基于多鋼纜并聯機構的擦窗機吊船系統設計
2018-05-07 06:52:04張碩孫佳張珂
科技創新導報 2018年1期
張碩 孫佳 張珂

摘 要:擦窗機是在懸吊式裝飾、裝修機械基礎上發展起來,是一種操作靈活、方便,作業安全、高效、環保的高空清洗作業設備,針對接近作業困難,提出將多條鋼絲繩欠約束并聯技術應用于懸吊式擦窗機作業吊船機構提升中,解決復雜空間結構接近作業難題,在分析鋼絲繩牽引鏈技術上,研究吊船在作業過程中的反向運動學,考慮鋼纜牽引作用下的作業空間優化,設計開發擦窗機吊船作業機構并投入實際工程。
關鍵詞:多鋼纜并聯機構 擦窗機 吊船系統
中圖分類號:U463.836 文獻標識碼:A 文章編號:1674-098X(2018)01(a)-0125-02
隨著現代化城市建設速度的提升,越來越多高層、超高層建筑如雨后春筍般涌現,各種新材料廣泛地使用在高層建筑的外墻裝飾中。清洗高層建筑物的外墻是一項危險、繁重的工作。
目前由于實際工程的需要,個別項目中出現采用多鋼纜提升作業平臺的作業方式,但這種方式中主要采用多牽引點逐一調節控制,進而使作業平臺工作過程中很難保持水平,提升牽引點經常處于受力不均形成欠約束狀態導致作業設備發生危險。針對多鋼纜擦窗機的吊船機構存在欠約束等理論問題,本文對多鋼纜并聯技術在擦窗機設備應用適應性進行研究并基于并聯控制理論提出一種綜合的控制方法。
1 擦窗機主要技術特點
關于擦窗機設計過程中需要考慮的主要技術參數有:
(1)額定載重量是用來表示擦窗機吊船允許承受的最大有效重量。
(2)吊船相對臺車的水平移動變幅速度以及吊船相對于臺車底盤回轉的線速度,這兩個速度是為吊船適應建筑物而對吊船作業位置進行調整的速度。
(3)擦窗機工作高度或者稱為作業高度是指擦窗機吊船作業的最高點與最低點的垂直距離。
2 多鋼纜欠約束并聯技術的設計
2.1 柔索并聯牽引機構
從奇異約束機構考慮,柔索并聯牽引機構常常由欠約束、全部約束和過度約束等多種類型;但大部分牽引過程的并聯機構均處于欠約束狀態,這也是提升過程特點,眾多研究學者在并聯柔索機構研究中重點研究實際應用中約束方式,通過加入約束機構對并聯柔性鋼纜的運動狀態進行分析、運動模型進行構建,給出可行的并聯柔性鋼纜牽引機構。研究過程中可以利用約束機構串并聯等效的特性,建立了具有約束并聯柔索機構運動學正解的通用迭代方法。并分析了特殊設計的并聯柔索機構的運動學正解的解析方法,并對幾種并聯柔索機構的運動學正、逆解進行分析。歸納了具有約束并聯柔索機構的運動學、靜力學建模方法;將并聯柔索機構靜力平衡的矢量閉合條件推廣以適用有約束情況。給出具有約束并聯柔索機構工作空間的定義;分析了兩種并聯柔索機構的工作空間;分析了有約束并聯柔索機構的力平衡的條件;給出判別方法;指出約束機構在回避奇異位形中的應用。
2.2 柔索并聯方程的建立
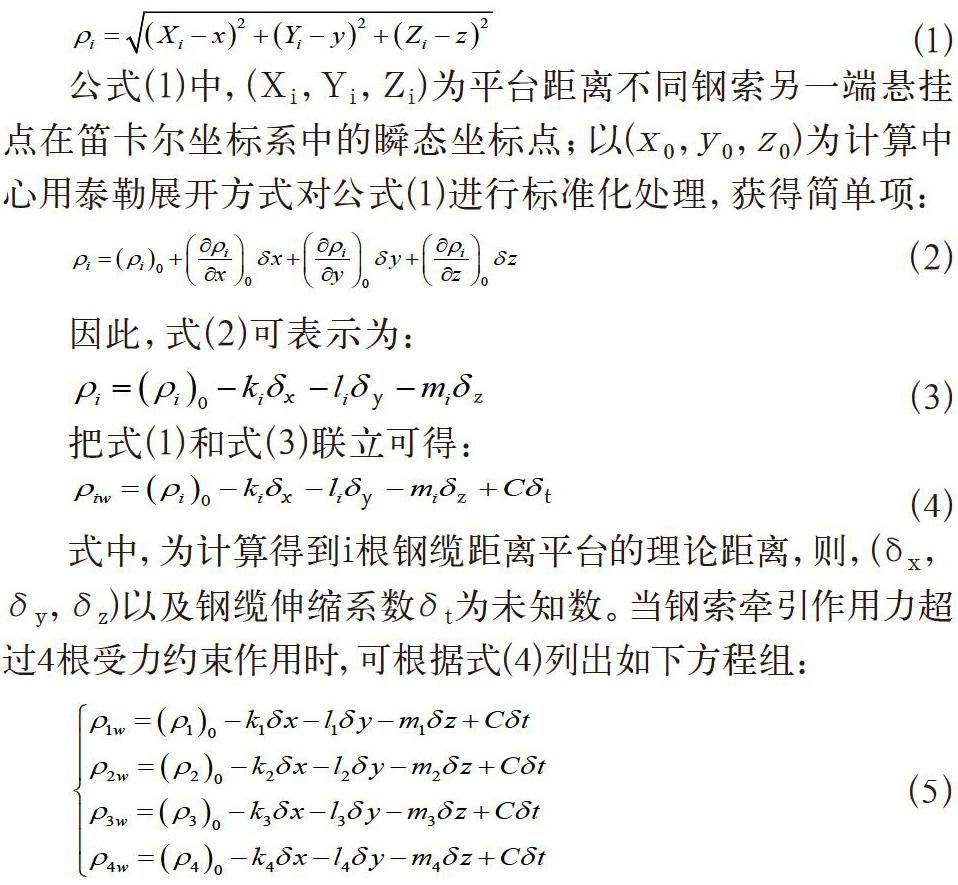
研究中i根鋼索確定終端平臺位置之間幾何距離ρi的計算分析過程如下,若作業平臺在笛卡爾坐標系中的瞬態坐標位置為(x,y,z),則平臺位置間幾何距離ρi的另一種表達式為:
公式(1)中,(Xi,Yi,Zi)為平臺距離不同鋼索另一端懸掛點在笛卡爾坐標系中的瞬態坐標點;以(x0,y0,z0)為計算中心用泰勒展開方式對公式(1)進行標準化處理,獲得簡單項:
式中,為計算得到i根鋼纜距離平臺的理論距離,則,(δx,δy,δz)以及鋼纜伸縮系數δt為未知數。當鋼索牽引作用力超過4根受力約束作用時,可根據式(4)列出如下方程組:
最后求得的(x0,y0,z0)值即為最優解。
3 基于并聯擦窗機吊船平臺卡爾曼濾波模型的建立
為減小氣壓和GPS單獨測量高度過程中產生的誤差,發揮兩種測量方法的優點,提高高度數據測量精度,提出氣壓輔助GPS高度測量、氣壓和GPS數據融合處理兩種組合測高方法。經主要指標和特點對比,確定氣壓和GPS測高數據融合方法為研究主要內容;通過對不同數據融合技術進行對比分析,選用卡爾曼濾波技術作為數據融合方法。考慮實際施工環境及作業條件對測量精度的要求,建立了適用于高處作業平臺施工高度測量數據融合模型,并對模型進行了驗證性研究。高處作業平臺施工過程動力學方程的建立,由于氣壓/GPS組合測高系統與高處作業平臺固聯,因此可以將高處作業平臺和氣壓/GPS組合測高系統看作一個整體來進行平臺施工過程中動力學方程的建立。用一個線性離散系統來描述高處作業平臺施工過程,以高處作業平臺在k時刻的實際施工高度以及氣壓/GPS高度測量數據的最大相對誤差作為系統當前的狀態變量X,則X的參數定義如下:
式(6)中,x為高處作業平臺豎直方向的高度,單位取m;為GPS高度測量數據的最大相對誤差;為氣壓高度測量數據的最大相對誤差,最大相對誤差可根據實驗數據統計計算得到。
計算中采用離散方式描述系統狀態參數的變化過程,由于氣壓/GPS組合測高系統沒有控制增益,因此為0,得到k時刻該線性離散系統動力學方程如下:
4 結語
按照卡爾曼濾波模型的建立方法構建誤差修正模型。將卡爾曼濾波模型優化后的高度值與實際高度值進行比較,對卡爾曼融合前后高度測量數據相對誤差進行分析,通過改進卡爾曼濾波模型,提高高度測量數據的融合精度,減小測量的相對誤差,提高對實際使用的適應性。
參考文獻
[1] 牛文歡,張進生,王志,等.現代高空作業平臺的發展概況與趨勢[J].建設機械技術與管理,2013(2):97-100.
[2] 吳玉厚,孫佳,張珂.建筑施工懸吊式作業裝備與技術[M].北京:機械工業出版社,2014.
[3] 武永峰,袁明慧.2004—2012年我國建筑施工事故統計分析[J].價值工程,2014(21):96-98.
[4] 孟煒.高度測量數據處理及算法的研究[D].西北工業大學,2005.
