基于感應磁場的潛艇磁異常計算模型
2018-05-10 08:15:44劉輝
水下無人系統學報 2018年2期
劉 輝
?
基于感應磁場的潛艇磁異常計算模型
劉 輝
(中國船舶重工集團公司 昆明船舶設備研究試驗中心, 云南 昆明, 650051)
由地磁感應引起的潛艇磁異常是現代航空反潛的重要依據, 研究磁異常對潛艇防護有重要意義, 文中針對潛艇感應磁異常缺乏完整計算模型的現狀, 采用磁體模擬法將潛艇感應磁矩看作3個正交磁偶極矩的疊加, 并根據潛艇橢球體模型在外場中的磁化規律, 推導了感應磁矩的解析表達式, 進而得到磁異常計算公式。最后通過仿真, 得到潛艇感應磁異常在高空的分布特性, 仿真結果符合實際情況, 基本印證了計算模型的正確性。
航空反潛; 潛艇; 磁異常; 磁偶極子; 感應磁場
0 引言
潛艇由鋼鐵建造而成, 是一個大型鐵磁體, 由于長期處在地磁場的磁化作用下, 產生了固定磁矩與感應磁矩[1]。固定磁矩可以看作固定值, 不會隨著海域地磁場值與潛艇航向的變化而改變, 感應磁矩和海域地磁場值與潛艇航向關系密切, 且很難通過消磁手段消除, 是潛艇磁矩的重要構成, 由感應磁矩引起的磁異常是當前航空反潛的重要依據, 文中針對潛艇感應磁性形成的磁異常進行研究。
當前對潛艇磁異常的研究主要集中于建模方法以及探測技術[2-5], 普遍采用的建模方法有積分方程法、有限元法以及磁體模擬法等[6]。積分方程法有嚴格的理論依據, 需要對潛艇磁矩構成進行精確的剖分, 建模過程抽象, 數學模型復雜且計算量大, 結果不夠直觀。有限元法可借助計算機輔助軟件(ANSYS、Flux等)建立高精度的潛艇幾何模型, 并劃分有限元網格得到單元區域, 再進行數值求解, 將潛艇磁場建模問題轉化成泛函變分問題, 可以得到潛艇磁場的有限元數值解。但由于潛艇體積大, 需要建立龐大的潛艇、海水以及空氣的網格模型, 計算量很大, 普通計算機無法完成。該方法可用于仿真分析潛艇局部的精細特性, 在分析潛艇高空的磁異常時不便使用。磁體模擬法又稱等效源法, 利用已知磁場分布的磁性物體來等效實際潛艇, 模擬潛艇磁場, 其建立模型過程較為簡單, 磁場數學模型通常計算量小且直觀易懂, 雖然在分析潛艇近場時誤差較大, 但在遠場條件下較為準確, 用于分析潛艇高空的磁異常較為適用。上述不同方法建模的原理和思路不同, 但得到的結論基本一致。
參考文獻[2]與[3]將潛艇磁矩等價于某個方向上的磁偶極矩來推算潛艇磁場, 但只推導了潛艇磁異常與潛艇磁矩之間的函數關系, 并未給出潛艇磁矩的詳細計算方法。文中在前人研究的基礎上[7-8], 針對潛艇感應磁異常缺乏完整計算模型的現狀, 采用磁體模擬法, 將潛艇看作旋轉橢球體模型, 在高空探潛的情況下, 分解潛艇感應磁矩為3個方向正交的磁偶極矩, 并依據橢球體模型在外磁場中的磁化規律, 推導潛艇感應磁矩作為潛艇尺寸、航向以及地磁場強度等參數變量的函數表達式, 最終達到計算磁異常的目的。
1 磁偶極子模型
磁偶極子是最基本的磁單元, 在磁場分析中有著重要的作用, 自然界的任何磁矩都可以認為是若干個磁偶極矩的疊加, 對于磁偶極子的磁場, 計算方法有很多, 但大多數是在極坐標下的計算結果, 文中需要計算磁場在高空平面上的分布, 因此選擇一種直角坐標系下的磁偶極子磁場計算方法。
如圖1所示, 以偶極子模型的中心為坐標原點, 海平面為平面, 垂直于海平面向上為軸方向, 建立右手直角坐標系, 對于空間中的任意一點(,,), 偶極子在該點產生的磁感應強度可表示如下。

圖1 計算模型坐標系


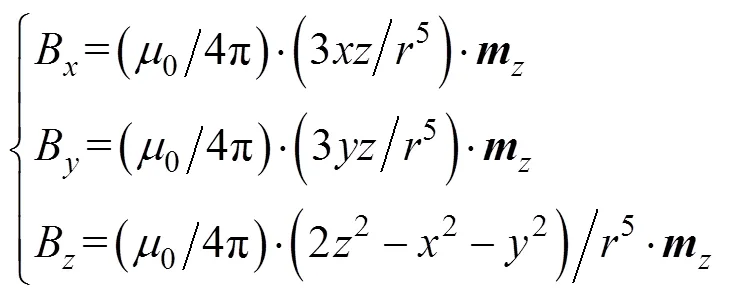

若能通過計算或者測量得到潛艇在3個方向上的磁矩、、的值, 便可利用上式來計算潛艇在周圍空間任意一點的磁場值。
2 潛艇感應磁矩
潛艇在出航前需經過消磁, 以減小被發現或者被攻擊的概率, 消磁后的潛艇, 固定磁矩對潛艇磁矩的貢獻很小; 但由地磁場磁化引起的感應磁矩, 無法通過簡單的消磁方式去除, 成為潛艇磁矩的最主要貢獻部分, 因此文中的研究重點則放在潛艇感應磁矩上, 在地磁場的磁化作用下, 潛艇3個方向上的感應磁矩不但與潛艇的尺寸、材料等諸多因素有關, 而且與潛艇所在海域的地磁場值、方向以及潛艇航向有著重要關系[9]。由于潛艇感應磁矩是由地磁場磁化引起的, 所以與地磁場之間有著固定的關系, 潛艇形狀近似于旋轉橢球體, 在遠場計算條件下, 可將潛艇看作旋轉橢球體模型, 根據橢球體模型在外場中的磁化規律, 潛艇磁矩三分量同地磁場三分量之間的函數關系可表示為[10]
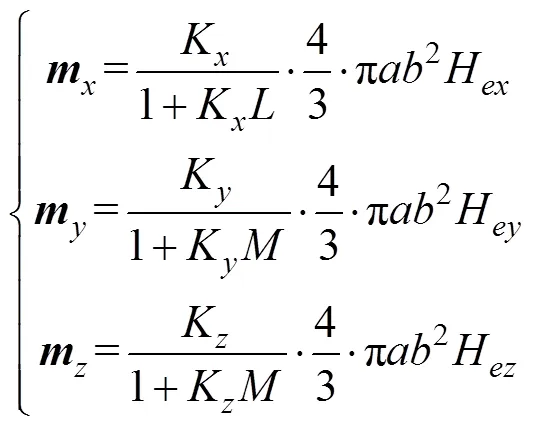
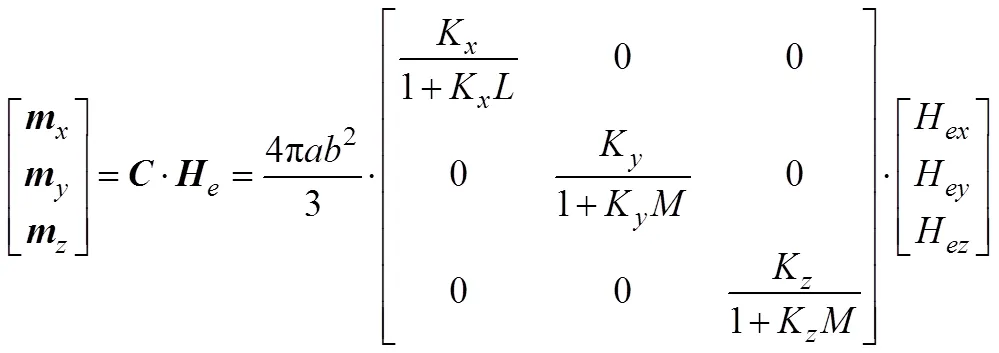
其中:為系數矩陣;K、K、K為艦艇在3個方向上的等效磁化率, 與艦艇的材料、質量以及體積尺寸相關;和分別為艦艇長軸與短軸方向上的去磁系數, 在將潛艇看作旋轉橢球體模型時,和可以通過式(7)計算得到[11]
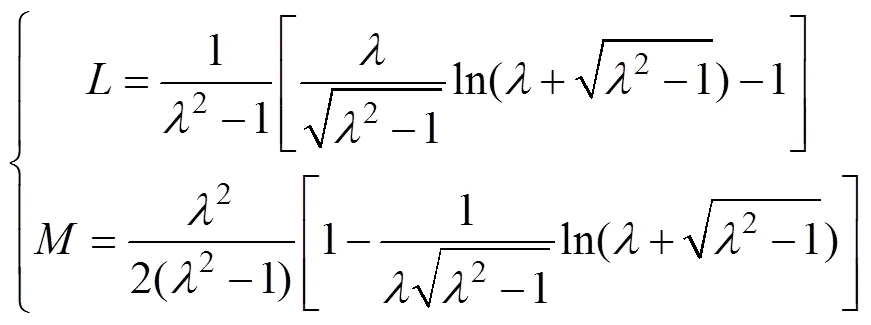

表1 橢球體退磁因子
選擇正確的潛艇尺寸與材料參數, 根據式(7)可以算出系數矩陣, 再乘以潛艇長、寬、高3個方向上的地磁場值, 即可計算得到潛艇在3個方向上的磁矩值。但由于式(6)描述的磁矩計算公式中, 所需地磁場值是潛艇坐標系下的, 所以需先將地理坐標系下的地磁場值轉換到潛艇坐標系下, 如圖2所示。
潛艇磁場在潛艇坐標系與地理坐標系之間的變換關系為
式中:為變換矩陣;H表示地磁場值, 下標、、為地理坐標系,、、為潛艇坐標系。
從以上推導可以看出, 在潛艇尺寸和材料等參數確定了的情況下, 其3個方向上的磁矩即可由所處海域的地磁場H以及航向角完全確定。
由于文中所要計算的是潛艇在地理坐標系下的磁場, 因此需要將在潛艇坐標系下的計算結果再變換到地理坐標系下, 最終可得到三軸偶極子在地理坐標系下產生的磁感應強度為


3 感應磁矩形成的磁異常


為了仿真潛艇磁異常的分布, 并對比不同海域與航向下潛艇磁異常的差別, 設潛艇分別處于在高緯度海域與低緯度海域航行的2種情況, 2種海域的地磁場值如表2所示。

表2 不同海域的地磁場強度
反潛機所探測到的潛艇磁異常只與潛艇和反潛機之間的相對位置有關, 與潛艇航行深度無直接關系。假設潛艇的固有磁性已完全消除, 只考慮潛艇的感應磁性在探潛平面上形成的磁異常, 取反潛飛機距潛艇的飛行高度為300 m, 采用MATLAB仿真潛艇上方=300 m的平面上,、方向為±1 000 m范圍內, 高低2種海域位置, 南北、東西2種航向, 共4種條件下反潛飛機所探測到的潛艇磁異常強度分布, 結果如圖3~6所示。
通過仿真結果可得出結論如下。
1) 潛艇感應磁異常在300 m高空處的強度值約為0.3~2 nT, 分布特性為典型的磁偶極子場。
2) 對于特定的潛艇, 南北向航行時的磁異常強度要大于東西向航行時, 因為潛艇在長度方向的退磁因子要遠小于寬度方向, 在外場下更容易磁化。因此潛艇在被反潛機搜索時, 應調整為東西向航行, 可降低被發現的概率。
3) 航向對潛艇感應磁異常有重要的影響, 但在高緯度海域表現的不如低緯度海域明顯。因為高緯度海域地磁場垂直分量大, 而垂直分量引起的感應磁場與航向無關。
以上仿真結果得出的結論, 都與實際情況相符, 且仿真結果的量值與文獻[13]采用的有限元法得到的值基本相同, 其分布特性與文獻[14]記載的一致, 基本印證了文中所建立的潛艇感應磁異常計算模型的正確性。
4 結束語
利用潛艇形狀類似于旋轉橢球體的特點, 在文中將潛艇磁矩分解為3個方向正交的磁偶極矩, 依據橢球體模型在外場中的磁化規律, 由潛艇的尺寸、形狀等參數以及地磁場值推導出潛艇磁矩的計算公式, 并根據反潛飛機磁探儀的探測原理, 得到潛艇的磁異常計算模型, 可較為精確地計算潛艇感應磁異常。最后對所建立的計算模型進行了軟件仿真, 仿真結果與實際情況基本符合, 表明文中所建立的數學模型的正確性。
文中只針對潛艇的感應磁性引起的磁異常做了一些基礎性研究, 后續還需結合潛艇固定磁性與感應磁性對潛艇磁異常進行全面的研究, 再根據當前航空磁探的實際情況, 對潛艇磁異常的精細特性做進一步研究。
[1] 義井胤景. 磁工學[M]. 胡超, 譯. 北京:國防工業出版社, 1977.
[2] 張朝陽, 虞偉喬. 基于磁偶極子等效的潛艇空間磁場分布[J]. 艦船科學技術, 2013, 35(1): 31-34.
Zhang Chao-yang, Yu Wei-qiao. Research on Spatial Magnetic Field Distributing of Submarine Based on Magnetic Dipole Equivalent[J]. Ship Science and Technology, 2013, 35(1): 31-34.
[3] 王珺琳, 劉金榮, 呂政良, 等. 基于空間磁場模型的航空磁探測分析方法[J]. 中國電子科學研究院學報, 2016, 11(1): 32-35.
Wang Jun-lin, Liu Jin-rong, Lü Zheng-liang, et al. The Aeromagnetic Exploration Analysis Method Based on Spatial Magnetic Field Model[J]. Journal of China Academy of Electronics and Information Technology, 2016, 11(1): 32-35.
[4] 伍東凌, 石超, 王秀. 潛艇磁異常信號與方位對應關系的研究[J]. 艦船電子工程, 2012, 32(9): 56-58.
Wu Dong-ling, Shi Chao, Wang Xiu. Study of Relationship between Magnetic Anomaly Signal and Location Information of the Submarine[J]. Ship Electronic Engineering, 2012, 32(9): 56-58.
[5] 單志超, 曲曉慧, 楊日杰, 等. 潛艇航向對直升機磁異探潛的影響[J]. 火力與指揮控制, 2013, 38(2): 62-68.
Shan Zhi-chao, Qu Xiao-hui, Yang Ri-jie, et al. Research on Effect of Helicopter Magnetic Anomaly Detecting Submarine from Change of Submarine Heading[J]. Fire Control & Command Control, 2013, 38(2): 62-68.
[6] 周家新, 陳建勇, 單志超, 等. 航空磁探中潛艇磁場建模方法分析[J]. 海軍航空工程學院學報, 2017, 32(1): 143-148.
Zhou Jia-xin, Chen Jian-yong, Shan Zhi-chao, et al. Analysis of Submarine Magnetic Field Modeling Method for Aero Magnetic Detection[J]. Journal of Naval Aeronautical and Astronautical University, 2017, 32(1): 143-148.
[7] 張昌達. 關于磁異常探測的若干問題[J]. 工程地球物理學報, 2007, 4(6): 550-551.
Zhang Chang-da. Some Problems Concerning the Magnetic Anomaly Detection(MAD)[J]. Chinese Journal of Engineering Geophysics, 2007, 4(6): 550-551.
[8] Nan Zan, Arye Nehorai. Detection of Ship Wakes Using an Airborne Magnetic Transducer[J]. IEEE Transactions on Geoscience and Remote Sensing, 2000, 38(1): 532-538.
[9] 葉平賢, 龔沈光. 艦船物理場[M]. 北京: 兵器工業出版社, 1992.
[10] 周耀忠, 張國友. 艦船磁場分析計算[M]. 北京: 國防工業出版社, 2004.
[11] 趙凱華, 陳熙謀. 電磁學[M]. 北京: 高等教育出版社, 1985.
[12] 張昌達. 量子磁力儀研究和開發近況[J]. 物探和化探, 2005, 29(6): 283-287.
Zhang Chang-da. Recent Advances in the Research and Development of Quantum Magnetometers[J]. Geophysical and Geochemical Exploration, 2005, 29(6): 283-287.
[13] 吳芳, 吳銘, 楊日杰, 等. 反潛巡邏機運動態勢對潛艇磁異常信號的影響分析[J]. 測試技術學報, 2017, 31(4): 283-289.
Wu Fang, Wu Ming, Yang Ri-jie, et al. Analysis the Affection of the Anti-Submarine Aircraft’s Movement Situation to the Magnetic Anomaly Signal of Submarine[J]. Journal of Test and Measurement Technology, 2017, 31(4): 283-289.
[14] 崔凱興. 潛艇標量磁場在探潛平面上的分布研究[J]. 科技廣場, 2014(12): 15-18.
Cui Kai-xing. Research on the Distribution of Submarine Scalar Field in Anti-Submarine Plane[J]. Science Mosaic, 2014(12): 15-18.
(責任編輯: 許 妍)
Magnetic Anomaly Calculation Model of Submarine Based on Induced Magnetic Field
LIU Hui
(Kunming Shipborne Equipment and Test Center, China Shipbuilding Industry Corporation, Kunming 650051, China)
The magnetic anomaly of a submarine caused by geomagnetic induction is an important evidence for modern airborne anti-submarine measure. It is of great significance to study the magnetic anomaly for submarine protection. In view of the present situation that there isn't complete calculation model for submarine induced magnetic anomaly, this paper regards the induced magnetic moment of submarine as the superposition of three orthogonal magnetic dipole moments by means of magnet simulation. According to the magnetization law of the ellipsoid model of a submarine in outfield, the magnetic moment expression of a submarine is derived, and then, the computational formula of submarine magnetic anomaly is obtained. Further, the simulation is performed to achieve the induced magnetic anomaly strength distribution of a submarine at high attitude area, and the result conforms to the actual situation, which verifies the correctness of the proposed calculation model.
airborne anti-submarine; submarine; magnetic anomaly; magnetic dipole; induced magnetic field
TJ67; O484.52; U665.18
A
2096-3920(2018)02-0152-05
10.11993/j.issn.2096-3920.2018.02.009
劉輝. 基于感應磁場的潛艇磁異常計算模型[J]. 水下無人系統學報, 2018, 26(2): 152-160.
2018-01-05;
2018-02-01.
劉 輝(1987-), 男, 工程師, 主要研究方向為目標磁特性模擬技術
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
當代陜西(2022年6期)2022-04-19 12:11:54
計算機應用(2022年2期)2022-03-01 12:33:42
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
光學精密工程(2016年6期)2016-11-07 09:07:19
