基于能耗最優(yōu)的多足機器人綜合步態(tài)優(yōu)化方法
2018-05-28 01:03:00,,2,*,,2
中國空間科學(xué)技術(shù) 2018年2期
,,2,*,,2
1. 北京控制工程研究所,北京 100190 2. 空間智能控制技術(shù)重點實驗室,北京 100190
與輪式或履帶式機器人相比,足式機器人憑借更好的地形適應(yīng)能力,成為移動機器人研究領(lǐng)域的熱點之一,然而高能耗已成為制約足式機器人廣泛應(yīng)用和進(jìn)一步發(fā)展的瓶頸問題之一[1]。影響足式機器人步行能耗的因素較多,主要包括機器人自身的結(jié)構(gòu)參數(shù)和步態(tài)參數(shù)[2],當(dāng)機器人結(jié)構(gòu)確定后,通過設(shè)計合理的步態(tài)參數(shù)來提高步行能量效率十分必要。
保證多足機器人步態(tài)的穩(wěn)定性是步態(tài)優(yōu)化過程中的必要約束條件,對于多足機器人步態(tài)的穩(wěn)定性研究,當(dāng)前最常用的是基于機器人重心的靜穩(wěn)定性方法,以四足機器人慢走步態(tài)為例,該方法要求機器人重心時刻保持在支撐區(qū)域內(nèi),而為了保證一定的穩(wěn)定裕度,支撐區(qū)域需要進(jìn)行一定的收縮處理,這會導(dǎo)致連續(xù)行走時穩(wěn)定支撐區(qū)域不連續(xù),因此需要加入四足支撐階段用于將機器人重心從上一個穩(wěn)定支撐區(qū)域移動至下一個穩(wěn)定支撐區(qū)域,影響機器人行走的連續(xù)性。零力矩點(Zero Moment Point,ZMP)穩(wěn)定性理論[3]已廣泛應(yīng)用于雙足機器人的平衡控制問題中,有學(xué)者指出,該理論并非雙足機器人步態(tài)穩(wěn)定的充分條件,只是機器人腳板不發(fā)生偏轉(zhuǎn)的充分條件[4];對于多足機器人若把機器人的支撐區(qū)域理解為腳板,那么腳板不發(fā)生偏轉(zhuǎn)與機器人不發(fā)生傾倒是相一致的,因此ZMP穩(wěn)定性理論適用于多足機器人步態(tài)的穩(wěn)定性分析。本文采用基于ZMP穩(wěn)定性理論的機身軌跡規(guī)劃方法,以確保步態(tài)參數(shù)優(yōu)化過程中步態(tài)的穩(wěn)定性。
目前針對多足機器人步態(tài)優(yōu)化方面的研究主要有以下一些成果,文獻(xiàn)[5]從仿生學(xué)的角度對四足機器人擺動腿軌跡進(jìn)行了研究,文獻(xiàn)[6]分析對比了3種特殊的足端軌跡對機器人移動能耗的影響,并未考慮步態(tài)參數(shù)對機器人運動穩(wěn)定性的影響;文獻(xiàn)[7]基于ZMP穩(wěn)定性理論對四足機器人機身運動軌跡進(jìn)行了優(yōu)化,文獻(xiàn)[8]為提高四足機器人爬行過程中的靜穩(wěn)定性和行走速度,對爬行步態(tài)進(jìn)行了優(yōu)化,但并未考慮到行走過程中的擺動腿軌跡和能耗優(yōu)化問題;文獻(xiàn)[9-11]雖然在步態(tài)優(yōu)化過程中綜合考慮了擺動腿軌跡和機身運動軌跡,但其優(yōu)化對象為簡化的機器人平面連桿模型,這種簡化的動力學(xué)模型不能準(zhǔn)確真實地反映足式機器人的行走過程。
針對上述分析,本文提出一種基于能耗最優(yōu)的多足機器人綜合步態(tài)優(yōu)化方法,為了在優(yōu)化過程中同時優(yōu)化擺動腿軌跡、機身運動軌跡和步態(tài)參數(shù),并且保證機器人的步態(tài)穩(wěn)定性,將優(yōu)化過程轉(zhuǎn)換為兩個嵌套的子優(yōu)化問題。首先,采用一種基于ZMP穩(wěn)定性理論的機身運動軌跡規(guī)劃方法,針對給定的下一步落足點和支撐多邊形,利用優(yōu)化的方法規(guī)劃出機身運動軌跡,在保證機身軌跡連續(xù)平滑的同時,確保機器人在邁步過程中的穩(wěn)定性。其次,提出一種基于能耗指標(biāo)的周期性步態(tài)參數(shù)優(yōu)化方法,建立機器人虛擬樣機模型作為步態(tài)優(yōu)化模型,對步態(tài)參數(shù)、擺動腿足端軌跡和機身運動軌跡同時進(jìn)行優(yōu)化,得到使機器人前進(jìn)單位距離能耗最優(yōu)的步態(tài)。
1 機器人結(jié)構(gòu)與坐標(biāo)系建立
本文以四足機器人連續(xù)慢走步態(tài)為例研究機器人步態(tài)參數(shù)優(yōu)化方法,該方法通過簡單推廣同樣適用于其他多足機器人的相應(yīng)步態(tài)。為方便描述,將機器人的四條腿按左前腿、右前腿、左后腿、右后腿的順序進(jìn)行編號,分別為腿1、腿2、腿3、腿4。連續(xù)慢走步態(tài)情況下每次僅有一條腿抬起向前邁步,另外三條腿支撐機器人身體前進(jìn),機器人不存在四足支撐軀體移動調(diào)整的過程,共有6種邁步次序,本文采用邁步次序為1-4-2-3的步態(tài),已有研究成果表明該邁步順序穩(wěn)定性最好[12]。
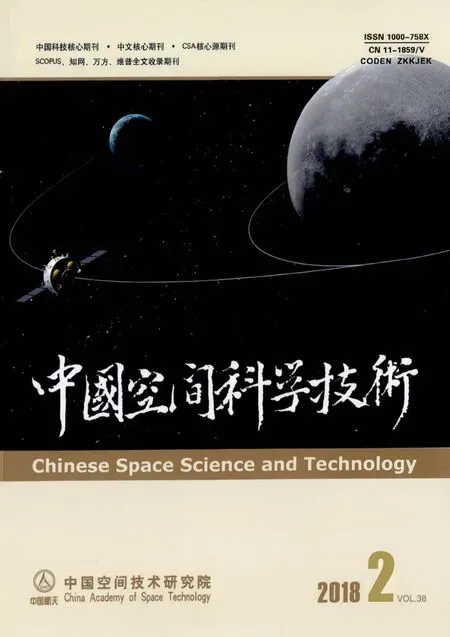
機器人構(gòu)型如圖1所示,機器人包含4條腿,每條腿具有3個關(guān)節(jié),分別為根關(guān)節(jié)(偏航自由度)、髖關(guān)節(jié)(俯仰自由度)和膝關(guān)節(jié)(俯仰自由度)。
圖1 四足機器人結(jié)構(gòu)示意Fig.1 Structure of the quadruped robot
定義如下幾個坐標(biāo)系(如圖1所示):機體坐標(biāo)系{B}固連于機器人身體,原點位于機器人身體中心,x軸指向機器人右方,y軸指向機器人正前方,z軸垂直于身體向上;軌跡規(guī)劃坐標(biāo)系{O}原點位于機器人身體中心在地面的投影點,y軸為機體坐標(biāo)系的y軸在水平面的投影方向,z軸垂直向上,x軸方向滿足右手坐標(biāo)系法則。
2 機身運動軌跡規(guī)劃方法
本節(jié)采用一種基于ZMP穩(wěn)定性理論的機身運動軌跡規(guī)劃方法,利用當(dāng)前足端位置和下一步的落足點,生成機身運動軌跡,其主要思想如下:針對給定的下一步落足點和支撐多邊形,規(guī)劃一條機身運動軌跡,保證機身軌跡連續(xù)平滑的同時,確保機器人在邁步過程中的穩(wěn)定性。
本節(jié)后續(xù)推導(dǎo)如無特別說明均在軌跡規(guī)劃坐標(biāo)系{O}下進(jìn)行,假設(shè)機身在y軸方向運動軌跡由n段分段函數(shù)描述,每段軌跡可用如下一個5次多項式表示:
hi·lyi(i=1,2,…,n)(1)
式中:ybi(t)表示機器人第i條重心軌跡;ai~fi為第i條重心軌跡多項式系數(shù),即為待優(yōu)化參數(shù);ti為第i段軌跡內(nèi)的時間變量,
lyi=[aibicidieifi]T
優(yōu)化過程的目標(biāo)函數(shù)取為重心軌跡的加速度平方和[13],每一段的目標(biāo)函數(shù)為:
(2)
其中T為每一段軌跡的持續(xù)時間,
最終的目標(biāo)函數(shù)為每一段曲線目標(biāo)函數(shù)的和,因此可統(tǒng)一為待優(yōu)化參數(shù)的二次型形式:
(3)
為了建立ZMP穩(wěn)定性約束,考慮如下經(jīng)典的近似ZMP模型[14]:
(5)

基于ZMP穩(wěn)定性理論,在邁步過程中ZMP必須一直保持在機器人支撐區(qū)域內(nèi),為了保證一定的穩(wěn)定裕度,支撐區(qū)域需要進(jìn)行一定的收縮處理,此處可通過判斷機器人ZMP與支撐三角形前后邊的位置來判定機器人的步態(tài)穩(wěn)定性。對于式(1)給出的重心運動軌跡,可根據(jù)式(4)求出相應(yīng)的ZMP軌跡,設(shè)支撐區(qū)域可由3個支撐足端連線組成的三角形描述,在此對機器人的四條腿重新編號,令與擺動腿同側(cè)的足端在坐標(biāo)系{O}中的坐標(biāo)為pa(xa,ya),擺動腿對側(cè)的前足和后足坐標(biāo)分別為pb(xb,yb),pc(xc,yc),如圖2所示。以支撐三角形區(qū)域前進(jìn)方向的邊papb為例,ZMP穩(wěn)定性約束可描述為:
(6)
式(6)可寫為:
r1xZMP+r2yZMP+r3>0(7)
其中xZMP和yZMP為機器人ZMP坐標(biāo),
r1=yb-ya
r2=xa-xb
r3=(xb-xa)ya-(yb-ya)xa
將ZMP模型帶入式(6),可將其改寫為如下關(guān)于待優(yōu)化參數(shù)的非線性不等式形式:
AiLi>-r3(8)


圖2 支撐區(qū)域示意Fig.2 Support area in the ground reference frame
注1:對于其他多足機器人,步行過程中的穩(wěn)定支持區(qū)域不一定為三角形,而是由除邁步腿外的立足點圍成的多邊形區(qū)域,此時同樣可由式(6)形式的不等式描述步態(tài)穩(wěn)定性約束條件。
為確保在邁步過程中,ZMP一直保持在機器人支撐區(qū)域內(nèi),將ZMP軌跡離散化,采樣周期取為10 ms,每個時刻都必須滿足上述穩(wěn)定性約束。因此機身運動軌跡規(guī)劃問題轉(zhuǎn)化為一個目標(biāo)函數(shù)為二次型形式,約束為線性約束的二次規(guī)劃問題,本文采用內(nèi)點法(Interior Point Method)求解[15],其基本思想是從可行域內(nèi)一初始點出發(fā),沿著可行方向,找出使目標(biāo)函數(shù)下降的下一個點,保持每一個迭代點是可行域的內(nèi)點,當(dāng)?shù)c靠近邊界時,目標(biāo)函數(shù)驟然增大,阻止迭代點穿越邊界。優(yōu)化過程的輸入變量為當(dāng)前機器人足端位置和下一邁步腿的落足點位置,優(yōu)化過程的輸出為機身運動軌跡。
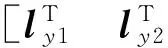
本文機器人采用連續(xù)慢走步態(tài),行走過程中支撐區(qū)域不連續(xù),基于本節(jié)提出的機身運動軌跡規(guī)劃方法,依舊可以生成一條穩(wěn)定的機身運動軌跡,原因在于通過利用機器人重心加速度的跳變,可實現(xiàn)機器人重心軌跡連續(xù)的同時,ZMP軌跡發(fā)生跳變,由上一個穩(wěn)定支撐區(qū)域跳變到下一個穩(wěn)定支撐區(qū)域,如圖3所示,圖中虛線圍成的三角形表示當(dāng)前穩(wěn)定支撐區(qū)域,實線圍成的三角形表示下一步穩(wěn)定支撐區(qū)域,空心圓形表示機器人重心,實心菱形表示機器人ZMP。
圖3 機器人重心與ZMP軌跡示意Fig.3 Center of gravity and ZMP trajectoriesof the robot
3 周期性步態(tài)優(yōu)化方法
利用第2節(jié)提出的機身運動軌跡規(guī)劃方法,結(jié)合擺動腿軌跡,提出一種周期性步態(tài)優(yōu)化方法。一個完整的步態(tài)周期由4個邁步周期組成,為簡化優(yōu)化問題,可令每個邁步周期的擺動腿軌跡相同。假設(shè)擺動腿足端軌跡在機身坐標(biāo)系內(nèi)采用貝塞爾曲線形式描述,y方向軌跡方程為:
(9)
式中:M為正整數(shù);s=t/tw,t∈[0,tw]為每一步的時間變量,tw為擺動相時間。擺動腿足端在z方向軌跡同樣可用一個上述形式的貝塞爾曲線描述,進(jìn)而可根據(jù)逆運動學(xué)方程求解出各個關(guān)節(jié)軌跡[16-18]。對于連續(xù)慢走步態(tài),當(dāng)步態(tài)周期和步長確定后,可以計算出每一邁步過程中的足端位置和下一步的落足點,因此機器人重心運動軌跡可根據(jù)第2節(jié)提出的機身軌跡規(guī)劃方法求得。
本文提出的周期性步態(tài)優(yōu)化方法的待優(yōu)化參數(shù)可用如下一個向量描述:


目標(biāo)函數(shù)選取為前進(jìn)單位距離的關(guān)節(jié)能耗,關(guān)節(jié)能耗為4條腿3個關(guān)節(jié)在整個步態(tài)周期內(nèi)的能耗之和[19],計算如下:

為保證機器人形成周期性平穩(wěn)步態(tài),優(yōu)化過程需滿足如下約束條件:
1)穩(wěn)定性約束,穩(wěn)定性約束可在第2節(jié)提出的機身運動軌跡優(yōu)化方法上改進(jìn)得到,當(dāng)步態(tài)參數(shù)確定后,整個步態(tài)周期內(nèi)的4個邁步落足點就可以確定,對于每個邁腿階段,可根據(jù)第2節(jié)提出的機身運動軌跡規(guī)劃方法生成一條穩(wěn)定的機身運動軌跡。由于機身運動軌跡優(yōu)化方法是一個凸二次規(guī)劃問題,采用內(nèi)點法可快速求解,因此該約束條件是可現(xiàn)實的。若機身軌跡優(yōu)化方法無解,則表明在該步態(tài)參數(shù)下無法生成一條穩(wěn)定的機身運動軌跡。
2)周期性約束,機器人的步態(tài)具有連續(xù)性和周期性,前一邁步周期的機器人運動軌跡的位置、速度和加速度終值與下一邁步周期的初值相同,此約束可表示為關(guān)于待優(yōu)化參數(shù)向量的線性等式。
3)步行速度約束,每個步態(tài)周期仿真完成后,需要校驗機器人整個步態(tài)周期內(nèi)的平均前進(jìn)速度,不小于最小前進(jìn)速度:
(11)
式中:v為機器人實際前進(jìn)速度;vmin為最小前進(jìn)速度。
4)足端工作空間約束,足端軌跡應(yīng)在機器人的足端工作空間內(nèi),并且滿足一定的越障高度,即由步態(tài)參數(shù)生成的擺動腿軌跡的最大抬腿高度不小于事先設(shè)定的安全高度。
基于上述分析可知,周期性步態(tài)優(yōu)化問題是一個約束非線性優(yōu)化問題,可采用信賴域方法[20]進(jìn)行參數(shù)尋優(yōu)估計,它是一種求解非線性優(yōu)化問題的有效方法,具有較強的收斂性。
4 四足機器人仿真
在ADAMS中搭建四足機器人虛擬樣機,如圖4所示,采用ADAMS和SIMULINK聯(lián)合仿真技術(shù)進(jìn)行虛擬樣機仿真。機器人總質(zhì)量200 kg,大腿長度0.4 m,小腿長度0.3 m。

圖4 四足機器人ADAMS模型Fig.4 Model of the quadruped robot in ADAMS
首先根據(jù)以往的研究和仿真經(jīng)驗選取一組合適的步態(tài)參數(shù)作為優(yōu)化程序的初值。根據(jù)機器人足端工作空間的活動范圍,綜合越障高度、最長跨距和身體調(diào)整范圍等指標(biāo),選取機器人初始步態(tài)參數(shù)如下:行走高度0.7 m、步長0.4 m、步態(tài)周期2 s,參考四足機器人步態(tài)研究中常用的復(fù)合擺線形式足端軌跡[21],選取貝塞爾曲線的參數(shù)使得擺動腿足段軌跡與復(fù)合擺線近似。
將上述步態(tài)參數(shù)作為優(yōu)化程序的初值進(jìn)行優(yōu)化,優(yōu)化結(jié)果見表1,優(yōu)化后機器人前進(jìn)單位距離能耗降低了約14%。
圖5為經(jīng)過優(yōu)化后的一個步態(tài)周期內(nèi)機身前進(jìn)方向運動軌跡曲線,圖6為擺動腿足端軌跡曲線。圖5中點線為機器人ZMP軌跡,實線為機器人重心軌跡,點劃線為前穩(wěn)定區(qū)域的邊界,虛線為后穩(wěn)定區(qū)域的邊界;前后穩(wěn)定區(qū)域邊界內(nèi)的部分表示穩(wěn)定支撐區(qū)域。機器人邁步順序為1-4-2-3,在0.65 s時機器人由邁腿1切換至邁腿4,此時穩(wěn)定支撐區(qū)域由腿2、腿3、腿4組成的后三角區(qū)域轉(zhuǎn)換成由腿1、腿2、腿3組成的前三角區(qū)域,由于設(shè)定穩(wěn)定裕度為0.02 m,因此在0.65 s前后機器人的穩(wěn)定支持區(qū)域發(fā)生跳變且互相不接觸,因此機器人ZMP軌跡發(fā)生跳變,保證ZMP一直在穩(wěn)定支撐區(qū)域內(nèi)。同理在1.95 s時機器人由邁腿2切換至邁腿3,機器人的穩(wěn)定支持區(qū)域發(fā)生跳變。在1.3 s時,機器人由邁腿4切換至邁機身同側(cè)的腿2,此時邁腿2前后的穩(wěn)定支持區(qū)域相交,機器人ZMP軌跡保持連續(xù)。由重心軌跡可以看出,機器人在一個步態(tài)周期內(nèi)重心前進(jìn)距離為0.6 m,與E/β相等,表明步態(tài)具有周期性。
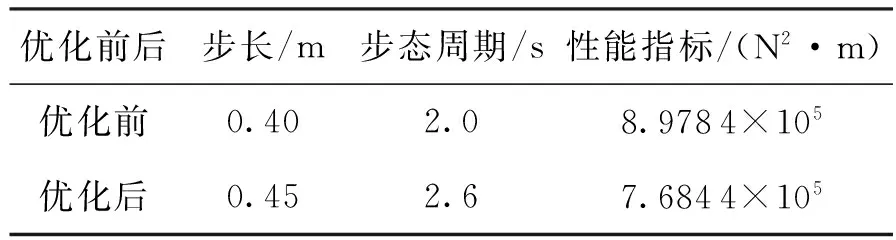
表1 步態(tài)優(yōu)化結(jié)果
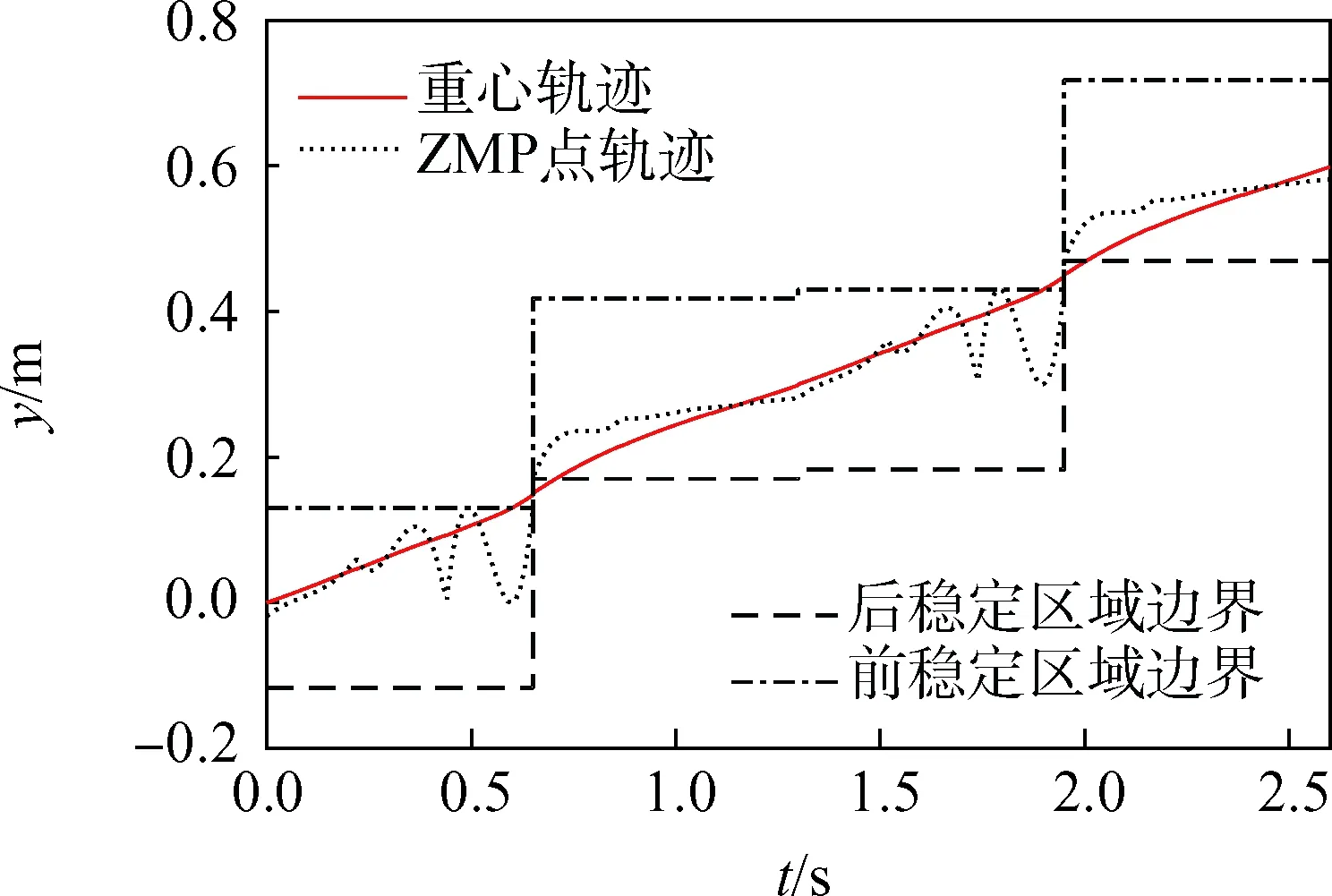
圖5 機器人重心與ZMP軌跡Fig.5 Center of gravity and ZMP trajectoriesof the robot
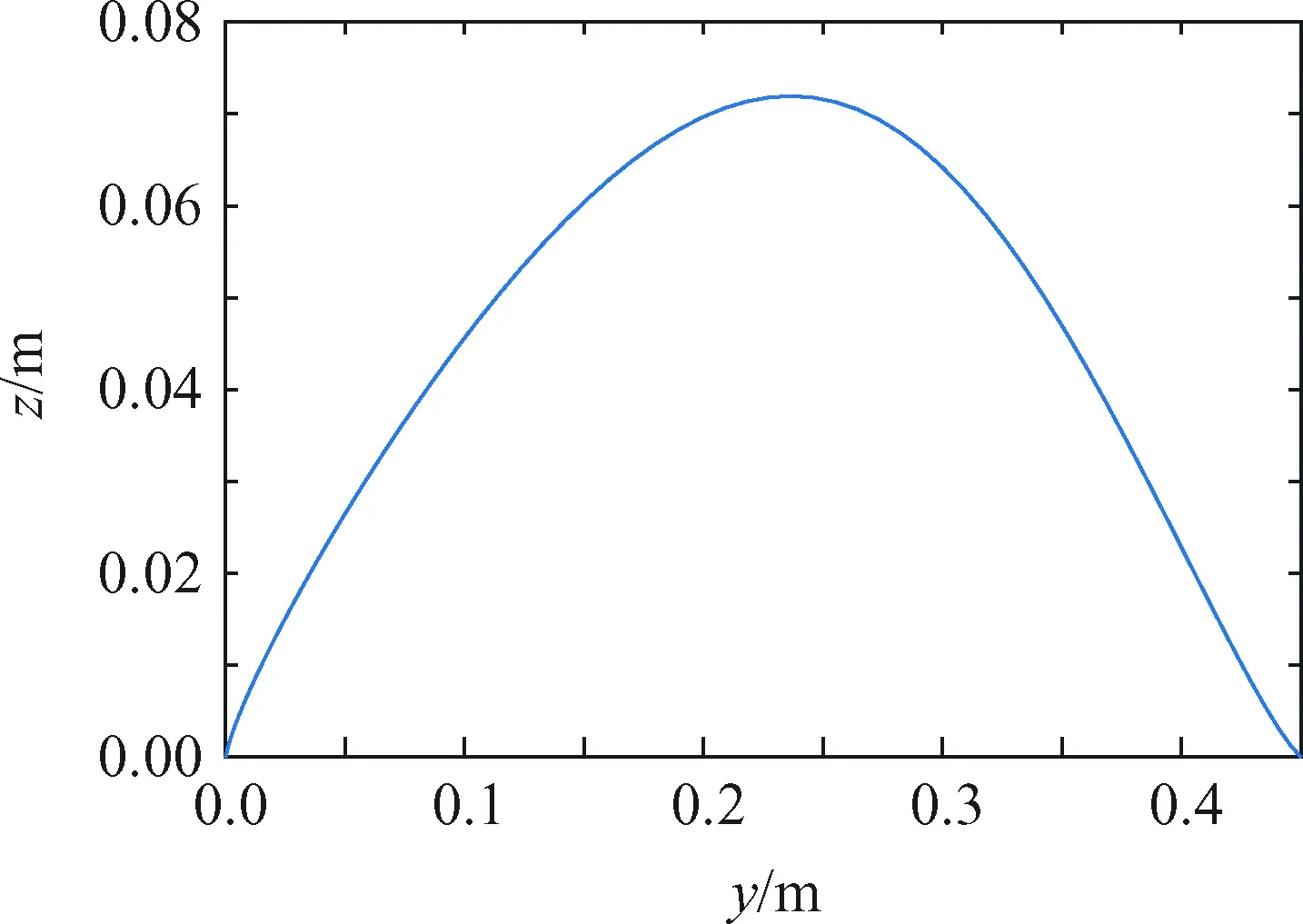
圖6 擺動腿足端軌跡Fig.6 Support area in the ground reference frame
采用優(yōu)化后的步態(tài)參數(shù)進(jìn)行虛擬樣機仿真,仿真時間設(shè)為10 s,第1 s為起始步態(tài),機器人原地調(diào)整至周期性步態(tài)的初始狀態(tài),之后采取周期性步態(tài)前進(jìn)。機器人在前進(jìn)方向的位移與速度曲線如圖7所示,機身俯仰角和滾轉(zhuǎn)角曲線如圖8所示,俯仰角和滾轉(zhuǎn)角波動均在1°以內(nèi),可知,采用優(yōu)化后的步態(tài)參數(shù),機器人能平穩(wěn)前進(jìn)。
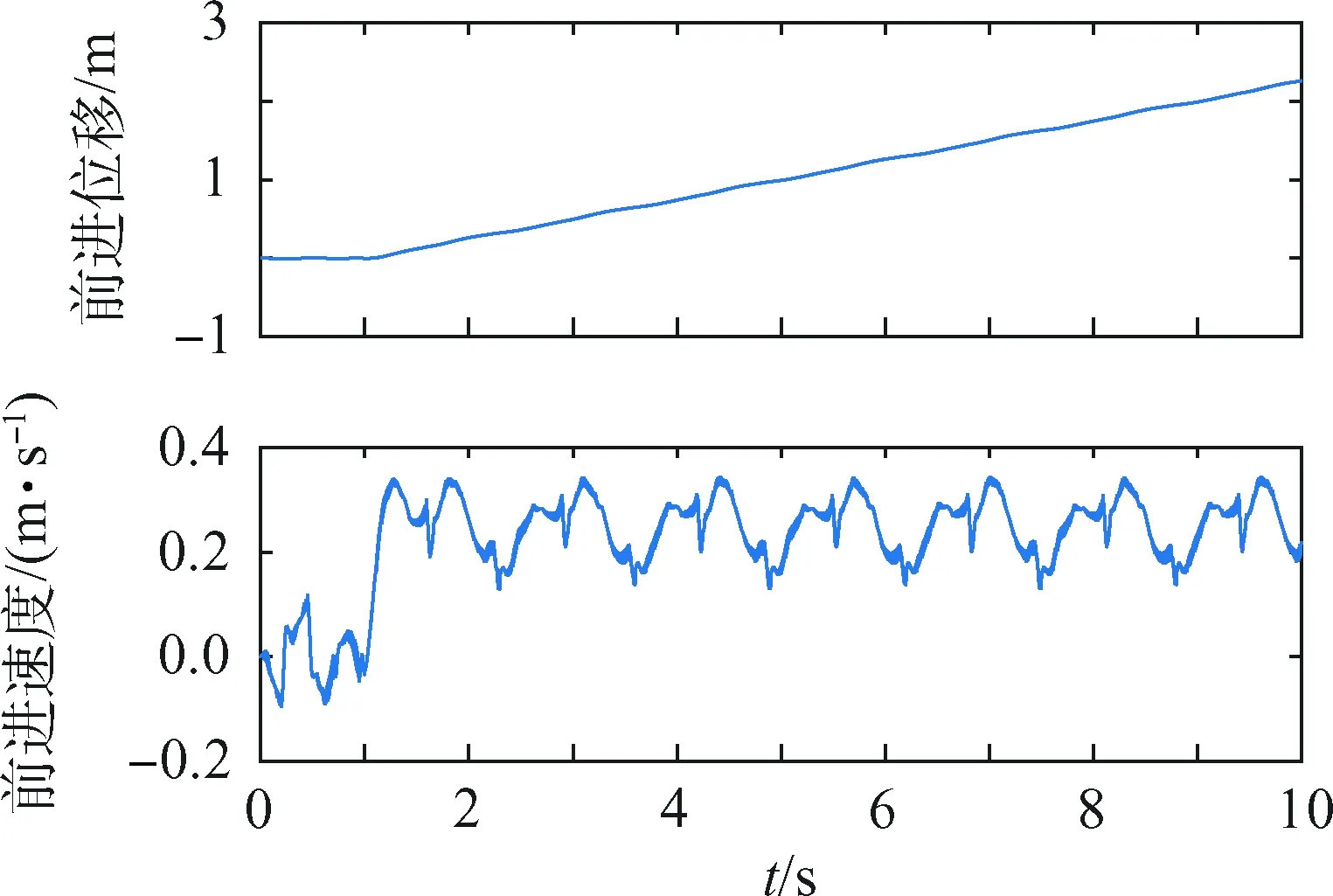
圖7 機器人前進(jìn)方向位移和速度Fig.7 Robot forward position and velocity
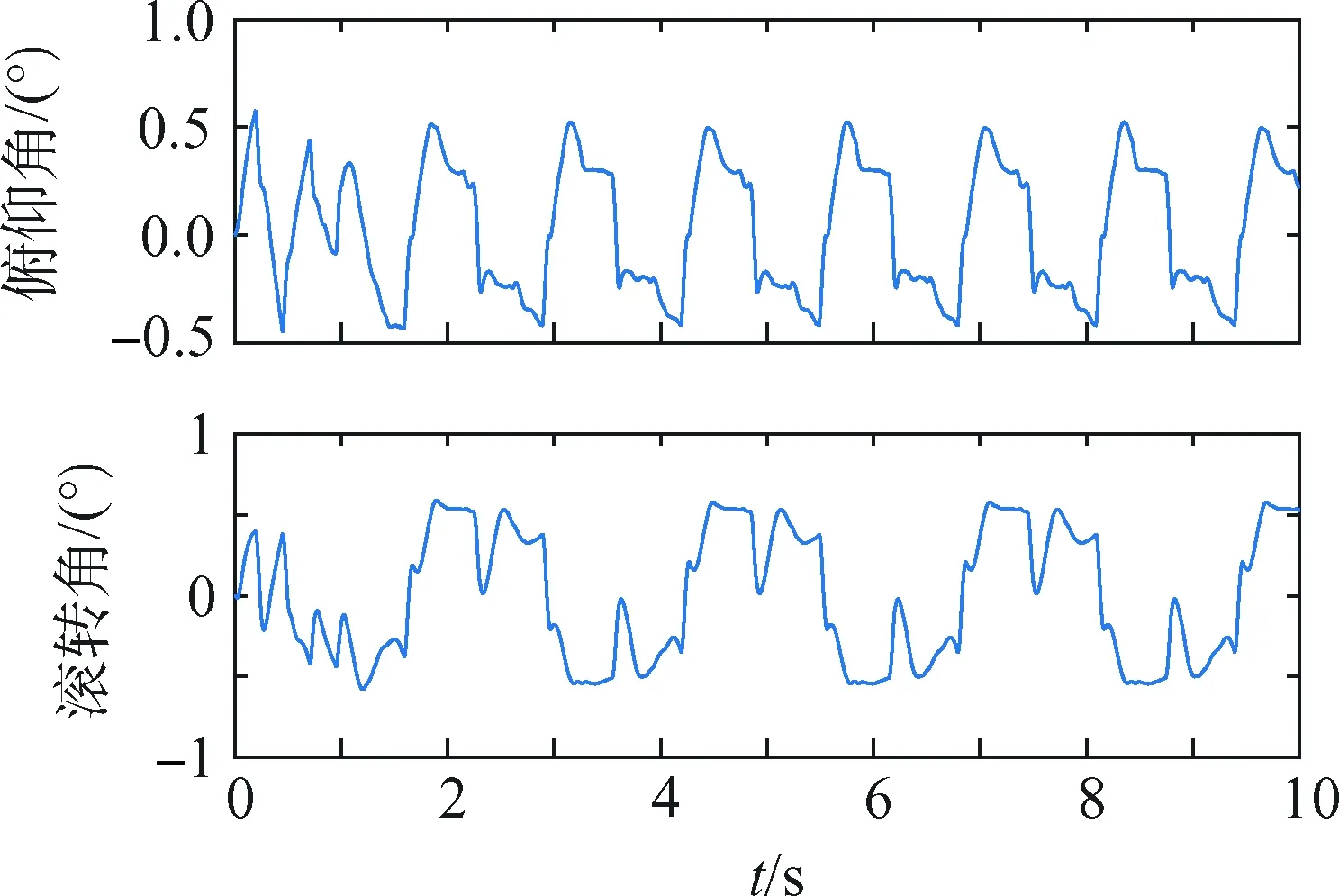
圖8 機身俯仰角和滾轉(zhuǎn)角Fig.8 Body pitch and roll angle
5 結(jié)束語
本文研究了一種多足機器人周期性步態(tài)優(yōu)化方法,采用機器人前進(jìn)單位距離的能耗作為性能指標(biāo),以四足機器人為例,建立四足機器人虛擬樣機模型作為步態(tài)優(yōu)化模型,對步態(tài)參數(shù)、擺動腿足端軌跡和機身運動軌跡同時進(jìn)行優(yōu)化,同時采用一種基于ZMP穩(wěn)定性理論的機身運動軌跡規(guī)劃方法保證優(yōu)化過程中機器人的穩(wěn)定性,最后仿真結(jié)果驗證了步態(tài)優(yōu)化方法的有效性。
參考文獻(xiàn)(References)
[1] 丁良宏. BigDog四足機器人關(guān)鍵技術(shù)分析[J]. 機械工程學(xué)報,2015,51(7):1-23.
DING L H. Key technology analysis of BigDog quadruped robot[J]. Journal of Mechanical Engineering,2015,51(7):1-23(in Chinese).
[2] 楊亮,傅瑜,付根平,等. 基于能效優(yōu)化的仿人機器人跑步步態(tài)優(yōu)化與控制[J]. 計算機科學(xué),2016,43(6):270-275.
YANG L,F(xiàn)U Y,F(xiàn)U G P,et al. Running gait planning and control for humanoid robot based on energy efficiency optimization[J]. Computer Science,2016,43(6):270-275(in Chinese).
[3] VUKOBRATOVIC M,BOROVAC B. Zero-moment point—thirty five years of its life[J]. International Journal of Humanoid Robotics,2004(1):157-73.
[4] CARON S,PHAM Q C,NAKAMURA Y. ZMP support areas for multi-contact mobility under frictional constraints[J]. IEEE Transactions on Robotics,2015,99:1-14.
[5] ASCANI S,LIBERATI F,F(xiàn)ARABI R,et al. Horse-like walking,trotting,and galloping derived from kinematic motion primitives (kMPs)and their application to walk/trot transitions in a compliant quadruped robot[J]. Biological Cybernetics,2013,107(3):309-320.
[6] 雷靜桃,王峰,俞煌穎. 四足機器人軌跡規(guī)劃及移動能耗分析[J]. 機械設(shè)計與研究,2014,30(1):29-34.
LEI J T,WANG F,YU H Y. Analysis on trajectory planning and energy consumption of quadruped robot[J]. Machine Design and Research,2014,30(1):29-34(in Chinese).
[7] 劉飛,陳小平. 使用零力矩點軌跡規(guī)劃的四足機器人步態(tài)進(jìn)化方法[J]. 機器人,2010,32(3):398-404.
LIU F,CHEN X P. Gait evolving method of quadruped robot using zero-moment point trajectory planning[J]. Robot,2010,32(3):398-404(in Chinese).
[8] 潘少鵬,施家棟,王建中,等. 基于重心側(cè)向擺動的四足機器人爬行步態(tài)優(yōu)化[J]. 機械科學(xué)與技術(shù),2015,34(6):821-826.
PAN S P,SHI J D,WANG J Z,et al. Crawl gait optimization for quadruped robot based on gravity center lateral movement[J]. Mechanical Science and Technology for Aerospace Engineering,2015,34(6):821-826(in Chinese).
[9] CHAE K G,PARK J H. Trajectory optimization with GA and control for quadruped robots[J]. Journal of Mechanical Science & Technology,2009,23(1):114-123.
[10] 田彥濤,孫中波,李宏揚,等. 動態(tài)雙足機器人的控制與優(yōu)化研究進(jìn)展[J]. 自動化學(xué)報,2016,42(8):1142-1157.
TIAN Y T,SUN Z B,LI H Y,et al. A review of optimal and control strategies for dynamic walking bipedal robots[J]. Acta Automatica Sinica,2016,42(8):1142-1157(in Chinese).
[11] 王浩威. 四足機器人跳躍步態(tài)參數(shù)分析及優(yōu)化研究[D]. 哈爾濱:哈爾濱工業(yè)大學(xué),2011.
WANG H W. Parameters analysis and optimization of quadruped robot with bounding gait[D]. Harbin: Harbin Institute of Technology,2011(in Chinese).
[12] MCGHEE R B,F(xiàn)RANK A A. On stability properties of quadruped creeping gaits[J]. Mathematical Biosciences,1968,3(1):331-351.
[13] KALAKRISHNAN M,BUCHLI J,PASTOR P,et al. Learning,planning,and control for quadruped locomotion over challenging terrain[J]. International Journal of Robotics Research,2011,30(2):236-258.
[14] BYL K,SHKOLNIK A,PRENTICE S,et al. Reliable dynamic motions for a stiff quadruped[C]. Experimental Robotics,The Eleventh International Symposium,Athens,Greece,July 13-16,2009:319-328.
[15] 劉穎. 關(guān)于二次規(guī)劃算法的研究[D]. 哈爾濱:哈爾濱師范大學(xué),2012.
LIU Y. Research on the quadratic programming algorithm[D]. Harbin: Harbin Normal University,2012(in Chinese).
[16] 徐拴鋒,楊保華,張篤周,等. 面向非合作目標(biāo)抓捕的機械臂軌跡規(guī)劃方法[J]. 中國空間科學(xué)技術(shù),2014,34(4):8-15.
XU S F,YANG B H,ZHANG D Z,et al. Trajectory planning algorithm for manipulators capturing non-cooperative objects[J]. Chinese Space Science and Technology,2014,34(4):8-15(in Chinese).
[17] 古青波,李昂,趙會光. 空間雙柔性機械臂剛-柔耦合建模及定標(biāo)誤差分析[J]. 中國空間科學(xué)技術(shù),2017,37(1):33-40.
GU Q B,LI A,ZHAO H G. Rigid-flexible coupling modeling and calibration error analysis of the space double flexible manipulators[J]. Chinese Space Science and Technology,2017,37(1):33-40(in Chinese).
[18] 鄭燕紅,鄧湘金,彭兢,等. 基于人工勢場法的月球表層采樣裝置避障規(guī)劃[J]. 中國空間科學(xué)技術(shù),2015,35(6):66-74.
ZHENG Y H,DENG X J,PENG J,et al. Lunar surface sampling device collision avoidance planning based on artificial potential field method[J]. Chinese Space Science and Technology,2015,35(6):66-74(in Chinese).
[19] WESTERVELT E R,GRIZZLE J W,KODITSCHEK D E. Hybrid zero dynamics of planar biped walkers[J]. IEEE Transactions on Automatic Control,2003,48(1):42-56.
[20] 錢慧敏. 非單調(diào)信賴域算法的研究[D]. 西安:西安電子科技大學(xué),2013.
QIAN H M. Research of nonmontone trust-region method[D]. Xi′an: Xidian University,2013(in Chinese).
[21] 王立鵬,王軍政,汪首坤,等. 基于足端軌跡規(guī)劃算法的液壓四足機器人步態(tài)控制策略[J]. 機械工程學(xué)報,2013,49(1):39-44.
WANG L P,WANG Z J,WANG S K,et al. Strategy of foot trajectory generation for hudraulic quadruped robots gait planning[J]. Journal of Mechanical Engineering,2013,49(1):39-44(in Chinese).
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電測與儀表(2015年5期)2015-04-09 11:30:52