四旋翼無人機建模與PID控制器設計
2018-05-14 14:49:48馮培晏
工業設計 2018年6期
馮培晏


摘要:文中通過對四旋翼無人機的機體結構和飛行原理的認識,運用牛頓——歐拉法對四旋翼無人機進行動力學受力分析,在小角度轉動下,建立了該無人機的數學模型。運用PID對其進行控制,通過無人機的數學模型,設計了雙環PID控制器(內環姿態控制與外環位置控制),通過MATLAB仿真驗證其有效性。
關鍵詞:四旋翼無人機;建模;PID控制
中國分類號:TB472 文獻標識碼:A
文章編碼:1672-7053(2018)06-0135-03
近年來,隨著科技的不斷發展和我國工業技術的不斷革新,越來越多的研究機構投入到四旋翼無人機的研究中。四旋翼無人機由于不需要尾翼,在結構上與傳統無人機相比,簡單操作更加靈活多變、價格低廉、便于生產、拆卸方便、易于維護且方便運輸,能夠在狹小的空間內實現垂直起降、定點懸停、低速飛行、旋轉、側飛及倒飛等動作,操作靈活,可控性較強。四旋翼無人機的發展和研究以國內發展研究狀況還存在這些問題:(1)數學模型建立無法完全精確:讓四旋翼無人機的平穩飛行,必須在建立精準的數學模型下,才能設計得到的控制器。由于四旋翼無人機在實際飛行的過程中會遇到不確定性的外界因素的影響,和無人機機體還可能會受到自身的物理效應(陀螺效應、空氣阻力、擾動氣流等)的影響。再者傳感器采集的飛行數據也會存在一定的誤差,使得完全精準的四旋翼無人機的數學模型建立存在一定的難度;(2)飛行控制算法:四旋翼無人機本身就是一個6自由度、4個變量輸入的多變量、強耦合的欠驅動非線性系統,對干擾十分敏感,再加上傳感器精度和建模的準確性使得對控制器的設計造成了很大的不便。飛行控制算法是保證四旋翼無人機平穩飛行的前提。現在四旋翼無人機的飛行控制算法主要包括PID控制、滑模控制、H ∞控制、反步法以及智能控制等;(3)自主導航智能飛行:四旋翼無人機不但可以遙控器控制,還可以自主導航智能飛行;(4)最優化設計:在進行四旋翼無人機的總體設計時,既要保證速度和功耗在條件允許范圍內,還要根據需求選擇合適的無人機材料和配件。與之同時還要遵守體積小、質量輕、功耗小、成本低、響應快的原則。
本文通過對四旋翼無人機機體結構和飛行原理了解,運用牛頓歐拉定律對其進行動力學受力分析,建立其小角度飛行下的數學模型,運用PID算法設計了PID控制器,內環姿態控制與外環位置控制,并進行了matlab仿真驗證其有效性。
1機體結構與飛行原理
四旋翼無人機擁有4個旋翼,且相互對稱,分別分布在機體的前后、左右四個方向。如圖1所示:
四旋翼飛行器控制機體的實時姿態和實時位置是通過調節4個電機轉速實現的,電機轉速的改變就改變了旋翼的轉速,從而使每個旋翼產生的升力不同,在機架4個旋翼位置不同升力的變換,使得機體發生姿態和位置的變換。四旋翼無人機擁有4種不同的飛行方式:
1)垂直運動:當四旋翼無人機同時加大4個電機的相同轉速時,4個旋翼增加相同的升力,若產生的總升力大于機體所受到的重力時,無人機便會垂直上升;反之,當其同時減少4個電機的相同轉速時,產生的總升力小于機體所受的重力,就會垂直下降。如果在沒有外界干擾時,無人機產生的總升力等于所受到的重力時,這時四旋翼無人機處于水平懸停。
2)偏航運動:前文提到,四旋翼無人機用了2個正槳和2個反槳,是為了抵消旋翼在旋轉過程中所產生的扭矩,讓無人機保持平穩的飛行。相鄰的旋翼螺旋槳不同,對角線上的電機旋轉方向也不同。旋翼產生的扭矩與旋翼自身的轉速有關,當四個電機轉速相同時,四個旋翼產生的扭矩相互抵消,四旋翼無人機不發生轉動;當四個電機轉速不完全相同時,不平衡的扭矩會引起四旋翼無人機轉動。在圖2(b)中,當電機2和電機4的轉速上升,電機1和電機3的轉速下降時,旋翼2和旋翼4對機身的反扭矩大于旋翼1和旋翼3對機身的反扭矩,機身便在富余反扭矩的作用下繞z軸轉動,實現飛行器的偏航運動,轉向與電機2、電機4的轉向相反。
3)俯仰運動:電機1轉速減少(增加),電機3轉速增加(減少),保持電機2與電機4的轉速不變。由于旋翼3升力增加(減少),旋翼1升力下降(增加),產生的不平衡力矩使機身傾斜,產生向前(向后)的分力,向前飛行。
4)橫滾運動:橫滾運動與俯仰運動的原理相同,電機2轉速減少(增加),電機4轉速增加(減少),保持電機1與電機3的轉速不變。由于旋翼4升力增加(減少),旋翼2升力下降(增加),產生的不平衡力矩使機身傾斜,產生側向的分力,側向飛行。
四旋翼無人機的四種飛行運動模式可以相互疊加飛行,從而通過復雜的飛行運動完成指定的飛行任務和期望位置。
2建立數學模型
建立慣性坐標系N系與機體坐標系B系如圖2所示:
本文選擇的導航坐標系為地理坐標系,其的原點選在初始無人機位置,Z軸沿當地參考橢球的法線指向天頂,×軸在當地水平面內且沿當地經緯度指向東,Y軸沿當地子午線指向北。滿足右手定則。在我國,地理系按照東一北一天的旋轉次序選取,而在西方,地理坐標系按照北一東一地的旋轉次序選取。
機體坐標系對于四旋翼無人機而言,無人機的質心為機體坐標系的原點,X軸從質心出發沿著機架指向1號旋翼,Y軸從質心指向4號旋翼,Z軸豎直向上,相互垂直且滿足右手定則。
為了方便確定四旋翼無人機的姿態時,定義以下歐拉角:
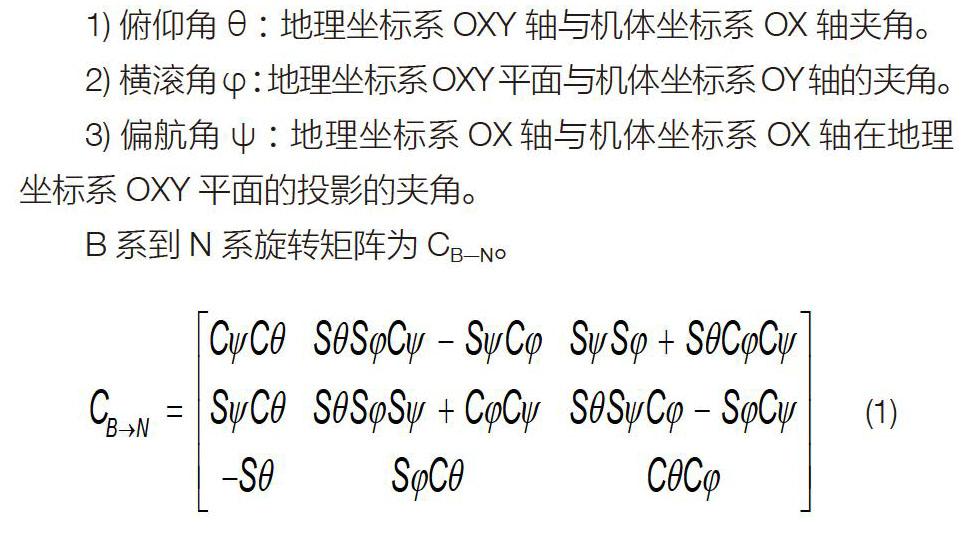
1)俯仰角θ:地理坐標系OXY軸與機體坐標系ox軸夾角。
2)橫滾角φ:地理坐標系OXY平面與機體坐標系OY軸的夾角。
3)偏航角ψ:地理坐標系OX軸與機體坐標系OX軸在地理坐標系OXY平面的投影的夾角。
B系到N系旋轉矩陣為CB-N。
其中C為cos,S為sin。
在建立四旋翼無人機動力學模型前,假設:(1)四旋翼無人機視為剛體且質量均勻保持不變;無人機是標準的十字對稱型;(2)質心與B系原點重合;(3)不計地球自轉和公轉運動的影響,重力加速度不變。根據牛頓一歐拉定律,在小角度飛行下忽略空氣阻力,螺旋槳的陀螺效應以及高階量的乘積等,四旋翼無人機的數學模:
kt為升力系數,kd為扭矩系數,ω為各旋翼的旋轉速度,U1垂直方向輸入量,U2橫滾控制輸入量,U3俯仰控制輸入量,U4偏航控制輸入量,俯仰角θ,橫滾角φ,偏航角ψ,lxlylz為慣性扭矩。
3 PID控制器設計
通過對四旋翼無人機的建模,設計器PID控制器,無人機控制結構如圖3所示。
設定在飛行過程中,期望偏航姿態角ψd已經知道,期望位置信息為XdYdZd通過接收器得到,無人機機體位置信息X、Y、Z通過傳感器反饋回飛控計算得出,與期望位置坐標信息對比,經過位置控制器計算得出控制量U1,此為四旋翼無人機的飛行升力,還得出期望俯仰姿態角θd與橫滾姿態角φd。四旋翼無人機實際姿態角是通過IMU等傳感器反饋回來的數據經過算法計算得出,與期望姿態角進行對比,再通過姿態控制器得出控制量U2U3U4。計算出的控制量經過PWM最終傳給4個電機,從而改變無人機姿態與位置。
PID是P算法與I算法與D算法3中算法各種組合的統稱。可以選擇為PD,PI,單獨的P算法等。P(比例控制)以減少系統穩定性為前提減小系統誤差。I(積分)和D(微分)必須和P(比例)控制搭配使用,I(積分)反映系統的累計偏差,使系統消除穩態誤差。D(微分)反映系統偏差信號的變化率,具有預見性,從而進行超前控制。四旋翼無人機的控制一般采用負反饋的PID控制器。穩定性(P和I降低系統穩定性,D提高系統穩定性):在平衡狀態下,系統受到某個干擾后,經過一段時間其被控量可以達到某一穩定狀態;準確性(P和I提高穩態精度,D無作用):系統處于穩態時,其穩態誤差;快速性(P和D提高響應速度,I降低響應速度):系統對動態響應的要求。一般由過渡時間的長短來衡量。
PID控制器參數:
姿態回路P系數為15,i系數為0.2,d系數為9,位置回路P系數為12,i系數為0.1,d系數為5。
為了求取控制器的參數,需要獲取無人機的動力學參數,主要包括機體機身高度、機體重量、旋臂臂展、繞三軸旋轉的轉動慣量以及螺旋槳的升力系數和扭矩系數。其中機體重量、旋臂臂展可以通過器件直接測量得出,螺旋槳的升力系數以及扭矩系數通過公式獲取。計算無人機的升力系數及扭矩系數經驗公式為Kt=CtρAr2;Kd=CdρAr2;在兩個公式中,Ct,Cd表示螺旋槳的翼型相關的常數,ρ為空氣密度,A為螺旋槳旋轉一周掃過的面積,r為螺旋槳的長度。
假定四旋翼無人機完全對稱,且四旋翼無人機質量分布均勻,那么四旋翼無人機的轉動慣量為:繞X(或Y)軸的轉動慣量lX(或lY以及繞Z軸的轉動慣量lZ。假定四旋翼無人機的電機是標準圓柱體,無人機機體重心個個硬件的組合體包括負載視為一個標準的圓柱體,機體的四個懸臂均視為質量均有的長方體。根據經典力學中關于轉動慣量的定義可知,若一個標準圓柱體繞其中心軸轉動,其質量為m,半徑為r,高度為h,那么其轉動慣量為JX=JY=m(3r2+h2)/12繞其橫截面上的某一軸轉動的轉動慣量為:JZ=m r2/2,若質量均勻的細桿(質量為m,長度為1)繞自身的中心轉動,那么細桿的轉動慣量為:J=ml2/12。在由轉動慣量的平行軸定律可知,剛體的轉動慣量,等于剛體對于通過質心并與該軸平行且距離為d的軸的轉動慣倆個加上剛體的質量與兩軸見距離的平方的乘機,即J=Jc+md2。實驗所用無人機動力學參數為表1:
4實驗仿真與結果
初始狀態為【0 0 1 0 0 0】,期望的狀態設定為[1 1 2 0 0 0],仿真結果如下圖4所示。
由仿真圖可以知道,由于耦合作用的影響等其他因素影響,PID控制對于四旋翼無人機的控制效果不是很好。
參考文獻
[1]趙晨懿.淺談無人機的發展現狀與技術支持[J].海峽科技與產業,2017 (9):133-135.
[2]武麗敏.GPS在無人機上的應用[D].天津大學,2011.
[3] Tao Y, Xie G,Chen Y,etc. A PID and Fuzzy Logic Based Method for Ouadrotor Aircraft Control Motion[J]. Journal of Intelligent & Fuzzy Systems.2016, 31(6):2975-2983.
[4] Park S, Won D H,Kang M S,etc. RIC (Robust Internal-loop Compensator) Based Flight.Control ofa Cluad-Rotor Type UAV[C].IEEE International Conference on Intelligent Robots and Systems, 2015: 1024-1030.
[5] Liu Xiaogang, Song Guoshou. Adaptwe PID Controller Based on Fuzzy,Micro UAV Technology[C]. ELECTRONIC INFORMAT10N AND ELECTRICAL ENGINEERIKIG, 2013, 225-229.
[6]吳中華,賈秋玲.四旋翼幾種控制方法研究[J].現代電子技術,2013,36 (15):88-94.
[7]侯圣勇四旋翼無人飛行器控制器的設計與實現[J].數字通信世界,2015 (10).
