雙饋船舶混合軸帶系統(tǒng)變速恒頻裝置研究
2018-05-18 07:23:26趙統(tǒng)向大為
新型工業(yè)化 2018年4期
關(guān)鍵詞:系統(tǒng)
趙統(tǒng),向大為
(同濟(jì)大學(xué)電子與信息工程學(xué)院,上海 201804)
0 引言
隨著溫室效應(yīng)的加劇和化石燃料的日益減少,世界各國對(duì)節(jié)能減排工作更加重視,節(jié)能減排的問題已成為社會(huì)經(jīng)濟(jì)發(fā)展的突出矛盾,對(duì)于經(jīng)濟(jì)正處于高速發(fā)展的發(fā)展中國家,尤其是中國,節(jié)能減排是緩解環(huán)境問題和能源危機(jī)對(duì)經(jīng)濟(jì)發(fā)展的束縛、增強(qiáng)可持續(xù)發(fā)展能力的重要方法。
船舶是全世界大部分的貨物運(yùn)輸?shù)墓ぞ撸斑\(yùn)輸業(yè)是化石燃料消耗和排放的主要行業(yè),其營(yíng)運(yùn)費(fèi)用中燃料費(fèi)用一般占運(yùn)費(fèi)的50%以上[1]。因此,船舶的軸帶系統(tǒng)成為研究熱點(diǎn),它可有效的降低船舶的能源消耗,并提高船舶動(dòng)力系統(tǒng)的可靠性。船舶軸帶系統(tǒng)通過與主軸相連的軸帶電機(jī)利用主機(jī)10%~15%的功率儲(chǔ)備裕量發(fā)電,使主機(jī)運(yùn)行在高能效的最佳狀態(tài),節(jié)約了船載柴油發(fā)電機(jī)的輕質(zhì)柴油消耗,它是節(jié)約燃料的有效途徑之一[2-6]。
軸帶系統(tǒng)從20世紀(jì)70年代開始裝船,被廣泛應(yīng)用在燃油消耗量較大的大、中型集裝箱船以及礦砂船、液貨船等遠(yuǎn)洋和工程船舶上。但是傳統(tǒng)軸帶系統(tǒng)動(dòng)態(tài)性能較差,隨著主機(jī)轉(zhuǎn)速變化,其電能質(zhì)量很不穩(wěn)定,無法長(zhǎng)時(shí)間與船載柴油發(fā)電機(jī)并網(wǎng)發(fā)電,使其節(jié)能減排效果受限。隨著現(xiàn)代電力電子與電力傳動(dòng)控制技術(shù)的發(fā)展,采用電力電子器件的變速恒頻裝置可以實(shí)現(xiàn)恒頻恒壓發(fā)電,采用矢量控制也可使有功、無功功率解耦控制、靈活調(diào)節(jié),使軸帶系統(tǒng)發(fā)揮最大的效能。因此,變速恒頻裝置受到了廣泛的關(guān)注。
本文將采用矢量控制(定子電壓定向)的雙饋混合軸帶系統(tǒng)的設(shè)計(jì)和實(shí)現(xiàn)作為研究重點(diǎn)。在第1部分對(duì)矢量控制(定子電壓定向)的原理進(jìn)行分析;第2部分,利用Matlab/Simulink搭建雙饋混合軸帶系統(tǒng)的模型,驗(yàn)證控制算法和系統(tǒng)參數(shù)[7-9];第3部分,利用仿真參數(shù)搭建雙饋混合軸帶系統(tǒng)變速恒頻裝置,記錄系統(tǒng)在不同工況下的實(shí)驗(yàn)結(jié)果。第4部分,分析仿真及實(shí)驗(yàn)數(shù)據(jù),得出結(jié)論。
1 基于定子電壓定向的矢量控制策略
如圖1所示,在雙饋混合軸帶系統(tǒng)中,通常采用定子電壓定向的矢量控制[10-16],將d軸與電網(wǎng)電壓矢量對(duì)齊,因此在d軸和q軸的定子電壓為:


式中, fs是發(fā)電機(jī)的定子頻率(也就是電網(wǎng)電壓頻率)。定子電壓矢量角 θs是相對(duì)于定子坐標(biāo)系的角度。
發(fā)電機(jī)轉(zhuǎn)子角速度為,轉(zhuǎn)子位置角 θr是轉(zhuǎn)子位置相對(duì)定子坐標(biāo)系的角度。定子電壓矢量和轉(zhuǎn)子電壓矢量之間的角度差為轉(zhuǎn)差角,定義為:


圖1 定子電壓定向控制的雙饋電機(jī)空間矢量圖Fig.1 Stator voltage oriented doubly-fed motor space vector
因?yàn)殡p饋軸帶電機(jī)運(yùn)行在單位功率因數(shù)下,定子電流矢量和→對(duì)齊,但是方向相反(雙饋軸帶電機(jī)此時(shí)工作在發(fā)電模式)。轉(zhuǎn)子電壓矢量和電流矢量通過轉(zhuǎn)子側(cè)變流器進(jìn)行控制。轉(zhuǎn)子電壓矢量和電流矢量可沿著dq軸分解為兩個(gè)分量,即分解為υdr和 υqr,分解為 idr和 iqr,這些dq軸分量可通過轉(zhuǎn)子側(cè)變流器獨(dú)立進(jìn)行控制。
雙饋混合軸帶系統(tǒng)可通過電磁轉(zhuǎn)矩控制來實(shí)現(xiàn)轉(zhuǎn)速控制或有功功率控制。和其他軸帶系統(tǒng)相比,可以通過轉(zhuǎn)子側(cè)變流器控制雙饋電機(jī)電磁轉(zhuǎn)矩 Te、定子有功功率和無功功率 Qs。
雙饋軸帶電機(jī)的dq軸轉(zhuǎn)子電流與定子有功功率 Ps和無功功率的關(guān)系可表示為式4:

上式表明,在給定定子電壓后,定子有功功率和無功功率可通過dq軸轉(zhuǎn)子電流來控制。
2 仿真研究
為了驗(yàn)證控制策略和主回路結(jié)構(gòu)及參數(shù)的有效性,采用Matlab/Simulink搭建雙饋混合軸帶系統(tǒng)模型,并分析電機(jī)運(yùn)行在軸帶發(fā)電和并車推進(jìn)工況下的運(yùn)行狀態(tài)。
2.1 雙饋混合軸帶系統(tǒng)仿真
為驗(yàn)證本文理論分析和系統(tǒng)建模的準(zhǔn)確性,利用Matlab/Simulink搭建雙饋混合軸帶系統(tǒng)仿真模型結(jié)構(gòu)如圖2所示,仿真采用30 kW的雙饋軸帶電機(jī),其參數(shù)如表1所示,仿真系統(tǒng)參數(shù)如表2所示。

圖2 雙饋混合軸帶系統(tǒng)仿真模型Fig.2 Simulation structure of doubly-fed shaft system

表1 雙饋電機(jī)仿真模型參數(shù)Table1 Parameters of simulation model for doubly-fed motor

表2 雙饋混合軸帶系統(tǒng)仿真模型參數(shù)Table2 Parameters of simulation model for Doubly-fed shaft system
通過設(shè)置不同的雙饋電機(jī)轉(zhuǎn)速指令和有功、無功功率指令,使雙饋混合軸帶系統(tǒng)工作在的不同的工況下,記錄并分析仿真結(jié)果。
2.2 雙饋混合軸帶系統(tǒng)仿真分析
系統(tǒng)仿真工況分為兩部分,一是并網(wǎng)后改變雙饋軸帶電機(jī)轉(zhuǎn)速,觀察電機(jī)輸出(有功、無功功率和定子電壓、電流等)的變化;二是在固定轉(zhuǎn)速,進(jìn)行突然改變有功、無功功率的實(shí)驗(yàn),觀察電機(jī)輸出的變化。以下仿真均忽略電機(jī)啟動(dòng)過程中各量的暫態(tài)過程,只考慮電機(jī)穩(wěn)態(tài)運(yùn)行時(shí)各量在不同工況下的變化。
2.2.1 變速恒頻運(yùn)行工況仿真
仿真給定電網(wǎng)電壓400 V,電網(wǎng)頻率50 Hz,電機(jī)處于空載運(yùn)行狀態(tài)。電機(jī)初始轉(zhuǎn)速為1200 r/min(次同步),在1.2 s時(shí),將轉(zhuǎn)速給定調(diào)為1800 r/min(超同步)電壓電流波形如下:

圖3 轉(zhuǎn)速變化時(shí)電機(jī)波形Fig.3 Waveforms of speed changing
由圖3可知,電機(jī)空載運(yùn)行時(shí),定子電流幅值幾乎為0 A。1.2 s時(shí),電機(jī)加速,定子電流出現(xiàn)小幅波動(dòng),在1.22 s時(shí),定子電流幅值又恢復(fù)為0 A。在電機(jī)加速過程中,定子電壓的幅值、頻率和相位始終穩(wěn)定;由于1200 r/min和1800 r/min電機(jī)轉(zhuǎn)差率絕對(duì)值相等,符號(hào)相反,所以加速后的轉(zhuǎn)子電流幅值不變,相位反相,實(shí)現(xiàn)了電機(jī)在變速過程中恒壓恒頻發(fā)電。
2.2.2 負(fù)載突變工況仿真
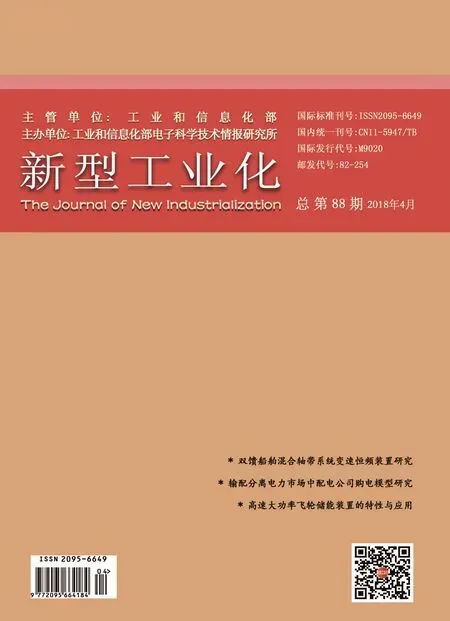
設(shè)定仿真模型電機(jī)運(yùn)行轉(zhuǎn)速為1800 r/min,在1.4 s時(shí),給定電機(jī)18 kW有功功率指令;在1.6 s時(shí),給定電機(jī)6 kVar無功功率指令。觀察電機(jī)定子電壓、電流和轉(zhuǎn)子電流變化情況。

圖4 加載有功功率時(shí)電機(jī)波形Fig.4 Waveforms of loading active power
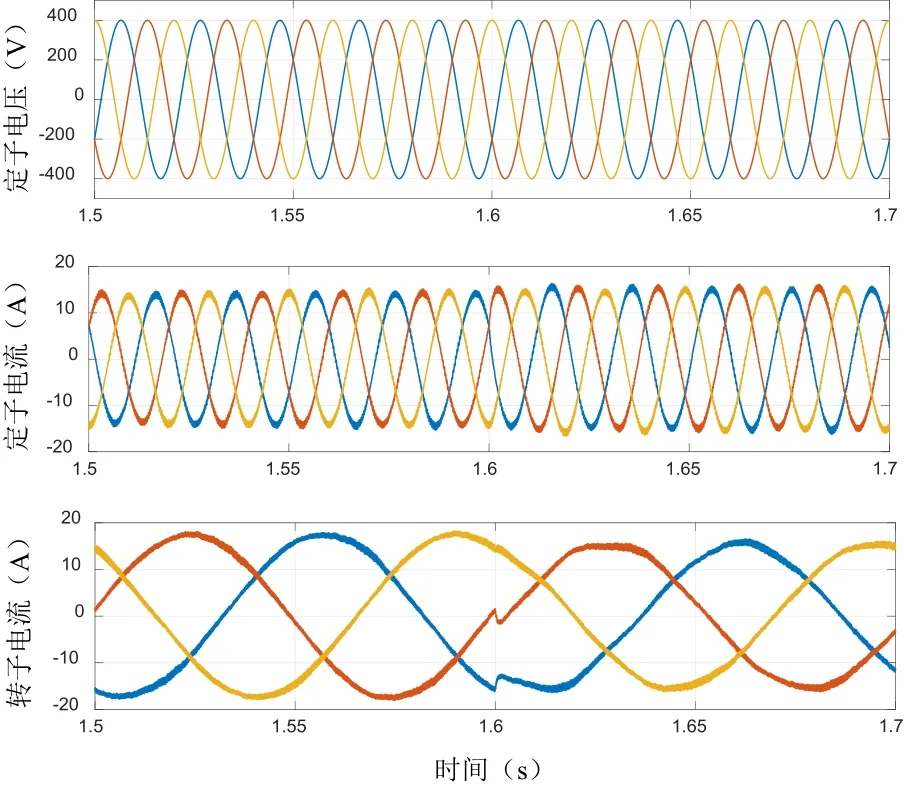
圖5 加載無功功率時(shí)電機(jī)波形Fig.5 Waveforms of loading reactive power
如圖4所示,在1.4 s時(shí),給定電機(jī)18 kW的有功功率指令,加載過程中,定子電壓相位、頻率和幅值無明顯波動(dòng);轉(zhuǎn)子電流頻率不變,幅值增大,相位延后,最終保持穩(wěn)定。
如圖5所示,在1.6 s時(shí),給定電機(jī)6 kVar無功功率指令,加載過程中,定子電壓相位、頻率和幅值無明顯波動(dòng);轉(zhuǎn)子電流頻率不變,幅值增大,相位超前,最終保持穩(wěn)定。
綜上,實(shí)現(xiàn)了在電機(jī)負(fù)載(有功、無功功率)突變時(shí),電機(jī)實(shí)現(xiàn)恒壓恒頻發(fā)電。
3 實(shí)驗(yàn)研究
3.1 實(shí)驗(yàn)平臺(tái)搭建
3.1.1 系統(tǒng)結(jié)構(gòu)設(shè)計(jì)
雙饋混合軸帶系統(tǒng)實(shí)驗(yàn)臺(tái)結(jié)構(gòu)如圖6所示,主電路部分由雙饋軸帶電機(jī)、變速恒頻裝置、并網(wǎng)接觸器、原動(dòng)機(jī)(感應(yīng)電機(jī))、變頻器和EMI濾波器組成,各個(gè)主要設(shè)備的參數(shù)如表3所示。

圖6 雙饋混合軸帶系統(tǒng)實(shí)驗(yàn)臺(tái)結(jié)構(gòu)圖Fig.6 Structure of doubly-fed shaft system

表3 雙饋混合軸帶實(shí)驗(yàn)系統(tǒng)主要參數(shù)Table3 Parameters of the Doubly-fed shaft test system
3.1.2 硬件設(shè)計(jì)
變速恒頻裝置主要由機(jī)側(cè)變流器、網(wǎng)側(cè)變流器、控制板(DSP28335)、采樣板、并網(wǎng)接觸器和AC電抗器組成。采樣板采集電壓、電流信號(hào)后送到控制板,控制板經(jīng)過計(jì)算后,輸出控制信號(hào),從而控制雙饋混合軸帶系統(tǒng)的運(yùn)行。
網(wǎng)側(cè)變流器采用有源前端(AFE),可實(shí)現(xiàn)能量的雙向流動(dòng),規(guī)格為400 V/15 kW,實(shí)現(xiàn)單位功率因數(shù)控制和直流母線電壓控制。
機(jī)側(cè)變流器主板PCB的設(shè)計(jì)如圖7所示,它集成了IGBT模塊、光電隔離接口電路、IGBT驅(qū)動(dòng)板直流電容和預(yù)充電回路等結(jié)構(gòu)。接口電路將控制板輸出的控制信號(hào)轉(zhuǎn)化成IGBT的驅(qū)動(dòng)信號(hào)(光電隔離),然后通過驅(qū)動(dòng)板驅(qū)動(dòng)IGBT將交流電逆變成所需的三相交流電壓。變速恒頻裝置如圖8所示,雙饋混合軸帶系統(tǒng)實(shí)驗(yàn)臺(tái)如圖9所示。
AC電抗器用來改善網(wǎng)側(cè)電流波形,額定電壓400 V,額定電流35 A,電感值為4.18 mH。

圖7 機(jī)側(cè)變流器主板PCB設(shè)計(jì)Fig.7 PCB design of the motherboard for the rotor side converter

圖8 變速恒頻裝置Fig.8 Variable-speed constant-frequency equipment

圖9 雙饋軸帶系統(tǒng)實(shí)驗(yàn)臺(tái)Fig.9 Doubly-fed shaft test system
3.1.3 軟件設(shè)計(jì)
控制器選用TI公司的DSP28335,在CCS6.0環(huán)境里實(shí)現(xiàn)C語言編程,程序主要分為主程序、定時(shí)中斷程序(PWM波控制、ADC采樣和光電碼盤采樣等)兩部分。主程序流程圖如圖10所示,其主體為無限循環(huán)檢測(cè),不斷檢測(cè)變流器各部分工作狀態(tài),主要實(shí)現(xiàn)系統(tǒng)流程的執(zhí)行和故障保護(hù)(過壓、過流)的功能。

圖10 主程序流程圖Fig.10 Flow diagram of the main program
定時(shí)中斷程序在主程序無限循環(huán)檢測(cè)里,該程序主要完成電壓電流采樣和AD轉(zhuǎn)換、電機(jī)光碼測(cè)速、控制機(jī)側(cè)變流器實(shí)現(xiàn)電網(wǎng)電壓跟蹤并網(wǎng)以及變速恒頻發(fā)電下的有功、無功功率解耦控制的功能,實(shí)現(xiàn)定子電壓定向矢量控制。
3.2 實(shí)驗(yàn)驗(yàn)證
為了驗(yàn)證雙饋混合軸帶系統(tǒng)變速恒頻裝置的控制和硬件的有效性,進(jìn)行空載并網(wǎng)(830 r/min)、軸帶發(fā)電(800 r/min、880 r/min)和并車推進(jìn)工況(880 r/min、1150 r/min)下的實(shí)驗(yàn),實(shí)驗(yàn)結(jié)果及分析如下所述。
3.2.1 空載并網(wǎng)
首先,斷開雙饋軸帶電機(jī)定子側(cè)與電網(wǎng)之間的并網(wǎng)接觸器,控制電機(jī)運(yùn)行在830r/min;然后通過機(jī)側(cè)變流器勵(lì)磁,使電機(jī)定子側(cè)電壓幅值、相位和頻率與電網(wǎng)電壓完全一致;最后,閉合并網(wǎng)接觸器,完成并網(wǎng)。

圖11 空載并網(wǎng)波形Fig.11 Waveforms of motor hooked up to the grid without load
并網(wǎng)過程中電機(jī)定子電壓、電流和轉(zhuǎn)子電流波形如圖11所示,并網(wǎng)過程中,定子電壓幅值、相位和頻率保持穩(wěn)定,并網(wǎng)后定子電壓更加平滑;轉(zhuǎn)子電流受到?jīng)_擊,在一個(gè)周波內(nèi)又恢復(fù)穩(wěn)定;定子電流有小幅振蕩,但很快恢復(fù)了穩(wěn)定。綜上,并網(wǎng)沖擊不大,并網(wǎng)完成。
3.2.2 軸帶發(fā)電
雙饋軸帶電機(jī)與電網(wǎng)實(shí)現(xiàn)并網(wǎng)后,進(jìn)行軸帶發(fā)電實(shí)驗(yàn)。在轉(zhuǎn)速為800 r/min時(shí),給出P= 0 Kw、Q=1.6 kVar功率的指令,波形如圖12;在轉(zhuǎn)速為880 r/min時(shí),給出P= 4.3 kW、Q=0 kVar的功率指令,波形如圖13。
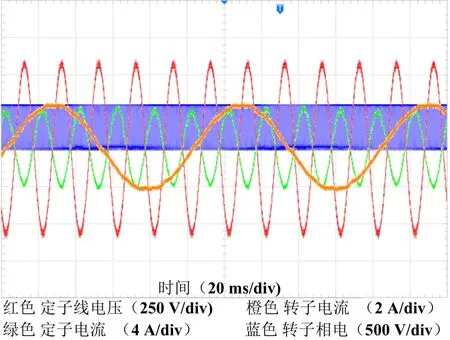
圖12 轉(zhuǎn)速800 r/min時(shí),P=0 kW,Q= 1.6 kVarFig.12 Speed at 800 r/min, P= 0 kW, Q=1.6 kVar

圖13 轉(zhuǎn)速880 r/min時(shí),P= 4.3 kW,Q= 0 kVarFig.13 Speed at 880 r/min, P= 4.3 kW, Q=0 kVar
圖12、13對(duì)比可知,電機(jī)在不同轉(zhuǎn)速、不同功率指令工況下,定子電壓頻率、幅值和相位均沒有明顯變化,定子電流的相位和幅值受有功、無功功率的影響;轉(zhuǎn)速變化時(shí),轉(zhuǎn)子電流的頻率隨隨轉(zhuǎn)差頻率同步變化,以確保定子電壓頻率始終為50 Hz。綜上,在雙饋軸帶電機(jī)轉(zhuǎn)速改變過程中,雙饋混合軸帶系統(tǒng)實(shí)驗(yàn)臺(tái)實(shí)現(xiàn)了恒頻恒壓發(fā)電。
3.2.3 并車推進(jìn)
完成軸帶發(fā)電實(shí)驗(yàn)后,進(jìn)行并車推進(jìn)實(shí)驗(yàn)。電機(jī)次同步運(yùn)行時(shí),電機(jī)轉(zhuǎn)速為880 r/min,給出P=-4.3 kW、Q= 0 kVar的功率指令,波形如圖14。電機(jī)超同步運(yùn)行時(shí),電機(jī)轉(zhuǎn)速為1150 r/min,給出P=-5.7 kW、Q= 0 kVar的功率指令,波形如圖15。
圖14 轉(zhuǎn)速880 r/min時(shí),P= -4.3 kW,Q= 0 kVarFig.14 Speed at 880 r/min, P= -4.3 kW, Q=0 kVar

圖15 轉(zhuǎn)速1150 r/min時(shí),P= -5.7 kW, Q= 0 kVarFig.15 Speed at 1150 r/min, P= -5.7 kW, Q=0 kVar
由圖14、15可知,電機(jī)并車推進(jìn)工況運(yùn)行穩(wěn)定,電機(jī)轉(zhuǎn)速變化時(shí)定子電壓頻率、幅值和相位均無明顯變化。電流轉(zhuǎn)子電流頻率隨轉(zhuǎn)差頻率同步變化,以確保定子電壓頻率始終為50 Hz。雙饋混合軸帶系統(tǒng)的并車推進(jìn)實(shí)驗(yàn)完成。
4 結(jié)論
為研發(fā)雙饋混合軸帶系統(tǒng)變速恒頻裝置,本文首先利用Matlab/Simulink搭建了一個(gè)30 kW雙饋混合軸帶系統(tǒng)模型,驗(yàn)證了算法和主回路參數(shù)設(shè)計(jì)的合理性;然后根據(jù)仿真參數(shù)搭建了一套7.5 kW雙饋混合軸帶系統(tǒng)變速恒頻裝置;最后通過軸帶發(fā)電(有功、無功功率)和并車推進(jìn)實(shí)驗(yàn),驗(yàn)證了變速恒頻裝置運(yùn)行的穩(wěn)定性和可靠性。根據(jù)仿真及實(shí)驗(yàn)結(jié)果,可得出如下結(jié)論:
1) 雙饋混合軸帶系統(tǒng)矢量控制(定子電壓定向)效果好,并網(wǎng)沖擊小,可以完成與船載電網(wǎng)(柴油發(fā)電機(jī))并網(wǎng);
2) 雙饋混合軸帶系統(tǒng)可實(shí)現(xiàn)軸帶發(fā)電(有功、無功功率)和并車推進(jìn)兩種工況;
3) 雙饋混合軸帶系統(tǒng)在電機(jī)轉(zhuǎn)速變化過程中,定子電壓頻率、幅值和相位均無明顯變化,可實(shí)現(xiàn)恒壓恒頻發(fā)電。
參考文獻(xiàn)
[1] 胡捷. 基于SPWM逆變器的軸帶發(fā)電機(jī)系統(tǒng)研究[D]. 上海: 上海海事大學(xué), 2006.HU Jie. Research on the shaft system based on a SPWM modulated inverter [D]. Shanghai: Shanghai Maritime University,2006.
[2] SARIGIANNIDISA, KLADASA, CHATZINIKOLAOUE, et al. High efficiency Shaft Generator drive system design for Ro-Ro trailerpassenger ship application [C]//International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles. IEEE, 2015:1-6.
[3] HANSENJF, WENDTF. History and State of the Art in Commercial Electric Ship Propulsion, Integrated Power Systems, and Future Trends[J]. Proceedings of the IEEE, 2015, 103(12):2229-2242.
[4] 李亮, 劉以建, 江華, 等. 基于全控型PWM變流器的船舶軸帶發(fā)電機(jī)系統(tǒng)研究 [J]. 艦船科學(xué)技術(shù), 2009, 31(7): 51-55.LI Liang, LIU Yi-jian, JIANG Hua, et al. The research of a new shaft generator system on the ship based on the whole controlled PWM rectifier [J]. Ship Science and Technology, 2009, 31(7): 51-5
[5] 孟永奇, 李保來, 蘭建軍.船舶軸帶發(fā)電-電動(dòng)系統(tǒng)的原理及控制研究 [J]. 船電技術(shù), 2011, 31(8): 35-44.MENG Yong-qi, LI Bao-lai, LAN Jian-jun. Principle and control of ship’s shaft-driven generator-motor system [J]. Ship Electric Technology, 2011, 31(8): 35-44.
[6] MULLERS, DEIEKEM, DEDONEKER RW.Doubly-fed induction generator systems for wind turbines [J].IEEE Industry Application Magazine, 2002, 8(3): 26-33.
[7] 王傳東,向大為,王騰.雙饋風(fēng)機(jī)轉(zhuǎn)子側(cè)變流器電熱特性分析 [J]. 新型工業(yè)化,2015,5(10): 21-26.WANG Chuan-dong, XIANG Da-wei, WANG Teng. Analysis of Electric and Thermal Characteristics of Rotor-Side Converter of the Doubly-fed Induction Generator System[J]. The Journal of New Industrialization, 2015, 5(10): 21-26.
[8] 谷雅瓊,于惠鈞,鄧棟,等.基于MATLAB的風(fēng)力發(fā)電機(jī)組低電壓穿越仿真 [J]. 新型工業(yè)化,2014,4(10): 18-22.GU Ya-qiong, YU Hui-jun, DENG Dong, et al.Wind Turbine Generator Low Voltage Ride Through Based on MATLAB [J].The Journal of New Industrialization,2014,4(10):18-22.
[9] 高海波,陳明昭,陳輝. 船舶軸帶發(fā)電機(jī)系統(tǒng)的仿真設(shè)計(jì)與建模 [J]. 系統(tǒng)仿真學(xué)報(bào), 2002,14(6): 806-808.GAO Hai-bo,CHEN Ming-zhao,CHEN Hui. Design and modeling of the ship shaft generator simulator[J]. Journal of System Simulation,2002,14(6): 806-808.
[10] 王龍,艾鋼,劉赟. 雙饋式船舶混合軸帶系統(tǒng)多模式平滑切換控制技術(shù)研究 [J]. 新型工業(yè)化, 2017, 7(9): 47-52.WANG Long, AI Gang, LIU Yun. Mode Switching Control Technique of Ship Shaft Generator System with Doubly-fed Induction Machine[J]. The Journal of New Industrialization, 2017, 7(9): 47-52.
[11] 薛士龍. 船舶電力系統(tǒng)及其自動(dòng)控制 [M]. 北京: 電子工業(yè)出版社,2012: 25-27.XUE Shi-long. Ship power system and automatic control [M]. Beijing: Electronics Industry Press,2012: 25-27.
[12] WU B,LANG Y,KOURO S,et al. Power Conversion and Control of Wind Energy Systems[M]. IEEE Press, Wiley, 2011.
[13] LIU C,BLAABJERG F,CHEN W,et al. Stator current harmonic control with resonant controller for doubly-fed induction generator[J].IEEE Transactions on Power Electronics,2012,27(7): 3207-3220.
[14] 馮玉龍. 船舶軸帶雙饋機(jī)組變速恒頻控制器設(shè)計(jì)與系統(tǒng)仿真研究 [D]. 上海: 上海船用柴油機(jī)研究所,2014.FENG Yu-long. Research on system simulation and design for variable Speed and fixed frequency controller of doubly-fed shaft generator[D].Shanghai: Shanghai Marine Diesel Engine Research Institute,2014.
[15] 周苗升,孫旭東,柴建云,等.雙饋異步軸帶發(fā)電機(jī)的控制與研究 [J]. 清華大學(xué)學(xué)報(bào)(自然科學(xué)版),2008,48(4): 465-468.ZHOU Miao-sheng,SUN Xu-dong,CHAI Jian-yun, et al. Research on doubly-fed induction ship generator[J]. Journal of Tsinghua University(Natural Science Edition),2008,48(4): 465-468.
[16] BATLLE C, CEREZO AD, ORTEGA R. A Stator Voltage Oriented PI Controller For The Doubly-Fed Induction Machine[C]// American Control Conference. OAI, 2007:5438-5443.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32