基于DeltaOS的測量定位雷達對動目標處理和顯示研究?
2018-05-29 11:50:23黃曉燕
艦船電子工程 2018年5期
劉 鐸 黃曉燕
(1.中國電子科技集團第二十研究所 西安 710068)(2.西安石油大學 西安 710072)
1 引言
雷達系統是一種具有強實時性應用的系統。隨著計算機和嵌入式技術的迅速發展,現通常采用Vxworks嵌入式操作系統來滿足其可靠性和實時性需求[1]。為了國家武器裝備的安全性,可靠性的考慮,國產化處理器和國產化操作系統的開發的需求越來越受重視,國產操作系統陸續推出,其中道系統(DeltaOS)便是其中的代表。
道系統(DeltaOS)是目前中國依靠自己技術和力量,自主研發的實時操作系統之一,龍芯3A是新一代的64位多核高性能通用處理器。處理器采用RISC架構,兼容MIPS指令,原生四核設計,基于龍芯3A處理器在DeltaOS操作系統被大量的運用于軍工武器裝備領域。本文主要研究基于龍芯3A處理器在DeltaOS操作系統下DeltaGUI圖形庫的開發和實時任務調度機制的研究,同時采用運動目標跟蹤算法和動目標軌跡外推算法,實時進行任務調度計算,并對動目標的動態勢圖進行顯示[2]。
2 DeltaGUI設計架構
DeltaOS操作系統支持搶占式多任務、任務的優先級調度、時間片輪轉、任務的優先級繼承等特點,DeltaGUI是為嵌入式系統提供圖形用戶界面的支撐軟件,是擴展操作系統人機交互功能的一個模塊[3]。DeltaGUI位于操作系統核心之上,如果要用它來構建一個實時任務系統,必須將它與實時操作系統內核集成。DeltaGUI以庫的形式為應用提供各種工具和組件來實現圖形界面[4]。
DeltaGUI圖形庫與外圍系統的組成關系原理如圖1所示。
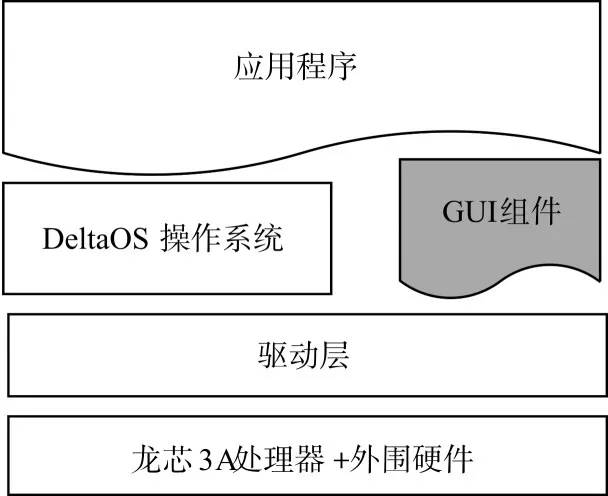
圖1 GUI體系架構組成框圖
DeltaGUI與外圍相接,以類庫的形式向應用程序提供編程接口,通過操作系統抽象層與具體實時操作系統聯系,而硬件抽象層使DeltaGUI無需直接和硬件交涉就能輕易掛接各種輸入、輸出設備[5];DeltaGUI通過消息來進行對象與對象間的通信與協作,采用數據結構DMessage來表示消息。該數據結構中的各個域分別表示了消息的類型、發送者、接收者以及消息所包含的其他信息等;DeltaGUI不斷調用消息隊列提供的各種函數對所有消息進行有序的處理。用戶也可以自己調用消息隊列的入隊函數把創建的消息加入到消息隊列中供DeltaGUI的對象處理[6]。
3 顯示圖形系統設計與實現
基于龍芯3A處理器,采用GUI組件的顯示,主要包括,其主要實現對設備的工作控制、分設備狀態監視顯示、節點信息態勢,目標特點等基本功能顯示。系統設計包括了顯示模塊、控制模塊以、接口模塊、網絡接收模塊和GPS接收模塊5部,系統采用了嵌入式實時操作系統DeltaOS,開發調試在lamdaPRo下進行,顯示圖形系統組成框圖如2所示。
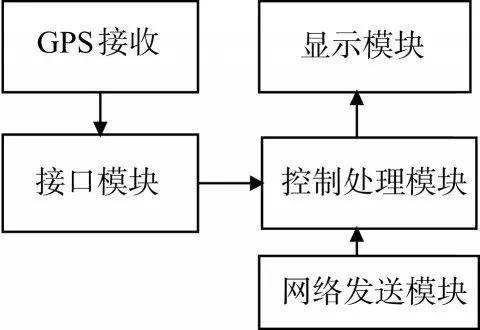
圖2 顯示圖形系統組成框圖
GPS接收模塊,主要為基準測量目標信號提供經度、緯度,高度和時間信息,以及保證設備運轉的秒信號。
接口模塊收到GPS信號后,通過PCI總線將收到的數據轉發給控制模塊。
網絡發送模塊,通過組播發送模式,將外部輸入導航信息,作戰信息發送控制模塊。
控制模塊,將接收到信息,進行分批處理,提取不同類型目標節點信息進行數據處理。
顯示模塊,根據不同的信息,通過任務優先級的,進行任務調度。
顯示軟件包括動目標軌跡的動態勢圖、被測量目標的實時距離和方位的顯示等信息,以及控制操控顯示。
4 運動目標跟蹤算法
測量定位雷達是通過兩部雷達之間按時隙周期進行接收和發射互測量原理,對被測目標的位置和方位進行精確定位,由于對測量精度的要求,需要進行實時預估,對測量得到的異常數據或誤差較大數據需要采用濾波算法進行處理。
α-β-γ濾波最常用的目標運動模型是勻加速運動模型[7],在該模型中,目標做勻加速直線運動,方程如下:
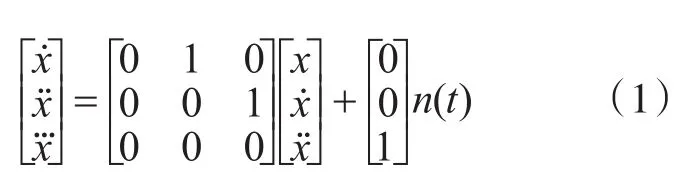
式中:x、x?、x?分別是運動目標的位置、速度分量和加速度分量;n(t)是均值為零的高斯白噪聲。
α-β-γ濾波是運動方程為勻加速的卡爾曼濾波的穩態解形式,運動目標中包含位置、速度和加速度,運動目標的狀態方程為

其中,狀態轉移矩陣為:過程噪聲分布矩陣為為零均值高斯白噪聲。量測方程為


新信息為

其中,增益
5 動目標軌跡外推算法
為滿足艦船運動目標狀態的更新頻率的需求,還需要對目標進行航跡平滑外推。測量過程匯總目標的運動狀態信息一般以秒級速度發布,若以接收到的信息頻率顯示會存在跳變現象,因此需要更短的時間更新目標運動狀態就需要對接收到的目標狀態信息和目標當前狀態信息對目標未來的運動狀態進行推算。
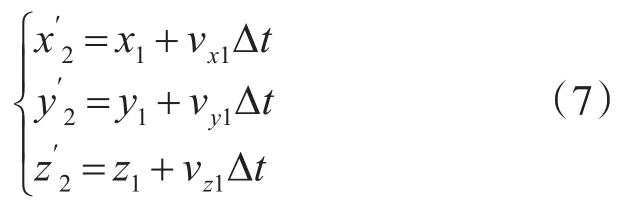
正常情況下運動目標從當前位置,經過時間Δt后能夠由預測推算位置
已知時刻t0目標的位置S0(x0,y0,z0),航向角φ0,俯仰角φ0,速度V0(vx0,vy0,vz0),經過時間 Δt后得到t1時刻目標的位置為
進而根據t1時刻的信息可推算得到t2時刻的位置為
目標從運動到點的速度為

其中,,則目標在的推算航向角為

目標從運動到點的航向轉向角速度為

目標在的推算俯仰角為
目標從運動到點的俯仰角轉向角速度為

6 現場實測實驗
根據現場實驗測量,第20個節點艦船為基準節點,稱為測量節點,采用α-β-γ濾波算法,對1~19個艦船進行測量,即被測節點,運動被測目標艦船做圓周勻速運動,初始距離分布在2km~20m之間,初始速度在20kn~40kn之間勻速運動,被測節點實時測量態勢圖如圖3~5所示。圖3表示為初始狀態下,被測目標未經過濾波處理,真實位置與預估目標位置存在較大的誤差;經過一定時間運動后,被測目標與外推值位置無限接近,如圖4所示,當經過較長時間穩定運動后,真實動目標位置與預估外推位置重合,如圖5所示,1~19被測節點實時測量值與外推值誤差值,圖6所示。
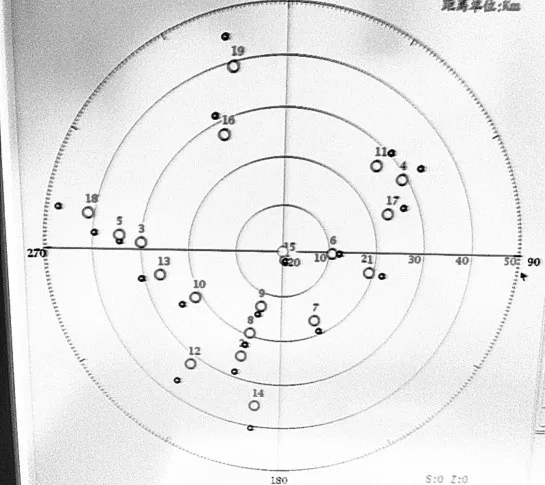
圖3 動目標初始運動位置
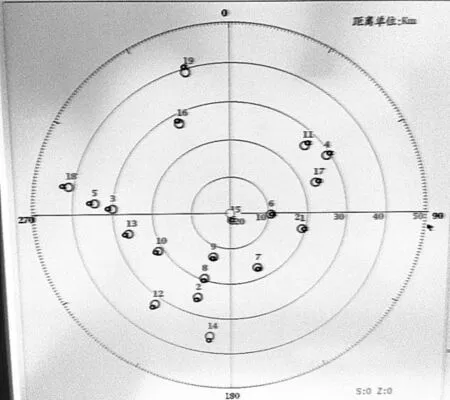
圖4 動目標運動中

圖5 動目標運動穩定
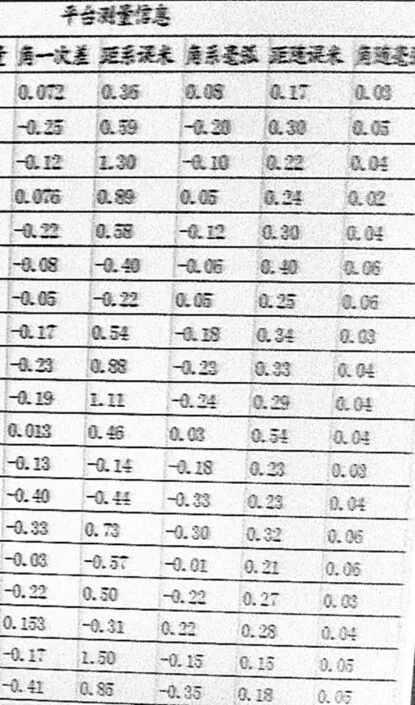
圖6 動目標與外推值誤差
7 結語
由上述試驗結果表明,采用α-β-γ濾波算法可以有效地對干擾進行剔除,通過外推算法可以精確地預估目標的運動軌跡,從而提高測量定位雷達的測量與定位精度,運用國產龍芯3A-1000處理器下的道系統(DeltaOS)開發,可以保證雷達的實時性和精度指標要求,提高了雷達的保密安全性,在軍隊武器裝備具有很大的推廣應用意義。
參考文獻
[1]丁鷺飛,耿富錄,陳建春.雷達原理[M].西安:電子工業出版社,2010.
[2]道系統使用手冊[M].北京科銀京成技術有限公司,2017.
[3]航空電子應用軟件接口要求[M].中國人民解放軍總裝備部,2015.
[4]鄧中亮,段大高,崔巖松.嵌入式系統設計[M].北京:北京郵電大學出版社,2008.
[5]郭兵,熊光澤,陳麗蓉,蔡建平.嵌入式應用軟環境Del?taOS/Lamtool的設計與實現[C]//第十屆全國抗惡劣環境計算機學術年會,2001:28-31.
[6]李陽,曹萬華.基于DeltaGUI的雙屏顯示技術研究[J].艦船電子工程,2004,24(6):82-84.
[7]朱瑞豐,張軍.基于修正α-β-γ濾波的多目標跟蹤算法研究[J].天津職業技術師范大學學報,2013.9,23(3):12-14
[8]張萍萍,孫永侃,張莉,林宗祥.艦船科學技術.視景仿真中運動目標的航跡平滑外推算法[J].2013.4,35(4):49-53.
[9]陳亮,吳小俊.基于常增益組合濾波器的目標跟蹤算法[J].計算機應用與軟件,2009(7):16-17.
[10]韓宏亮.基于IMM的雷達目標跟蹤算法研[D].南京:南京信息工程大學,2011.
[11]何友.雷達數據處理及應用[M].第二版,北京:電子工業出版社,2009.
[12]王繼森.船舶航跡智能控制系統研究[D].哈爾濱:哈爾濱工程大學,2008.
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中華手工(2017年2期)2017-06-06 23:00:31
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
祝您健康(1987年2期)1987-12-30 09:52:28
