螺旋槳無鍵安裝液壓伺服控制系統(tǒng)設計與研究
2018-06-01 08:43:49馬晶寧范世東曹吉胤
艦船科學技術 2018年5期
關鍵詞:系統(tǒng)
馬晶寧,范世東,溫 泉,曹吉胤
(1. 武漢理工大學,湖北 武漢 430063;2. 長江航道規(guī)劃設計研究院,湖北 武漢 430011)
0 引 言
目前世界上很多大型船舶都采用液壓無鍵聯(lián)接的方式來固定槳榖與槳軸兩者的相對位置。雖然此種安裝方式應用十分廣泛,但多數(shù)船廠在安裝時仍然通過人工手動控制安裝油壓,螺旋槳無鍵安裝配套設備的自動化程度不高,這不僅使得螺旋槳的安裝質(zhì)量無法得到保證,而且安裝效率十分低下。
為解決螺旋槳安裝精度和安裝效率問題,在進行系統(tǒng)試驗研究前,按照相似理論搭建試驗模型,對實船的計算數(shù)據(jù)進行相似換算,在計算出試驗模型的主要參數(shù)的基礎上,對控制系統(tǒng)結構單元中的一些參數(shù)進行預估,確定了控制系統(tǒng)的設計原則[1]。與此同時,對系統(tǒng)進行驗證分析,結果表明此系統(tǒng)的穩(wěn)定性好,控制精度高,線性輸出好,滿足設計要求。通過實驗驗證了控制系統(tǒng)方案可以滿足螺旋槳無鍵安裝的要求。
1 控制系統(tǒng)建模
螺旋槳無鍵安裝液壓伺服控制控制系統(tǒng)組成見圖1,系統(tǒng)主要由放大器、電液伺服閥、泵組、液壓缸、壓力傳感器以及位移傳感器形成一個閉環(huán)控制系統(tǒng)。

圖 1 控制系統(tǒng)組成Fig. 1 Control system composition
系統(tǒng)中油液流量滿足連續(xù)性要求;忽略系統(tǒng)中各單向閥、溢流閥、安全閥、回油泵等的影響;忽略與液壓缸活塞運行速度有關的粘性摩擦力的影響[2]。
1.1 數(shù)學模型
1.1.1 電液伺服閥
電液伺服閥的動態(tài)特性與供油壓力、輸入信號幅值、油溫、環(huán)境溫度、負載條件等許多因素有關。一般情況下,電液伺服閥的傳遞函數(shù)通常用振蕩環(huán)節(jié)來表示:
式中:Ksv為電液伺服閥增益;wv為電液伺服閥固有頻率;ξv為電液伺服閥阻尼比。經(jīng)過前期計算得知,本系統(tǒng)需要匹配螺旋槳安裝到預定位置的電液伺服閥固有頻率比系統(tǒng)的固有頻率要高出很多,亦可將電液伺服閥傳遞函數(shù)近似為比例環(huán)節(jié):
1.1.2 變量機構
經(jīng)前期計算可知,將螺旋槳安裝到預定位置,需要55 MPa的液壓推力,變量機構的實質(zhì)相當于一個閥控液壓缸,在不受外力干擾的情況下,其傳遞函數(shù)為:

式中:Aa閥控變量機構活塞有效面積;ws為閥控變量機構固有頻率;ξs為閥控變量機構阻尼比。計算后得知,變量機構的液壓缸固有頻率比較高,可將變量機構的傳遞函數(shù)簡化成一個積分環(huán)節(jié):
1.1.3 變量泵
軸向柱塞變量泵的排量為DP=aKp,變量泵的傳遞函數(shù)為Wp=npKp。式中np為變量泵的轉速;Kp為變量泵排量梯度。
1.1.4 內(nèi)環(huán)控制系統(tǒng)
內(nèi)環(huán)控制系統(tǒng)由比例放大器、電液伺服閥、變量機構、變量泵和壓力傳感器組成一個負反饋系統(tǒng),在此系統(tǒng)中,設置壓力傳感器的增益為Kpf,令

可得內(nèi)環(huán)控制系統(tǒng)傳遞函數(shù)為:
由內(nèi)環(huán)控制系統(tǒng)傳遞函數(shù)可以看出,其為慣性環(huán)節(jié),其中Ksvp為內(nèi)環(huán)控制系統(tǒng)的增益,Tp為時間常數(shù)。
1.1.5 液壓缸
液壓缸是本系統(tǒng)中將液壓能轉換為機械能的執(zhí)行元件,液壓缸的傳遞函數(shù)為:
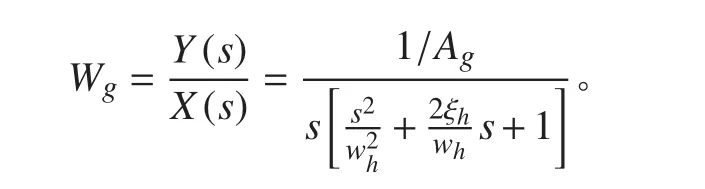
式中:Ag為液壓缸活塞面積;wh為液壓缸的固有頻率,V為液壓缸的等效體積;βe為液壓油的體積彈性參數(shù);m為負載質(zhì)量;ξh為液壓缸阻尼比,C為負載的黏性阻尼系數(shù);Kt為液壓缸彈性系數(shù)。
在控制系統(tǒng)中,液壓缸的固有頻率和阻尼比對穩(wěn)定性起到?jīng)Q定性的作用,由于液壓缸的固有頻率往往最低,而其他環(huán)節(jié)大部分可視為比例環(huán)節(jié),所以開環(huán)系統(tǒng)的增益將受到液壓缸固有頻率的較大影響。
綜合以上分析可得控制系統(tǒng)的傳遞函數(shù)方框原理如圖2所示。
系統(tǒng)的開環(huán)傳遞函數(shù)為:

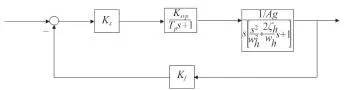
圖 2 未校正的系統(tǒng)方框原理圖Fig. 2 Control system composition
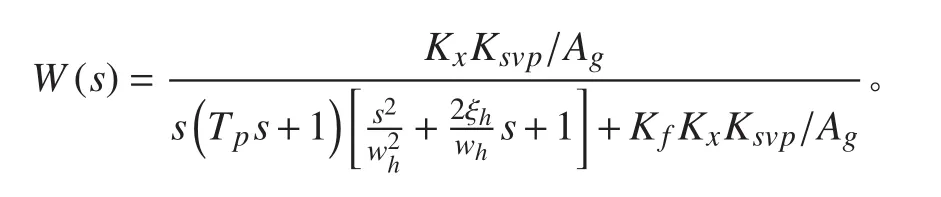
系統(tǒng)的閉環(huán)傳遞函數(shù)為:
1.2 參數(shù)選擇
將螺旋槳推送到預定位置是螺旋槳液壓伺服系統(tǒng)的主要任務。系統(tǒng)采用了高精度的位置傳感器,可以使螺旋槳液壓伺服系統(tǒng)達到控制性能好和控制精度高的目的,由于每個機構驅(qū)動負載大小不同,所以選用的伺服閥和液壓缸也要求有較高的適應能力[3]。基于以上要求,經(jīng)計算后,控制系統(tǒng)主要參數(shù)如表1所示。

表 1 系統(tǒng)參數(shù)Tab. 1 System parameters
2 控制系統(tǒng)仿真與分析
2.1 勞斯判據(jù)
判斷一個系統(tǒng)是否穩(wěn)定,可以通過勞斯判據(jù)進行判斷。在閉環(huán)傳遞函數(shù)中,其分母1+G(s)H(s)=0就是系統(tǒng)的特征方程。將特征方程寫成s的多項式,即要使上式中沒有正實部的根,其必要條件是所有系數(shù)都大于0[4]。在本系統(tǒng)中,特征方程還需將特征方程的系數(shù)排成2行,第1行由1,3,5項系數(shù)組成,第2行由2,4,6項系數(shù)組成,根據(jù)勞斯陣列的計算方法逐行進行計算,直到計算到s0行為止。
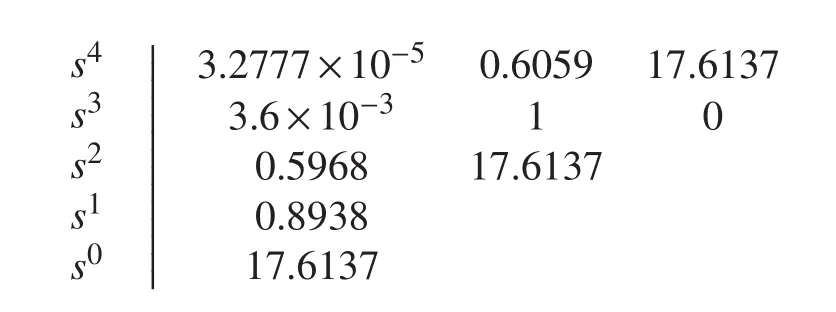
通過勞斯陣列可以看出:系統(tǒng)的特征方程的各項系數(shù)全部為正值,與此同時陣列的第1列全為正,說明該系統(tǒng)穩(wěn)定。
2.2 頻域分析
在工程上,頻域分析是廣為采用的綜合分析系統(tǒng)的方法。可以看出,螺旋槳液壓伺服控制系統(tǒng)是一個4階控制系統(tǒng),較為復雜,如果系統(tǒng)中元件有增減,或元件參數(shù)有變化,將會對整個系統(tǒng)的頻率特性產(chǎn)生影響,為了清楚表示出這些影響,系統(tǒng)將采用對數(shù)頻率特性圖(Bode圖)進行穩(wěn)定性分析[5]。在Matlab中,輸入系統(tǒng)的傳遞函數(shù),即可得出Bode圖如圖3所示。
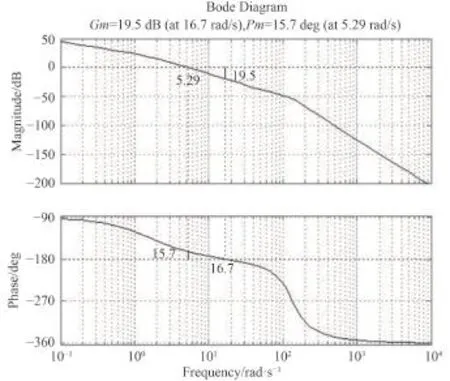
圖 3 原系統(tǒng)Bode圖Fig. 3 Bode diagram of the original system
通過勞斯判據(jù)來判斷系統(tǒng)的穩(wěn)定性固然重要,但它不是唯一能刻畫系統(tǒng)性能的準則,因為有的系統(tǒng)即使穩(wěn)定,但其動態(tài)性能表現(xiàn)出很強的振蕩。在系統(tǒng)Bode圖中,可求出系統(tǒng)頻率特性的性能指標,使系統(tǒng)有一定的穩(wěn)定裕度。在開環(huán)系統(tǒng)Bode中,系統(tǒng)的幅值裕度為19.5 dB,相位裕度為15.7°,幅值穿越頻率為16.7 rad/s,相角穿越頻率為5.29 rad/s,由于幅值裕度和相位裕度均為正值,具有相對的穩(wěn)定裕度,因此系統(tǒng)穩(wěn)定。
在建立系統(tǒng)的傳遞函數(shù)時,忽略了其中的一些次要因素,由于系統(tǒng)的幅值裕度和相位裕度較小,系統(tǒng)運轉之后會發(fā)現(xiàn)與實際運行的系統(tǒng)之間會有誤差。為了獲得滿意的系統(tǒng)性能,應使幅值裕度大于20 dB,可以適當提高相位裕量,一般要大于45°為宜,使允許的最大偏差增大,即使開環(huán)增益和元件的時間常數(shù)在一定的范圍內(nèi)變化,也能保證系統(tǒng)的穩(wěn)定性,這可以通過減小增益K達到。但是減小K值會造成系統(tǒng)的誤差增大,不建議采用此種方法。因此,可以通過增加校正環(huán)節(jié)來改變系統(tǒng)的頻率特性和性能指標。
2.3 誤差分析
作為一個電液位置伺服系統(tǒng),本系統(tǒng)靜態(tài)誤差主要由下述因素引起:液壓動力機構中的死區(qū)、電液伺服閥和放大器的零飄、位置傳感器的零位誤差。本I型系統(tǒng)在單位斜坡信號輸入下,系統(tǒng)穩(wěn)態(tài)誤差為開環(huán)增益的倒數(shù)。
3 頻域法滯后-超前校正
螺旋槳液壓伺服系統(tǒng)加載壓力高,工況復雜,需要對校正后系統(tǒng)的動態(tài)和靜態(tài)性能有更多更高的要求,滯后-超前校正適用于本系統(tǒng)的校正。施加滯后-超前校正環(huán)節(jié),主要是利用其超前部分增大系統(tǒng)的相位裕度,以改善系統(tǒng)的動態(tài)性能;利用其滯后部分改善系統(tǒng)的靜態(tài)性能[6]。
3.1 校正器設計
要求系統(tǒng)的靜態(tài)速度誤差系數(shù)Kv=17.613 7s–1,由于系統(tǒng)的傳遞函數(shù)W0(s)為I型系統(tǒng),所以其靜態(tài)速度誤差系數(shù)Kv就等于系統(tǒng)的開環(huán)增益K,校正后的系統(tǒng)相位裕度Pm>45°,增益裕度能夠達到Gm≥20 dB。
滯后校正部分的傳遞函數(shù)為:
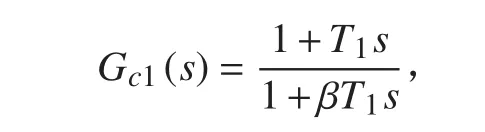
工程上,一般選(ωc1為校正前系統(tǒng)的幅值穿越頻率),β=8~10,本系統(tǒng)選擇8。
超前校正部分的傳遞函數(shù)為:
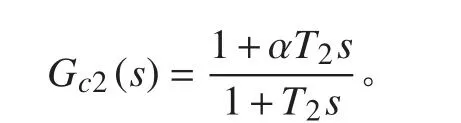
式中:L(ωc2)為系統(tǒng)串聯(lián)滯后校正器之后的幅值;ωc2為經(jīng)過滯后校正的期望幅值穿越,本校正系統(tǒng)經(jīng)計算可求出

將滯后超前校正傳遞函數(shù)串聯(lián)到原系統(tǒng)中,可得到校正后的系統(tǒng)各項性能參數(shù)如圖4所示。
3.2 校正后系統(tǒng)頻域特性
根據(jù)校正后的系統(tǒng)開環(huán)Bode圖(見圖5),可得出系統(tǒng)的幅值裕度為24.5 dB,相位裕度為79.2°,幅值穿越頻率為83.9 rad/s,幅值穿越頻率為6.3 rad/s,校正后的系統(tǒng)幅值裕度相比較校正前的系統(tǒng)提高了5 dB,系統(tǒng)的幅值裕度大于20 dB,相位裕度大于45°,達到了校正的要求,系統(tǒng)的穩(wěn)態(tài)以及抗干擾性能進一步提高,達到了設計要求。

圖 4 校正后的系統(tǒng)方框原理圖Fig. 4 Schematic diagram of the system box after correction
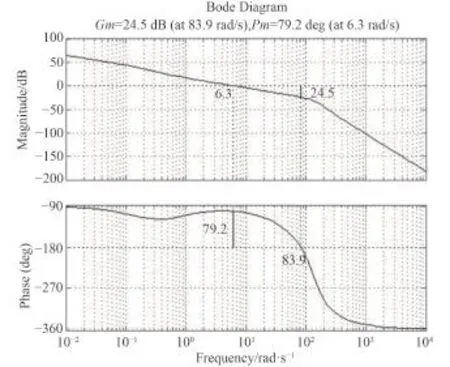
圖 5 校正后系統(tǒng)開環(huán)Bode圖Fig. 5 Bode diagram of system open loop after correction
3.3 瞬態(tài)響應分析
對校正后的控制系統(tǒng)進行時域分析,在Matlab/Simulink環(huán)境下建立螺旋槳無鍵液壓伺服控制系統(tǒng)模型[7]。對線性系統(tǒng)而言,輸入的變化并不會影響到動態(tài)響應的時間。因此,以單位階躍響應作為模擬位移信號輸入,仿真時長為10 s,得到如圖6所示的響應曲線。
從圖中可以看出,系統(tǒng)的最大超調(diào)量由64.5%下降到4.21%,幾乎達到?jīng)]有超調(diào),調(diào)整時間由原來的4.85 s下降到2.18 s,上升時間與原系統(tǒng)相同,幾乎同為0.262 s,系統(tǒng)的瞬態(tài)響應情況大幅提升。
4 螺旋槳無鍵安裝控制方案及其驗證
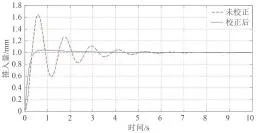
圖 6 階躍響應對比圖Fig. 6 Step response contrast diagram
在無鍵螺旋槳液壓安裝前,根據(jù)文獻[8]中相關公式對液壓安裝的油壓和推入量進行理論計算,獲得液壓安裝過程中的軸向油壓和徑向油壓與推入量之間的關系曲線。如圖7所示,首先系統(tǒng)開始運行,對AD/DA模塊進行初始化,然后電機啟動,在操作界面上輸入設定軸向/徑向壓力值和推入量位移值,將計算獲得的p-s曲線輸入安裝控制系統(tǒng),實際安裝時的油壓隨推入量的數(shù)值按照給定p-s曲線進行加載;然后系統(tǒng)會先判斷推入量是否達到限定值,若達到則安裝運行結束,若沒有達到就會接著判斷軸向/徑向壓力是否達到設定值,若沒有達到則由電液伺服閥進行自動調(diào)節(jié),若達到則安裝運行結束[9-10]。與此同時,當發(fā)現(xiàn)位移傳感器反饋值超出設定值時,為防止螺旋槳轂和螺旋槳軸等部件被破壞,需停止無鍵螺旋槳的液壓安裝,并分析故障原因。
系統(tǒng)的控制目的是為了實現(xiàn)螺旋槳的無鍵安裝自動化過程,并且保證其安裝質(zhì)量和安裝效率[12]。在理論計算中得出當位移量為本實驗臺最佳推入量2.53 mm時,軸向壓力為55 MPa,啟動系統(tǒng)進行安裝過程測試并記錄其安裝曲線,如圖8所示。
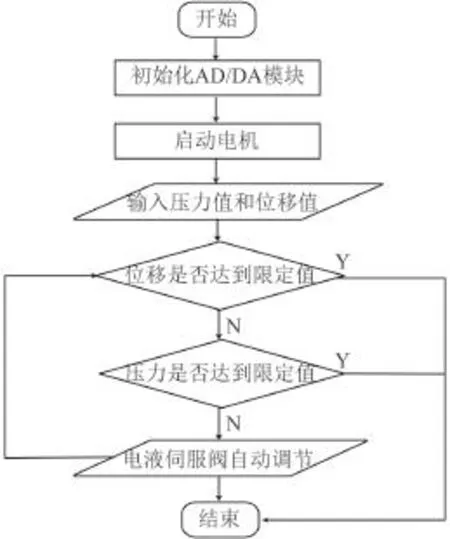
圖 7 控制系統(tǒng)流程圖Fig. 7 Flow chart of control system
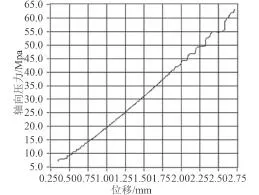
圖 8 螺旋槳無鍵安裝過程曲線圖Fig. 8 Curve diagram of keyless installation of propeller
由圖可見,安裝曲線呈線性分布向上,曲線平滑,基本符合完美安裝,在軸向壓力為55 MPa的情況下,精準的推入位移到了2.5 mm左右,與理論推入位移值2.53 mm的誤差在正常范圍,所以采用以上的控制系統(tǒng)和控制策略在本實驗中可以達到安裝要求。
5 結 語
1)對螺旋槳無鍵安裝液壓伺服控制系統(tǒng)的主要環(huán)節(jié)建立了數(shù)學模型,并利用Matlab軟件對其進行仿真分析,得到了系統(tǒng)對數(shù)頻率特性各性能指標,由于相位裕量較小,同時,系統(tǒng)存在振蕩和超調(diào)的情況,因此需要對系統(tǒng)進行校正。
2)采用滯后—超前校正方法對系統(tǒng)進行校正,校正后的系統(tǒng)頻率特性指標為:幅值裕度為24.5 dB,相位裕度為79.2°,相角穿越頻率為6.3 rad/s,幅值穿越頻率為83.9 rad/s,達到了校正的目的和要求。
3)校正后與校正前相比,通過瞬態(tài)響應分析可得出,系統(tǒng)的最大超調(diào)量由64.5%下降到4.21%,幾乎達到?jīng)]有超調(diào);調(diào)整時間由原來的4.85 s下降到2.18 s;上升時間幾乎同為為0.262 s,系統(tǒng)的瞬態(tài)響應情況大幅提升,說明校正環(huán)節(jié)必要。
4)提出一種螺旋槳自動安裝的方案,通過閉環(huán)控制的方式,在軸向壓力為55 MPa的情況下,精準的推入位移到了2.5 mm,保證了安裝精度。
[1] 但家梭. 無鍵螺旋槳液壓安裝過程測控系統(tǒng)的研發(fā)[D]. 武漢: 武漢理工大學, 2012.
[2] 余武斌, 李德遠, 黃亞農(nóng), 等. 潛艇舵機液壓伺服控制系統(tǒng)數(shù)學模型分析[J]. 船舶工程, 2002(4): 38–42.
[3] 何兵. 基于Matlab/Simulink的液壓位置伺服系統(tǒng)仿真[J]. 瀘州職業(yè)技術學院學報, 2012(1): 25–28.
[4] 機械設計手冊(液壓傳動與控制)[M]. 北京: 機械工業(yè)出版社, 2007.
[5] 趙廣元. Matlab與控制系統(tǒng)仿真實踐[M]. 北京: 北京航空航天大學出版社, 2009.
[6] 張文, 陳建萍, 袁新娣, 等. 應用MATLAB實現(xiàn)自動控制系統(tǒng)的頻域法校正[J]. 廣東技術師范學院學報(自然科學),2014(3): 12–14.
[7] ROSS B. Protecting cirtical control system[J]. Network Security, 2012(3): 7–11.
[8] 中國船級社. 鋼質(zhì)海船入級規(guī)范(第 3 分冊)[S]. 北京: 人民交通出版社, 2012.
[9] 胡旭晟, 范世東, 朱漢華. 無鍵螺旋槳液壓安裝方案分析[J].船舶工程, 2015(7): 30–33.
[10] 楊征瑞. 電液比例與伺服控制[M]. 北京: 冶金工業(yè)出版社,2009.
[11] KIAM H A, CHONG G, YUN Li. PID control system analysis,design and technology[J]. IEEE Transaction on Control system Technology, 2005. 13(4): 559–576.
[12] 宋錦春, 陳建文. 液壓伺服與比例控制[M]. 北京: 高等教育出版社, 2013.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
