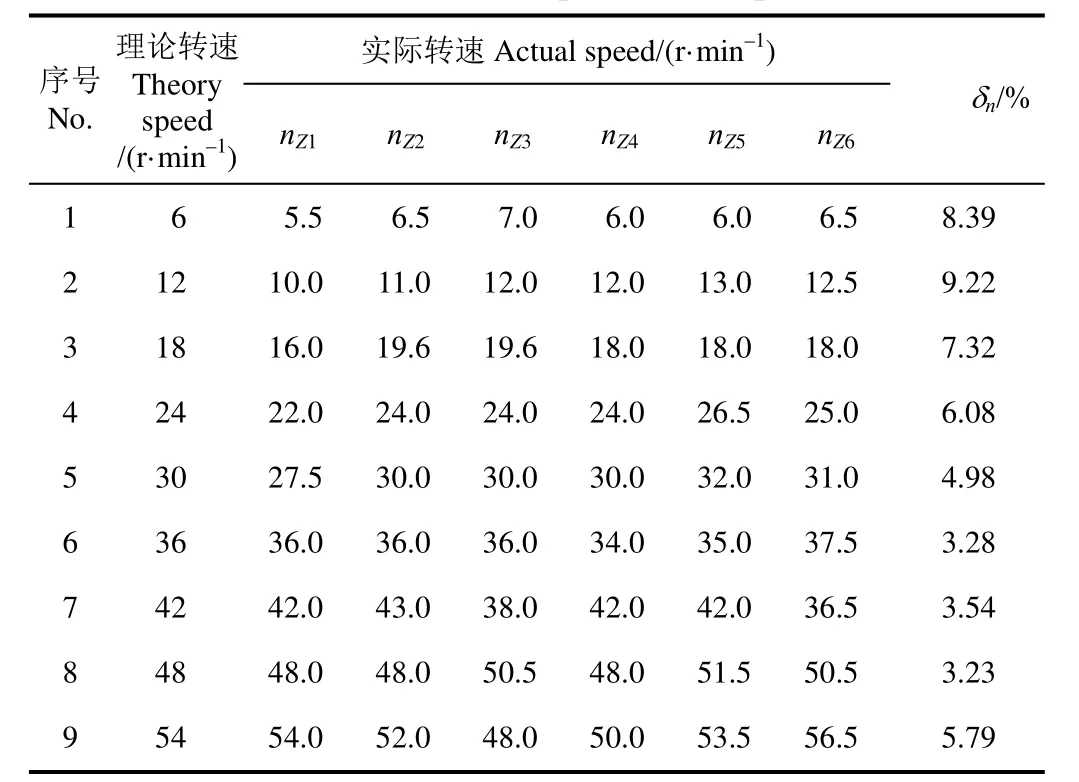
表2 轉速控制精度驗證試驗結果Table 2 Test result of speed control precision
3.3.2 排種株距與設定株距對比分析
實際排種株距值允許波動范圍為 0.5Zs<ΔZs<1.5Zs[30],表 3為設定播種株距與實際播種比較試驗結果,由表 3可知,實際播種株距均未超出允許波動范圍,變異系數在8%以下。在同一設定播種株距中,各實際播種株距與設定播種的最大變異系數為 7.32%,最小變異系數為0.75%,株距精度控制穩定。
3.3.3 播種速度對株距影響試驗結果與分析
表4為設定排種株距下的排種株距試驗結果,由表4可知,在模擬機組前進速度為3~8 km/h下,不同工況下變異系數均在 15%以下,實際排種株距均在允許范圍之內[30]。隨著機組作業速度增大,株距平均變異系數分別為10.88%、11.63%、11.88%、12.88%、14.00%和14.13%,可見排種穩定性變差;隨著設定排種株距增大,株距平均變異系數分別為12.83%、14.17%、13.83%、11.17%、12.33%、12.83%和10.33%,排種穩定性有所提高,其中330 mm株距的排種穩定性較優。因此,滿足玉米種植農業要求下,相同排種速度條件,應選取較大設定排種株距。
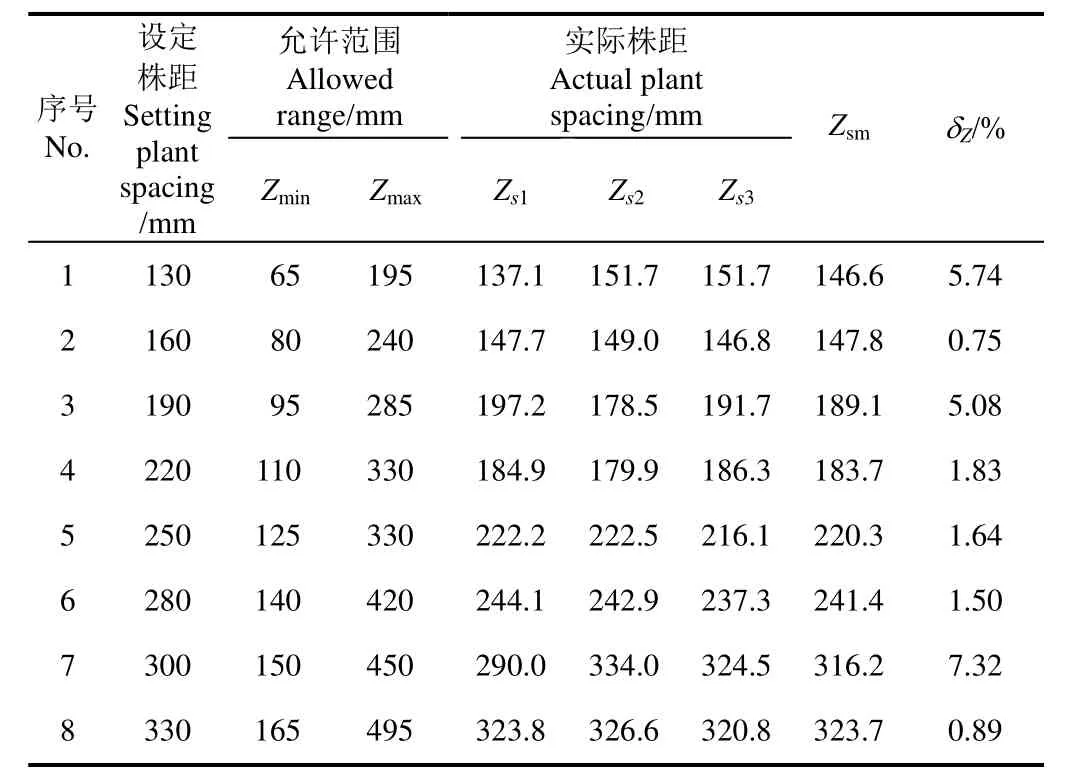
表3 設定播種株距與實際株距比較試驗結果Table 3 Comparision of setting plant spacing with actual plant spacing
3.3.4 排種性能結果與分析
由表5可知,在相同機具作業速度下,隨著設定排種株距加大,粒距合格指數均有所提高;在設定排種株距相同時,隨著車速的增加,粒距合格指數有所降低。在中低車速 3~5 km/h作業時,粒距合格指數不低于93%,中高車速6~8 km/h作業時,粒距合格指數90%左右。
當設定排種株距不變時,播種速度越高,漏播指數越來越高,而重播指數降低;在相同機組作業速度下,隨著設定排種株距加大,漏播指數均有所降低,重播指數有所升高。最大漏播指數為9.32%,不同工況下,平均漏播指數均在10%以下;最大重播指數為9.67%,不同工況下,平均重播指數均在10%以下。依據JB/T51017-1999《中耕作物精密播種機產品質量分等》,在設定株距為130~330 mm 時,播種株距變異系數≤25%[31],均滿足優等品標準。因此,可滿足實際播種作業要求。
綜上所述,由于漏播指數與重播指數之間存在一定聯系,若漏播指數高,則重播指數低,反之同理。因此,可在適當放寬重播指數的條件下,保證較低的漏播指數。在保證作業效率前提下,結合田間作業實際需求,在設定排種株距 130~300 mm 下,機具作業速度應在 4~6 km/h范圍內;在設定排種株距250~330 mm下,機具作業速度應在5~8 km/h范圍內。
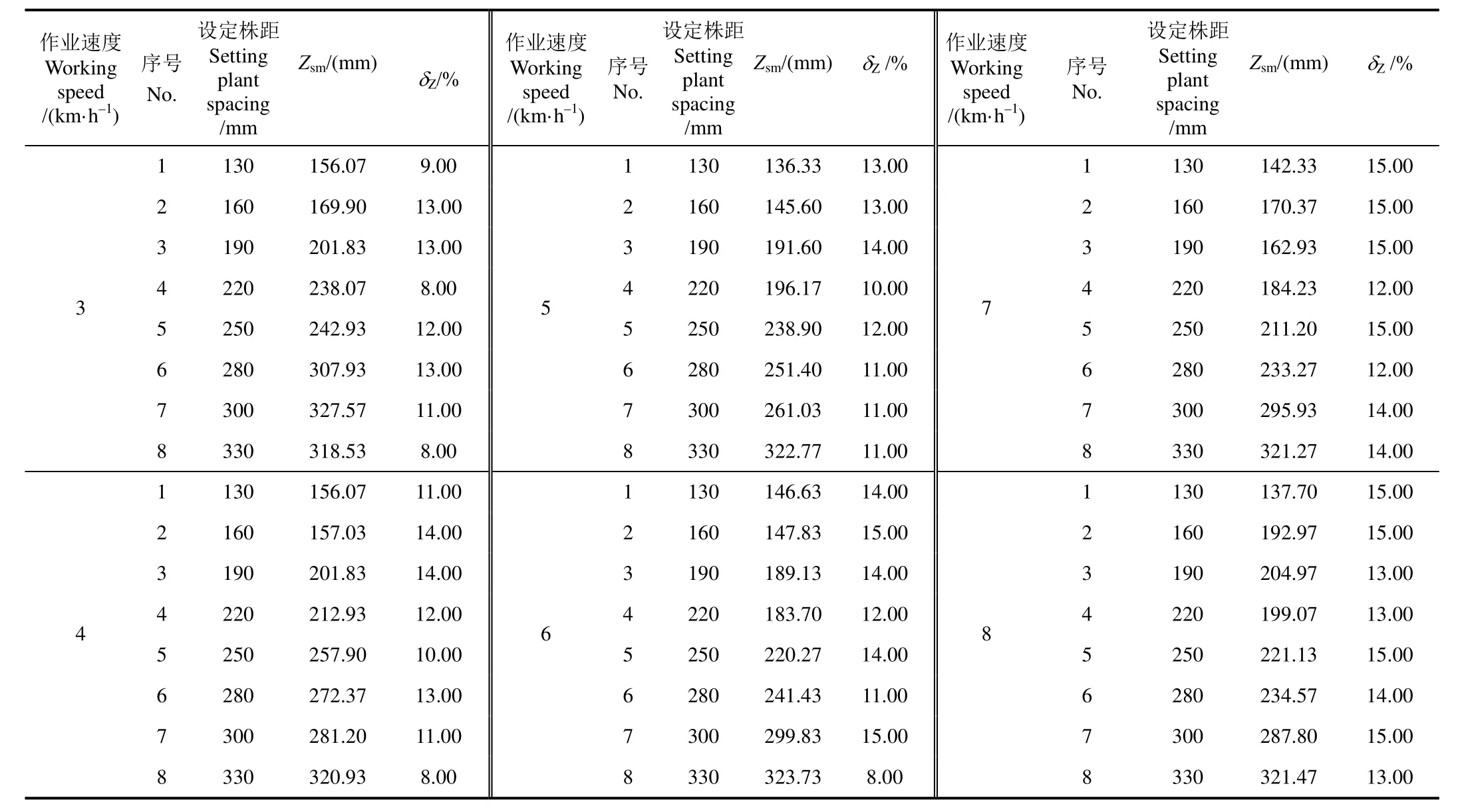
表4 設定排種株距下的排種株距試驗Table 4 Plant spacing test of setting plant spacing
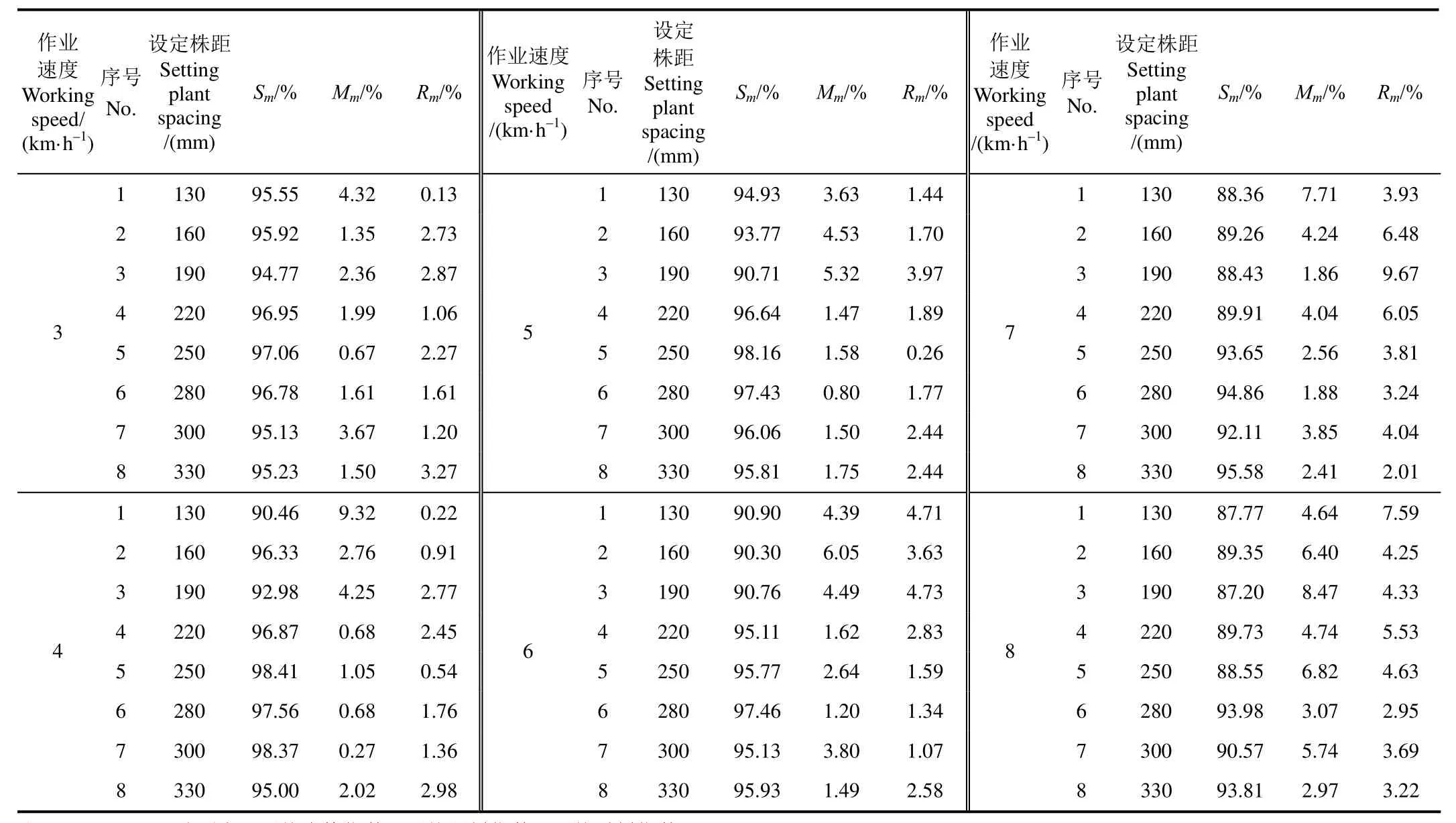
表5 設定排種株距下的排種株距合格指數Table 5 Qualification index of plant spacing for setting plant spacing
4 田間試驗
為驗證該玉米精量排種控制系統的工作穩定性,以安徽農業大學研制的 4行玉米免耕播種機為平臺,試驗材料選用未分級的安農102玉米品種,其千粒質量為360 g,質量含水率 11%。性能對比機型是市場上常見的勺輪式玉米排種器。田間播種試驗于2018年03月10日在安徽省合肥市安徽農業大學高新農業技術產業園開展,土壤類型為黏性土,如圖 8所示。田間實際作業時,牽引動力為上海紐荷蘭 SNH904拖拉機,機組前進速度為5.6 km/h,投種高度為15.6 cm,播種4行,行距為600 mm。在設定播種株距130、160、190、220、250、280、300、330 mm株距下進行田間試驗,每次試驗采集穩定作業后的80個數據,重復3次,獲得實際播種株距平均值及株距合格指數等田間試驗結果,如表 6所示。在各種株距下,研發的電控精量排種系統株距合格指數平均值為90.89%,漏播指數平均值為2.54%;在該種情況下,由于土壤黏重,導致地輪驅動無法排種,與參考文獻[10,32]關于勺輪式玉米排種器試驗數據相比合格指數提高2.12%,漏播指數降低4.32%。結合臺架與田間驗證結果表明,該玉米精量排種控制系統在田間作業工況差時,滿足玉米種植農藝要求,符合 JB/T51017-1999《中耕作物精密播種機產品質量分等》。

圖8 田間試驗Fig.8 Field experiment
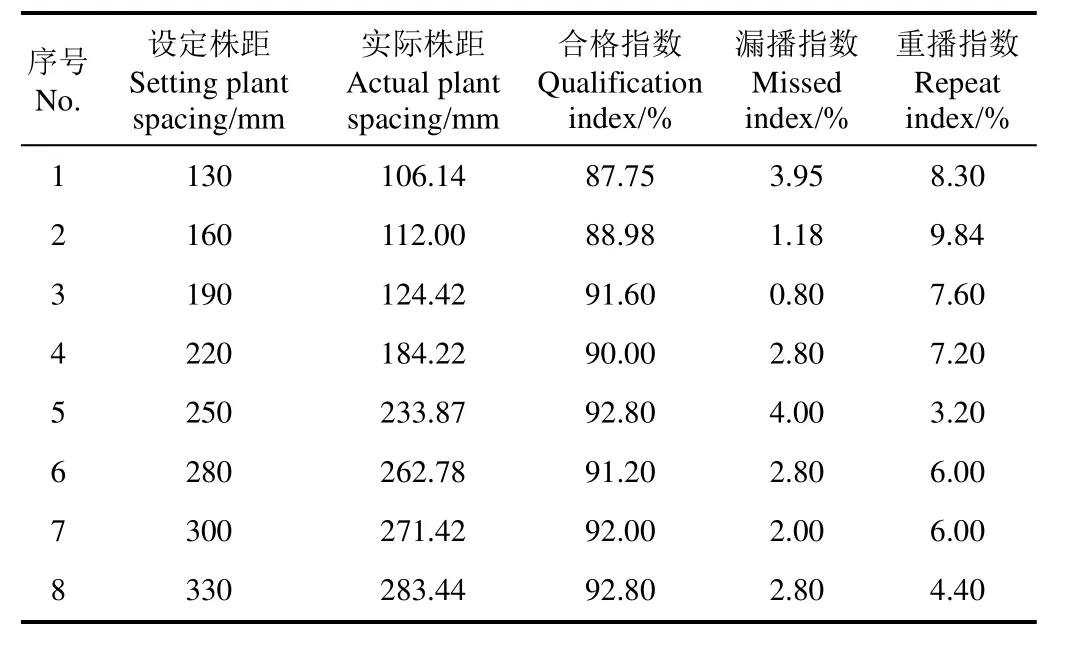
表6 田間試驗結果Table 6 Result of field test
5 結 論
1)設計了一種基于雙閉環PID模糊控制算法的玉米精量排種控制系統,工作轉速精度驗證試驗表明,在設定排種轉速范圍為6~54 r/min時,實際工作轉速的變異系數均小于 10%,通過轉速精度驗證試驗,檢驗了實際排種轉速在工作時間內的波動幅度,得出排種轉速在理論轉速附近波動范圍小,滿足控制方案需要。
2)臺架試驗表明,設定排種株距相同時,機具作業速度增大,株距合格指數越差,中低車速3~5 km/h作業時,粒距合格指數不小于93%,中高車速6~8 km/h作業時,粒距合格指數 90%左右;田間驗證試驗表明,該玉米精量排種控制系統田間播種株距合格指數不低于87%,平均值為90.89%,漏播指數均小于4%,平均值為2.54%,與市場上常見的勺輪式玉米排種器相比合格指數提高2.12%,漏播指數降低4.32%。
本研究可實現玉米主動精量排種,并在機組前進速度不大于8 km/h范圍內對排種株距實現定量控制。影響玉米主動精量排種控制的因素較多,如排種器結構型式、機組振動強度、投種高度和玉米品種等,針對上述因素及各因素間交互作用對主動排種控制性能的影響仍需進一步開展研究。
[參 考 文 獻]
[1] 楊麗,史嵩,崔濤,等. 氣吸與機械輔助附種結合式玉米精量排種器[J]. 農業機械學報,2012,43(增刊):48-53.Yang Li, Shi Song, Cui Tao, et al. Air-suction corn precision metering device with mechanical supporting plate to assist carrying seed[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(Supp): 48-53. (in Chinese with English abstract)
[2] 王慶杰,李洪文,何進,等. 凹形圓盤式玉米壟作免耕播種機的設計與試驗[J]. 農業工程學報,2011, 27(7):117-122.Wang Qingjie, Li Hongwen, He Jin, et al. Design and experiment on concave disc type maize ridge-till and no-till planter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011,27(7): 117-122. (in Chinese with English abstract)
[3] 戴飛,趙武云,唐學鵬,等. 旱地玉米全膜覆蓋雙壟溝精量播種機工作參數優化[J]. 農業機械學報, 2013,44(增刊1):39-45.Dai Fei, Zhao Wuyun, Tang Xuepeng, et al. Parameters optimization of precision seeder with corn whole plastic-film mulching on double ridges in dryland[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(Supp.1): 39-45. (in Chinese with English abstract)
[4] 張喜瑞,何進,李洪文,等. 水平撥草輪式玉米免耕播種機設計和試驗[J]. 農業機械學報, 2010,41(12):39-43.Zhang Xirui,He Jin,Li Hongwen,et al. Design and experiment on no-till planter in horizontal residue-throwing finger-wheel type for mazie[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(12): 39-43.(in Chinese with English abstract)
[5] 李復輝,杜瑞成,刁培松,等. 舵輪式玉米免耕精量施肥播種機設計與試驗[J]. 農業機械學報, 2013,44(增刊1):33-38.Li Fuhui, Du Ruicheng, Diao Peisong, et al. Design and experiment of helm-shaped no-tillage precision fertilization planter for corn[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(Supp. 1): 33-38. (in Chinese with English abstract)
[6] 秦樂濤. 玉米精密播種機排種自動控制系統研究[D]. 北京:中國農業大學,2002.Qin Letao. Study on Automatic Control Seeding System for Maize Precise Planter[D]. Beijing: China Agricultural University, 2002. (in Chinese with English abstract)
[7] 龔麗農,員玉良,尚書旗,等. 小區播種機電控系統設計與試驗[J]. 農業工程學報,2011, 27(5):122-126.Gong Linong, Yun Yuliang, Shang Shuqi, et al. Design and experiment on electronic control system for plot seeder[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(5): 122-126. (in Chinese with English abstract)
[8] 翟建波,高海洲,鄭曉龍,等. 基于傳感器技術的自動排種驅動系統研究[J]. 湖北農業科學,2011, 50(17):3619-3621,3646.Zhai Jianbo,Gao Haizhou, Zheng Xiaolong, et al. Research on automatic seed metering drive system based on sensor technology[J]. Hubei Agricultural Sciences,2011, 50(17):3619-3621, 3646. (in Chinese with English abstract)
[9] 徐志成. 自動播種機電控系統的模糊控制[J]. 農業機械化,2014, 4:12-15, 20.Xu Zhicheng. Fuzzy Control of electronic control system for automatic drill[J]. Journal of Agricultural Mechanization Research,2014, 4: 12-15, 20. (in Chinese with English abstract)
[10] 張春嶺,吳 榮,陳黎卿. 電控玉米排種系統設計與試驗[J].農業機械學報,2017,48(2):51-59.Zhang Chunling,Wu Rong,Chen Liqing. Design test of electronic control seeding system for maize[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017,48(2): 51-59. (in Chinese with English abstract)
[11] 張輝,李樹君,張小超,等. 變量施肥電液比例控制系統的設計與實現[J]. 農業工程學報, 2010,26(增刊2):218-222.Zhang Hui, Li Shujun, Zhang Xiaochao, et al. Development and performance of electro-hydraulic proportion control system of variable rate fertilizer[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2010, 26(Supp. 2): 218-222. (in Chinese with English abstract)
[12] 梁春英,衣淑娟,王熙. 變量施肥控制系統PID控制策略[J]. 農業機械學報,2010, 41(7):157-162.Liang Chunying, Yi Shujuan, Wang Xi. PID control strategy of the variable rate fertilization control system[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010,41(7): 157-162. (in Chinese with English abstract)
[13] 陳滿,魯偉,汪小旵,等. 基于模糊PID的冬小麥變量追肥優化控制系統設計與試驗[J]. 農業機械學報,2016,47(2):71-76.Chen Man, Lu Wei, Wang Xiaochan, et al. Design and experiment of optimization control system for variable fertilization in winter wheat field based on fuzzy PID[J].Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(2): 71-76. (in Chinese with English abstract)
[14] 苗中華,李闖,韓科立,等. 基于模糊PID的采棉機作業速度最優控制算法與試驗[J]. 農業機械學報,2015,46(4):9-14.Miao Zhonghua, Li Chuang, Han Keli, et al. Optimal control algorithm and experiment of working speed of cotton-picking machine based on fuzzy PID[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(4): 9-14. (in Chinese with English abstract)
[15] 梁春英,呂鵬,紀建偉,等. 基于遺傳算法的電液變量施肥控制系統PID參數優化[J]. 農業機械學報,2013,44(增刊 1):89-93.Liang Chunying, Lv Peng, Ji Jianwei, et al. Optimization of PID parameters for electro-hydraulic variable rate fertilization system based on genetic Algorithm[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(Supp.1): 89-93. (in Chinese with English abstract)
[16] 陳黎卿,陳玉,鄭媛媛,等. 微型電動施肥機的設計與試驗[J]. 機械設計,2013,30(8):79-82.Chen Liqing,Chen Yu,Zheng Yuanyuan,et al. Design and experiment on fertilizer applicator[J]. Journal of Machine Design,2013, 30(8): 79-82. (in Chinese with English abstract)
[17] Back S W, Yu S H, KimY J, et al. An image-based application rate measurement system for a granular fertilizer application[J]. Transactions of the ASABE, 2014, 57(2):679-687.
[18] Dong, Fuhong, Petzold, Olaf, Heinemann, Wolfgang, et al.Time-optimal guidance control for an agriculture robot with orientation constraints[J]. Computers and Electronics in Agriculture, 2013, 99: 124-131.
[19] Huan J, Liu X Q, Chong Q F, et al. Design of an aquaculture monitoring system based on android and gprs[J]. Applied Engineering in Agriculture, 2014, 30(4): 681-687.
[20] 郭娜,胡靜濤. 插秧機行駛速度變論域自適應模糊PID控制[J]. 農業機械學報,2013,44(12):245-251.Guo Na, Hu Jingtao. Variable universe adaptive fuzzy-PID control of traveling speed for rice transplanter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013,44(12): 245-251. (in Chinese with English abstract)
[21] 古玉雪,苑 進,劉成良. 基于模糊系統的開度轉速雙變量施肥控制序列生成方法[J]. 農業工程學報,2011,27(11):134-139.Gu Yuxue, Yuan Jin, Liu Chengliang. FIS-based method to generate bivariate control parameters regulation sequence for fertilization[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2011,27(11): 134-139. (in Chinese with English abstract)
[22] 陳滿,施印炎,汪小旵,等. 冬小麥精準追肥機專家決策系統[J]. 農業機械學報,2015,46(7):64-70.Chen Man,Shi Yinyan,Wang Xiaochan, et al. Expert decision system of variable nitrogen application in winter wheat[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(7): 64-70. (in Chinese with English abstract)
[23] 朱瑞祥,葛世強,翟長遠,等. 大籽粒作物漏播自補種裝置設計與試驗[J]. 農業工程學報,2014,30(21):1-8.Zhu Ruixiang, Ge Shiqiang, Zhai Changyuan,et al. Design and experiment of automatic reseeding device for missseeding of crops with large grain[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2014, 30(21): 1-8. (in Chinese with English abstract)
[24] Yu Xiaoyu, Chen Liqing, Wu Mengran,et al. Research on the simulation and experiment of d-bale knotter based on multi- body dynamics[J]. International Agricultural Engineering Journal, 2016, 25(1): 85-93.
[25] 孫傳祝,王法明,李學強,等. 馬鈴薯精密播種機智能控制系統設計[J]. 農業工程學報,2017,33(18):36-44.Sun Chuanzhu,Wang Faming,Li Xueqiang, et al. Design of intelligent control system of potato precision planter[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(18): 36-44.(in Chinese with English abstract)
[26] 李軍偉,崔師,李連強,等. 基于模糊PID 的無刷直流電機控制系統設計開發[J]. 機械設計與制造,2013(2):77-79.Li Junwei, Cui Shi, Li Lianqiang, et al. Design and development of brushless DC Motor control system based on fuzzy PID control[J]. Machinery Design&Manufacture,2013(2): 77-79. (in Chinese with English abstract)
[27] 中國農業機械化科學研究院. 農業機械設計手冊[M]. 北京:中國農業科學技術出版社,2007.
[28] 樂巍. 車輛半主動懸架模糊控制方法研究[D]. 鎮江:江蘇大學,2002.Yue Wei. Research on Fuzzy Control Methods for Semi-suspension of Vehicle[D].Zhenjiang:Jiangsu University,2002. (in Chinese with English abstract)
[29] 趙淑紅,周勇,劉宏俊,等. 玉米勺式排種器變速補種系統設計與試驗[J]. 農業機械學報,2016,47(12):38-44.Zhao Shuhong, Zhou Yong, Liu hewen, et al. Design of reseed shift speed system of scoop-type metering device of corn[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(12): 38-44. (in Chinese with English abstract)
[30] GB/T 6973-2005,單粒(精密)播種機試驗方法[S].
[31] JB/T51017-1999,中耕作物精密播種機產品質量分等[S].
[32] 張春嶺,陳黎卿,吳榮. 基于離散元法的勺輪式排種器性能仿真分析[J]. 安徽農業大學學報,2016,43(5):848-852.Zhang Chunling, Chen Liqing, Wu Rong. Simulation analysis for seeding performance of spoon-wheel seed metering device based on discrete element method[J]. Journal of Anhui Agricultural University, 2016, 43(5): 848-852. (in Chinese with English abstract)
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08