模糊PID智能灌溉控制器的設計及MATLAB仿真
2018-05-30 02:04:36於沈剛馬明舟岳雪峰王運圣
節水灌溉 2018年5期
於沈剛,馬明舟,岳雪峰,萬 衡,王運圣
(1.上海應用技術大學,上海200235;2.大連理工大學城市學院,大連116600;3.上海市農業科學院農業科技信息研究所,上海201403;4.上海數字農業工程技術研究中心,上海 201403)
0 引 言
20世紀90年代以來我國節水農業發展進入了新的時期,如今的節水灌溉技術已發展成節水灌溉工程技術和節水灌溉農業技術為主并相互結合的技術體系[2]。由于人工智能技術的發展,一些控制理論如專家系統、模糊邏輯控制、神經網絡控制、協同控制等被廣泛地應用到工程問題的預測和建模。這些理論基于自動化傳感器設備,監測土壤水分, 利用氣象數據,估算植物蒸騰量,然后經過控制理論的分析和處理,進行邏輯判斷,進一步將信號送到執行機構,控制一些電磁閥的關閉,更好、更及時、更準確地預測環境參數,及時調整輸出響應以適應作物不同生長時期對水分的需求。
溫室是隨著農村經濟結構和作物種植結構調整發展起來的新型設施農業,相對于大田農業而言,其具有占地面積小,種植靈活,易于控制作物生長環境等優點。為了解決我國北方冬天蔬菜供應短缺問題,北方開始大規模推廣和發展溫室農業[3]。溫室是一個復雜的大慣性、純延時和非線性系統,難以對其建立精確的數學模型,傳統的控制方法在實時性和控制精度上已不能滿足其控制要求[4]。模糊控制是一種非線性的控制方式,不需要建立對象的精確數學模型,根據領域專家知識或操作人員經驗就可制定針對對象有效的控制策略,響應速度快,但控制誤差較大[5],PID控制器對于時變系統具有很好的魯棒性,適應性強。基于以上2種控制方法優點,針對溫室灌溉系統具有非線性、嚴重滯后的特性[6],本論文提出了一種PID控制和模糊控制相結合的模糊PID控制方法,并利用MATLAB搭建仿真模型證實其可行性。
1 溫室灌溉控制系統結構設計
通常溫室內的水分環境包括空氣濕度和土壤濕度2個方面,而對植物的生長發育起到關鍵作用的是土壤濕度。本文設計的控制器通過對土壤濕度變化的控制,使得土壤濕度一直穩定在植物最佳土壤濕度值附近,從而實現對植物實時、適量的灌溉。
系統采用的是兩輸入三輸出的二維模糊控制策略,通過模糊控制調節PID控制器的3個修正參數,提高系統的動態響應速度,增強系統對于外界條件變化的適應性,同時PID控制器能夠有效地降低穩態誤差,提高精度。模糊控制器的輸入量為傳感器測得的土壤濕度值y測與設定的最佳土壤濕度值y目的偏差E和偏差的變化率EC,輸出量為PID控制器的3個輸入修正參數ΔKp、ΔKi、ΔKd。系統的結構框圖見圖1。

圖1 控制系統結構框圖
圖1中誤差E值由式E=y目-y測得到,其中y目為系統設定的土壤濕度最佳值;y測為測得土壤濕度實時值。誤差的變化率由EC=E(k)-E(k-1)得到,E(k)為k時刻的土壤濕度值;E(k-1)為k-1時刻的土壤濕度值。將E與EC作為模糊控制器的2個輸入,通過設定變量因子進行模糊化處理,制定模糊控制規則表,進行模糊決策,輸出為PID控制器輸入的3個修正參數ΔKp、ΔKi、ΔKd,通過比例因子進行解模糊化處理并作用于PID控制器輸出 值,最后作用于控制對象輸出灌溉水量,完成作物灌溉。
2 模糊PID控制器的設計
2.1 模糊PID控制器組成
模糊PID控制器主要由模糊控制器和參數可調節PID控制器2部分組成,模糊控制器完成對參數可調節PID控制器3個參數的整定,參數可調節控制器的輸出完成對系統的控制[7]。PID控制器由比例環節(Proportional)、積分環節(Integral)和微分環節(Differential)組成,連續PID控制器的一般形式為[8]:

(1)
式中:Kp為比例系數;Ki為積分系數;Kd為微分系數;u(t)為系統t時刻的控制作用;E(t)為誤差,EC(t)為誤差的變化率,這2個變量同時作為模糊控制器的2個輸入。
2.2 模糊PID控制規則制定
實驗對象是甜瓜,考慮節水灌溉的實際條件和控制精度,定義偏差E的基本論域是[-5%,5%],偏差變化率EC的變化范圍是[-3%,3%],甜瓜的整個生長期內的最佳土壤濕度范圍為[13%,23%][9];根據滴灌實驗可測的在深度20 cm處的土壤濕度從13%升高到23%用時約30 min,則設定輸出變量U的基本論域為[0,30]。模糊子集的數量決定了對所研究對象的模糊論域的分割程度,模糊子集太少分割太粗,影響系統控制精確度;模糊子集太多,則模糊規則制定較多,系統控制較復雜,但控制精確度明顯提高。基于模糊子集制定規則以及控制系統的實際控制要求,定義E和EC的模糊語言值各有7個:{負大,負中,負小,零,正小,正中,正大},簡記為{NB,NM,NS,Z,PS,PM,PB},其對應的模糊子集的論域為{-3,-2,-1,0,1,2,3}。輸出變量u包括PID控制器的3個修正參數ΔKp、ΔKi、ΔKd,定義3個修正參數的模糊子集為{負大,負中,負小,零,正小,正中,正大},簡記為{NB,NM,NS,Z,PS,PM,PB},其對應的模糊子集論域為{-10,-6.67,-3.33,0,3.33,6.67,10},考慮實際溫室灌溉系統還沒有措施可以快速有效降低土壤濕度,模糊PID控制器輸出U的上限為4,下限為0,避免了因人為或系統的故障導致土壤濕度遠遠高于設定閾值而帶來的農業經濟損失。為了進行模糊化處理,必須利用誤差E的量化因子ke和誤差變化率EC的量化因子kec將輸入量由基本論域轉化到模糊論域。誤差E的量化因子ke和誤差變化率EC的量化因子kec以及輸出變化量U的比例因子ku由下式表示[10]:
電噴柴油機試車臺監控系統按通用化、系列化和組合化的要求設計,選用SRI-VC2100標準的控制器,主要由集控臺、監測數據采集箱和車鐘復示箱組成(見圖3)。該系統主要配置的模塊是遙控控制模塊、安保控制模塊和數據測量模塊等(見表1)。
ke=n1/|emax|=3/0.05=60
(2)
kec=n2/|ecmax|=3/0.03=100
(3)
ku=|Umax|/m=30/4=7.5
(4)
式中:n1,n2,m分別為偏差E、偏差變化率EC和輸出變量U的模糊論域最大值;emax、ecmax、umax分別為偏差E、偏差變化率EC和輸出變量U的基本論域最大值。
隸屬度函數的選擇遵循的規則是[11]:在誤差為零附近區域,采用分辨率較高的隸屬度函數;在誤差較大的區域,為使系統具有更好的魯棒性能,選擇分辨率較低的隸屬度函數。針對實際情況,為了更好地解決系統靈敏度和穩定性相矛盾的關系,對濕度偏差E語言值{NB,NM,NS,Z,S,PM,PB}分2種制定規則,隸屬度函數NB、NM、PM、PB采用高斯型隸屬度函數,NS、Z、PS采用三角隸屬度函數。濕度變化率采用三角隸屬度函數,輸出3個修正參數值采用三角隸屬度函,具體隸屬度函數曲線見圖2、圖3。
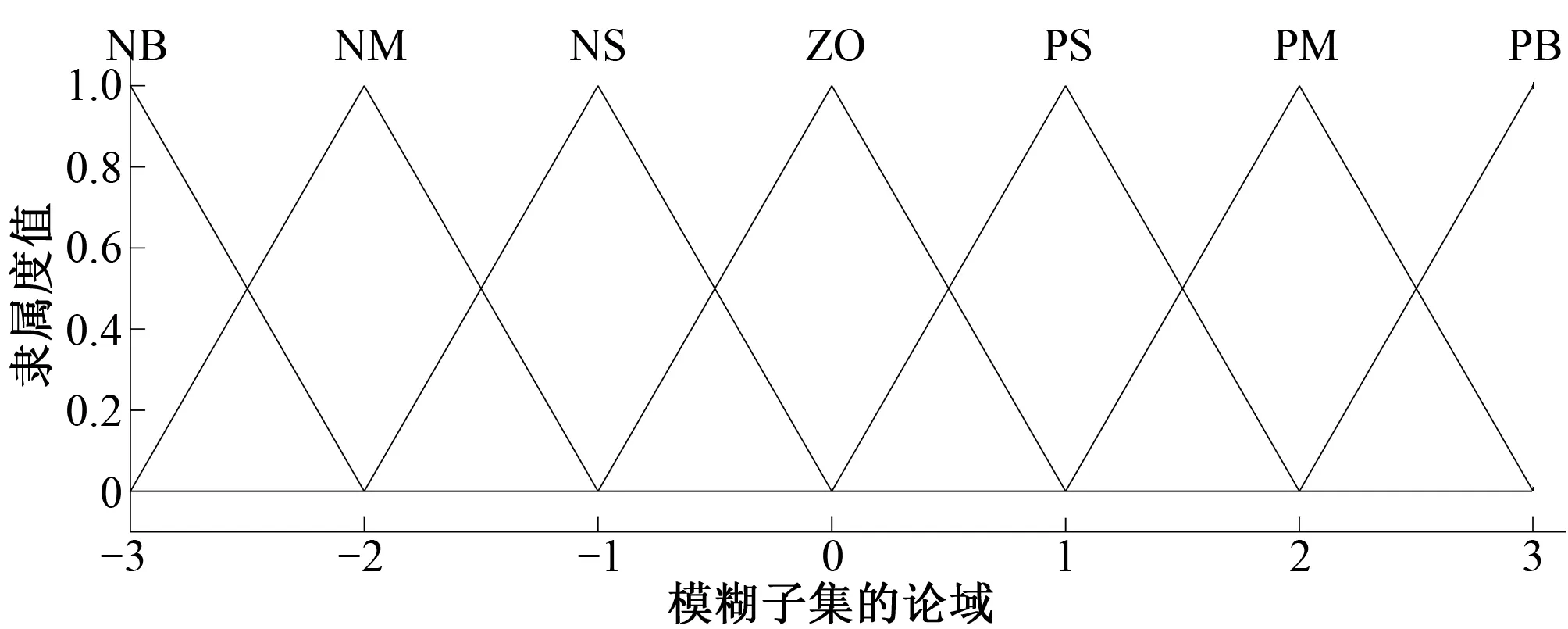
圖2 E隸屬度函數曲線
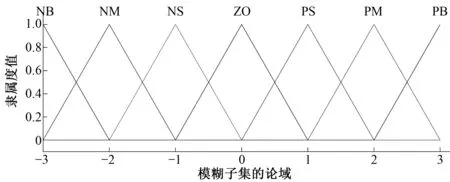
圖3 EC、ΔKp、ΔKi、ΔKd隸屬度函數曲線
2.3 PID參數整定一般規則[12]
(1)當誤差|E|較大時,為使系統具有較好的快速收斂性能,不論誤差的變化趨勢如何都應取較大的Kp和較小的Kd,同時為了避免積分飽和使得系統響應出現較大超調,應降低積分作用,Ki取值較小,通常取Ki=0。
(2)當誤差|E|和|EC|處于中等大小時,為防止超調過大,保證系統的收斂速度,Kp的取值應小一些,Ki取值中等大小。如果此時EEC<0,則應取較大的Kd防止系統超調;反之,EEC>0,應取適中的Kd,阻止誤差繼續增大。
(3)當誤差|E|較小或為零時,為保證系統的穩態性能,應取較大的Kp、Ki值,為了避免輸出相應在設定值附近出現劇烈震蕩以及增加調節時間,Kd值須要遵循原則是:當偏差|EC|值較大時,Kd取值較小;當偏差|EC|值較小時,Kd取值較大,通常Kd取值中等大小。
2.4 模糊PID控制邏輯規則表
模糊控制的核心是總結工程操作人員的技術知識和實際操作經驗,制定符合工程項目需求的模糊控制規則表。根據以上PID參數整定規則可制定模糊PID控制邏輯規則表,見表1~表3。
3 模糊PID控制系統模型搭建及simulink仿真

表1 ΔKp的模糊控制規則
表2ΔKi的模糊控制規則

EECNBNMNSZOPSPMPBNBNBZOPBNMPBPBNBNMNBZOPBNSPBZONBNSNBNSPBNSPBPSNBZONBNBPBZOPBPSNBPSNBNSPBZOPBPMNBPMNBZOPBPSPBZONBPBNBZOPBPSPBPBNB

表3 ΔKd的模糊控制規則
為了驗證所設計控制器的有效性,應用MATLAB環境下的Simulink仿真軟件對溫室灌溉系統進行建模與仿真,具體模型見圖4。
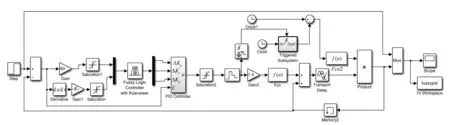
圖4 simulink搭建溫室灌溉系統仿真模型
模型中考慮到實際土壤水勢曲線為非線性,采用目標函數[13]Δy=sin(2 πu/T),由于土壤濕度從13%變化到23%用時為30 min,計算周期T=1 882 min。考慮到土壤濕度值受到多種因素影響,在灌溉過程中土壤中的水分會通過基質滲透或植物蒸騰作用而消耗,因此設定系統的損耗函數Fun2=exp(-u/500)。溫室灌溉系統是純時延系統,添加一個Transport Delay模塊,模擬延時環節。通過單獨PID控制器仿真分析,當PID Controller中的3個參數Kp、Ki、Kd的初始值設為Kp0=15、Ki0=0.5、Kd0=0.08且Kp的變化范圍為[10,20],Ki的變化范圍為[0,1],Kd的變化范圍為[0,0.16]時,系統的控制效果較好。PID控制器的3個參數Kp、Ki、Kd及其對應的輸出比例因子ap、ai、ad由以下公式表示:
Kp=ΔKpap+Kp0
(5)
Ki=ΔKiai+Ki0
(6)
Kd=ΔKdad+Kd0
(7)
(8)
(9)
(10)
式中:Kpmax、Kimax、Kdmax分別對應Kp、Ki、Kd變化范圍內的最大值;n3、n4、n5分別對應Kp、Ki、Kd模糊論域最大值。
仿真結果曲線見圖5,系統動態穩定局部放大曲線見圖6。

圖5 濕度仿真曲線
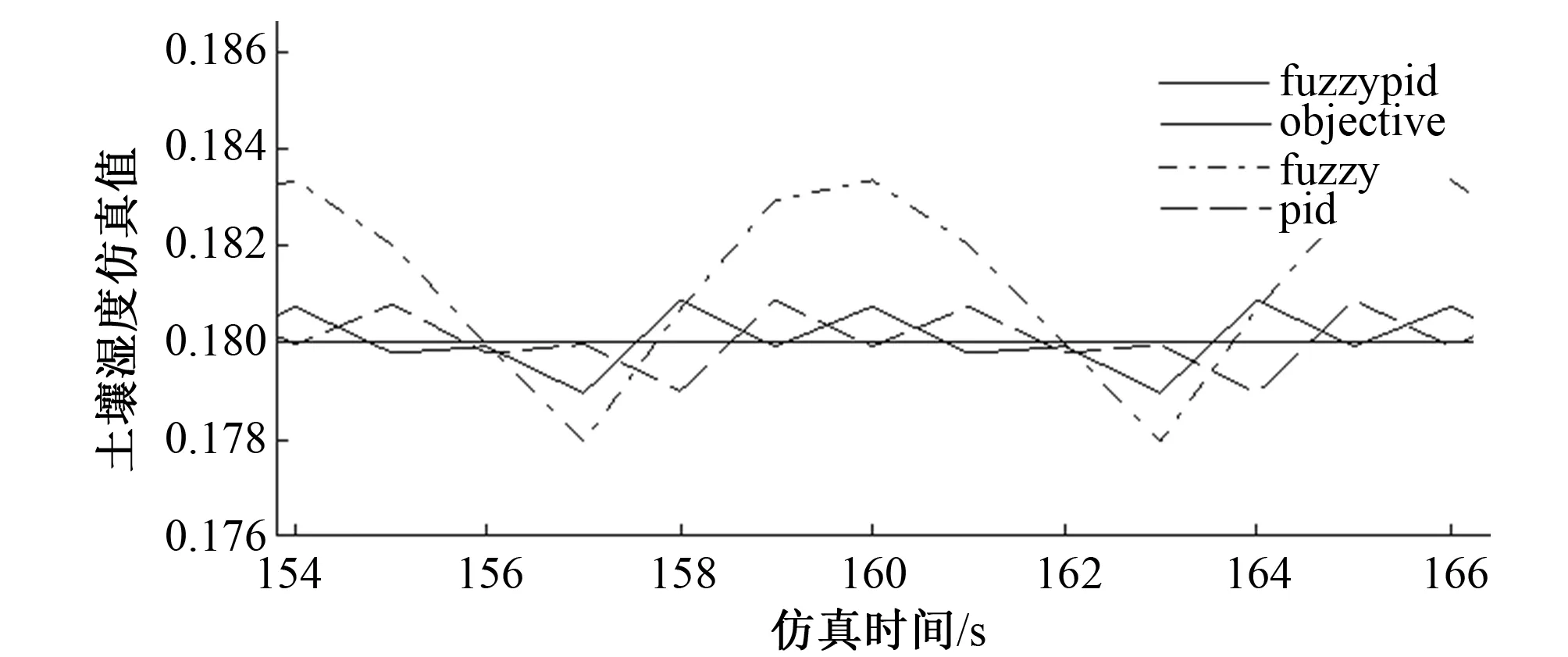
圖6 濕度仿真曲線局部放大
從仿真曲線可以看出,本文設計的PID模糊控制器能夠使目標濕度和控制濕度的誤差穩定 以內,與單一的PID控制器相比,誤差精度提高了2%左右;與單一的而模糊控制器相比,仿真曲線收斂速度快了20 s,且超調量減少了5%。仿真結果達到預期,系統設計符合溫室灌溉要求。
4 結 語
通過比較模糊控制器和PID控制器的優缺點,綜合設計模糊PID控制器,揚長避短,用Simulink搭建溫室灌溉控制系統,考慮影響植物生長的主要因素,控制土壤濕度穩定在植物生長所需最佳土壤濕度誤差范圍內。仿真曲線表明控制誤差可以穩定在5%范圍內,超調量為6.7%,仿真曲線收斂時長80 s,能夠達到溫室節水灌溉要求。該控制器對非線性,純時延系統有很好的魯棒性,穩態精度高,控制效果好,對實驗平臺的搭建、灌溉控制器策略的選擇有一定的借鑒意義。
:
[1] 鄧 忠,翟國亮,呂謀超,等. 我國農業應對干旱災害的技術研究現狀及展望[J]. 節水灌溉,2016,(8):162-165.
[2] 徐文靜,王翔翔,施六林,等. 中國節水灌溉技術現狀與發展趨勢研究[J]. 中國農學通報,2016,32(11):184-187.
[3] 杜云明,蓋麗娜,顏兵兵. 基于單片機的溫室灌溉控制系統設計[J]. 農機化究,2012,34 (12) 88-91.
[4] Zhu Zhijian, Zao Remu, Ni Jiaoti.Autocontrol variable voltage frequency type of irrigation Feri- gation device[J].Transaction of the CSAE,2005,21(9):94-97.
[5] 田思慶,曹 宇,魏 強,等. 基于模糊控制的智能滴灌控制系統設計[J]. 節水灌溉,2017,(6):101-104.
[6] 謝宋和,甘 勇. 單片機模糊控制系統設計與應用實例[M]. 北京: 電子工業出版社, 1999.
[7] 張育斌,魏正英,馬勝利,等.灰色預測模糊PID灌溉控制技術開發[J].中國農村水利水電,2016,(2):5-8.
[8] 謝仕宏.MATLAB控制系統動態仿真實例教程[M]. 北京:化學工業出版社, 2008.
[9] 陳年來,黃海霞,高慧娟,等.甜瓜葉片氣體交換特性和幼苗生長對土壤水分和大氣濕度的響應[J].蘭州大學學報(自然科學版),2009,45(4):73-77.
[10] 孫增圻,鄧志東,張再興.智能控制理論與技術[M].北京:清華大學出版社,2011.
[11] 梁月云,崔天時,何亞非. 溫室節水灌溉系統模糊控制器設計及MATLAB仿真[J]. 農機化研究,2014,36(6):202-205,209.
[12] 李 健,王冬青,王麗美. 模糊PID控制器設計及MATLAB仿真[J]. 工業控制計算機,2011,24(5):56-57,95.
[13] 徐立鴻. 一種新型溫室滴灌控制算法[C]∥ 中國農業工程學會.中國農業工程學會第七次全國會員代表大會及學術年會論文集.中國農業工程學會,2004:3.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
幸福(2018年33期)2018-12-05 05:22:42
Coco薇(2017年11期)2018-01-03 20:59:57
家庭影院技術(2017年9期)2017-09-26 03:41:45
