微光探測器時序設計研究
2018-05-17 09:38:13王鵬劉琦徐磊
航天返回與遙感 2018年2期
王鵬 劉琦 徐磊
?
微光探測器時序設計研究
王鵬 劉琦 徐磊
(北京空間機電研究所,北京 100094)
隨著科學技術的不斷發展,以EMCCD作為微光探測器的成像系統得到了廣泛應用。微光相機成像系統中應用了某款EMCCD作為微光通道的探測器,文章結合這款探測器的結構特點,對EMCCD的時序設計進行研究。通過對微光相機成像系統的介紹,并比較不同EMCCD時序設計方案的基礎上,提出了微光探測器的時序控制和高壓信號控制等關鍵時序設計方案。通過設計、測試和驗證,證明作為微光相機影響成像品質的重要因素,EMCCD時序設計邏輯正確,為成像系統的圖像品質提供了基礎保障。
時序設計 高壓信號 電子倍增電荷耦合器件 微光相機 航天遙感
0引言
隨著微光探測技術的不斷發展,微弱光條件下的探測技術在航天領域得到了較為廣泛的應用。作為新一代微光探測器件電子倍增CCD(Electron-Multiplying CCD,EMCCD),也逐漸應用在遙感成像系統中。與傳統的CCD器件相比,它在覆蓋可見光光譜范圍的同時,在低照度的條件下具有更為突出的目標識別能力[1]。因此,其在低照度目標偵查、夜視成像甚至單光子檢測等領域的應用具有一定優勢[2-5]。
目前,國內對于微光探測器的研究主要集中在兩大廠商美國的TI公司和英國的E2V公司的不同系列EMCCD芯片。基于微光探測器的微光相機研究,更多的集中在原理驗證和工程樣機上。偏重于微光探測技術的理論研究,對于結合應用的技術細節研究不足[6-8]。本文結合某微光相機實現從1/4月光光照條件到晨昏的大動態范圍探測應用需求,對微光探測器時序設計進行研究。結合EMCCD的結構特點以及時序信號和倍增信號時序設計方案研究,提出了微光探測器時序設計是影響系統圖像品質的基礎因素,給出了倍增時序相位控制方法并進行工程驗證,后續實現了通過微光探測器時序設計與控制提升遙感圖像品質的在軌應用。
1 微光相機成像系統
1.1 基于EMCCD的成像系統
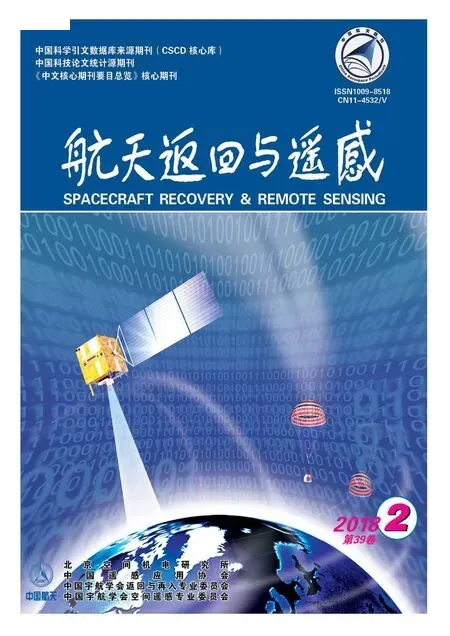
相機電子學成像系統通常包含探測器及驅動電路、信息處理器、管理控制器等電路及單機設備。某微光相機的成像系統主要由微光探測器、高亮探測器、相機主體電路和信息處理器等組成,如圖1所示。4臺相同的相機主體通過視場拼接實現幾千千米的地面覆蓋。每臺相機在焦面上進行分光:一路為微光通道,應用EMCCD實現微光探測;另一路為高亮通道,采用線陣CCD器件實現白天高亮度探測。
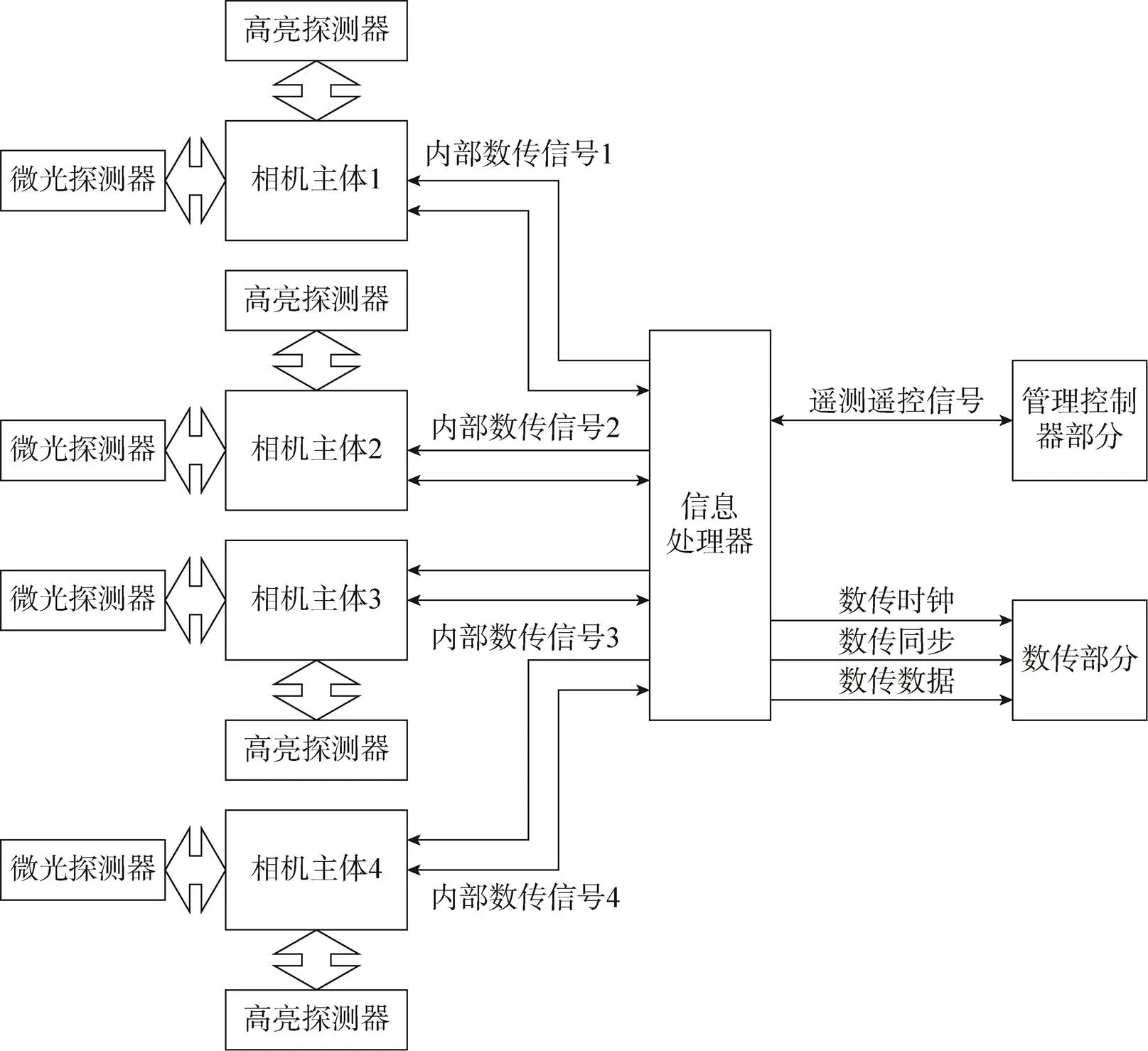
圖1 微光相機成像系統
每個相機主體部分應用一片FPGA器件,用于產生2種CCD的時序信號以及AD的配置信號等,并將輸出的圖像數據通過內部數傳接口傳遞給信息處理器。信息處理器將4個相機主體的圖像數據進行編排,通過數傳接口傳遞給數傳分系統,同時接收管理控制器的遙測遙控指令,對相機的工作狀態進行調整,并通過內部數傳接口傳遞給相機主體相應的指令信息。
在這個成像系統中,EMCCD在時序信號和高壓信號的作用下進行光電轉換和電荷轉移并輸出模擬信號,經過模數轉換以后得到圖像數據。對于其電路設計方面,需要考慮驅動設計方面不同偏置電壓和驅動脈沖信號的驅動能力。對于其時序設計方面,在兼顧水平轉移和垂直轉移的時序控制的同時,還要考慮高壓信號的相位控制和幅值控制等。
1.2 EMCCD的結構
EMCCD包括成像區、存儲區、水平轉移、倍增寄存器和放大輸出幾個部分,如圖2所示。與傳統CCD的主要區別是在水平轉移寄存器后面增加了一級倍增寄存器,使電荷數量達到多倍的增加,從而實現對微弱光信號的探測[9]。EMCCD的結構特點直接決定了其驅動設計和時序設計需要考慮驅動能力和時序相位控制等因素。除了一般CCD設計需要考慮的轉移信號的驅動設計以外,在電路設計上需要進行倍增信號的高壓運算放大器設計得到高壓倍增信號,并通過時序設計進行倍增信號的時序相位控制,以及其與水平轉移時序信號的相位關系設計進行時序匹配。對于高壓倍增信號相位和幅值的結合控制給時序設計增加了不小的難度,同時倍增信號和多個水平轉移信號的相位匹配也增加了相位控制的設計難度。由于倍增信號的幅值與相位控制直接影響輸出的模擬信號質量,且電荷轉移效率也與倍增信號的幅值和時序相位密切相關[10]。那么就需要設計倍增信號和水平轉移信號的時序以及相位控制方法,以解決時序設計匹配的難題。
EMCCD的結構如圖2所示,成像區是感光部分,負責將光信號轉換為電信號;存儲區表面覆蓋一層金屬材料使其不感光,用來存儲成像區光電轉換之后產生的電荷;水平轉移部分將成像區的電荷按照時序信號的設計轉移到寄存器中;水平轉移寄存器之后是倍增寄存器,電荷進入倍增寄存器后,在高壓差作用下加速運動,發生雪崩倍增效應,激發出新的電子,實現電子倍增效果;最后經過放大輸出部分得到對應幅值的模擬信號[11]。在倍增過程中,每一級的增益很小,只有約1.01~1.015,但經過級倍增后,其倍增增益=(1+),可達到指數級增長[12]。電荷經過這樣的轉移過程,就實現了EMCCD的電子倍增過程,這也是微光探測器EMCCD在結構上區別于其他CCD的特殊之處。
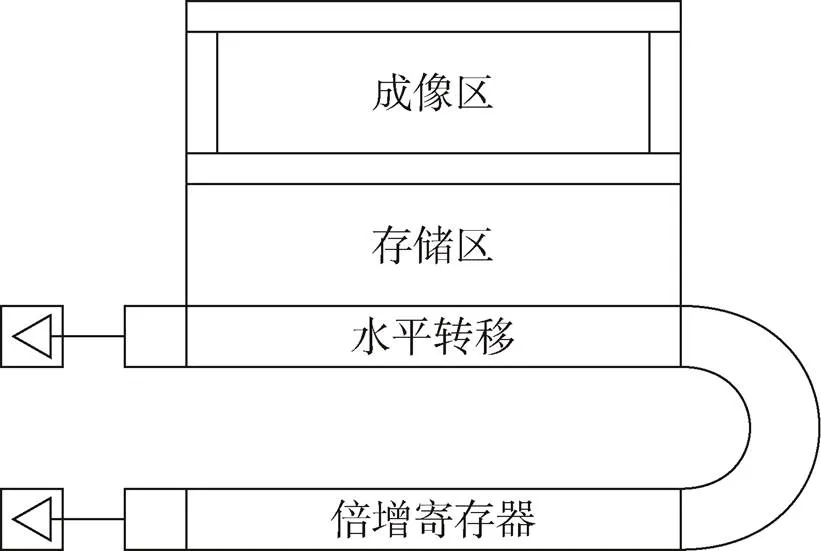
圖2 EMCCD結構示意
1.3 EMCCD的時序信號
EMCCD的整個電荷轉移過程都由時序信號控制(如圖3所示),而且EMCCD的時序設計與驅動設計密切相關。那么在硬件電路確定驅動設計定型的條件下,時序設計就成了電荷轉移控制的關鍵部分。其時序信號主要包括垂直轉移信號,水平轉移信號,高壓信號和清倒信號。
作為EMCCD時序設計的關鍵部分,水平轉移時序與倍增時序控制必不可少。EMCCD的水平轉移部分有3個電極Φ1、Φ2、Φ3,其倍增部分則在Φ1和Φ2之間增加了直流偏置Φdc,并由高壓電極Φ2HV替代Φ2[13]。電荷從電極Φdc轉移到Φ2HV時,由兩個電極的電勢差形成強電場,形成雪崩效應,實現了電子倍增效應。這個過程一方面要控制時序信號RΦ1、RΦ2、RΦ3之間的相位關系以保證電荷的水平轉移效率,另一方面還要調整RΦ1、RΦ3和高壓信號RΦ2HV的相位關系并控制高壓信號的幅值來實現電荷的倍增過程,而且高壓信號的特性也直接決定了電子倍增過程的轉移效率和EMCCD的使用壽命。
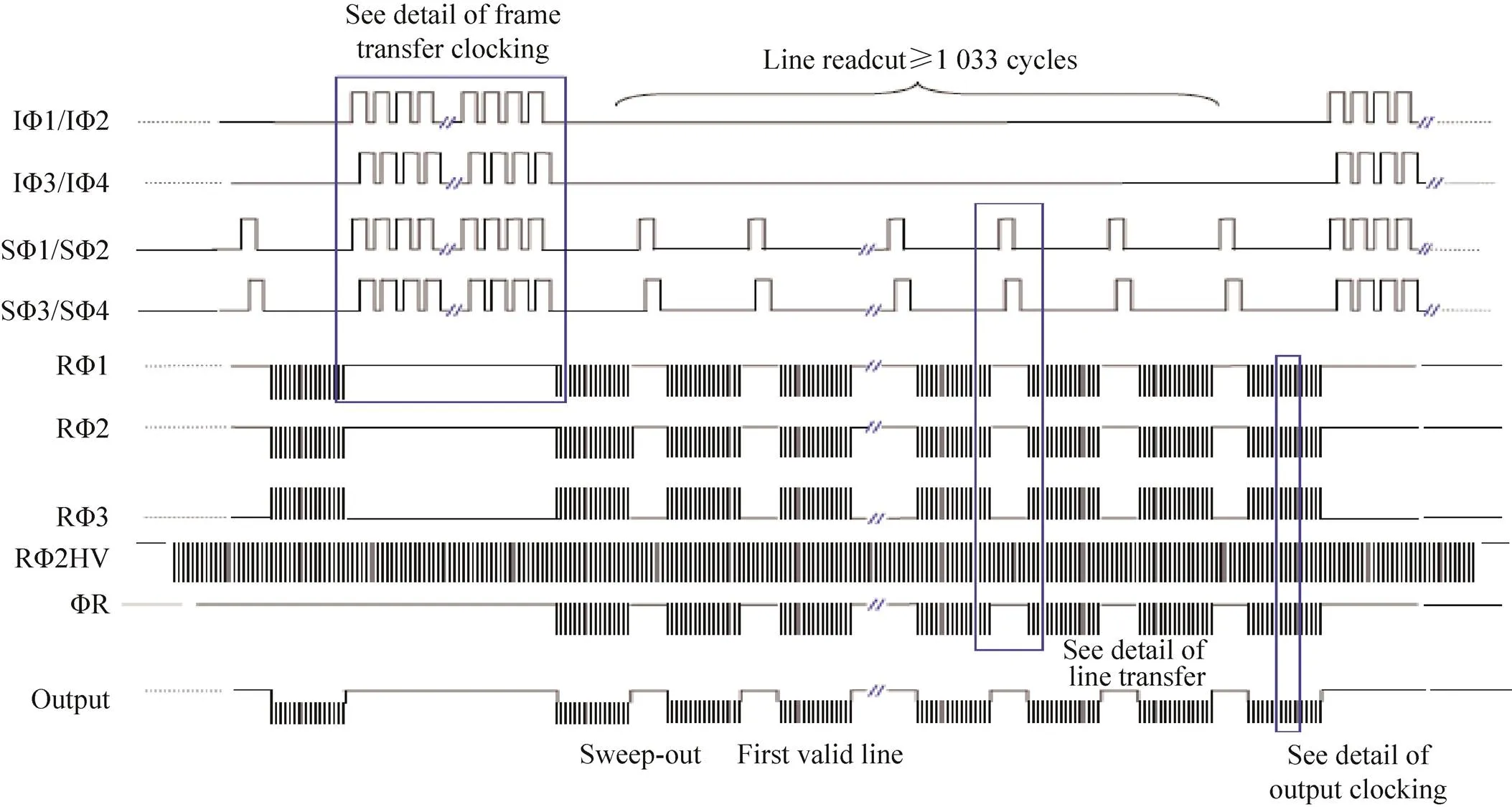
圖3 EMCCD時序信號示意
2 微光探測器時序設計
2.1 EMCCD的時序方案
EMCCD的時序設計主要包括轉移時序信號設計和高壓信號設計兩個部分,轉移時序信號和高壓信號共同作用,實現EMCCD的驅動,完成電荷從成像區到存儲區,從存儲區到水平寄存器,從水平寄存器到倍增寄存器的轉移過程。通常轉移時序設計采用幀轉移時序設計,而高壓信號可以選擇方波或者正弦波設計。
典型的幀轉移時序方案中,一個幀周期包含了垂直轉移和水平轉移兩個過程(如圖4所示)。
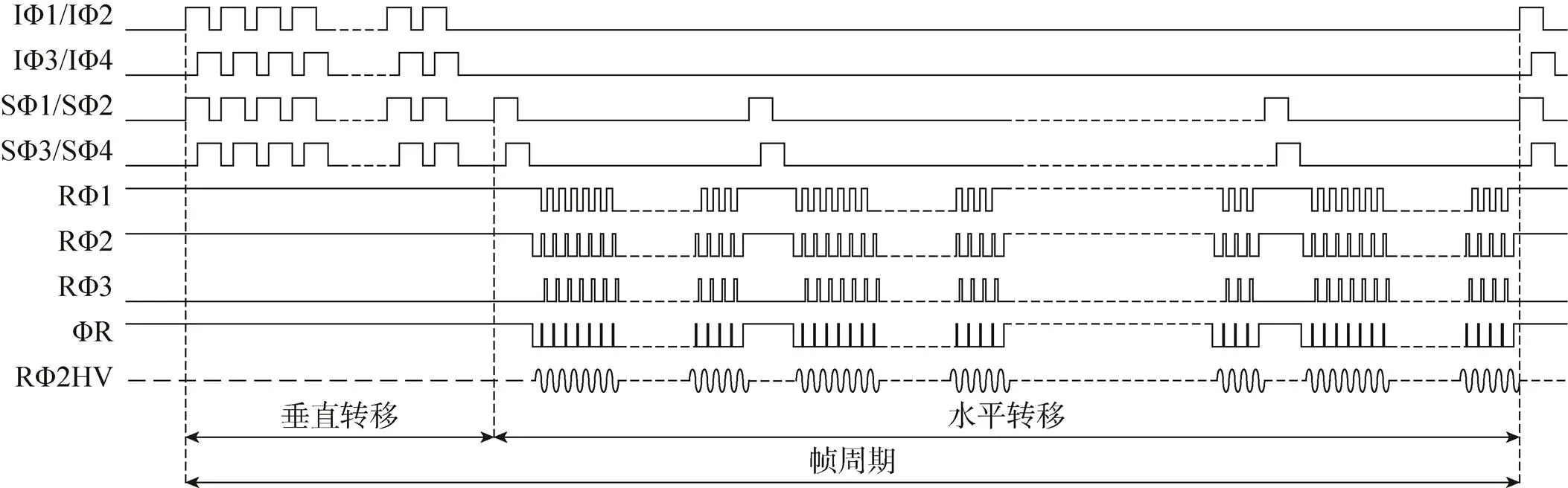
圖4 幀轉移時序方案
這種方案幀周期固定,積分時間固定不可調整,不能適應大動態范圍探測積分時間調整的應用要求。而且水平轉移過程會占用較長的時間,在成像區域積累的電荷會影響到相當長一段時間的圖像品質,不滿足微光探測成像品質的要求。
在對比典型時序設計的基礎上,為了減少成像區域積累電荷對圖像品質的影響,微光相機的時序方案加入了清除電荷部分。將時序設計中增加清除電荷轉移時序,用于將多余電荷轉移清除。為了解決積分時間控制問題,同時避免時序沖突,在某微光相機中設計了清除電荷部分放在轉移過程前面,即清除與部分輸出的時序方案。在實現積分時間控制的基礎上,有效降低無用電荷對圖像品質的影響。
對于高壓信號的選擇,則先來比較一下方波和正弦波的特點。方波具有較為平坦的峰值區域,但上升過程和下降過程不對稱且時間太短,這會對器件的工作壽命帶來影響[14]。正弦波具有緩變性和對稱性的特點[15],上升過程和下降過程對稱但時間相對方波較長。考慮到EMCCD的工作時間長和設計壽命具有一定要求,選取正弦波作為高壓信號,并應用DA芯片和放大電路配合,進行高壓信號的時序設計,實現其相位和幅值控制[16]。
清除與部分輸出的時序方案(如圖5所示)整個幀周期包含清除部分、積分部分、垂直轉移、部分水平轉移和清倒部分,來完成電荷的清除和轉移等過程。
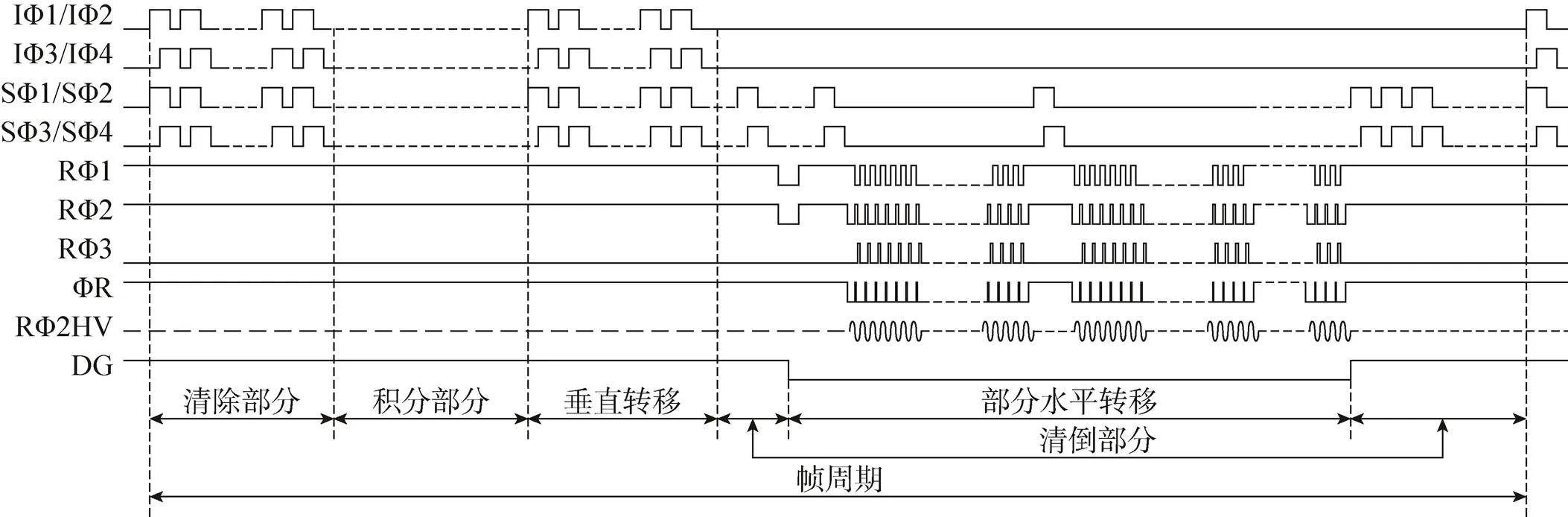
圖5 清除與部分輸出時序方案
清除部分的設計主要是應用IΦ1-IΦ4和SΦ1-SΦ4信號,將開始積分之前成像區的多余電荷進行轉移清除,以消除非積分時間內成像區的殘余電荷累積。清除部分的時序信號數量與器件的有效行數相對應,為提升清除電荷的效果,通常設計成覆蓋從成像區到存儲區行數的2-3倍。這部分時序信號通常占空比大于50%,且速度不宜快于垂直轉移的速度,否則也會影響清除電荷的效果。結合DG信號的電平控制,將清除過程轉移到水平移位寄存器的殘余電荷和無用電荷清倒到清倒溝中,就實現了多余電荷的清除。此方案在實現一幀中任意連續N行有用部分的輸出控制的同時,有效減小了多余電荷對成像品質帶來的影響。
2.2 微光相機EMCCD輸出行設計
EMCCD的水平轉移過程是控制SΦ1-SΦ4、ΦR、RΦ1、RΦ2、RΦ3和RΦ2HV信號實現的,在應用清除與部分輸出的時序方案過程中,部分輸出行要與光學系統相匹配。在光學裝調之前,光線匯聚到微光探測器的焦點存在一定偏差,對應輸出行也存在偏差。在光學裝調后需要根據光路與焦平面的拼接結果對輸出行進行調整。此時程序已經固化,焦面電路與光機結構配裝無法拆卸。為了達到輸出行與光路的最佳匹配,使輸出起始行變化不造成裝調及匹配工作的反復,降低系統誤差。在微光相機中,設置了起始輸出行參數。雖然其為時序設計增加了復雜性,但在程序固化后還可以使輸出起始行根據外部參數變化,保證了在光學裝調后輸出行與光路的最佳匹配。
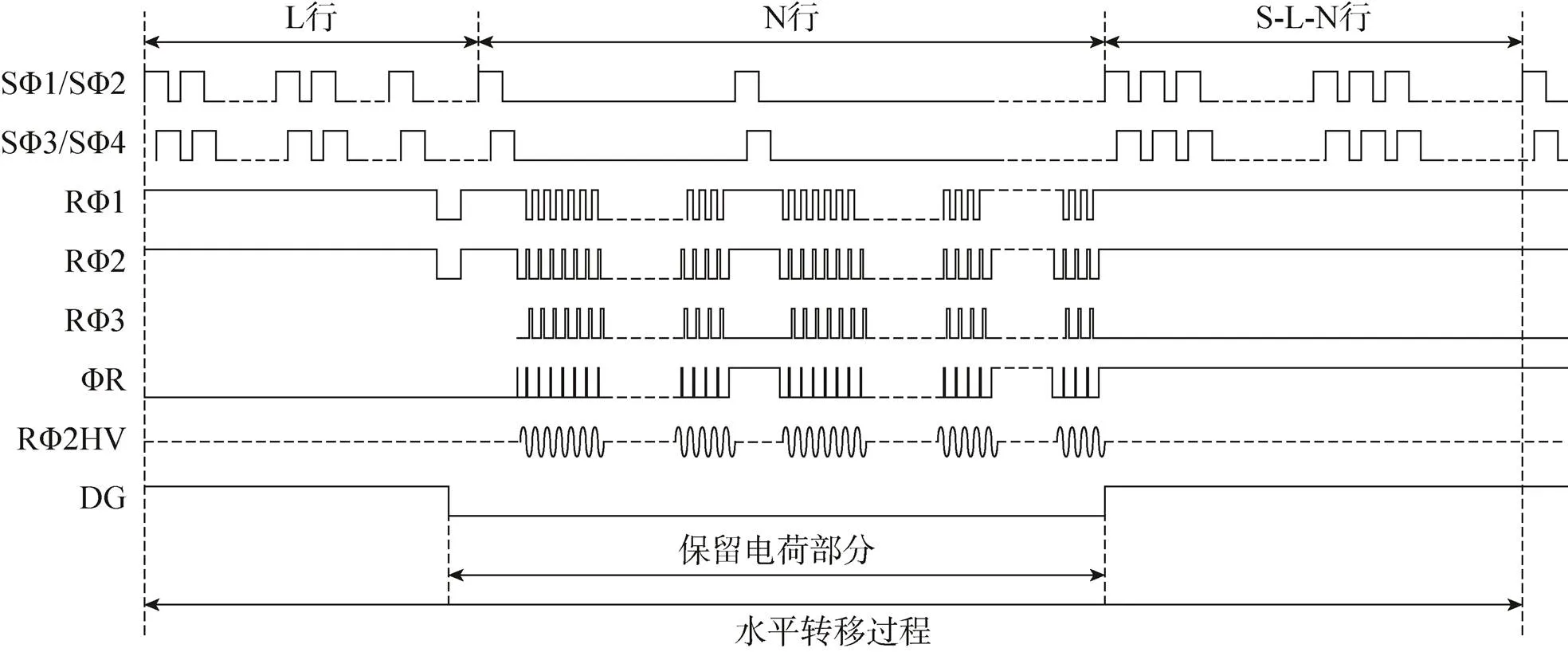
圖6 起始輸出行控制示意
部分行輸出時序方案的水平轉移過程分為3個部分(如圖6所示),第一部分SΦ1-SΦ4信號連續轉移L個周期,同時DG信號保持高電平進行電荷清倒。其中L就是設置的行參數,L的改變可以調整輸出的起始行,其存儲在外部存儲器中,在上電過程中作為初始化參數進行設置。第二部分SΦ1-SΦ4與水平轉移時序信號進行配合,連續輸出N行信號,這N行是對應要得到的模擬信號,此過程DG信號保持低電平保留電荷。第三部分則是用總行數S減去前面不要的L行和保留的N行后,SΦ1-SΦ4信號連續轉移S-L-N個周期,同時DG信號保持高電平進行電荷清倒。對于輸出起始行的參數設置,只需要更改外部存儲器中的對應參數,有效地減少了光學拼接過程中這個參數變化對于測試驗證以及系統調試的影響。
2.3 EMCCD時序信號相位控制
在硬件電路已經定型的情況下,能夠影響模擬信號以及成像系統成像品質的就是其時序信號相位的控制。其中水平轉移時序RΦ1、RΦ2、RΦ3和ΦR可以影響模擬信號輸出波形,而高壓正弦信號與它們的關系可以影響輸出模擬信號的幅值。
如圖7所示,時序設計中在注意S1、S2、S3部分,也就是轉移時序交叉沿情況的同時,我們需要更多的關注S4、S5部分。S4表示RΦ3信號下降沿和RΦ2HV信號波谷之間的相位關系,S5表示RΦ1信號下降沿和RΦ2HV信號波峰之間的相位關系,它們共同影響Φ2HV電極容納的電荷量。設計中需要對RΦ3信號下降沿與波谷、RΦ1信號下降與波峰的相位進行控制,以保證轉移電荷量最大。
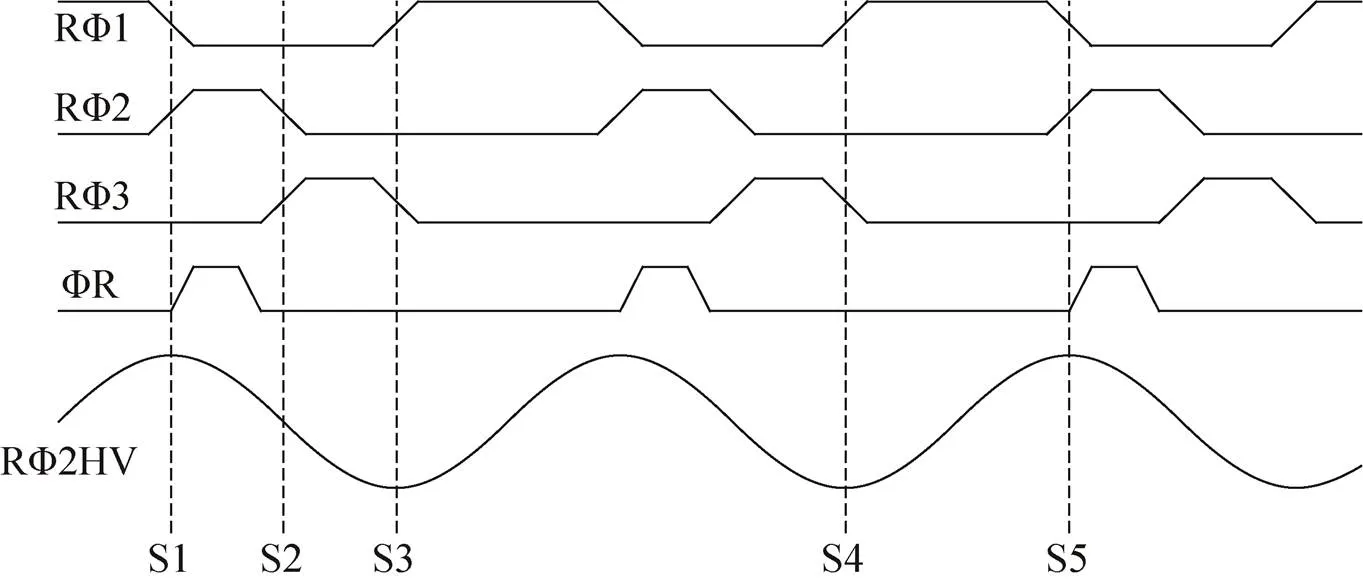
圖7 水平轉移時序信號及高壓信號時序關系
在微光相機中,為了滿足水平轉移時序信號的控制,采用了邏輯器件內部門延時的方式。延時控制設計成通過指令可以進行延時調整,延時量通常可以達到ns級。而對于高壓正弦信號的調整,設計了描點法來實現相位和幅值的控制。應用8個包含相位和幅值信息的數據來表示整個波形的信息,并應用DA器件進行轉換。在一個像元周期內依次將0°、45°、90°、135°、180°、225°、270°、315°包含幅值信息的數據發送給DA芯片,使其輸出一組階梯包絡信號,再經過濾波放大電路得到放大之后的高壓正弦信號。應用這種方式的相位調整,理論精度可以達到(360/2N)°(N為DA位數),實際應用中根據高壓正弦信號的速度可以應用不同的調整精度(通常選擇1°)。這里需要指出,為了得到更為準確的正弦信號,可以采用16點或者32點等更密的描點方式產生階梯波,但這樣也將帶來電路和邏輯設計復雜化。需要注意的是,在不同的工況下,包含相位信息和幅值信息的數據需要進行重新計算標定,以適應不同應用的信號品質要求。這種信號調整方法為數據實時標定提供了途徑,可以在硬件電路固定的情況下,找到高壓正弦信號與時序信號匹配的最佳相位。
3 EMCCD時序設計仿真與測試驗證
根據EMCCD時序設計的方案,水平時序的相位控制,以及高壓信號的控制等幾個方面,結合微光相機的視頻電路成像系統,對應用FPGA實現時序設計相關邏輯,以及包含驅動設計在內的相關功能進行了測試和驗證。
對于微光相機中的清除與部分輸出的時序方案,設計了測試用例和相關參數,應用仿真工具進行了仿真驗證。
圖8中包含垂直轉移信號IΦ1-IΦ4、SΦ1-SΦ4,水平轉移信號ΦR、RΦ1、RΦ2、RΦ3和清倒信號DG。從仿真結果上可以明顯地看出整個時序包括清除部分、積分部分以及垂直轉移、部分水平轉移和清倒部分。T1為清除部分,進行多余電荷清除;T2為積分時間部分,進行5ms的積分時間控制;T3為垂直轉移部分;T4為部分水平轉移部分,進行64行的轉移輸出,起始行為256行。通過仿真驗證可以得出微光相機時序方案設計要求一致,滿足實際應用需求。
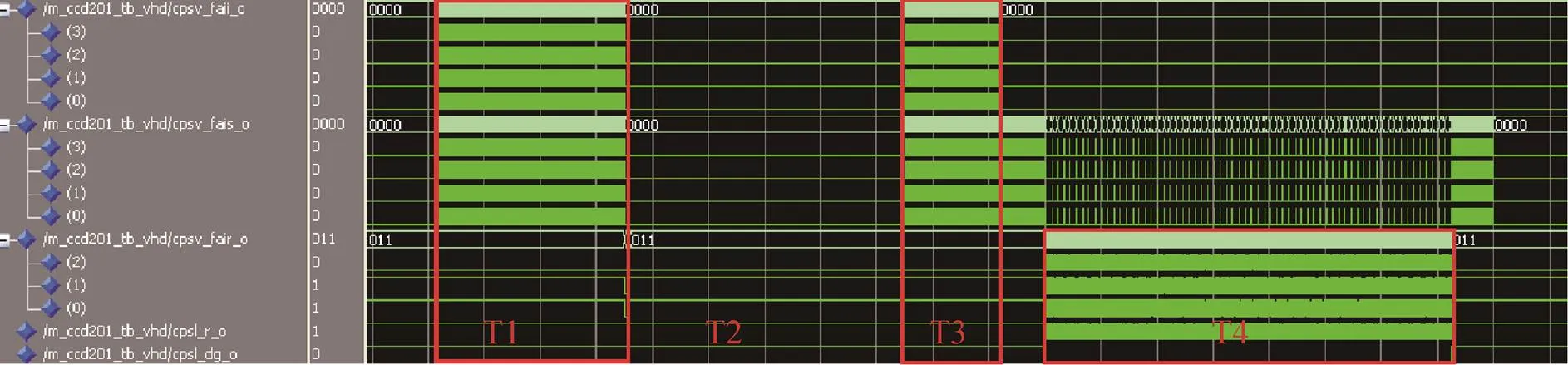
圖8 微光探測器時序仿真
在對時序設計進行邏輯仿真的基礎上,在實驗室條件下,應用微光相機的相機主體電路以及焦面驅動電路等,對輸出時序信號的波形進行了測試。
EMCCD的時序信號工作在5MHz頻率,應用部分輸出的方案。圖9中依次是RΦ1、ΦR、RΦ2和RΦ3信號,以及它們的交疊關系。其中RΦ1上升沿提前RΦ3下降沿,RΦ2上升沿提前RΦ1下降沿,RΦ3上升沿提前RΦ2下降沿,RΦ2上升沿提前ΦR上升沿。可見其水平轉移信號的相位控制實測情況與時序設計的交叉沿情況一致,滿足微光相機的應用要求。
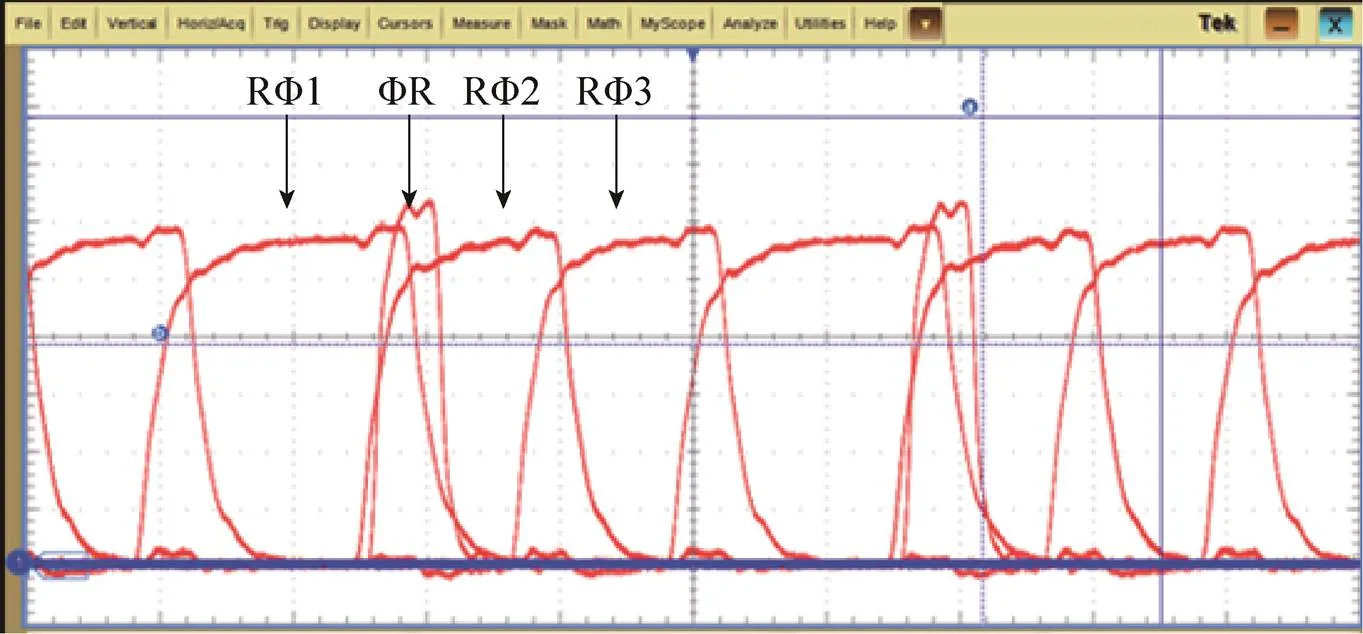
圖9 水平轉移信號實測波形
在驅動芯片固定的情況下,時序信號也經過調整之后,高壓信號與時序信號的相位關系也影響著系統的成像品質[17]。在實驗室條件下,輸入光強不變,成像參數不變,高壓正弦信號幅值為44V,調整其相位,對比其前后信號(見圖10-圖11)。
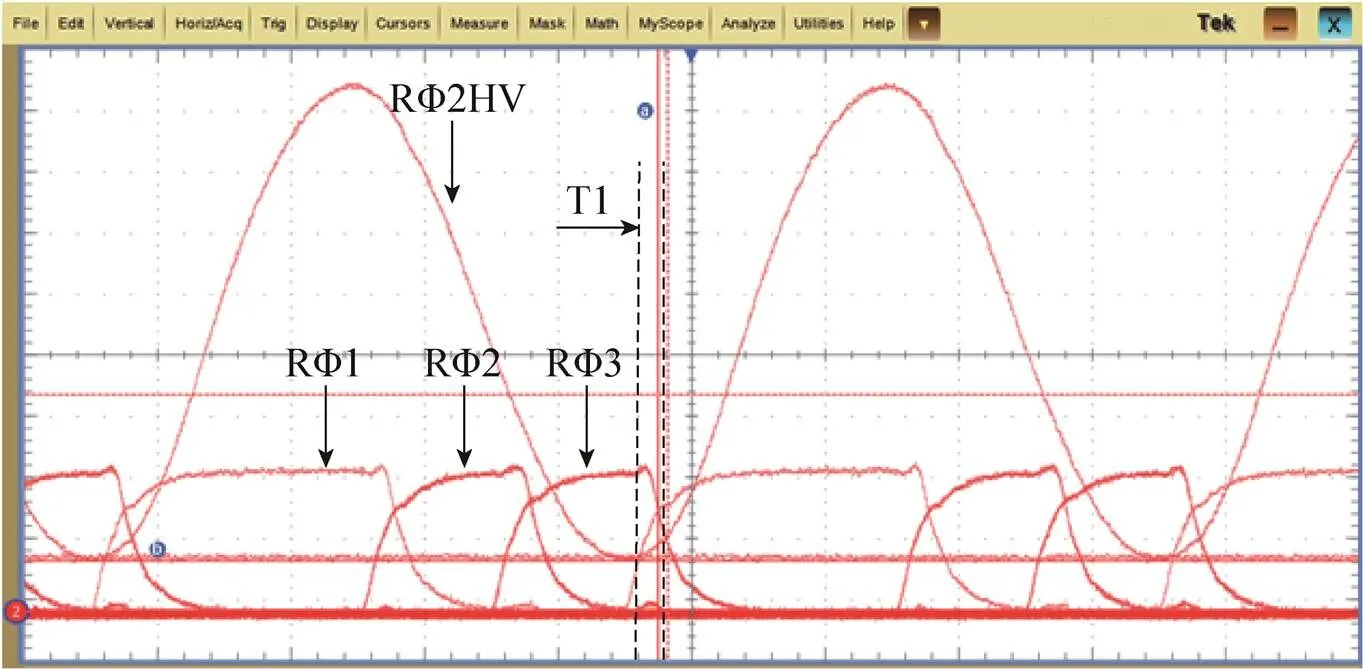
圖10 相位調整前水平轉移信號和高壓信號實測波形
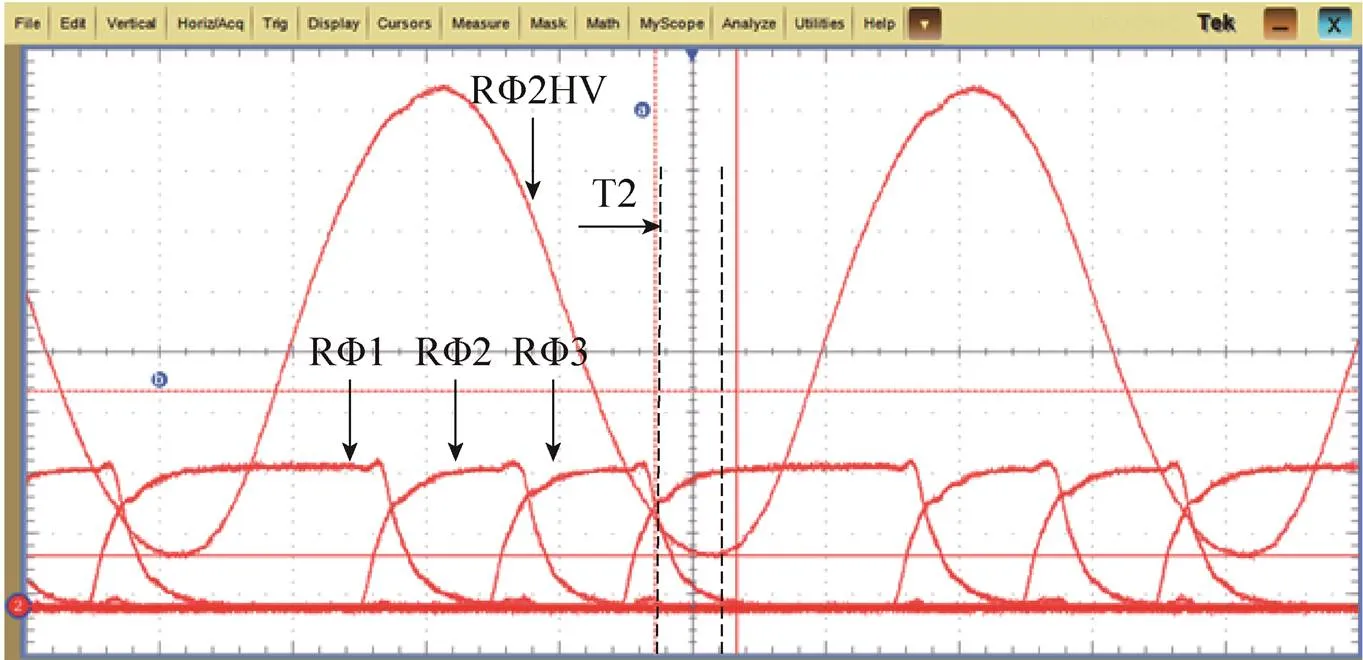
圖11 相位調整后水平轉移信號和高壓信號實測波形
在高壓信號相位調整之前,其與RΦ1上升沿和RΦ3下降沿的關系由T1表示約9ns,即高壓正弦信號波谷與RΦ1和RΦ3交叉沿的相位關系。此時高壓正弦信號波谷提前RΦ1和RΦ3交叉沿,模擬信號幅值對應的DN值約為9 600。
在高壓信號相位調整之后,其與RΦ1上升沿和RΦ3下降沿的關系由T2表示約18ns,即高壓正弦信號波谷與RΦ1和RΦ3交叉沿的相位關系。此時高壓正弦信號波谷滯后RΦ1和RΦ3交叉沿,模擬信號幅值對應的DN值約為9 200,其DN值明顯下降。
在時序信號不變的情況下,高壓信號對模擬信號有直接的影響,通過正弦波相位的調整,可以增大模擬信號的幅值。應用描點法對高壓正弦信號相位進行控制[18],在輸入光信號不變,高壓正弦信號幅值不變的情況下,對其進行了步進為1°的相位調整,得到了正弦波相位和圖像灰度值的對應關系。應用MATLAB工具,進行了曲線擬合。
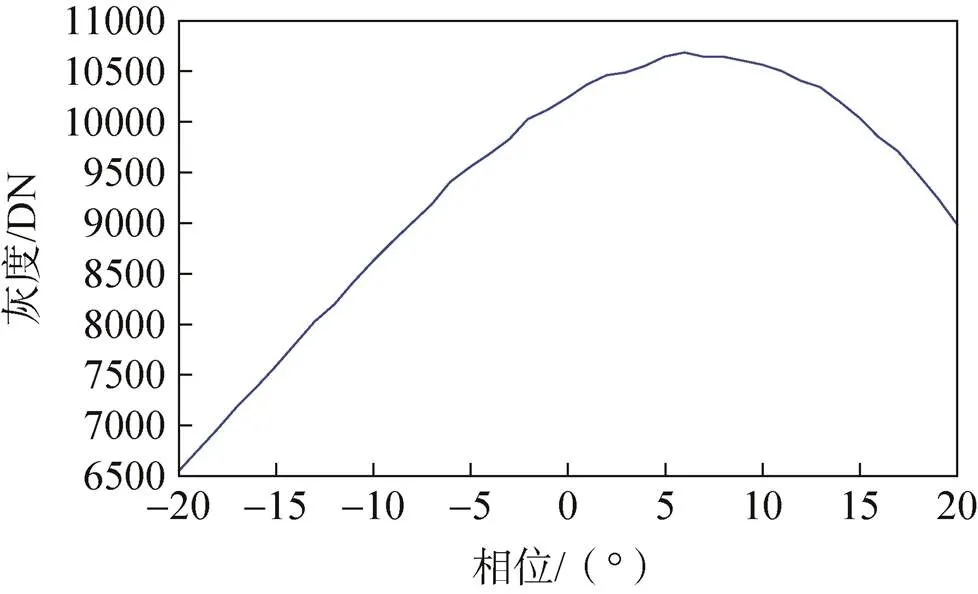
圖12 正弦信號相位與圖象灰度值擬合曲線
圖12中橫軸為相位,單位度,縱軸位為灰度值,單位為DN值。根據示波器測試的結果,選擇在–20°到20°的相位調整范圍內,調整高壓信號的相位。對應相位調整灰度值的變化是非線性的,表征不同的相位點對應的倍增過程的電荷轉移效率不同,從而導致輸出的模擬信號幅值不同。從中我們可以找到灰度值較高的區間:5°~10°,從中可以選取高壓正弦信號與時序信號的最佳相位匹配相位。在微光相機中,高壓正弦信號的相位選擇了5°,可以在滿足設計要求的前提下,實現成像指標最優。
在實際應用中還可以加入EMCCD的溫度控制,在不同的溫度參數的條件下進行相位調整。尤其需要繪制制冷條件下的對應曲線,從而找出低溫工況的最佳相位位置。這樣就可以進一步比對不同工況下的最佳匹配相位,選取適合不同工作環境的高壓正弦信號相位。
4 結束語
通過對EMCCD成像系統的介紹以及對EMCCD時序設計的研究,在硬件電路固定的情況下,指出了時序設計上能夠影響圖像品質的因素,即時序設計方案選取,水平轉移時序相位控制以及高壓正弦信號的相位和幅值控制,提出了部分輸出的時序方案,對時序信號進行相位延時,對高壓正弦信號應用描點法進行了相位調整。經過EMCCD時序設計的應用以及仿真驗證和波形測試,驗證了EMCCD時序信號相位控制和高壓信號相位控制與調整的設計能夠實現時序信號相位的精確控制,并通過調整使高壓正弦信號和時序信號之間的相位關系找到其最匹配的工作狀態,從而改善模擬信號的波形,進而改善成像系統的圖像品質。在微光相機中,這些設計得到了充分的驗證,在時序控制調整的基礎上信噪比提升了1-2個dB值,為整個系統的成像品質提升提供了基礎保障。
[1] 王大勇. 低噪聲微光圖像采集系統的研究[D]. 杭州: 浙江大學, 2012. WANG Dayong. Research of Low Noise and Low Light Image Acquisition System[D]. Hangzhou: Zhejiang University, 2012. (in Chinese)
[2] 何家維, 何昕, 魏仲慧, 等. 電子倍增CCD星相機的設計[J]. 光學精密工程, 2010, 18(6): 1396-1403. HE Jiawei, HE Xin, WEI Zhonghui, et al. Design of EMCCD Cameras for Star Detecton[J]. Optics and Precision Engineering, 2010, 18(6): 1396-1403. (in Chinese)
[3] 胡曉華, 劉松濤, 潘振東, 等. 星載微光探測儀器的發展及其數據應用[J]. 中國光學, 2015, 8(3): 350-359. HU Xiaohua, LIU Songtao, PAN Zhendong, et al. Progress in Spaceborne Shimmer Detector and Data Application[J]. Chinese Optics, 2015, 8(3): 350-359. (in Chinese)
[4] BANKERT R L, SOLBRIG J E, LEE T F. Automated Lighting Flash Detection in Night Time Visible Satellite Data[J]. Weather and Forecasting, 2011, 26(3): 399-408.
[5] SIMON T. Astronomical Spectroscopy with Electron Multiplying CCDs[D]. Sheffield: The University of Sheffield, 2010.
[6] 楊少華, 郭明安, 李斌康, 等. 百萬像素電子倍增CCD數字化相機的設計[J]. 光學精密工程, 2011, 19(12): 2970-2976. YANG Shaohua, GUO Mingan, LI Binkang, et al. Design of Digital EMCCD Camera with Mega Pixels[J]. Optics and Precision Engineering, 2011, 19(12): 2970-2976. (in Chinese)
[7] 何家維, 何昕, 魏仲慧, 等. 一體化EMCCD微光相機的設計[J]. 紅外, 2014, 35(10): 14-20. HE Jiawei, HE Xin, WEI Zhonghui, et al. Design of Integrated EMCCD Camera for Low-light Detection[J]. INFRARED(Monthly), 2014, 35(10): 14-20. (in Chinese)
[8] 周小珂, 嚴衛, 白衡, 等. 基于DMSP/OLS數據的夜間低云大霧監測技術研究[J]. 遙感信息, 2012, 27(6): 86-90. ZHOU Xiaoke, YAN Wei, BAI Heng, et al. Detection of Heavy Fogs and Low Clouds During Nighttime Using DMSP-OLS Data[J]. Remote Sensing Information, 2012, 27(6): 86-90. (in Chinese)
[9] 唐聰. 基于EMCCD的微光夜視系統的研究與設計[D]. 長春: 長春理工大學, 2013. TANG Cong. Research and Design of LLL Night Vision System on EMCCD[D]. Changchun: Changchun University of Science and Technology, 2013. (in Chinese)
[10] 卜洪波, 陳瑞明, 張玉貴, 等. 基于電子倍增CCD的微光成像遙感器焦面電路設計[J]. 航天返回與遙感, 2012, 33(5): 47-54. BU Hongbo, CHEN Ruiming, ZHANG Yugui, et al. Focal Plane Circuit Design Based on Electron Multiplying CCD in Remote Sensor for Faint Light Imaging[J]. Spacecraft Recovery & Remote Sensing, 2012, 33(5): 47-54. (in Chinese)
[11] 韓露, 熊平. EMCCD工作原理及性能分析[J]. 傳感器世界, 2009, 15(5): 24-28. HAN Lu, XIONG Ping. The Analysis of Operating Principle and Performance of EMCCD[J]. Sensor World, 2009, 15(5): 24-28. (in Chinese)
[12] 沈吉. 基于FPGA的電子倍增CCD成像系統設計[D]. 南京: 南京理工大學, 2014. SHEN Ji. Imaging System Design of EMCCD Base on FPGA[D]. Nanjing: Nanjing University of Science and Technology, 2014. (in Chinese)
[13] 余達, 龍科慧, 徐東, 等. 基于微光應用的CCD201驅動設計技術[J]. 儀器儀表學報, 2012, 33(8): 287-291. YU Da, LONG Kehui, XU Dong, et al. Design of a CCD201 Drive for the Low Light Level Applications[J]. Chinese Journal of Scientific Instrument, 2012, 33(8): 287-291. (in Chinese)
[14] 白玉棟, 張守才. CCD 電子倍增CCD驅動電路設計[J]. 光電技術應用, 2013, 28(3): 51-54. BAI Yudong, ZHANG Shoucai. Driving Circuit Design for Electronic Multiplication CCD[J]. Electro-optic Technology Application, 2013, 28(3): 51-54. (in Chinese)
[15] 李強, 樊奔, 陳希. 一種基于多線陣集成TDICCD的低軌成像驅動方法[J]. 航天返回與遙感, 2016, 37(1): 32-40. LI Qiang, FAN Ben, CHEN Xi. Driving Method of Low Earth Orbit Imaging Based on Multi-linear TDICCD[J]. Spacecraft Recovery & Remote Sensing, 2016, 37(1) : 32-40. (in Chinese)
[16] 張龍, 何偉基, 顧國華, 等. 電子倍增CCD 模擬前端設計與信號優化[J]. 紅外與激光工程, 2014, 43(7): 2263-2269. ZHANG Long, HE Weiji, GU Guohua, et al. Design and Signal Optimization of Analog Front End of EMCCD[J]. Infrared and Laser Engineering, 2014, 43(7): 2263-2269. (in Chinese)
[17] 謝宗寶, 張濤, 張晶晶. 空間EMCCD成像系統中倍增高壓時鐘驅動設計[J]. 科學技術與工程, 2011, 11(17): 3946-3950. XIE Zongbao, ZHANG Tao, ZHANG Jingjing. High-voltage Clock Design of Space EMCCD Imaging Detection System[J]. Science Technology and Engineering, 2011, 11(17): 3946-3950. (in Chinese)
[18] WANG Peng, HE Zhikuan, LIU Qi. Research of Timing Design and Adjusting Methods of EMCCD[J]. Proc. of SPIE, 968604: 1-6.
(編輯:毛建杰)
Study on Timing Design of a Low Light Sensor
WANG Peng LIU Qi XU Lei
(Beijing Institute of Space Mechanics & Electricity, Beijing 100094, China)
With the development of science and technology, the imaging systems which use EMCCD as the low light sensor are applied more and more widely. In this paper, one EMCCD is used as the senor for the low light channel in the low light camera, and then its timing design is studied by associating the EMCCD's structure characteristics. Through introducing the camera's imaging system and comparing the different timing design solutions, one can find that the timing control and the high voltage signals control are important for the timing design of the low light sensor. Through design, test and verification, it shows that the logic of the EMCCD’s timing design in the low light camera is right , which can be one important factor to provide the basic guarantee of the system imaging quality.
timing design; high voltage signals; electron-multiplying CCD; low light cameras; space remote sensing
V443+.5
A
1009-8518(2018)02-0063-10
10.3969/j.issn.1009-8518.2018.02.008
2017-03-10
國家重大科技專項工程
王鵬,男,1979年生,西北工業大學航空工程碩士,高級工程師。研究方向為遙感相機FPGA軟件設計。E-mail: wangp508@126.com。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00